Область техники
Изобретение относится к области авиации, более конкретно, к приборному оборудованию, и может быть использовано при стабилизации заданной скорости полета для повышения качества переходных процессов и упрощения управления летательным аппаратом.
Уровень техники
Существуют два способа стабилизации заданной скорости полета: через руль высоты при постоянной тяге двигателей и способ стабилизации заданной скорости полета путем изменения тяги двигателей при постоянном угле наклона траектории и постоянном углу крена. В данном случае рассматривается способ стабилизации заданной скорости полета путем изменения тяги двигателей.
Известно, что для стабилизации заданной скорости полета используются специальные индексы заданных значений, располагающиеся на шкалах указателей скорости. Стабилизацию скорости при этом осуществляют путем совмещения указателя (стрелки) скорости с индексом заданного значения.
Недостаток указанного выше способа стабилизации заданной скорости полета заключается в том, что летчик вынужден вручную, методом проб и ошибок, подбирать необходимый режим работы двигателей. Количество управляющих движений РУД (рычагами управления двигателями) значительно увеличивается в случае полета на втором режиме, что усложняет технику пилотирования, увеличивает загрузку летчика, чем уменьшается безопасность полета, особенно в условиях полета по приборам.
Известен способ пилотирования летательного аппарата по задаваемой траектории с задаваемой скоростью (Патент RU 2129699, B64D 43/00, опубл. 27.04.1999), заключающийся в том, что задают траекторию, определяют положение и параметры движения летательного аппарата в пространстве для формирования на экране электронного индикатора подвижного индекса, совмещаемого летчиком посредством отклонения рычагов управления с задаваемой точкой на экране, при этом представляют подвижный индекс в виде треугольника, изображающего летательный аппарат при виде на него сзади вдоль вектора скорости и начинающегося от него вектора изменяемой длины, на конце которого расположена окружность изменяемого диаметра, причем ограничение на длину вектора изображается отрезком, изображают задаваемую траекторию полета в виде линии в пространстве, соединенной вертикальными отрезками со своей проекцией на горизонтальную плоскость, при этом задаваемую точку экрана изображают в виде креста, движущегося по задаваемой траектории, совмещают подвижный индекс с задаваемой точкой экрана посредством окаймления креста окружностью вектора, при этом при снятии усилия с ручки управления обеспечивают движение летательного аппарата в направлении, указанном концом вектора. Особенностями данного способа по сравнению с описанным выше являются замена стрелки и индекса, которые индицируют фактическое и заданное значения соответственно, на крест и окружность, размер которых символизирует фактическое и заданное значения, а также переменное значение «задаваемой скорости полета». При постоянной скорости захода на посадку этот способ обладает недостатками, указанными выше.
При постоянной скорости этот способ обладает недостатками, указанными выше.
Применяющиеся на самолетах автоматы тяги (AT) решают задачу стабилизации заданной скорости полета [Белогородский С.Л. «Автоматизация управления посадкой самолета». Москва. «Транспорт», 1972, 352 с. Стр.202-216].
Недостатки автоматов тяги (AT) заключаются в сложности конструкции, большом весе и сложности обеспечения необходимой надежности. В частности, необходимо обеспечить перемещение РУД при работе AT по эргономическим соображениям: летчик должен иметь возможность контролировать работу AT по перемещениям РУД. Более того, частое использование автоматики приводит к частичной потере летчиком навыков ручного управления, что снижает надежность системы в целом.
Сущность изобретения
Задачей изобретения является создание такого способа ручной стабилизации заданной скорости полета, который обеспечивал бы повышение качества переходных процессов и упрощение ручного управления летательным аппаратом.
