Данное изобретение относится предпочтительно к таким вариантам применения, где необходимо захватывать трубные изделия и трубные колонны, осуществлять манипуляции и подъем инструментом, соединенным с вращателем бурового станка или конструкцией приложения реактивных усилий, для обеспечения передачи как аксиальных, так и крутильных нагрузок на захватываемую трубную секцию или от нее. В области бурения земли, строительства и ремонта скважин с помощью буровых установок и установок подземного ремонта скважин данное изобретение относится к клиновым захватам, и, более конкретно, на буровых установках с использованием верхних приводов, применяется в инструментах спуска трубных изделий, прикрепляемых к верхнему приводу для захвата приближенной к нему секции трубной колонны, наращиваемой в стволе скважины, развертываемой в нем или извлекаемой из него. Такие инструменты спуска трубных изделий несут различные функции, необходимые или полезные для данных работ, включающих в себя быстрое соединение и высвобождение, подъем, вдавливание, вращение и подачу текучей среды под давлением в трубную колонну и выпуск из нее. Данным изобретением созданы механизмы управления для расширения или улучшения диапазона захвата таких инструментов спуска трубных изделий.
До последнего времени механические трубные ключи использовали в установленном способе для спуска колонн обсадных или бурильных труб в нефтяные скважины и подъема из скважин во взаимодействии с подъемной системой буровой установки. Данный способ с использованием механических трубных ключей обеспечивает относительно эффективную сборку таких трубных колонн, состоящих из секций труб или звеньев со стыкующимися резьбовыми концами, посредством свинчивания стыкующихся резьбовых концов (скрепление) с образованием резьбовых соединений между последовательными секциями труб при их наращивании на колонну, установленную в стволе скважины; или в обратном процессе извлечение и разборку (раскрепление). Но данный способ с использованием механических трубных ключей одновременно не несет других полезных функций, таких как вращение, вдавливание или заполнение текучей средой, после наращивания секции трубы на колонну или ее удаления из колонны, и при спуске или подъеме колонны в стволе скважины. Спуск трубных изделий с использованием трубных ключей также обычно требует работы персонала в местах повышенной опасности, таких как буровой пол или, что еще опаснее, над буровым полом, на так называемых 'балконах для работы с обсадными трубами'.
Появление буровых установок, оборудованных верхними приводами, дало новый способ спуска трубных изделий и, конкретно, обсадной трубы, где верхний привод оборудован так называемым 'инструментом спуска трубных изделий верхнего привода' для захвата и, по возможности, создания уплотнения между ближайшей секцией трубы и полым валом верхнего привода. (Здесь следует понимать, что полый вал верхнего привода, в общем, имеет в своем составе такие компоненты привода колонны, которые можно прикреплять к нему, дальние концы которых эффективно действуют как удлинитель полого вала.) Поэтому разработаны различные устройства, в общем, предназначенные для выполнения 'спуска обсадной колонны верхним приводом'. Использование данных устройств во взаимодействии с верхним приводом обеспечивает подъем, вращение, вдавливание и заполнение колонны обсадных труб буровым раствором при спуске, таким образом, исключая ограничения, связанные с использованием механических трубных ключей. Одновременно автоматизация захватывающего механизма, в объединении со специфическими преимуществами верхнего привода, уменьшает степень требуемого участия персонала по сравнению со спуском с использованием механических трубных ключей и, таким образом, повышает безопасность.
Кроме того, при манипуляциях с обсадной колонной и спуске с использованием такого инструмента спуска трубных изделий с помощью верхнего привода, вес колонны должен переноситься с верхнего привода на опорное устройство, когда ближайшую или находящуюся в работе секцию трубы наращивают или удаляют из собранной колонны. Данную функцию обычно выполняет 'кольцевой клиновой захват', приводимое в действие аксиальной нагрузкой захватывающее устройство, использующее 'клиновой захват' или челюсти, размещенные в имеющем полость 'корпусе клинового захвата', через который спускают обсадную колонну, где корпус клинового захвата имеет канал в форме усеченного конуса с уменьшающимся вниз диаметром и опирается на буровой пол или установлен в буровом полу. Клиновой захват, действующий как кольцевые клинья между секцией трубы на ближайшем конце колонны и внутренней поверхностью в форме усеченного конуса корпуса клинового захвата, с приложением тяговой нагрузки захватывает трубу, но съезжает или скользит вниз и, таким образом, радиально внутрь на внутренней поверхности корпуса клинового захвата, когда вес колонны перенесен на захват. Радиальное усилие между клиновым захватом и корпусом трубы, таким образом, 'автоматически создается' или 'автоматически включается' осевой нагрузкой, т.e., при рассмотрении тяговой способности зависимой переменной и веса колонны независимой переменной, существует контур управления с положительной обратной связью, где независимая переменная веса колонны жестко передается по каналу обратной связи, управляя радиальным усилием захвата, которое монотонно действует, управляя тяговой способностью или сопротивлением скольжению, являющейся зависимой переменной. Аналогично, должно осуществляться противодействие крутящему моменту скрепления и раскрепления, прилагаемому к находящейся в работе секции трубы, на ближайшем конце собранной колонны. Данную функцию обычно выполняют трубные ключи, имеющие захваты, соединяющиеся с ближайшей секцией трубы, и рычаг, прикрепленный соединительным звеном, таким как цепь или трос, к конструкции буровой установки для предотвращения вращения и, при этом, создания противодействия крутящему моменту без реакции клиновых захватов в корпусе клинового захвата. Усилие захвата таких трубных ключей аналогично обычно 'автоматически создается' или 'автоматически включается' положительной обратной связью от приложенной нагрузки крутящего момента.
В общем плане захватывающий инструмент патентной заявки PCT CA 2006/00710 и заявки U.S. 11/912,665 можно описать как захватывающий инструмент, включающий в себя компоновку корпуса, имеющую несущий нагрузку переходник, присоединенный для передачи аксиальной нагрузки на остальную часть корпуса, или, короче, основной корпус, причем несущий нагрузку переходник, выполненный с возможностью конструктивного соединения с вращателем станка или рамой передачи реактивных усилий, захватывающую компоновку, которую несет основной корпус, имеющую поверхность захвата, причем захватывающую компоновку, снабженную средством включения в работу для радиального хода или перемещения из втянутого положения в положение соединения для радиального соединения тяговой нагрузкой поверхности захвата либо с внутренней поверхностью или с внешней поверхностью изделия в ответ на относительное аксиальное перемещение или аксиальный ход основного корпуса, по меньшей мере, в одном направлении относительно поверхности захвата. Создан механизм управления, действующий между компоновкой корпуса и захватывающей компоновкой, который при вращении, по меньшей мере, в одном направлении несущего нагрузку переходника относительно поверхности захвата, дает в результе аксиальное смещение основного корпуса относительно захватывающей компоновки для перемещения захватывающей компоновки из втянутого положения в положение соединения согласно действию средства включения в работу.
Данный захватывающий инструмент, таким образом, использует механически включаемый в работу механизм захвата, создающий свое захватывающее усилие в ответ на включение в работу аксиальной нагрузкой или аксиальным ходом компоновки захвата, причем включения в работу, происходящего либо совместно с приложением внешней аксиальной нагрузки и внешней нагрузки кручения или независимо от них, в форме приложения правого или левого крутящего момента, нагрузок, переносимых через инструмент от несущего нагрузку переходника компоновки корпуса на поверхность захвата захватывающей компоновки, соединенной тяговой нагрузкой с изделием.
