Изобретение относится к способу и устройству для индикации вектора скорости летательного аппарата.
Известно, что индикация вектора скорости, который предназначен для указания той точки пространства, в направлении которой движется данный летательный аппарат (однако без того, чтобы этот вектор являлся репрезентативным для амплитуды этой скорости), может быть реализована, в частности на экране визуализации на приборной доске пилотов летательного аппарата или на коллиматорном индикаторе типа HUD ("Head Up Display"), то есть на так называемом индикаторе на лобовом стекле.
В том случае, когда летательный аппарат, снабженный такой системой индикации, пересекает зону атмосферной турбулентности, положение вектора скорости на экране визуализации подвергается возмущениям. Кроме того, в том случае, когда данный летательный аппарат осуществляет сбрасывание груза или выпуск шасси, его траектория очень быстро изменяется, что влечет за собой изменение положения индицируемого вектора скорости. Однако в этих случаях по истечении достаточно короткого времени летательный аппарат вновь возвращается на свою исходную траекторию.
В том случае, когда пилот фиксирует такое изменение положения вектора скорости на экране визуализации, он делает попытку воздействовать на ручку управления для повторного выведения летательного аппарата на его исходную траекторию. Поскольку рассматриваемые возмущения (турбулентность атмосферы, сбрасывание груза или выпуск шасси и т.п.) имеют ограниченное во времени воздействие на траекторию полета летательного аппарата, такое действие пилота имеет следствием продолжительную модификацию этой траектории, то есть результирующий эффект, противоположный ожидаемому. В этом случае пилот должен осуществить повторное воздействие на ручку управления, имеющее направление, противоположное направлению его первого воздействия, для возврата летательного аппарата на его исходную траекторию. В некоторых ситуациях, в частности в процессе преодоления зоны атмосферной турбулентности, это повторное воздействие может повлечь за собой слишком значительную коррекцию траектории. При этом оказываются необходимыми и другие воздействия на ручку управления для обеспечения стабилизации летательного аппарата на желаемой траектории.
Разумеется, такое явление, которое может быть уподоблено "управляемым колебаниям", должно быть исключено, поскольку оно может повлечь за собой, в частности, ускоренную усталость конструкции летательного аппарата, а также завладевает вниманием пилота в тех фазах полета, где это внимание может оказаться необходимым для выполнения других действий.
Известное техническое решение, позволяющее устранить эту проблему, состоит в фильтрации сигнала индикации вектора скорости посредством фильтра пропускания низких частот, имеющего постоянную времени, величина которой заключена в диапазоне от нескольких десятых долей секунды до нескольких секунд. Это позволяет устранить описанное выше явление, однако следствием использования подобного технического решения является возникновение новой проблемы: в том случае, когда пилот хочет изменить траекторию полета летательного аппарата, воздействуя на ручку управления, этот фильтр пропускания низких частот создает определенную задержку между фактическим изменением траектории, являющимся следствием воздействия на ручку управления, и изменением индикации вектора скорости на экране устройства визуализации. Этот недостаток быстроты реакции мешает реальной оценке пилотом результата его воздействия на ручку управления, что делает весьма затруднительным правильное осуществление такого воздействия. Действительно, если пилот, например, воздействует на ручку управления слишком долго, летательный аппарат может выйти за пределы желаемой траектории, что может снова привести к "управляемым колебаниям", как об этом уже было сказано выше.
В то же время, в патентном документе ЕР-0366164 предлагается другое техническое решение, которое состоит в индикации либо вектора скорости, соответствующего управляющим воздействиям пилота (управляемый вектор скорости), либо фактически измеренного вектора скорости. Устройство коммутации позволяет индицировать либо один, либо другой из этих векторов скорости. В так называемых "нормальных" условиях полета, соответствующих предварительно определенным диапазонам скоростей, углов атаки, коэффициента перегрузки и т.п., индицируется управляемый вектор скорости. Зато в том случае, когда данный летательный аппарат выходит за пределы этих "нормальных" условий полета, индицируется фактически измеренный вектор скорости. В процессе коммутации между индикацией двух этих векторов скорости применяется специальная фильтрация для сохранения плавности перехода от индикации одного вектора скорости к индикации другого.