Поставленная задача решается за счет того, что для стабилизации заданной скорости полета определяют заданную скорость полета, измеряют обороты двигателей, продольную перегрузку, угол наклона траектории и фактическую скорость полета, затем по разности между заданной и фактической скоростями полета, разности между продольной перегрузкой и коэффициентом, учитывающим компенсацию ускорения свободного падения, численно равным синусу угла наклона траектории, определяют расчетные обороты двигателей для заданной скорости, вычисляют необходимое изменение оборотов каждого двигателя, для чего дополнительно измеряют величину отклонения рычагов управления двигателями от их среднего положения, определяемого методом «скользящего среднего» за время, приблизительно соответствующее сумме времени изменения оборотов и времени задержки изменения (времени «срабатывания») оборотов при перемещении РУД, формируют сигнал рассогласования между расчетными оборотами и фактическими оборотами каждого двигателя, который индицируют в виде метки избытка оборотов, перемещающейся относительно метки отсчета, стабилизацию заданной скорости полета осуществляют, удерживая метку избытка оборотов у метки отсчета путем перемещения РУД.
Кроме того, отклонение метки избытка оборотов (которая показывает рекомендацию летчику по перемещению РУД для управления тягой двигателей) индицируют относительно метки вектора скорости.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в повышении качества переходных процессов и упрощении ручного управления летательным аппаратом.
Достижение технического результата обусловлено управлением самолетом с учетом стабилизации скорости полета за счет использования вычисленного прогнозного значения перемещения РУД до необходимого положения, что обеспечивает «безынерционность» изменения скорости до заданной, т.е. ее стабилизацию при заданном значении.
Благодаря этим признакам обеспечивается повышение качества переходных процессов, что исключает необходимость «вручную» подбирать необходимый режим работы двигателей.
Заявленный способ ручной стабилизации заданной скорости полета иллюстрируется чертежами, представленным на фиг.1-3.
На фиг.1 показан пример изменения оборотов двигателя при перемещении РУД.
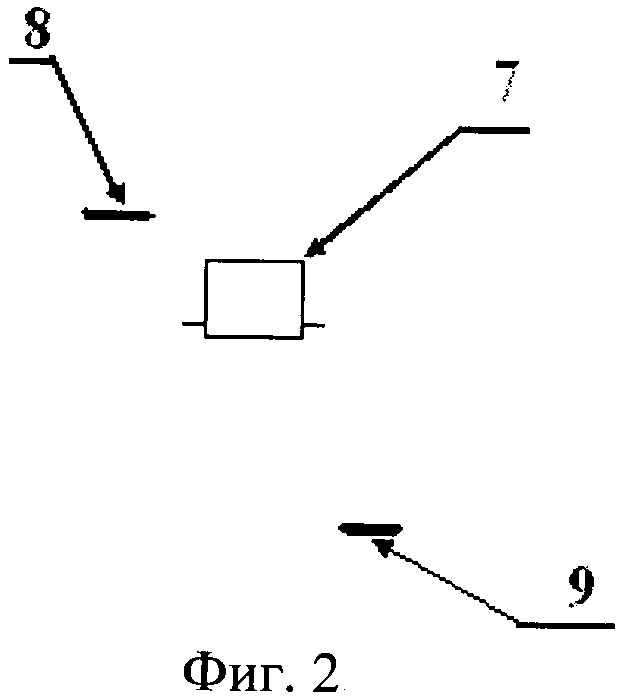
На фиг.2 показан пример индикации разницы между прогнозируемыми и расчетными оборотами относительно метки вектора скорости.