Должно быть ясно, что полезность данных или других аналогичных захватывающих инструментов является функцией диапазона размеров изделия, обычно выражаемого минимальным и максимальным диаметрами трубных изделий, которые можно размещать между поверхностями захвата в полностью убранном и полностью выдвинутом положениями данного захватывающего инструмента, т.e. радиальным размером и радиальным ходом захватывающей поверхности. Полезность данного захватывающего инструмента можно улучшить, если инструмент сможет вмещать изделия с размерами более широкого диапазона. Настоящее изобретение направлено на удовлетворение данной потребности для вариантов применения, где увеличенный радиальный размер и радиальный ход являются полезными, что часто возникает при адаптации захватывающих инструментов для спуска трубных изделий нефтепромыслового сортамента.
Согласно широкому аспекту настоящего изобретения созданы механизмы управления выдвижением для использования в захватывающем инструменте в обеспечении удлинения радиального хода и увеличения размеров изделий, которые можно размещать в данном захватывающем инструменте, имеющем поверхность захвата, которую несут подвижные элементы захвата. Изобретение включает в себя механизм управления с тремя кулачковыми муфтами с кулачковыми парами, обеспечивающий двухповоротное управление аксиальным ходом, и дополнительные кулачковые механизмы управления, обуславливающие радиальный ход поверхности захвата инструмента как функцию аксиального хода.
Механизм управления с тремя кулачковыми муфтами включает в себя:
ведущую кулачковую муфту,
промежуточную кулачковую муфту,
ведомую кулачковую муфту,
ведущую кулачковую пару, действующую между ведущей кулачковой муфтой и промежуточной кулачковой муфтой, и
ведомую кулачковую пару, действующую между промежуточной кулачковой муфтой и ведомой кулачковой муфтой.
Предпочтительно, ведущая кулачковая пара выполнена с возможностью действия, только обуславливающего аксиальный ход, как функцию вращения при первом направлении вращения, и ведомая кулачковая пара - при втором направлении вращения, при этом разделение двухповоротного управления на две кулачковые пары обуславливает создание большего аксиального хода и, соответственно, радиального хода поверхности захвата, чем возможно при использовании одной кулачковой пары при двухповоротном механизме управления.
Данные и другие признаки изобретения должны стать более ясными из следующего описания, в котором выполнены ссылки на прилагаемые чертежи, выполненные только для иллюстрации, не направленные никоим образом на ограничение объема изобретения конкретными или показанными вариантами осуществления. На чертежах показано следующее:
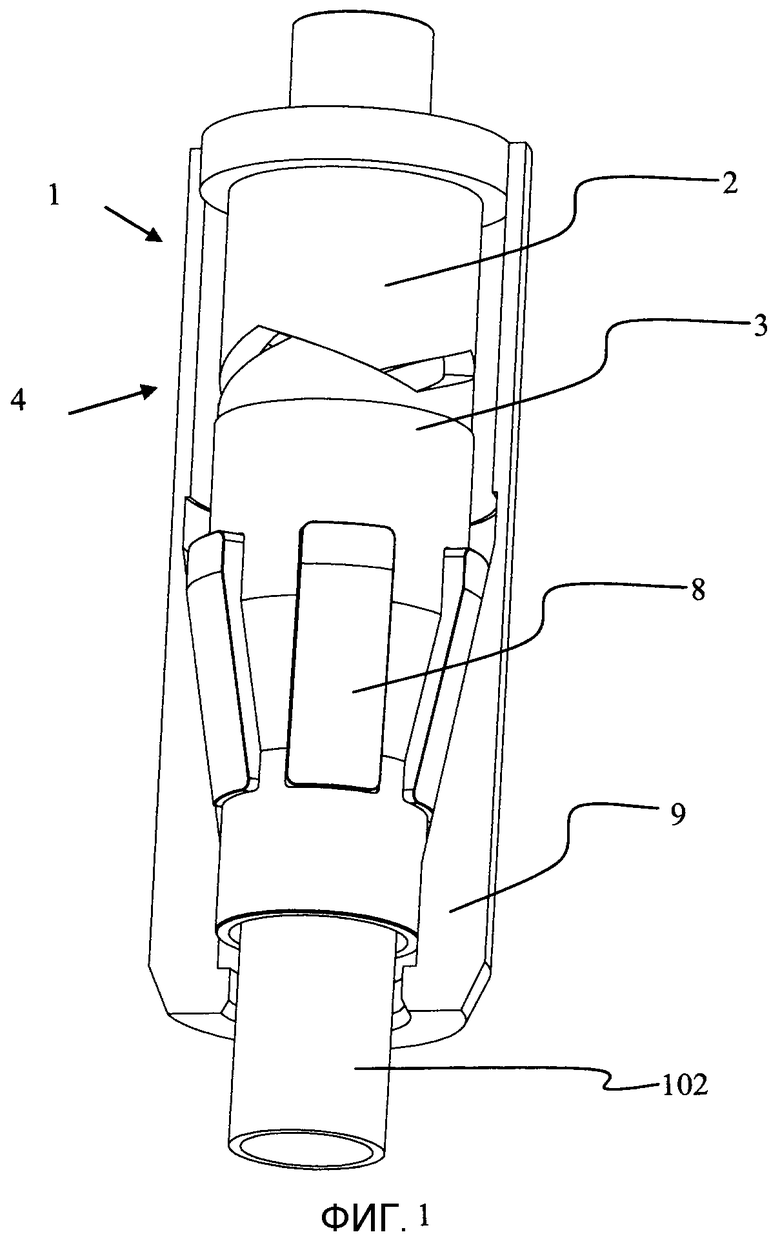
На Фиг. 1 изометрический вид с частичным вырезом упрощенной версии двухосного двухповоротно включаемого в работу инструмента спуска трубных изделий с внешним захватом, созданного в конфигурации архитектуры с одной кулачковой парой, показан, как он должен выглядеть с приложением правого крутящего момента.
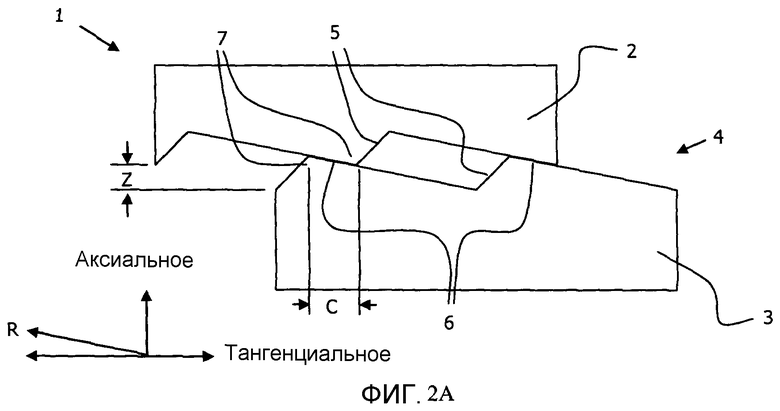
На Фиг. 2A схема базовой конфигурации архитектуры с одной кулачковой парой Фиг. 1 в двумерном представлении показана, как она должна выглядеть с приложением правого крутящего момента.
На Фиг. 2B схема архитектуры Фиг. 2A в двумерном представлении показана, как она должна выглядеть с приложением правого крутящего момента.