Однако и это известное техническое решение обладает определенными недостатками. В частности, два этих различных отображения индицируются с использованием одного и того же символа, что требует применения специальной логики переключения между двумя отображениями, что в некоторых случаях может повлечь за собой проблемы перехода из одного состояния в другое, проблемы выбора оптимального шага между индикацией одного и другого отображения и т.д.
Техническая задача предлагаемого изобретения состоит в создании способа индикации вектора скорости летательного аппарата, устраняющего отмеченные выше недостатки. Этот способ индикации вектора скорости летательного аппарата позволяет сформировать индикацию
- которая остается стабильной даже в случае мгновенных возмущений траектории данного летательного аппарата, возникающих, например, вследствие атмосферной турбулентности или сброса находящихся на борту грузов или выпуска шасси,
- которая представляет повышенную скорость реакции в процессе изменений траектории, возникающих вследствие по меньшей мере одного воздействия пилота на рычаг или ручку управления данным летательным аппаратом.
Для решения этой задачи и в соответствии с предлагаемым изобретением используется способ, в котором
- автоматически и воспроизводимым образом определяют отображаемое значение, представляющее величину подлежащего индикации вектора скорости и зависящую от некоторого первого слагаемого, которое содержит измеренную и отфильтрованную величину вектора скорости,
- представляют на экране визуализации характеристический символ, иллюстрирующий этот вектор скорости, положение которого на этом экране визуализации является репрезентативным для данного подлежащего индикации значения, причем этот способ отличается тем, что для определения этого подлежащего индикации значения,
- определяют величину производной по времени того вектора скорости, который по существу управляется пилотом данного летательного аппарата,
- рассчитывают второе слагаемое на основе величины упомянутой производной управляемого вектора скорости,
- рассчитывают сумму выше первого и второго слагаемых таким образом, чтобы сформировать величину, подлежащую индикации.
Таким образом, при использовании предлагаемого изобретения можно устранить отмеченные выше недостатки.
Действительно
- упомянутое выше первое слагаемое, которое учитывает отфильтрованную (действительную) величину измеренного вектора скорости, позволяет получить устойчивую индикацию вектора скорости, даже в случае мгновенных возмущений траектории,
- упомянутое выше второе слагаемое, которое учитывает производную управляемого вектора скорости, гарантирует надлежащую и достаточно высокую скорость реакции индикации вектора скорости в процессе изменений траектории, связанных с управляющими воздействиями пилота, в частности его воздействиями на ручку управления летательного аппарата.
Кроме того, благодаря непрерывному учету (посредством суммирования) двух этих слагаемых, то есть измеренного вектора скорости и управляемого вектора скорости, отпадает необходимость в использовании каких-либо логических алгоритмов перехода индикации в отличие от технического решения, предложенного в упомянутом выше патентном документе ЕР-0366164.
Предпочтительным образом вычисляют
- первое слагаемое γ1, получаемое на основе следующего выражения:
γ1=[1/(1+τ1·s)]·γmes,
в котором
* s представляет собой преобразование Лапласа;
* τ1 представляет собой предварительно определенную постоянную времени;
* γmes представляет собой измеренный вектор скорости;
- и упомянутое второе слагаемое γ2, получаемое на основе следующего выражения:
γ2=[τ2/(1+τ3.s) ].γderivee,
в котором
* s представляет собой преобразование Лапласа;
* τ2 и τ3 представляют собой предварительно определенные постоянные времени;
* γderivee представляет собой производную вектора скорости, управляемого пилотом.
В соответствии с предлагаемым изобретением постоянные времени τ1, τ2 и τ3 могут быть определены в функции различных параметров, в частности в функции массы данного летательного аппарата. Разумеется, эти постоянные времени могут отличаться друг от друга. Однако в упрощенном варианте реализации все эти постоянные времени τ1, τ2 и τ3 являются равными друг другу.