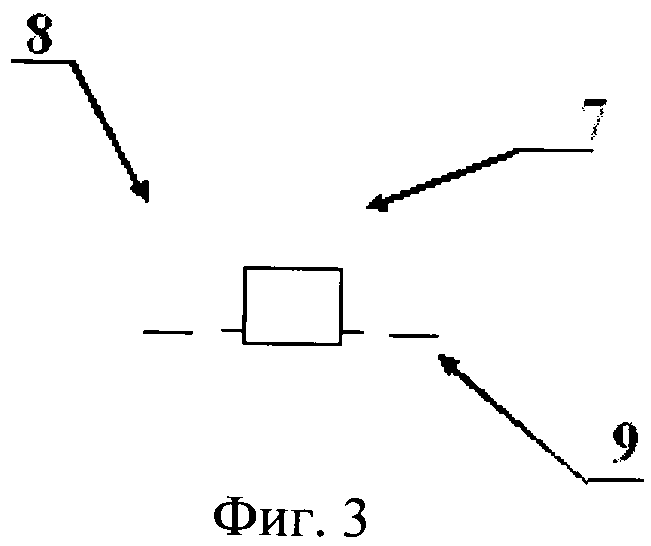
На фиг.3 показан пример индикации при совпадении прогнозируемых и расчетных оборотов. На фигурах обозначено:
1. Положение РУД.
2. Фактические обороты двигателя.
3. Прогнозируемые обороты двигателя.
4. Момент (время) начала перемещения РУД.
5. Момент (время) начала изменения фактических оборотов двигателя.
6. Момент (время) окончания переходного процесса.
7. Метка вектора скорости.
8. Метка избытка оборотов первого двигателя.
9. Метка избытка оборотов второго двигателя.
Сведения, подтверждающие возможность осуществления изобретения
Способ стабилизации заданной скорости полета при ручном управлении осуществляется следующим образом.
На первом этапе определяют расчетные (для заданной скорости) обороты двигателей.
Расчетные обороты Nрасч одинаковы для всех двигателей.

где

n - количество двигателей.
nx - продольная перегрузка в скоростной системе координат.
θ - текущий угол наклона траектории [град.].

Vпр - приборная скорость полета, м/с.
Vрасч - заданная (расчетная) скорость захода на посадку, м/с.
Расчетную скорость можно определить через вес или угол атаки.
 зависит от тяговооруженности самолета.
зависит от тяговооруженности самолета.
Показывает, на какую величину нужно изменить обороты двигателя для изменения продольной перегрузки (в скоростной системе координат) на единицу.
 также зависит от тяговооруженности самолета и показывает, на какую величину нужно изменить обороты двигателя для изменения скорости на 1 м/с. При этом правильнее говорить о влиянии тяги (оборотов) на продольное ускорение. В этом случае в формулу [2] нужно ввести еще один сомножитель: Δt. В данном расчете этот сомножитель входит в неявном виде в коэффициент kV.
также зависит от тяговооруженности самолета и показывает, на какую величину нужно изменить обороты двигателя для изменения скорости на 1 м/с. При этом правильнее говорить о влиянии тяги (оборотов) на продольное ускорение. В этом случае в формулу [2] нужно ввести еще один сомножитель: Δt. В данном расчете этот сомножитель входит в неявном виде в коэффициент kV.
Формула [2] показывает, какие нужно установить обороты двигателей для того, чтобы устранить рассогласование между фактической и расчетной скоростями полета. В этой формуле продольное ускорение учитывается выражением:

Из приведенного ниже выражения [5] ясно, что положительная продольная перегрузка может быть использована либо для увеличения скорости, либо, при равенстве nx синусу угла наклона траектории, для набора высоты при постоянной истинной скорости полета. В частном случае отклонение фактической скорости полета от расчетной может быть скомпенсировано продольной перегрузкой. В этом случае Nрасч=Nср, т.е. изменение оборотов не требуется.
Далее определяют прогнозируемые, в зависимости от положения рычага, обороты двигателей.
Смысл этого прогноза заключается в следующем.
На перемещение рычага управления двигателем (далее - РУД) двигатель в силу «инерционности» системы реагирует не сразу. В первый момент обороты двигателя вообще не изменяются (см. фиг.1). Затем двигатель «разгоняется» и через другой промежуток времени выходит на новые установившиеся обороты.
Время от начала перемещения РУД (поз.4) до начала изменения фактических оборотов двигателя (поз.5) называется временем задержки.
Время от начала изменения фактических оборотов двигателя (поз.5) до окончания переходного процесса (поз.6) называется временем разгона.