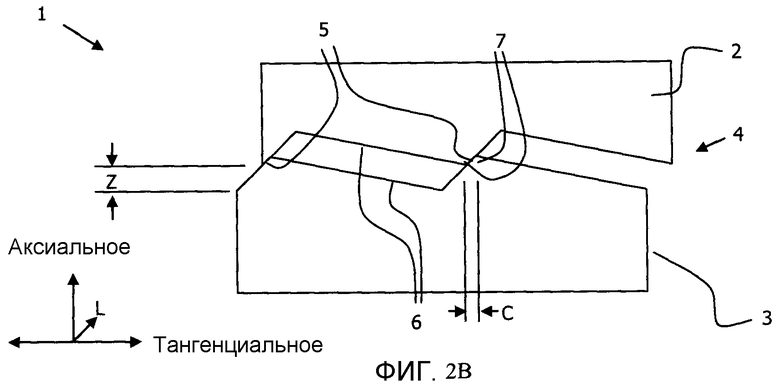
На Фиг. 3 схема архитектуры с тремя кулачковыми муфтами в двумерном представлении показана без приложения крутящего момента.
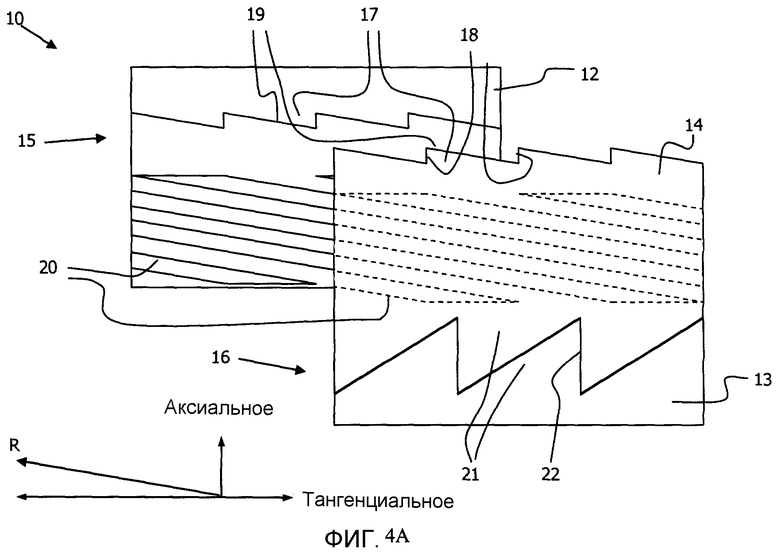
На Фиг. 4A схема архитектуры с тремя кулачковыми муфтами Фиг. 3 в двумерном представлении показана, как она должна выглядеть с приложением правого крутящего момента.
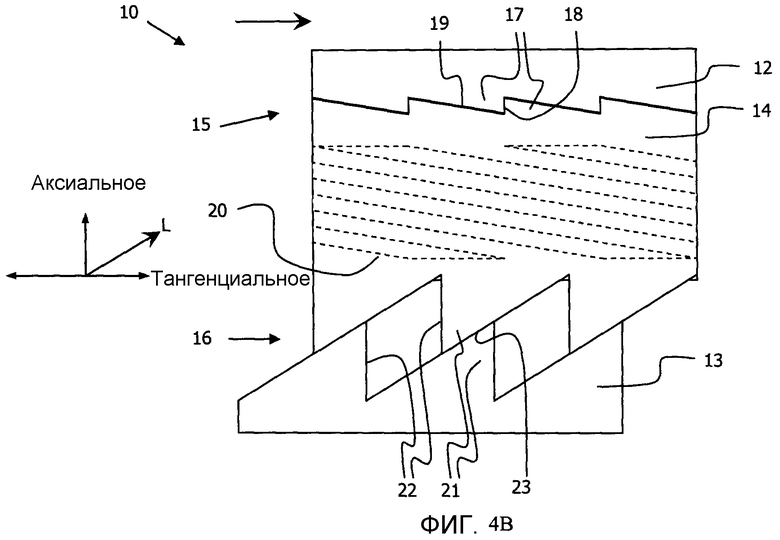
На Фиг. 4B схема архитектуры с тремя кулачковыми муфтами Фиг. 3 в двумерном представлении показана, как она должна выглядеть с приложением левого крутящего момента.
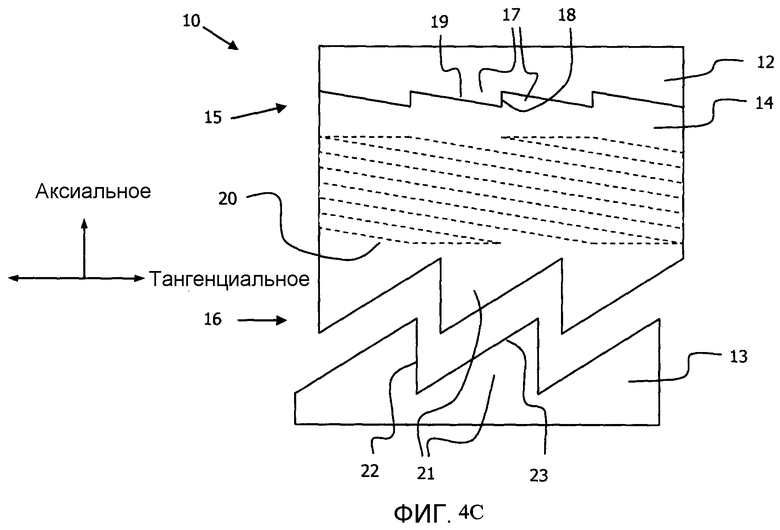
На Фиг. 4C схема архитектуры с тремя кулачковыми муфтами Фиг. 3 в двумерном представлении показана, как она должна выглядеть в захватывающем инструменте с приложенным аксиальным растяжением.
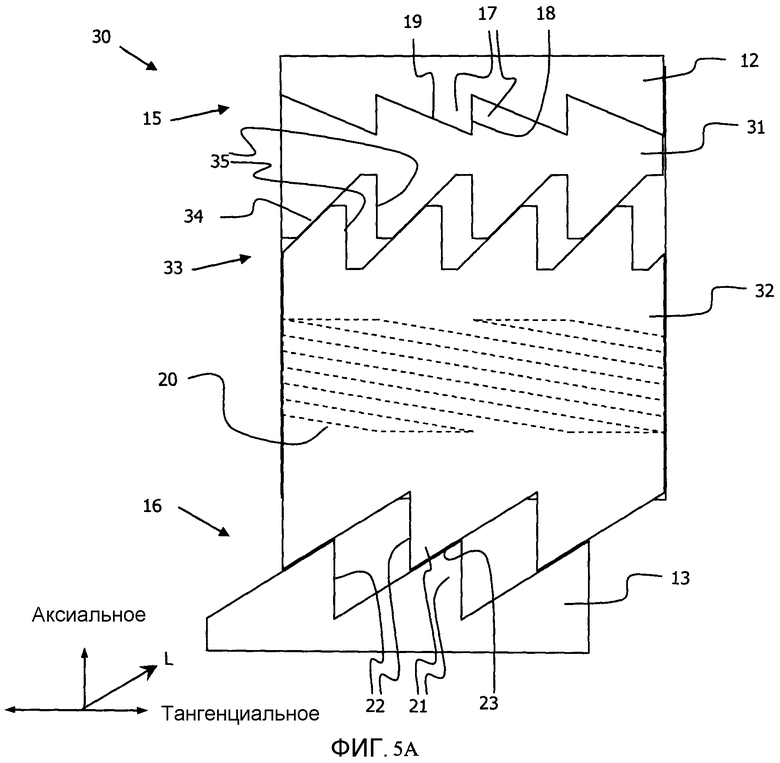
На Фиг. 5A схема архитектуры с тремя кулачковыми муфтами с кулачковой парой с подъемом упоров в двумерном представлении показана, как она должна выглядеть с приложением левого крутящего момента.
