Изобретение относится к области автоматики и вычислительной техники и может быть использовано для связи аналоговых источников информации с цифровым вычислительным устройством.
Известен способ измерения угла поворота вала, основанный на преобразовании угла α поворота вала в два сигнала переменного тока, сдвинутых по фазе пропорционально углам α и -α относительно опорного сигнала, преобразовании сдвинутых по фазе сигналов в периодические последовательности ST и SP импульсов, формировании текущих значений угла путем измерения длительности временных интервалов между ST и SP импульсами [1].
Недостатком известного способа является динамическая погрешность, вызванная смещением импульса начала временного интервала к моменту его окончания, т.е. к моменту окончания формирования значения угла α. Величина динамической погрешности зависит от длительности временных интервалов между ST и SP импульсами и скорости вращения вала. Неопределенность момента окончания формирования значения угла α по отношению к опорному сигналу усложняет процесс обмена информацией с вычислительным устройством и может вносить дополнительную погрешность запаздывания приема информации вычислительным устройством. Кроме того, диапазон работы в известном устройстве ограничен половиной полюсного деления фазовращателя.
Наиболее близким техническим решением к данному изобретению является способ измерения угла поворота вала, основанный на преобразовании угла (поворота вала в два сигнала переменного тока, сдвинутых по фазе пропорционально углам α и -α относительно опорного сигнала, преобразовании сдвинутых по фазе сигналов в периодические последовательности ST и SP импульсов, измерении величины фазовых сдвигов ST и SP импульсов в моменты их формирования в границах периода опорного сигнала и формировании текущих значений угла в виде разности фазовых сдвигов ST и SP импульсов в моменты их формирования в границах периода опорного сигнала [2].
Недостатки такого способа аналогичны недостаткам предыдущего способа. Величина динамической ошибки зависит от разности фазовых сдвигов ST и SP импульсов в моменты их формирования относительно опорного сигнала и скорости вращения вала.
В предложенном способе измерения угла поворота вала, основанном на преобразовании угла α поворота вала в два сигнала переменного тока, сдвинутых по фазе пропорционально углам α и -α относительно опорного сигнала, преобразовании сдвинутых по фазе сигналов в периодические последовательности ST и SP импульсов, измерении величины фазовых сдвигов ST и SP импульсов в моменты их формирования в границах периода опорного сигнала и формировании текущих значений угла α, подразделяют цикл измерения фазовых сдвигов ST и SP импульсов на временные интервалы записи и чтения, кратные целому числу периодов опорного сигнала, устанавливают длительность интервалов записи не менее двух периодов опорного сигнала, запоминают последние измеренные значения фазовых сдвигов ST и SP импульсов в интервалах записи, формируют дискретные приращения фазы при переходах ST и SP импульсов через границы периода опорного сигнала, определяют полные значения фазовых сдвигов ST и SP импульсов на моменты их формирования в интервалах записи, измеряют приращения полных значений фазовых сдвигов ST импульсов или SP импульсов в текущих интервалах записи по сравнению с предыдущими, измеряют длительность временных интервалов между моментами измерения запоминаемых фазовых сдвигов ST импульсов или SP импульсов в соседних интервалах записи, определяют текущую скорость изменения фазовых сдвигов ST и SP импульсов, экстраполируют фазовые сдвиги ST и SP импульсов на моменты начала интервалов чтения, а текущие значения угла α формируют в виде разности полных фазовых сдвигов ST и SP импульсов на начало текущего интервала чтения.
Структурная схема одного из возможных вариантов устройств для реализации способа представлена на чертеже.
Устройство с использованием цифровых логических элементов содержит генератор 1 импульсов, делитель 2 частоты, фильтр 3, датчик 4 угла, блок 5 фазосдвигающих элементов, блок 6 компараторов, блок 7 синхронизации, блоки 8 и 9 памяти, шину 10 данных, измерители 11 и 12 фазовых смещений, измеритель 13 скорости, сумматор 14.
Выход генератора 1 через последовательно соединенные делитель 2 и фильтр 3 подключен к обмотке возбуждения датчика 4, синусный и косинусный выходы которого подключены к соответствующим входам блока 5. Два выхода блока 5 через соответствующие компараторы блока 6 подключены к первому и второму входам блока 7, первый и второй выходы которого подключены к входам синхронизации блоков 8 и 9, а третий и четвертый выходы блока 7 подключены к входам чтения блоков 8 и 9. Выходы разрядов делителя 2 подключены к информационным входам блоков 8 и 9 и к группе входов блока 7, третий вход которого соединен с выходом генератора 1. Выходы n каждого из блоков 8 и 9 через шину 10 данных подключены к первым группам входов измерителей 11 и 12. Выходы n младших разрядов и выходы старших разрядов блока 8 через шину 10 подключены к первой группе входов измерителя 13. Первые группы выходов измерителей 11 и 12 подключены соответственно к первой и второй группам входов сумматора 14, выходы которого являются выходами устройства. Вторая и третья группы выходов измерителя 11 подключены соответственно к второй и третьей группам входов измерителя 13, группа выходов которого подключена к вторым группам входов измерителей 11 и 12.
