Область техники, к которой относится изобретение
Изобретение относится к области авиации, более конкретно к приборному оборудованию, и может быть использовано в приборном оборудовании летательного аппарата для увеличения точности стабилизации заданной траектории при ручном управлении самолетом.
Уровень техники
Известен «Способ пилотирования ЛА по задаваемой траектории с задаваемой скоростью» (Патент RU 2129699, B64D4 3/00, опубл. 03.07.1999), заключающийся в том, что представляют подвижный индекс в виде треугольника, изображающего летательный аппарат при виде на него сзади вдоль вектора скорости и начинающегося от него вектора изменяемой длины, на конце которого расположена окружность изменяемого диаметра, причём ограничение на длину вектора изображается отрезком, изображают задаваемую траекторию полета в виде линии в пространстве, соединенной вертикальными отрезками со своей проекцией на горизонтальную плоскость, при этом задаваемую точку экрана изображают в виде креста, движущегося по задаваемой траектории, причем размер креста зависит от задаваемой скорости полета, совмещают подвижный индекс с задаваемой точкой экрана посредством окаймления креста окружностью вектора, при этом при снятии усилия с ручки управления обеспечивают движение летательного аппарата в направлении, указанном концом вектора.
Недостаток этого способа пилотирования ЛА заключаются в запаздывании реакции самолёта на отклонение органов управления, а следовательно, в запаздывании реакции метки вектора скорости, что затрудняет пилотирование и понижает точность стабилизации траектории полёта.
Известно, что для самолетов нормальной и бесхвостой схемы при создании положительной перегрузки из режима прямолинейного горизонтального полета nу сила, действующая на орган продольного управления, направлена вниз. Поэтому при создании положительной перегрузки самолет на начальном этапе маневра теряет высоту, а исходная величина перегрузки в центре масс начинает уменьшаться. Явление потери высоты при взятии ручки на себя на таких самолетах получило у летчиков название "просадки" самолета, а период времени, в течение которого высота остается меньше исходной, - временем обратной реакции самолета (Клумов А.С. Продольная устойчивость и управляемость маневренного самолета. М.: Машиностроение, 1988, с.74).
Ближайшим аналогом изобретения является способ индикации вектора скорости летательного аппарата (патент RU 2243133, B64D 43/02, опубл. 27.12.2004), заключающийся в том, что автоматически и с повторением определяют поступающую на индикацию величину, представляющую величину подлежащего индикации вектора скорости и зависящую от первого слагаемого, содержащего измеренную и отфильтрованную величину вектора скорости, представляют на экране вывода характерный символ, иллюстрирующий вектор скорости, положение которого на этом экране вывода является представительным для данной поступающей на индикацию величины, при этом для определения упомянутой поступающей на индикацию величины определяют величину производной по времени вектора скорости, который управляется пилотом данного летательного аппарата, вычисляют второе слагаемое на основе величины производной управляемого вектора скорости и вычисляют сумму первого и второго слагаемых, чтобы сформировать упомянутую поступающую на индикацию величину. При этом для определения составляющей индицируемой величины вдоль вертикального направления производную управляемого вектора скорости определяют с учетом одного из следующих сигналов: сигнала коэффициента перегрузки летательного аппарата, сигнала угла наклона траектории летательного аппарата, производной угла наклона траектории летательного аппарата. Кроме того, для определения составляющей индицируемой величины вдоль направления, которое является боковым для данного летательного аппарата и располагающегося под прямым углом по отношению к вертикальному направлению производную управляемого вектора скорости определяют на основе сигнала угловой скорости крена.
Этот способ также имеет указанный выше недостаток, заключающийся в запаздывании реакции метки вектора скорости на отклонение рычагов управления. Взятие производной от величины, которая запаздывает, не устраняет запаздывания вектора скорости. Угловые скорости летательного аппарата (п.7 формулы) запаздывают меньше, чем перегрузки, но это принципиально не меняет дела. Кроме того, наличие производных в сигнале увеличивает его шум (колебания вокруг некоторого среднего значения).
Сущность изобретения
Задачей изобретения является создание такого способа формирования прогноза вектора скорости полета, который сводил бы к минимуму запаздывание метки реакции вектора скорости на отклонение органов управления.