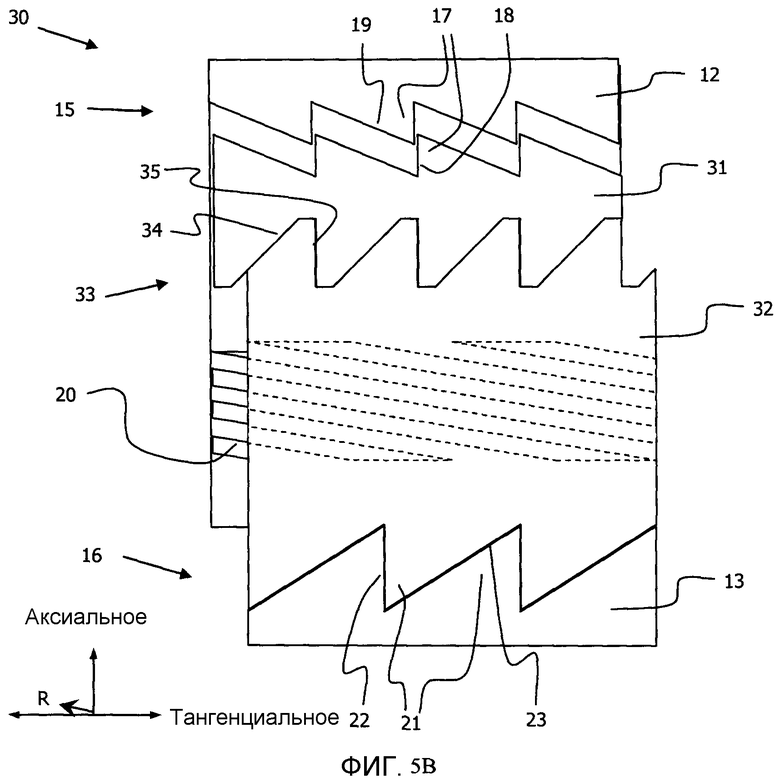
На Фиг. 5B схема архитектуры с тремя кулачковыми муфтами Фиг. 5A с кулачковой парой с подъемом упоров в двумерном представлении показана, как она должна выглядеть с небольшим правым поворотом до подъема упоров в нейтральное положение.
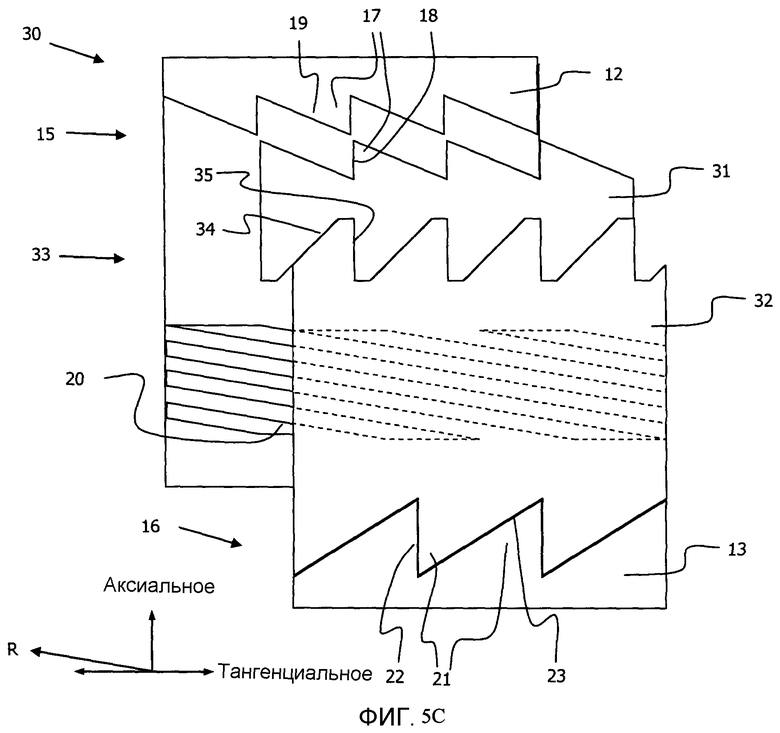
На Фиг. 5C схема архитектуры с тремя кулачковыми муфтами Фиг. 5A с подъемом упоров в двумерном представлении показана, как она должна выглядеть с приложением правого крутящего момента.
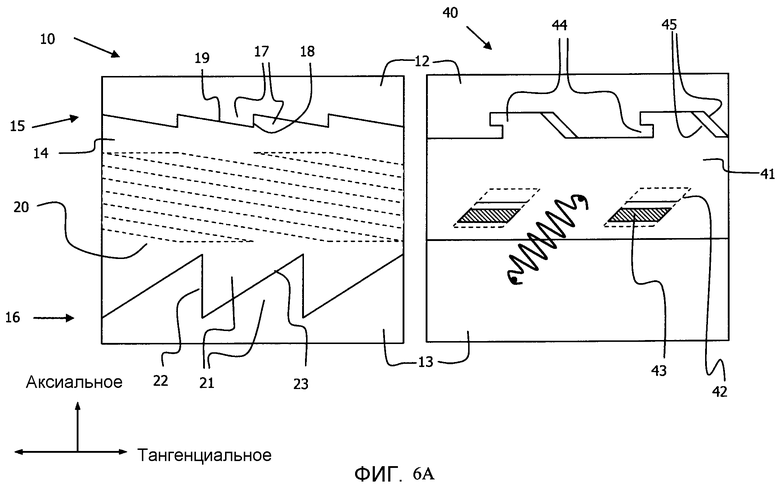
На Фиг. 6A схема архитектуры с тремя кулачковыми муфтами Фиг. 3 с фиксатором в двумерном представлении показана, как она должна выглядеть в фиксированном положении.
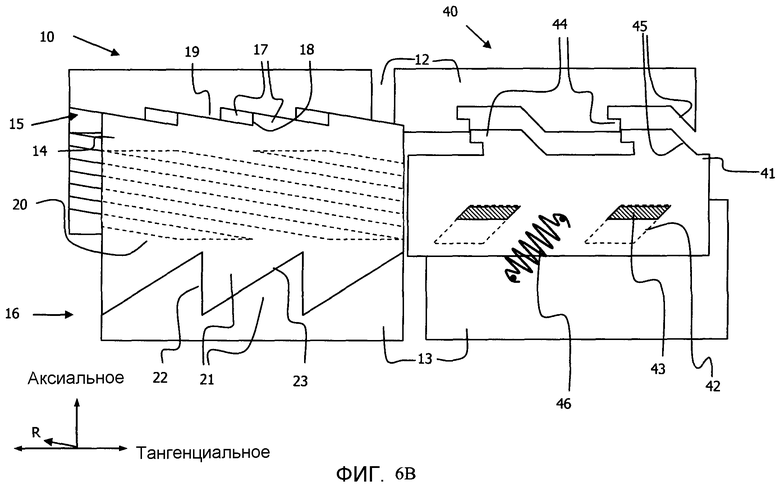
На Фиг. 6B схема архитектуры с тремя кулачковыми муфтами Фиг. 3 с фиксатором в двумерном представлении показана, как она должна выглядеть с приложением правого крутящего момента, с отсоединенным фиксатором.