Измеритель 11 содержит блоки 15 и 16 памяти, блок 17 сравнения, накопитель 18, сумматоры 19 и 20, блок 21 задания длительности периода опорного сигнала и умножитель 22. Первая группа входов измерителя 11 подключена к входам блока 15, к первой группе входов сумматора 19 и к младшим разрядам первой группы входов сумматора 20. Два старших n и n-1 разряды первой группы входов измерителя 11 подключены к первой группе входов блока 17. Выходы блока 15 являются второй группой выходов измерителя 11. Два старших n и n-1 разряды выходов блока 15 подключены к второй группе входов блока 17. Один и другой выходы блока 17 подключены к соответствующим входам накопителя 18, выходы которого являются третьей группой выходов измерителя 11 и подключены к старшим разрядам первой группы входов сумматора 20. Выходы блока 21 подключены к второй группе входов сумматора 19, выходы которого подключены к одной группе входов умножителя 22. Другая группа входов умножителя 22 является второй группой входов измерителя 11, а выходы умножителя 22 подключены к второй группе входов сумматора 20, выходы которого подключены к входам блока 16. Выходы блока 16 являются первой группой выходов измерителя 11.
В измерителе 12 в отличие от измерителя 11 отсутствуют вторая и третья группы выходов. В остальном измеритель 12 выполнен аналогично измерителю 11.
Измеритель 13 скорости содержит блоки 23 и 24 памяти, сумматоры 25, 26 и 27, блок 28 задания периода чтения (записи), делитель 29 с памятью. Первая группа входов сумматора 25 является первой группой входов измерителя 13, старшие разряды которой через блок 23 памяти подключены к старшим разрядам второй группы входов сумматора 25. Младшие разряды второй группы входов сумматора 25 являются второй группой входов измерителя 13. Выходы сумматора 25 подключены к одной группе входов сумматора 27, другая группа входов которого соединена с выходами блока 28. Выходы сумматора 27 подключены к одной группе входов делителя 29. Младшие n разрядов первой группы входов измерителя 13 подключены к младшим разрядам первой группы входов сумматора 26, а старшие разряды первой группы входов сумматора 26 являются третьей группой входов измерителя 13 и через блок 24 подключены к старшим разрядам второй группы входов сумматора 26, младшие разряды которой соединены с второй группой входов измерителя 13. Выходы сумматора 26 подключены к другой группе входов делителя 29, выходы которого являются выходами измерителя 13.
Блок 5 может быть выполнен на основе фазосдвигающих RC-цепочек или на основе интегратора и сумматоров (см., например, А.Е.Зверев и др. Преобразователи угловых перемещений в цифровой код. Л., «Энергия», 1974, с.95-96, рис.37, 39). Блок 7 синхронизации предназначен для:
- синхронизации выходных импульсов компараторов блока 6 с импульсами генератора 1;
- формирования в цикле измерения временных интервалов записи и чтения;
- формирования последовательности тактов, управляющих работой устройства (на чертеже не представлены).
Блок 7 содержит дешифратор, входы которого являются группой входов блока 7. На одних выходах дешифратора установлены ключи, коммутирующие импульсы компараторов блока 6 на выходы блока 7 в интервалах записи информации в блоки 8 и 9. На других выходах дешифратора формируются последовательности тактов управления работой устройства в интервалах чтения.
Функциональное назначение остальных элементов и блоков устройства будет представлено в процессе описания его работы. Выбор типа элементов и блоков при реализации устройства определяется видом информационных сигналов. При работе с дискретными информационными сигналами в качестве блоков памяти могут быть использованы цифровые регистры, а в качестве накопителей - счетчики.