В то же время, предпочтительным образом для определения составляющей индицируемой величины вдоль одного (первого) вертикального направления производная управляемого вектора скорости определяется с учетом одного из следующих сигналов:
- сигнал коэффициента перегрузки летательного аппарата;
- сигнал угла наклона траектории летательного аппарата;
- сигнал производной угла наклона траектории летательного аппарата.
Принимая во внимание сигнал коэффициента перегрузки летательного аппарата, предпочтительным образом вычисляют производную γderivee управляемого вектора скорости γсоm на основе управляемого изменения ΔNzpil коэффициента перегрузки с использованием следующего выражения:
γderivee=(g/V). ΔNzpil,
в котором
- g представляет собой ускорение силы тяжести;
- V представляет собой скорость летательного аппарата.
В то же время, предпочтительным образом для определения составляющей индицируемой величины вдоль второго направления, которое является боковым направлением данного летательного аппарата и располагается под прямым углом по отношению к вертикальному направлению, производная управляемого вектора скорости определяется на основе сигнала угловой скорости крена (то есть угловой скорости вращения относительно оси крена) данного летательного аппарата.
Предлагаемое изобретение касается также устройства, предназначенного для индикации вектора скорости летательного аппарата и осуществления упомянутого выше способа.
В соответствии с предлагаемым изобретением такое устройство имеет в своем составе:
- первое средство, предназначенное для измерения действительной величины вектора скорости летательного аппарата;
- вычислительный блок, предназначенный для определения автоматически и воспроизводимым образом значения, поступающего на индикацию и представляющего величину подлежащего индикации вектора скорости, причем этот вычислительный блок содержит средство фильтрации, обеспечивающее фильтрацию величины, измеренной при помощи первого средства, таким образом, чтобы сформировать первое слагаемое;
- блок индикации, предназначенный для представления на экране визуализации характеристического символа, иллюстрирующего этот вектор скорости, положение которого на экране визуализации является репрезентативным для упомянутого значения индикации.
Это устройство в соответствии с предлагаемым изобретением отличается тем, что оно дополнительно имеет в своем составе второе средство, предназначенное для определения производной по времени вектора скорости управляемого пилотом данного летательного аппарата, а также тем, что упомянутый вычислительный блок дополнительно содержит
- вычислительное средство, которое определяет второе слагаемое на основе производной управляемого вектора скорости;
- сумматор, который осуществляет сложение упомянутых выше первого и второго слагаемых таким образом, чтобы сформировать индицируемый вектор скорости.
Кроме того, предлагаемое изобретение касается также летательного аппарата, в частности гражданского транспортного самолета, имеющего на борту упомянутое выше устройство.
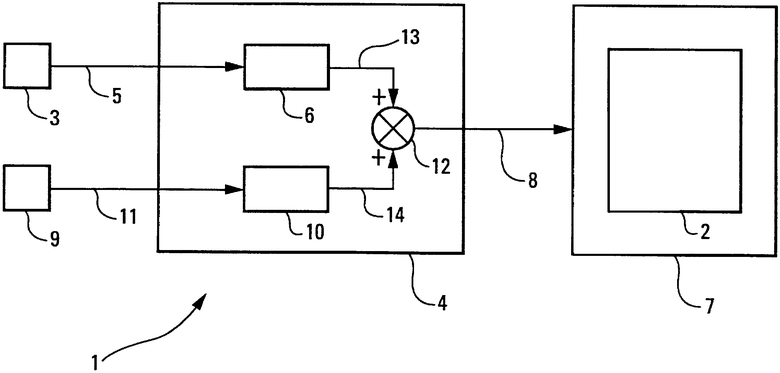
Способ поясняется чертежом, на котором представлена блок-схема устройства в соответствии с предлагаемым изобретением.
Устройство 1 в соответствии с предлагаемым изобретением, схематически представленное на чертеже, установлено на борту летательного аппарата, например на борту транспортного самолета, не показанного на чертеже, и предназначено для индикации вектора скорости этого летательного аппарата на экране визуализации 2, представляющего собой, например, экран визуализации на приборной доске или коллиматорный индикатор или индикатор на лобовом стекле типа HUD (Head Up Display").