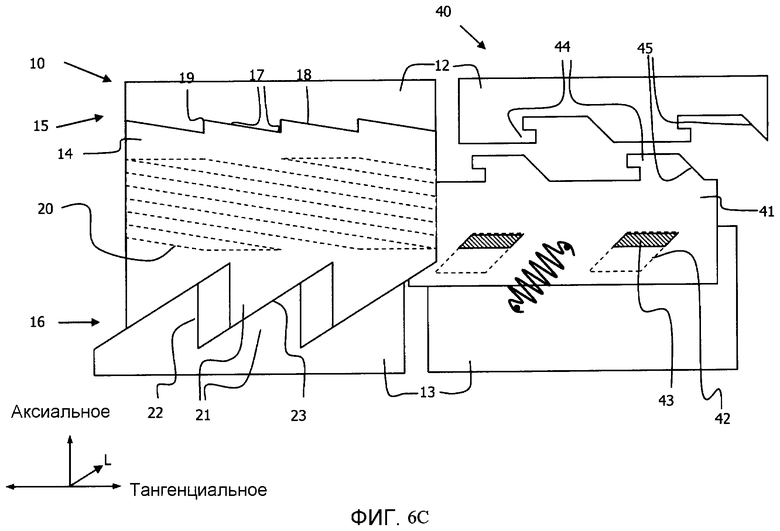
На Фиг. 6C схема архитектуры с тремя кулачковыми муфтами Фиг. 3 с фиксатором в двумерном представлении показана, как она должна выглядеть с отсоединенным фиксатором и с приложением левого крутящего момента.
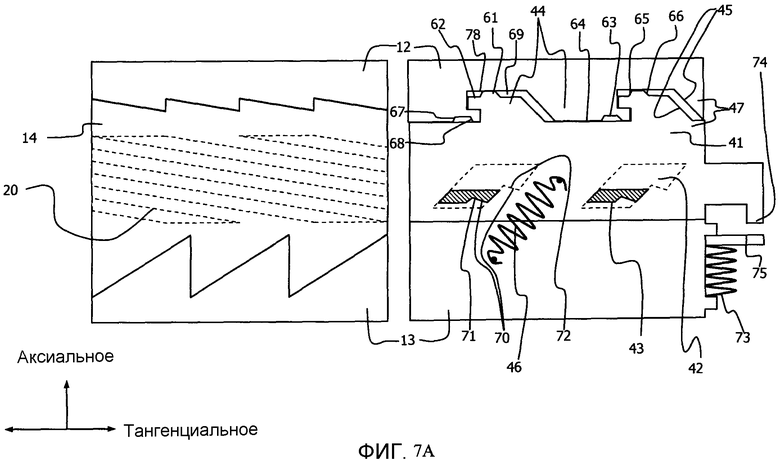
На Фиг. 7A схема архитектуры с тремя кулачковыми муфтами Фиг. 3 с фиксатором с возможностью блокировки в двумерном представлении показана, как она должна выглядеть в фиксированном положении.
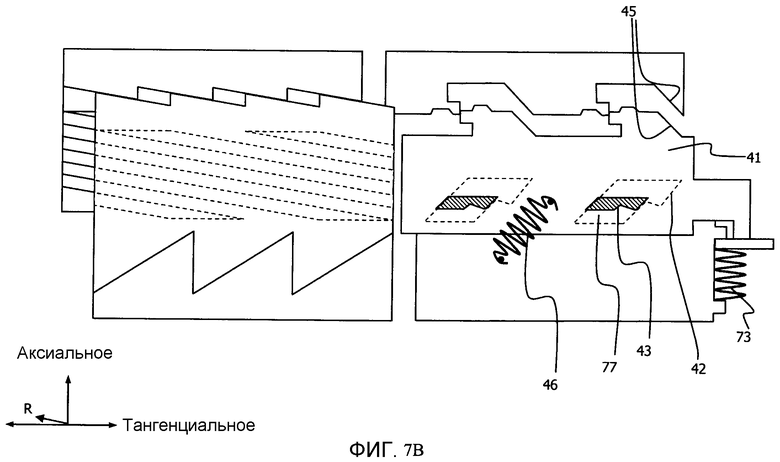
На Фиг. 7B схема архитектуры с тремя кулачковыми муфтами Фиг. 3 с фиксатором с возможностью блокировки в двумерном представлении показана, как она должна выглядеть с приложением правого крутящего момента с отсоединенным фиксатором.
На Фиг. 7C схема архитектуры с тремя кулачковыми муфтами Фиг. 3 с фиксатором с возможностью блокировки в двумерном представлении показана, как она должна выглядеть с отсоединенным фиксатором и приложенным левым крутящим моментом.
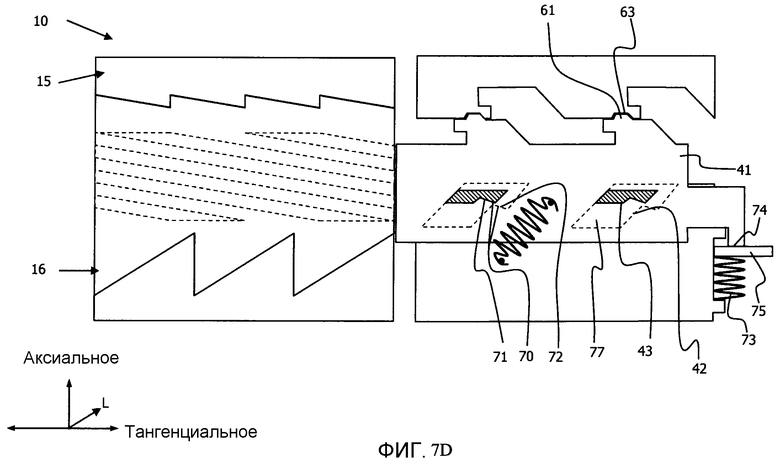
На Фиг. 7D схема архитектуры с тремя кулачковыми муфтами Фиг. 3 с фиксатором с возможностью блокировки в двумерном представлении показана, как она должна выглядеть с отсоединенным фиксатором и сжатием, приложенным от соединения на ведомую кулачковую пару.
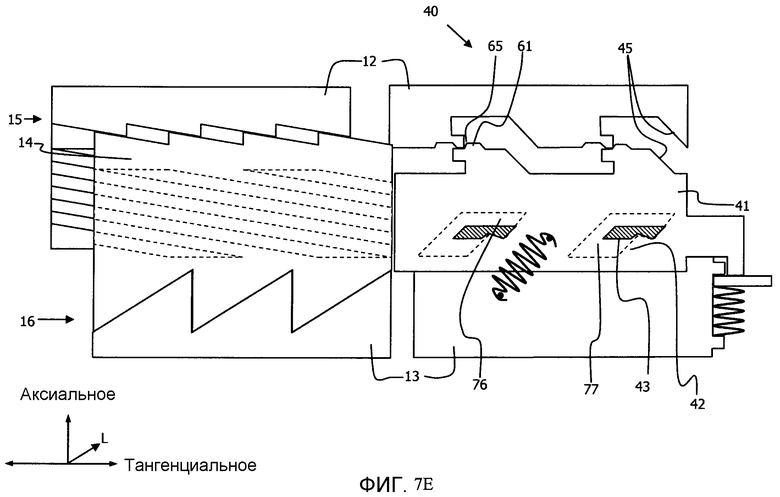
На Фиг. 7E схема архитектуры с тремя кулачковыми муфтами Фиг. 3 с фиксатором с возможностью блокировки в двумерном представлении показана, как она должна выглядеть с отсоединенным фиксатором и сжатием, приложенным от соединения на ведущую кулачковую пару.