Устройство с дискретными информационными сигналами работает следующим образом. Выходные импульсы генератора 1 частотой fги поступают на делитель 2, на выходах разрядов которого формируется сигнал цифровой развертки. Опорный сигнал типа «меандр» частотой f=fги/2n с выхода одного из разрядов делителя 2 в фильтре 3 преобразуется в синусоидальный сигнал запитки обмотки возбуждения датчика 4. На выходах датчика 4 формируются два сигнала несущей частоты f, модулированные по амплитуде в функции синуса и косинуса угла α поворота вала. В блоке 5 модулированные по амплитуде сигналы преобразуют в фазомодулированные сигналы. В результате с помощью датчика 4 и блока 5 фазосдвигающих элементов преобразуют угол α поворота вала в два сигнала переменного напряжения, сдвинутых по фазе пропорционально углам α и -α относительно опорного сигнала. Одним из компараторов блока 6 преобразуют сдвинутый по фазе пропорционально углу α сигнал в периодическую последовательность ST импульсов частотой f, а другим компаратором блока 6 преобразуют сдвинутый по фазе пропорционально углу -α сигнал в периодическую последовательность SP импульсов частотой f. В блоке 7 сформированные ST и SP импульсы синхронизируют импульсами генератора 1 так, чтобы их фронты не совпадали с моментами смены информации в делителе 2.
В блоке 7 с помощью входящего в него дешифратора выходных сигналов старших (n и выше) разрядов делителя 2 подразделяют цикл измерения фазовых сдвигов ST и SP импульсов на временные интервалы записи и чтения, кратные целому числу периодов опорного сигнала. Устанавливают дешифратором блока 7 длительность интервалов записи не менее двух периодов опорного сигнала из расчета обязательного попадания ST и SP импульсов в текущий интервал записи при заданной скорости вращения вала. Длительность цикла измерения фазовых сдвигов ST и SP импульсов можно изменять коэффициентом передачи старших (n и выше) разрядов делителя 2. По ST импульсам, поступающим в интервале записи на вход синхронизации блока 8, в него записывается текущий код делителя 2. Аналогично по SP импульсам текущий код делителя 2 записывается в блок 9. Записанные коды хранятся в блоках 8 и 9 до моментов смены кодов очередными ST и SP импульсами в интервалах записи информации. В результате в блоках 8 и 9 запоминают последние измеренные значения фазовых сдвигов ST и SP импульсов и моменты их формирования в интервалах записи. При работе в интервалах записи выходы блоков 8 и 9 на шину 10 заблокированы.
В интервале чтения формируют дискретные приращения фазы при переходе ST и SP импульсов через границы периода опорного сигнала. Сначала из блока 7 на вход чтения блока 8 подается сигнал, по которому выходная информация блока 8 подключается к шине 10. В блоке 17 измерителя 11 сравнивают n и n-1 разряды текущего измерения фазового сдвига ST импульсов с выходов блока 8 с аналогичными разрядами фазового сдвига ST импульсов предыдущего измерения с выходов блока 15. Если в текущем интервале записи значения обоих разрядов изменилось с 1 на 0 по сравнению с предыдущим, то произошел переход через границу периода опорного сигнала в сторону увеличения фазового сдвига и по тактовому импульсу с выхода блока 7 (на чертеже не представлен) один выходной сигнал блока 17 увеличивает на 1 содержимое накопителя 18. Если в текущем интервале записи значение обоих разрядов изменилось с 0 на 1 по сравнению с предыдущим, то произошел переход через границу периода опорного сигнала в сторону уменьшения фазового сдвига и другой выходной сигнал блока 17 уменьшает на 1 содержимое накопителя 18. Таким образом, при переходах ST и SP импульсов через границы опорного сигнала на выходах блока 17 формируют дискретные приращения фазы, соответствующие одному периоду опорного сигнала. Полные значения фазовых сдвигов ST импульсов на моменты их формирования в интервале записи определяются значениями разрядов от 0 до n блока 8 и значениями n+1 и выше разрядов накопителя 18.
В сумматоре 26 измерителя 13 определяют приращение полных значений фазовых сдвигов ST импульсов в текущих интервалах записи по сравнению с предыдущими. Для этого из полного значения фазы в текущем измерении с выходов блока 8 и накопителя 18 вычитают полное значение фазы предыдущего измерения с выходов блока 15 (младшие n разрядов) и выходов блока 24 (старшие n+1 и выше разрядов).