Это устройство 1 обычно имеет в своем составе:
- средство 3 обычного типа, предназначенное для измерения действительного значения вектора скорости данного летательного аппарата;
- вычислительный блок 4, предназначенный для определения автоматически и повторяющимся образом значения индикации γaff, представляющего величину подлежащего индикации вектора скорости. Этот вычислительный блок 4 связан при помощи линии соединения 5 со средством 3 и содержит средство фильтрации 6, о котором более подробно будет сказано ниже и которое обеспечивает фильтрацию значения, измеренного средством 3, таким образом, чтобы сформировать первое слагаемое γ1;
- блок индикации 7, соединенный посредством соединительной линии 8 с вычислительным блоком 4, который содержит экран визуализации 2 и который предназначен для представления на этом экране визуализации 2 характеристического символа, иллюстрирующего вектор скорости, положение которого на этом экране визуализации 2 является репрезентативным для упомянутого выше значения индикации γaff.
В рамках предлагаемого изобретения фильтрация измеренного вектора скорости касается действия, которое состоит в фильтрации величины измеренного вектора скорости посредством фильтра пропускания низкой частоты (имеющего постоянную времени, величина которой, например, заключена в диапазоне от нескольких десятых долей секунды до нескольких секунд) для того чтобы сделать эту величину нечувствительной к быстрым возмущениям (продолжительность которых составляет несколько секунд или примерно 3-4 секунды) траектории полета данного летательного аппарата.
В соответствии с предлагаемым изобретением устройство 1 дополнительно содержит средство 9 обычного типа, предназначенное для определения производной по времени вектора скорости (управляемого), который управляется пилотом данного летательного аппарата, и вычислительный блок 4 дополнительно содержит
- вычислительное средство 10, соединенное при помощи соединительной линии 11 со средством 9 и которое определяет второе слагаемое γ2 на основе производной управляемого вектора скорости;
- сумматор 12, который соединен при помощи соединительных линий 13 и 14 соответственно со средством фильтрации 6 и с вычислительным средством 10 и который обеспечивает суммирование первого и второго слагаемых таким образом, чтобы сформировать значение индикации γaff.
Таким образом, благодаря применению предлагаемого изобретения значение индикации γaff, которое используется для реализации индикации, содержит первое и второе слагаемые γ1 и γ2, являющиеся такими, что
- первое слагаемое γ1, учитывающее отфильтрованную величину действительного измеренного вектора скорости, позволяет обеспечить устойчивую индикацию вектора скорости даже в случае быстрых возмущений траектории, как об этом уже было сказано выше, и одновременно
- второе слагаемое γ2, учитывающее производную управляемого вектора скорости, гарантирующую приемлемую и достаточно высокую реакционную способность индикации вектора скорости в процессе изменений траектории полета, связанных с воздействиями пилота, в частности на ручку управления, и это несмотря на упомянутую фильтрацию, которая предусмотрена в соответствии с предлагаемым изобретением (но которая ограничена лишь первым слагаемым γ1).
Кроме того, благодаря постоянному учету (посредством сумматора 12) двух этих слагаемых γ1 и γ2, то есть учету измеренного вектора скорости и управляемого вектора скорости, отсутствует необходимость в использовании каких бы то ни было логических устройств обеспечения перехода в отличие, например, от технического решения, предложенного в патентном документе ЕР-0366164.
В соответствии с предпочтительным вариантом реализации средство 6 обеспечивает вычисление первого слагаемого γ1 на основе следующего выражения:
γ1=[1/(1+τ1.s)].γmes,
в котором
- s представляет собой преобразование Лапласа;
- τ1 представляет собой предварительно определенную постоянную времени;
- γmes представляет собой измеренный вектор скорости.
Кроме того, предпочтительно средство 10 обеспечивает вычисление второго слагаемого γ2 на основе следующего выражения:
γ2=[τ2/(1+τ3. s) ].γderivee,
в котором
- s представляет собой преобразование Лапласа;
- τ2 и τ3 представляют собой предварительно определенные постоянные времени;
- γderivee представляет собой производную вектора скорости γсоm, который управляется пилотом.