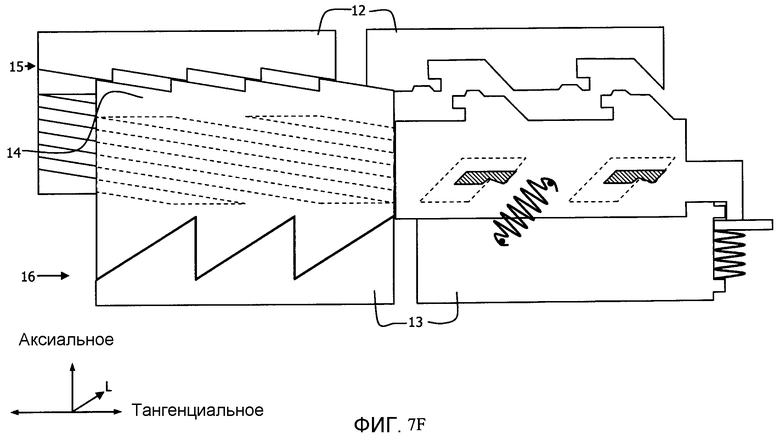
На Фиг. 7F схема архитектуры с тремя кулачковыми муфтами Фиг. 3 с фиксатором с возможностью блокировки в двумерном представлении показана, как она должна выглядеть для варианта с блокированным фиксатором и приложенным правым крутящим моментом.
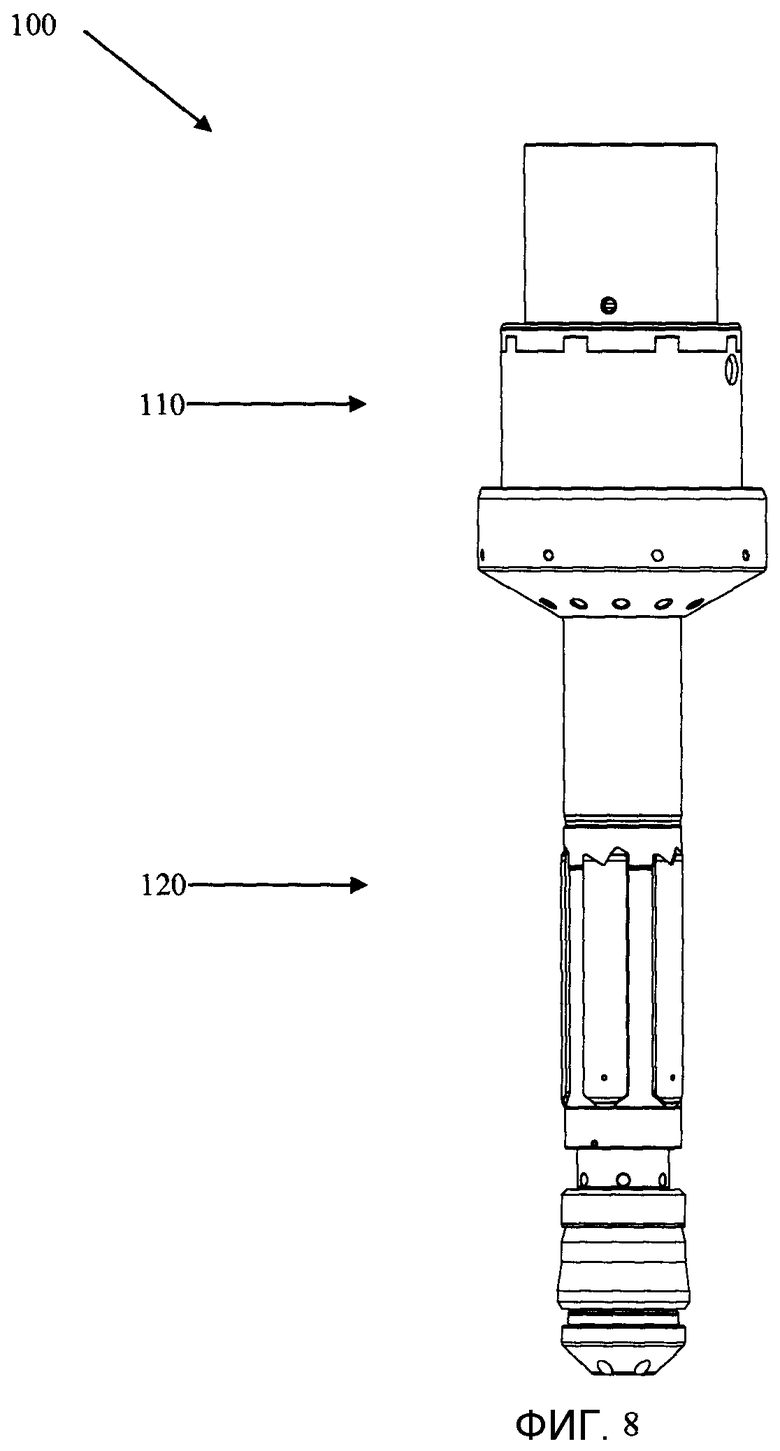
На Фиг. 8 внешний вид инструмента спуска трубных изделий с архитектурой с тремя кулачковыми муфтами показан, как он должен выглядеть в фиксированном положении.
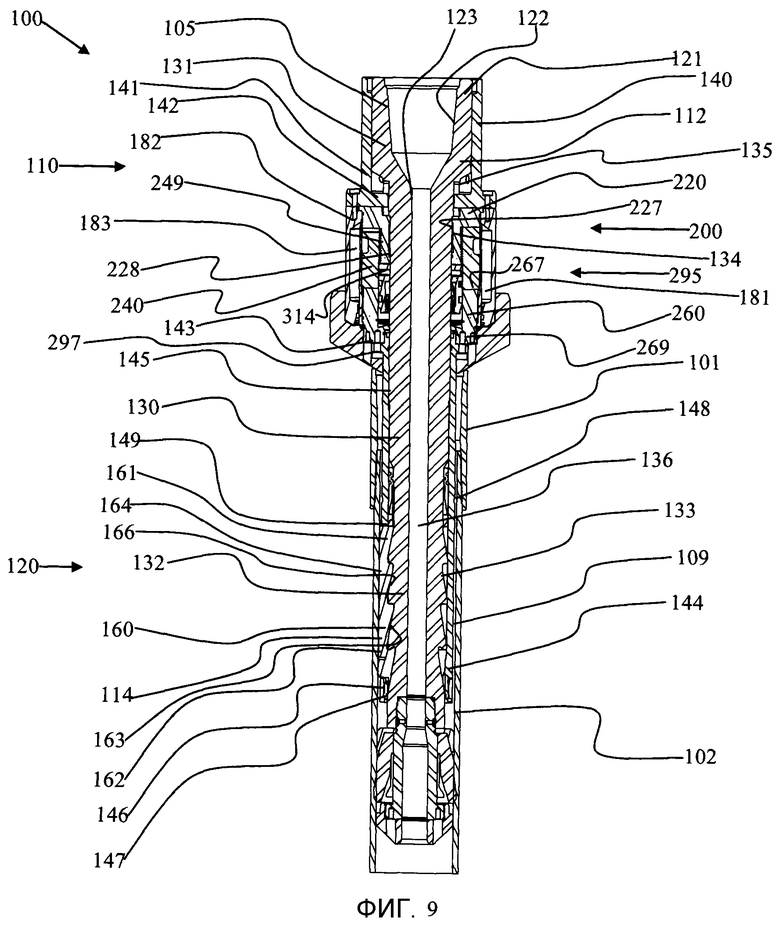
На Фиг. 9 вид сечения инструмента спуска трубных изделий с архитектурой с тремя кулачковыми муфтами показан, как он должен выглядеть в фиксированном положении, с размещением внутри ближнего конца изделия.