Для решения указанной задачи автоматически и с повторением определяют поступающую на индикацию величину подлежащего индикации вектора скорости, зависящую от измеренной и отфильтрованной величины вектора скорости, при этом определяют также величину производной по времени вектора скорости, который управляется пилотом данного летательного аппарата, вычисляют величину производной управляемого вектора скорости и вычисляют сумму измеренной и отфильтрованной величины вектора скорости и величину производной управляемого вектора скорости, формируют упомянутую поступающую на индикацию величину, согласно изобретению дополнительно измеряют отклонения рычагов управления от их среднего положения, определяемого методом «скользящего среднего» за время, соответствующее времени срабатывания, и умножением измеренного таким образом положения рычага управления на масштабный коэффициент получают прогнозное положение метки вектора скорости полета, который суммируют с полученным ранее положением метки вектора скорости, и представляют на экране вывода характерный символ, иллюстрирующий вектор скорости.
Отличительными признаками предлагаемого способа формирования прогноза вектора скорости полета от указанного выше, известного, наиболее близкого к нему, является измерение отклонения рычагов управления от их среднего положения, определяемого методом «скользящего среднего» за время, соответствующее времени срабатывания, и умножением измеренного таким образом положения рычага управления на масштабный коэффициент получают прогноз вектора скорости полета, который прибавляют к положению метки вектора скорости, полученному известным ранее способом.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в увеличении точности стабилизации заданной траектории при ручном управлении самолетом, в повышении безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Благодаря этим признакам обеспечивается практическое отсутствие запаздывания реакции вектора скорости на отклонение органов управления, чем обеспечивается увеличение точности стабилизации заданной траектории при ручном управлении самолетом, повышение безопасности полета и посадки самолетов, особенно в условиях полета по приборам. В частности, обеспечивается возможность отслеживания метки выравнивания, описанной в патенте RU №2267747.
Предлагаемый способ выполнения захода на посадку иллюстрируется чертежами, представленными на фиг.1÷3.
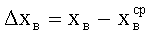
На фиг.1 показана схема углов при формировании вектора скорости и прогноза вектора скорости.
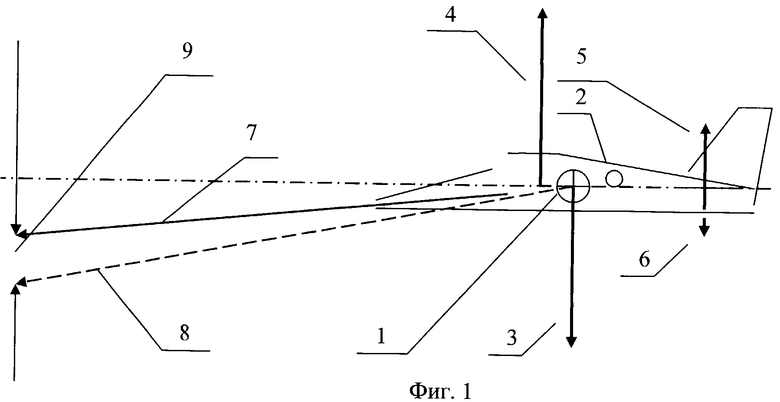
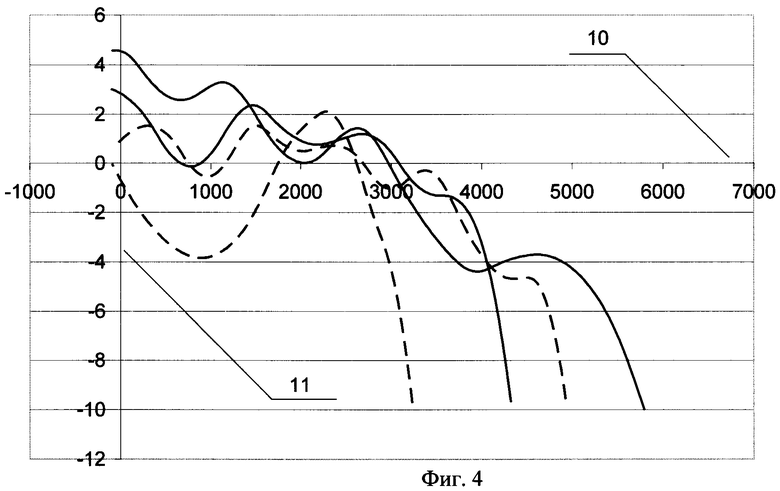
На фиг.2 и 4 показаны примеры отклонений по курсу в зависимости от дальности до взлетно-посадочной полосы (ВПП) при заходе на посадку.