В этом случае подаваемое на индикацию значение γaff, которое передается из вычислительного блока 4 в блок индикации 7 и которое формируется как сумма первого и второго слагаемых γ1 и γ2, может быть записано в виде
γaff=[1/(1+τ1.s)].γmes+[τ2/(1+τ3.s)].γderivee.
В соответствии с предлагаемым изобретением постоянные времени τ1, τ2 и τ3 могут быть определены в функции различных параметров, в частности в функции массы данного летательного аппарата. Эти постоянные времени могут отличаться друг от друга. Однако в упрощенном варианте реализации все эти постоянные времени τ1, τ2 и τ3 рассматриваются в качестве равных друг другу.
Следует отметить, что удовлетворительные результаты могут быть получены, в частности при использовании постоянной времени фильтрации τ1, по существу равной 0,6 секунд, и постоянных времени τ2 и τ3, по существу равных 2 секундам, в случае тяжелого самолета или самолета средних размеров, например транспортного самолета.
В то же время, величина γderivee определяется в функции заданных значений (или сигналов), вводимых пилотом, в частности посредством обычной ручки управления летательного аппарата. В зависимости от рассматриваемой в данном случае оси эти заданные значения могут быть выражены в различных единицах. Так, в качестве не являющегося ограничительным примера, вдоль вертикальной оси z системы координат, связанной с данным летательным аппаратом (вертикальный градиент летательного аппарата), эти заданные значения могут быть введены в виде коэффициента перегрузки Nz, в виде производной угла наклона траектории, в виде собственно угла наклона траектории и т.д. В том случае, когда заданное значение по этой оси z выражено в виде производной угла наклона траектории, величина γderivee равна этому заданному значению. В том случае, когда она выражена в виде угла наклона траектории, величина γderivee равна производной от этого заданного значения.
В тех случаях, когда это заданное значение выражено в других единицах, его следует преобразовать соответствующим образом. Так, например, в случае, когда заданное значение соответствует коэффициенту перегрузки, можно преобразовать его так, как будет указано ниже.
Известно, что производная γ' вектора скорости по существу равна следующей величине:
γ'≈(g/V)·ΔNz,
где ΔNz представляет собой изменение коэффициента перегрузки Nz, g представляет собой ускорение силы тяжести и V представляет собой скорость данного летательного аппарата.
Из этого выводится следующее выражение:
γderivee≈(g/V)·ΔNzpil,
в котором ΔNzpil представляет собой изменение коэффициента перегрузки, которое задается пилотом и которое соответствует перемещению ручки (или соответствующего рычага) управления.
В этом предпочтительном способе реализации для оси z, таким образом, получают
* γaff=[1/(1+τ1·s)].γmes+[τ2/(1+τ3·s)·(g/V)·ΔNzpil или
* если τ1=τ2=τ3=τ:
γaff=[1/(1+-τ·s)]·γmes+[τ/(1+τ·s)]·(g/V)·ΔNzpil.
Вдоль оси у (которая представляет собой боковую ось летательного аппарата, расположенную под прямым углом к его вертикальной оси z) системы координат, связанной с данным летательным аппаратом (соответствующей боковым параметрам этого летательного аппарата, в частности таким, как курс, скольжение, крен), заданные значения, вводимые пилотом, предпочтительно выражаются в виде угловой скорости крена без того, чтобы это имело ограничительный характер. Эта угловая скорость крена представляет собой угловую скорость относительно оси крена, что позволяет в любой момент времени определить угол крена летательного аппарата. Угол крена, отличающийся от нуля, влечет за собой вираж данного летательного аппарата, и законы механики полета соответственно позволяют рассчитать ускорение Ау вдоль этой оси у. В том, что касается единиц измерения, ускорение представляет собой однородный параметр с коэффициентом перегрузки. Аналогичным образом, как это было показано по отношению к упомянутому выше примеру преобразования коэффициента перегрузки Nz в величину γderivee вдоль оси z, это ускорение Ау также может быть преобразовано в величину γderivee вдоль оси у.