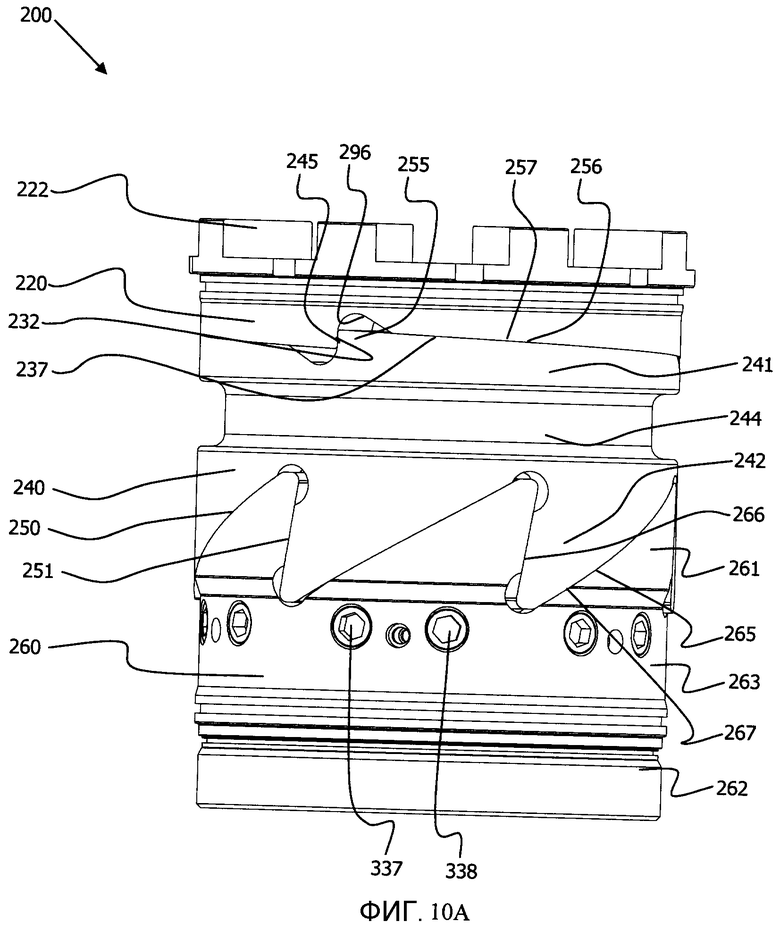
На Фиг. 10A внешний вид компоновки с тремя кулачковыми муфтами показан, как он должен выглядеть в фиксированном положении.
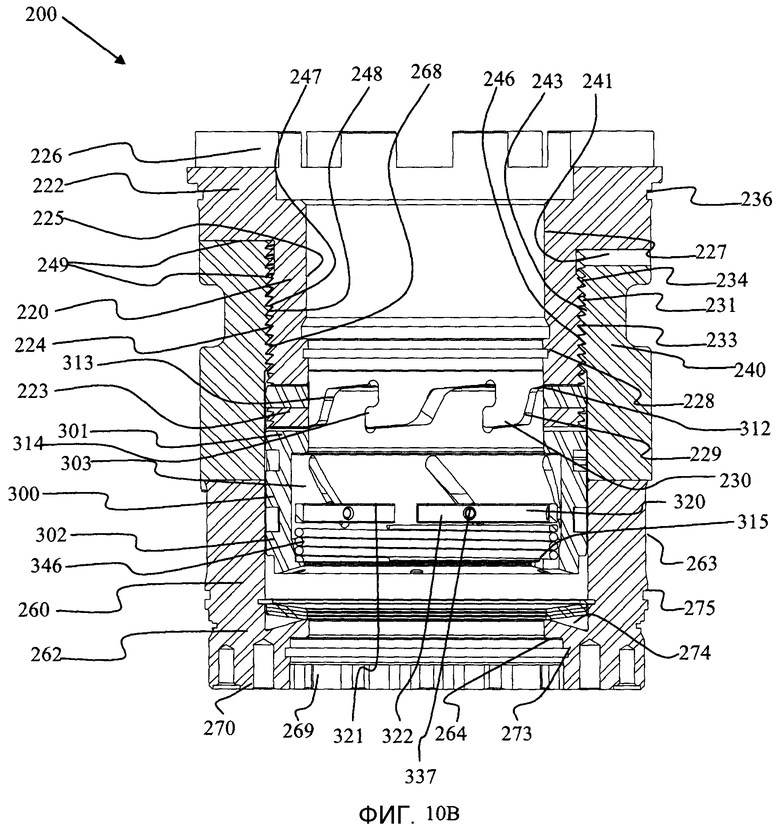
На Фиг. 10B вид сечения компоновки с тремя кулачковыми муфтами показан, как он должен выглядеть в фиксированном положении.
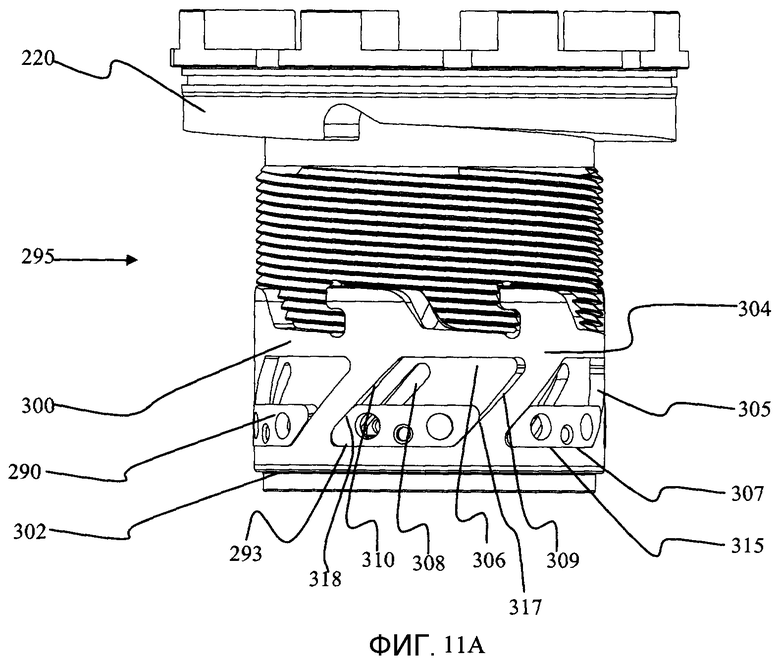
На Фиг. 11A внешний вид части компоновки фиксатора, включающей в себя ведущую кулачковую муфту, кольцо фиксатора и шпонки фиксатора, показан, как он должен выглядеть в фиксированном положении.