В блоках 23, 25, 27 и 28 измерителя 13 определяют длительности временных интервалов между моментами измерения фазовых сдвигов ST импульсов в соседних интервалах записи. Для этого в сумматоре 25 определяют разность между моментом формирования фазового сдвига в текущем измерении с выходов младших и старших разрядов блока 8 и моментом формирования фазового сдвига в предыдущем измерении с выходов блока 15 (младшие разряды) и с выходов блока 23 (старшие разряды). Полученный в сумматоре 25 результат суммируется в сумматоре 27 с расчетным числом периодов опорного сигнала в цикле измерения между началами двух соседних интервалов чтения (записи). Расчетное число периодов задается в блоке 28. Использование старших разрядов с выходов блоков 8 и 23 связано с необходимостью исключения ошибки величиной в период опорного сигнала при определении моментов формирования ST импульсов в динамике, когда фактический период между ST импульсами превышает номинальное значение и формирование ST импульсов совпадает с переходом через границы опорного сигнала.
В делителе 29 определяют текущую скорость изменения фазовых сдвигов ST импульсов. Для этого приращение фазы ST импульсов в соседних интервалах записи с выходов сумматора 26 делят на длительность временного интервала между моментами измерения фазовых сдвигов ST импульсов с выходов сумматора 27. Результат запоминается в делителе 29 до следующего цикла измерений.
В блоках 19…22 измерителя 11 экстраполируют фазовый сдвиг ST импульсов на момент начала интервала чтения. Для этого в сумматоре 19 определяют временной интервал от момента формирования ST импульса до окончания интервала записи, что соответствует разности между максимальным значением младших n разрядов цифровой развертки делителя 2 (задается в блоке 21) и текущим значением n разрядов с выходов блока 8. В блоке 22 формируют экстраполяционную поправку путем умножения текущей скорости изменения фазовых сдвигов ST импульсов с выходов делителя 29 на величину временного интервала с выходов сумматора 19. Полное значение фазовых сдвигов ST импульса на момент окончания интервала записи с учетом поправки определяют в сумматоре 20 и запоминают в блоке 16. Одновременно в блоках 15 и 23 запоминают выходную информацию младших и старших разрядов блока 8, которая для следующего интервала чтения становится информацией предыдущего измерения. При запоминании текущей информации в блоках памяти предыдущая информация стирается.
Далее сигнал чтения отключается от входа блока 8 и подается на вход блока 9. Выходная информация блока 9 подключается к шине 10. В блоке 17 измерителя 12 сравнивают n и n-1 разряды текущего измерения фазового сдвига SP импульсов с выходов блока 9 с аналогичными разрядами фазового сдвига SP импульсов предыдущего измерения с выходов блока 15. В результате в измерителе 12, аналогично измерителю 11, формируют полные значения фазовых сдвигов SP импульсов на момент их формирования от начала измерения.
Скорость изменения фазовых сдвигов SP импульсов равна по модулю и противоположна по знаку скорости изменения фазовых сдвигов ST импульсов. Поэтому при экстраполяции фазовых сдвигов SP импульсов в измерителе 12 используют полученное в делителе 29 значение скорости с противоположным знаком. Остальные действия по определению в измерителе 12 полного значения фазовых сдвигов SP импульса на момент окончания интервала записи с учетом экстраполяционной поправки аналогичны ранее рассмотренным действиям в измерителе 11.
Текущие значения угла (формируют в сумматоре 14 в виде разности полных фазовых сдвигов ST и SP импульсов на начало текущего интервала чтения.
В другом варианте устройства для реализации способа все действия, выполняемые измерителями 11, 12, 13 и сумматором 14, можно возложить на микроконтроллер. Порядок выполнения действий на микроконтроллере аналогичен рассмотренным действиям на элементах дискретной техники.
При выполнении устройства для реализации способа на аналоговых элементах делитель 2 заменяется генератором пилообразного напряжения с компаратором для формирования опорного сигнала типа «меандр» для фильтра 3. Частота f генератора 1 выбирается равной частоте запитывающего сигнала датчика 4, в качестве блоков памяти используются блоки выборки-хранения, в качестве накопителей - интеграторы. Цифровые сумматоры, блоки умножения и деления заменяют аналоговыми элементами того же функционального назначения. Для формирования уровней выходных напряжений в блоке 17 при переходе через границу периода опорного сигнала могут быть использованы компараторы.
Технический эффект от использования предложенного способа измерения угла поворота вала состоит в снижении динамической погрешности измерения и в расширении диапазона изменения углов.
Источники информации
1. Авторское свидетельство СССР №746656, Кл. Н03М 1/64, 1977 г.