И наконец, вдоль оси х (которая представляет собой продольную ось данного летательного аппарата и которая является перпендикулярной по отношению к осям z и у) системы координат, связанной с данным летательным аппаратом, заданные значения, вводимые пилотом, соответствуют главным образом тяге двигателей, управляемой, например, посредством рычагов управления двигателями. Изменения этой тяги вызывает ускорение Ах вдоль продольной оси х летательного аппарата, которое может быть преобразовано в величину γderivee вдоль этой оси х аналогичным образом, то есть таким же образом, как это уже было описано выше по отношению к преобразованиям, относящимся к осям у и z.
Кроме того, следует отметить, что в случае использования коллиматорного индикатора типа HUD, и поскольку ось х является перпендикулярной к плоскости этого индикатора HUD, имеется возможность для того, чтобы гарантировать ясность и читаемость индикации, перевести параметры, связанные с этой осью х, к индикации вдоль оси z при помощи обычного преобразования, называемого "общим углом наклона траектории".
Группа изобретений относится к контрольно-измерительной технике для летательных аппаратов. Согласно способу, автоматически и с повторением определяют поступающую на индикацию величину, представляющую величину подлежащего индикации вектора скорости и зависящую от некоторого первого слагаемого, содержащего измеренную и отфильтрованную величину вектора скорости. Далее представляют на экране вывода характерный символ, иллюстрирующий вектор скорости, положение которого на этом экране вывода является представительным для данной поступающей на индикацию величины. Для определения этой поступающей на индикацию величины определяют величину производной по времени вектора скорости, который управляется пилотом данного летательного аппарата, вычисляют второе слагаемое на основе величины производной управляемого вектора скорости и вычисляют сумму первого и второго слагаемых таким образом, чтобы сформировать поступающую на индикацию величину. Устройство содержит первое средство, предназначенное для измерения действительной величины вектора скорости летательного аппарата и вычислительный блок, предназначенный для определения автоматически и с повторением поступающей на индикацию величины, представляющей величину подлежащего индикации вектора скорости значения индикации и содержащий средство фильтрации, которое обеспечивает фильтрацию величины, измеренной при помощи упомянутого выше первого средства, таким образом, чтобы сформировать первое слагаемое. В состав устройства входят также блок индикации, предназначенный для представления на экране вывода характерного символа, иллюстрирующего этот вектор скорости, положение которого на экране вывода является представительным для поступающей на индикацию величины, и второе средство, предназначенное для определения производной по времени вектора скорости, управляемого пилотом данного летательного аппарата. Вычислительный блок дополнительно имеет в своем составе вычислительное средство, которое определяет второе слагаемое на основе упомянутой производной управляемого вектора скорости, и сумматор, который осуществляет сложение упомянутых выше первого и второго слагаемых таким образом, чтобы сформировать поступающую на индикацию величину. Группа изобретений обеспечивает индикацию, которая остается стабильной даже в случае мгновенных возмущений траектории летательного аппарата и характеризуется повышенной скоростью реакции в процессе изменения траектории. 3 н. и 6 з.п. ф-лы, 1 ил.
γ1=[1/(1+τ1·s)]·γmes,
в котором s представляет собой преобразование Лапласа;
τ1 представляет собой предварительно определенную постоянную времени;
γmes представляет собой измеренный вектор скорости.
γ2=[τ2/(1+τ3·s)]·γderivee,
в котором s представляет собой преобразование Лапласа;
τ2 и τ3 представляют собой предварительно определенные постоянные времени;
γderivee представляет собой производную вектора скорости, управляемого пилотом.
γderivee=(g/V)·ΔNzpil,
в котором g представляет собой ускорение силы тяжести;
V представляет собой скорость летательного аппарата.
| РАСШИРЯЮЩИЙСЯ ЦЕМЕНТ | 0 |
|
SU366164A1 |
| US 4143548 А, 13.03.1979 | |||
| US 5047653 А, 10.09.1991 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2192015C1 |