Время от начала перемещения РУД (поз.4) до окончания переходного процесса (поз.6) называется временем приемистости.
Эти промежутки времени индивидуальны для каждого типа двигателя и составляют примерно 0.25 - время задержки и 1-3 сек - время приемистости. Поэтому нужный режим работы (обороты двигателя) летчик подбирает методом «проб и ошибок», что требует от него значительного отвлечения внимания. Предлагаемый «прогноз оборотов» устраняет всякое запаздывание движения метки прогнозируемых оборотов после отклонения РУД, поскольку при неподвижном РУДе фактические обороты точно совпадают с оборотами, определенными методом «скользящего среднего». При резком ступенчатом отклонении РУД метка прогнозируемых оборотов перемещается с темпом отклонения РУД в новое положение. Через указанное выше время фактические обороты «догоняют» метку прогнозируемых оборотов (индицировать фактические обороты нет необходимости). Отсутствие запаздывания в перемещении метки в ответ на перемещение РУД практически исключает двойные движения, характерные для метода «проб и ошибок», ускоряет процесс установления расчетных оборотов двигателя, чем уменьшает рабочую загрузку летчика, т.е. упрощает технику пилотирования.
Прогнозируемые обороты определяют для каждого двигателя в отдельности.

Ni - обороты соответствующего двигателя.
 - отклонение рычага управления двигателем (РУД) от среднего положения.
- отклонение рычага управления двигателем (РУД) от среднего положения.
αРУД_i - мгновенное положение РУДа.
 - среднее положение РУД-а, определенное методом «скользящего среднего» за время = 0,8 сек с задержкой от реального времени τ=0.25 сек.
- среднее положение РУД-а, определенное методом «скользящего среднего» за время = 0,8 сек с задержкой от реального времени τ=0.25 сек.
 - коэффициент эффективности РУДа (На 1° хода РУДа ~1% оборотов двигателя).
- коэффициент эффективности РУДа (На 1° хода РУДа ~1% оборотов двигателя).
Индикацию осуществляют следующим образом.
1. Индицируют расчетные и прогнозируемые обороты двигателей.
1a. Если прогнозируемые обороты не определяют и не индицируют, то индицируют фактические обороты двигателей.
2. Индицируют разницу между расчетными и прогнозируемыми оборотами двигателей.

где
ΔNi - избыточное значение оборотов.
При этом в качестве нуля (индекса) отсчета можно использовать любой подходящий символ из имеющихся на индикации.
Возможна индикация указанных параметров в виде счетчиков. Этот способ неудобен для летчика, поскольку требует вычислений в уме. Может применяться для отладки (уточнения коэффициентов в уравнениях).
Предпочтительна индикация указанных параметров в виде стрелок или меток.
При индикации в качестве нуля (индекса) отсчета также удобно использовать метку вектора скорости.