2. Авторское свидетельство СССР №840994, Кл. Н03М 1/64, 1978 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2013 |
|
RU2534971C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ МНОГООТСЧЕТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ВРЕМЕННЫХ ИНТЕРВАЛОВ В КОД | 2008 |
|
RU2355105C1 |
| Корреляционный измеритель фазовых соотношений узкополосных случайных процессов | 1990 |
|
SU1714616A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ФАЗОВРАЩАТЕЛЕЙ | 1990 |
|
RU2015616C1 |
| ПРИЕМНИК СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2118054C1 |
| СПОСОБ ПРОВЕРКИ МНОГООТСЧЕТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ВРЕМЕННЫХ ИНТЕРВАЛОВ В КОД | 2007 |
|
RU2349029C1 |
| Устройство для отображения векторных диаграмм на экране электронно-лучевой трубки | 1988 |
|
SU1541663A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1993 |
|
RU2108663C1 |
| Цифровой фазометр | 1986 |
|
SU1348744A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1988 |
|
SU1647901A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано для связи аналоговых источников информации с цифровым вычислительным устройством. Технический результат - снижение динамической погрешности измерения и расширение диапазона изменения углов. Способ измерения угла поворота вала основан на преобразовании угла α поворота вала в два сигнала переменного тока, сдвинутых по фазе пропорционально углам α и -α относительно опорного сигнала, преобразовании сдвинутых по фазе сигналов в периодические последовательности ST и SP импульсов, измерении величины фазовых сдвигов ST и SP импульсов в моменты их формирования в границах периода опорного сигнала. Цикл измерения фазовых сдвигов ST и SP импульсов подразделяют на временные интервалы записи и чтения, кратные целому числу периодов опорного сигнала. Текущие значения угла α формируют в виде разности полных фазовых сдвигов ST и SP импульсов на начало текущего интервала чтения. 1 ил.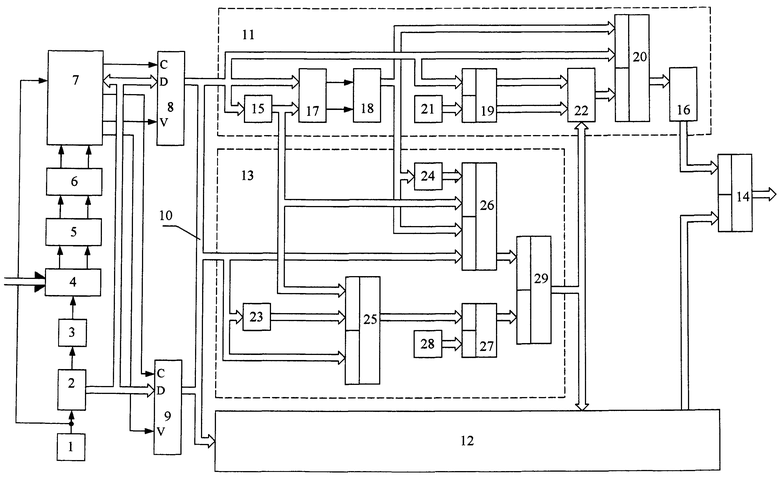
Способ измерения угла поворота вала, основанный на преобразовании угла α поворота вала в два сигнала переменного тока, сдвинутых по фазе пропорционально углам α и -α относительно опорного сигнала, преобразовании сдвинутых по фазе сигналов в периодические последовательности ST и SP импульсов, измерении величины фазовых сдвигов ST и SP импульсов в моменты их формирования в границах периода опорного сигнала и формировании текущих значений угла α, отличающийся тем, что подразделяют цикл измерения фазовых сдвигов ST и SP импульсов на временные интервалы записи и чтения, кратные целому числу периодов опорного сигнала, устанавливают длительность интервалов записи не менее двух периодов опорного сигнала, запоминают последние измеренные значения фазовых сдвигов ST и SP импульсов в интервалах записи, формируют дискретные приращения фазы при переходах ST и SP импульсов через границы периода опорного сигнала, определяют полные значения фазовых сдвигов ST и SP импульсов на моменты их формирования в интервалах записи, измеряют приращения полных значений фазовых сдвигов ST импульсов или SP импульсов в текущих интервалах записи по сравнению с предыдущими, измеряют длительность временных интервалов между моментами измерения запоминаемых фазовых сдвигов ST импульсов или SP импульсов в соседних интервалах записи, определяют текущую скорость изменения фазовых сдвигов ST и SP импульсов, экстраполируют фазовые сдвиги ST и SP импульсов на моменты начала интервалов чтения, а текущие значения угла α формируют в виде разности полных фазовых сдвигов ST и SP импульсов на начало текущего интервала чтения.
| Преобразователь угла поворотаВАлА B КОд | 1976 |
|
SU840994A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 1993 |
|
RU2108663C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА | 1993 |
|
RU2107390C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