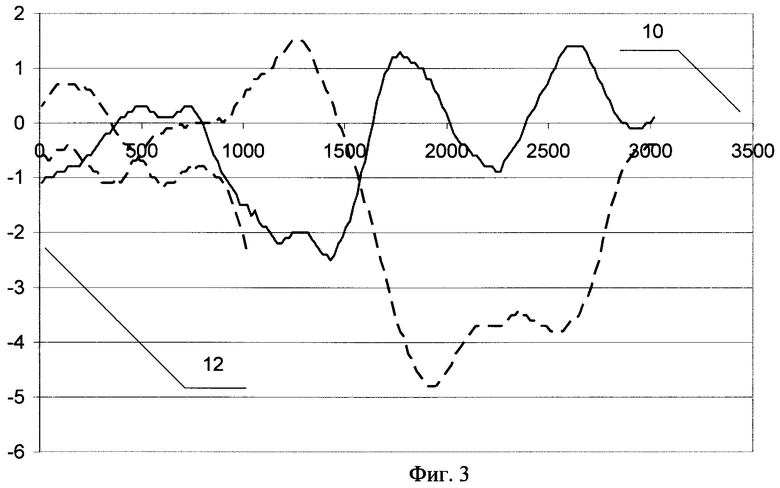
На фиг.3 показан пример отклонений по высоте в зависимости от дальности до ВПП при заходе на посадку.
На фигурах обозначено следующее.
1. Центр тяжести самолета.
2. Фокус самолета.
3. Произведение веса самолета на перегрузку.
4. Подъемная сила самолета без горизонтального оперения.
5. Подъемная сила горизонтального управления.
6. Приращение подъемной силы горизонтального оперения при отклонении ручки управления (штурвала) по тангажу.
7. Начальный вектор скорости.
8. Установившийся через время срабатывания вектор скорости.
9. Прогноз вектора скорости.
10. Дальность до ВПП.
11.Боковое уклонение от оси ВПП.
12. Уклонение от заданной глиссады по высоте.
Осуществление изобретения
Способ формирования прогноза метки вектора скорости полета реализуется следующим образом.
Различают вектор воздушной (относительно воздуха), вектор путевой (относительно земли), вектор относительной (относительно палубы корабля) скорости. Кроме того, в векторе скорости может быть учтена ошибка наведения (применяется при бомбометании). Заявленный способ формирования прогноза вектора скорости полета может быть использован при любом способе формирования самого вектора скорости.
Известно, что для самолетов нормальной и бесхвостой схемы при создании положительной перегрузки из режима прямолинейного горизонтального полета nу сила, действующая на орган продольного управления, направлена вниз. Поэтому при создании положительной перегрузки самолет на начальном этапе маневра теряет высоту, а исходная величина перегрузки в центре масс начинает уменьшаться. Явление потери высоты при взятии ручки на себя на таких самолетах получило у летчиков название "просадки" самолета, а период времени, в течение которого высота остается меньше исходной, - временем обратной реакции самолета». (Клумов А.С. Продольная устойчивость и управляемость маневренного самолета. М.: Машиностроение, 1988, стр.74).
Рассмотрим физический смысл явления "просадки" самолета и запаздывания вектора скорости на примере продольного канала (фиг.1).
На статически устойчивый и сбалансированный в продольном канале самолет в одну сторону действуют силы инерции, приложенные в центре тяжести 1 и равные по величине произведению силы веса на перегрузку 3. Эти инерционные силы уравновешиваются аэродинамическими силами. Для простоты рассуждений аэродинамические силы заменены подъемными силами. Подъемная сила крыла и фюзеляжа (самолета без ГО - горизонтального оперения) приложена в центре давления, который может быть расположен впереди фокуса или позади него. Если этот центр давления не совпадает с центром тяжести, то подъемная сила самолета без ГО 4 создает момент, который уравновешивается подъемной силой ГО 5. Вектор скорости 7 занимает при этом некоторое постоянное положение. Если теперь летчик ступенчато, резко, отклонит ручку управления на себя, то на стабилизаторе создастся приращение подъемной силы ГО 6, направленное вниз. Это приращение подъемной силы ГО вызовет в первоначальный момент просадку самолета и создаст кабрирующий момент, который приведет к увеличению угла атаки. При увеличении угла атаки возникнет приращение подъемной силы, приложенное в фокусе самолета. (Козлов С.Г., Курицкес Я.М., Пышнов B.C. Практическая аэродинамика. Издание IV, переработанное, Москва, Ленинград. НКОП СССР. 1939, с.315÷318, 320÷322). В итоге переходного процесса самолет будет сбалансирован на новом угле атаки и его вектор скорости займет новое установившееся положение 8. Заявленный прогноз вектора скорости полета представляет собой разницу между первоначальным и новым установившимися положениями вектора скорости при ступенчатом отклонении ручки управления (штурвала) 9.