Управление самолетом производится так. Стабилизацию заданной скорости полета осуществляют, удерживая метку избытка оборотов у метки отсчета путем перемещения РУД. При этом избыток оборотов индицируют более высоким положением метки избытка оборотов относительно метки отсчета (ΔNлев на фиг.2), недостаток оборотов индицируют более низким положением метки избытка оборотов относительно метки отсчета (ΔNправ на фиг.2). В случае, показанном на фиг.2, левый РУД нужно прибрать, а правый - добавить для того, чтобы обе метки были на одной высоте с меткой вектора скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЁТА САМОЛЁТА С УЧЕТОМ СТАБИЛИЗАЦИИ СКОРОСТИ | 2018 |
|
RU2689054C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СНИЖЕНИЯ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2002 |
|
RU2280888C2 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ | 2002 |
|
RU2242800C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ЗАХОДА НА ПОСАДКУ | 2008 |
|
RU2364943C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
Изобретение относится к приборному оборудованию в области авиации. В способе управления самолетом с учетом стабилизации заданной скорости определяют заданную скорость полета, измеряют обороты двигателей, продольную перегрузку, угол наклона траектории, скорость полета. По разности между заданной и фактической скоростями полета, разности между продольной перегрузкой и синусом угла наклона траектории определяют расчетные обороты двигателей для заданной скорости. Определяют изменения оборотов каждого двигателя, для чего измеряют величину отклонения рычагов управления двигателями от их среднего положения, определяемого методом «скользящего среднего» за время, соответствующее времени изменения оборотов с задержкой, соответствующей времени задержки изменения оборотов при перемещении рычага управления двигателем. Формируют сигнал рассогласования между расчетными оборотами и фактическими оборотами каждого двигателя, который индицируют в виде метки избытка оборотов, перемещающейся относительно метки отсчета. Стабилизацию заданной скорости полета осуществляют, перемещая или удерживая рычаг управления двигателем так, чтобы метка избытка оборотов располагалась у метки отсчета. Достигается повышение качества переходных процессов и упрощение ручного управления летательным аппаратом. 1 з.п. ф-лы, 3 ил.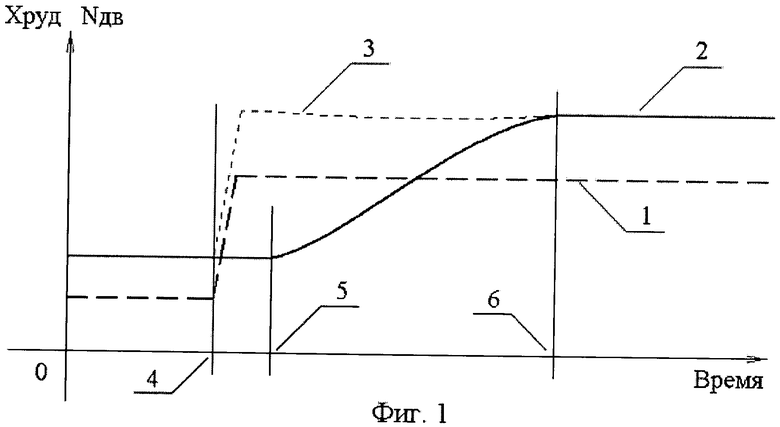
1. Способ стабилизации заданной скорости полета, включающий определение заданной скорости полета, измерение оборотов двигателей, продольной перегрузки, угла наклона траектории, скорости полета, отличающийся тем, что по разности между заданной и фактической скоростями полета, разности между продольной перегрузкой и синусом угла наклона траектории определяют расчетные обороты двигателей для заданной скорости, определяют изменения оборотов каждого двигателя, для чего измеряют величину отклонения рычагов управления двигателями от их среднего положения, определяемого методом «скользящего среднего» за время, соответствующее времени изменения оборотов с задержкой, соответствующей времени задержки изменения оборотов при перемещении рычага управления двигателем, формируют сигнал рассогласования между расчетными оборотами и фактическими оборотами каждого двигателя, который индицируют в виде метки избытка оборотов, перемещающейся относительно метки отсчета, стабилизацию заданной скорости полета осуществляют перемещая или удерживая рычаг управления двигателем так, чтобы метка избытка оборотов располагалась у метки отсчета.
2. Способ по п.1, отличающийся тем, что отклонение метки избытка оборотов индицируют относительно метки вектора скорости.
| СПОСОБ ПИЛОТИРОВАНИЯ ЛА ПО ЗАДАВАЕМОЙ ТРАЕКТОРИИ С ЗАДАВАЕМОЙ СКОРОСТЬЮ | 1997 |
|
RU2129699C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2241642C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2243133C2 |
| Белогодский С.Л | |||
| Автоматизация управления посадкой самолета | |||
| - М.: ТРАНСПОРТ, 1972, с.202-116 | |||
| Способ контроля качества адгезии пленок | 1986 |
|
SU1374101A1 |
| US 5886649 А, 23.03.1999. | |||