Прогноз по тангажу в функции перегрузки и отклонения ручки управления.
Δα - дополнительное отклонение метки вектора скорости в продольном канале,
 - отклонение ручки управления по тангажу от среднего положения,
- отклонение ручки управления по тангажу от среднего положения,
xв - мгновенное положение ручки управления по тангажу,
 - среднее положение ручки управления по тангажу, определенное методом «скользящего среднего» за время, примерно соответствующее времени срабатывания (2÷4 с),
- среднее положение ручки управления по тангажу, определенное методом «скользящего среднего» за время, примерно соответствующее времени срабатывания (2÷4 с),
 - коэффициент эффективности продольного управления (приращение перегрузки на единицу отклонения ручки управления).
- коэффициент эффективности продольного управления (приращение перегрузки на единицу отклонения ручки управления).
V - истинная скорость полета,
k - масштабный коэффициент.
Прогноз вектора скорости по крену и рысканию формируют аналогичным образом.
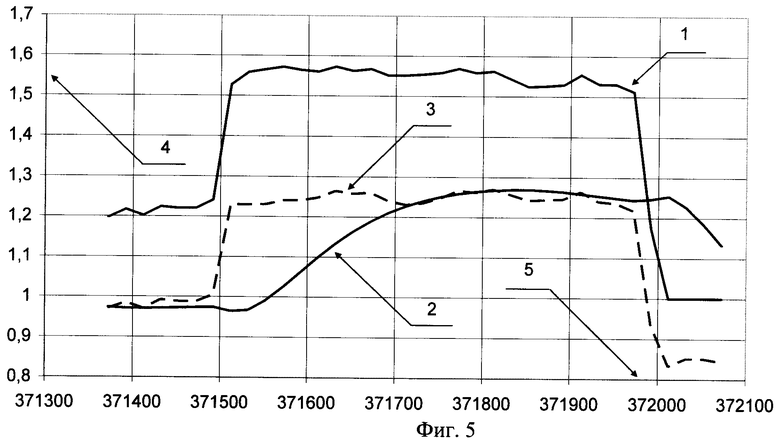
Показанные для примера на фиг.2-4 режимы выполнены на пилотажном стенде при боковом ветре до 15 м/с, угле наклона глиссады -5° и имитации видимости =100 м. Для управления по курсу и глиссаде использовался «Способ управления самолетом при заходе на посадку» (патент RU №2267747).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ С УЧЕТОМ СТАБИЛИЗАЦИИ ЗАДАННОЙ СКОРОСТИ ПОЛЕТА | 2010 |
|
RU2455201C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2243133C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
Изобретение относится к способу формирования прогноза вектора скорости полета. Способ заключается в том, что автоматически и с повторением определяют поступающую на индикацию величину подлежащего индикации вектора скорости, определяют величину производной по времени вектора скорости, вычисляют величину производной управляемого вектора скорости, вычисляют сумму измеренной и отфильтрованной величины вектора скорости и величину производной управляемого вектора скорости, формируют упомянутую поступающую на индикацию величину. Дополнительно измеряют отклонения рычагов управления от их среднего положения. Среднее положение определяют методом «скользящего среднего» за время, соответствующее времени срабатывания. Определяют прогнозное положение метки вектора скорости полета. Прогнозное положение метки вектора скорости полета суммируют с полученным ранее положением метки вектора скорости. Представляют на экране вывода символ вектора скорости. Технический результат заключается в увеличении точности стабилизации заданной траектории при ручном управлении самолетом. 5 ил.
Способ формирования прогноза метки вектора скорости полета, заключающийся в том, что автоматически и с повторением определяют поступающую на индикацию величину подлежащего индикации вектора скорости, зависящую от измеренной и отфильтрованной величин вектора скорости, при этом определяют также величину производной по времени вектора скорости, который управляется пилотом данного летательного аппарата, вычисляют величину производной управляемого вектора скорости и вычисляют сумму измеренной и отфильтрованной величин вектора скорости и величину производной управляемого вектора скорости, формируют упомянутую поступающую на индикацию величину, отличающийся тем, что дополнительно измеряют отклонения рычагов управления от их среднего положения, определяемого методом «скользящего среднего» за время, соответствующее времени срабатывания, и определяют прогнозное положение метки вектора скорости полета, которое суммируют с полученным ранее положением метки вектора скорости, и представляют на экране вывода характерный символ, иллюстрирующий вектор скорости.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2243133C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2192015C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| РАСШИРЯЮЩИЙСЯ ЦЕМЕНТ | 0 |
|
SU366164A1 |