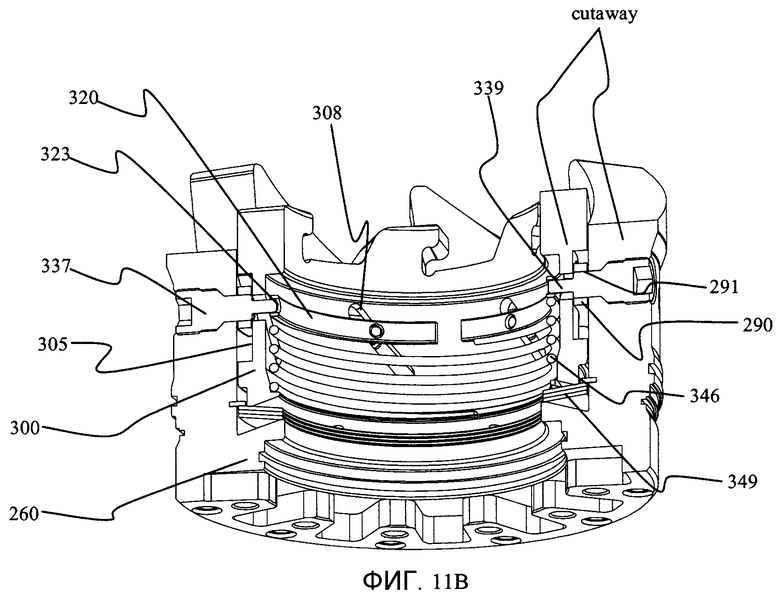
На Фиг. 11B частично в разрезе изометрический вид части компоновки фиксатора, включающей в себя ведомую кулачковую муфту, кольцо фиксатора и шпонки фиксатора, показан, как он должен выглядеть для отсоединенного положения.
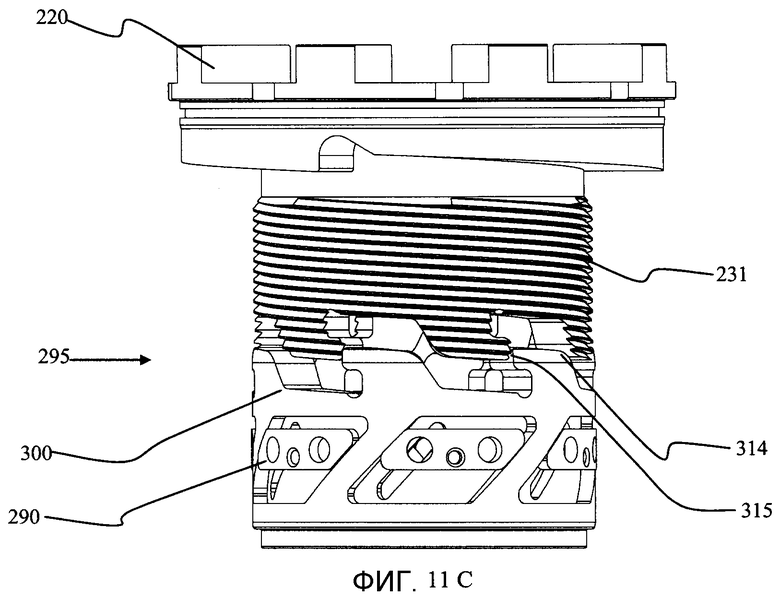
На Фиг. 11C внешний вид компоновки части фиксатора, включающей в себя ведущую кулачковую муфту, кольцо фиксатора и шпонки фиксатора, показан, как он должен выглядеть для отсоединенного положения.
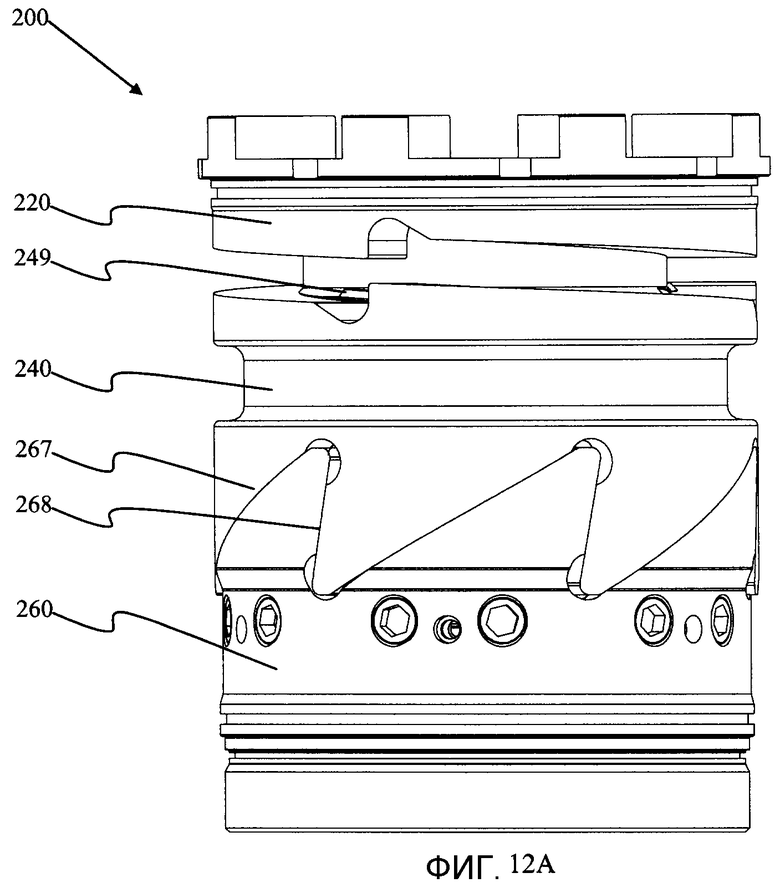
На Фиг. 12A внешний вид компоновки с тремя кулачковыми муфтами показан, как он должен выглядеть с приложением правого крутящего момента.
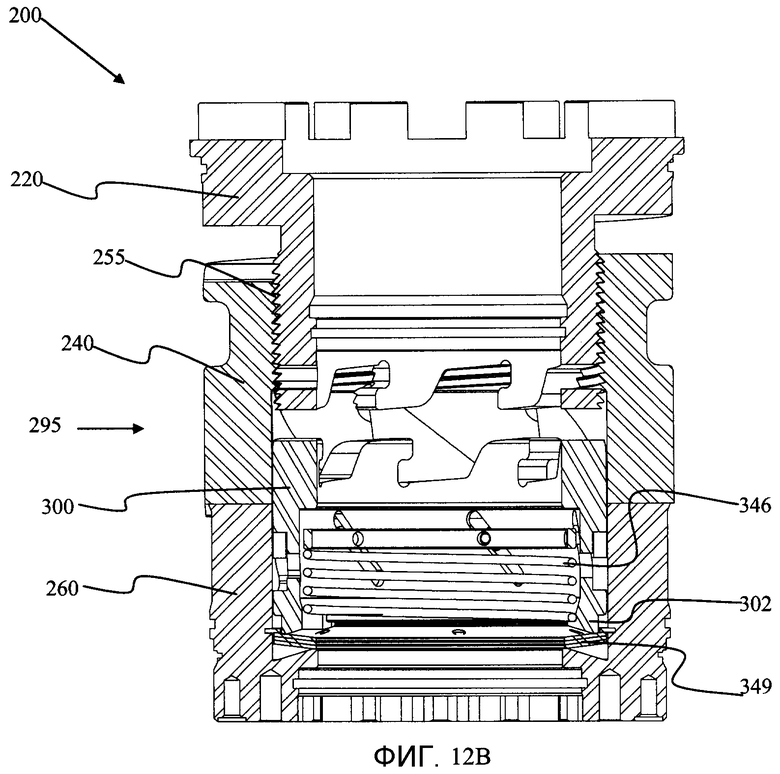
На Фиг. 12B вид сечения компоновки с тремя кулачковыми муфтами показан, как он должен выглядеть с приложением правого крутящего момента.
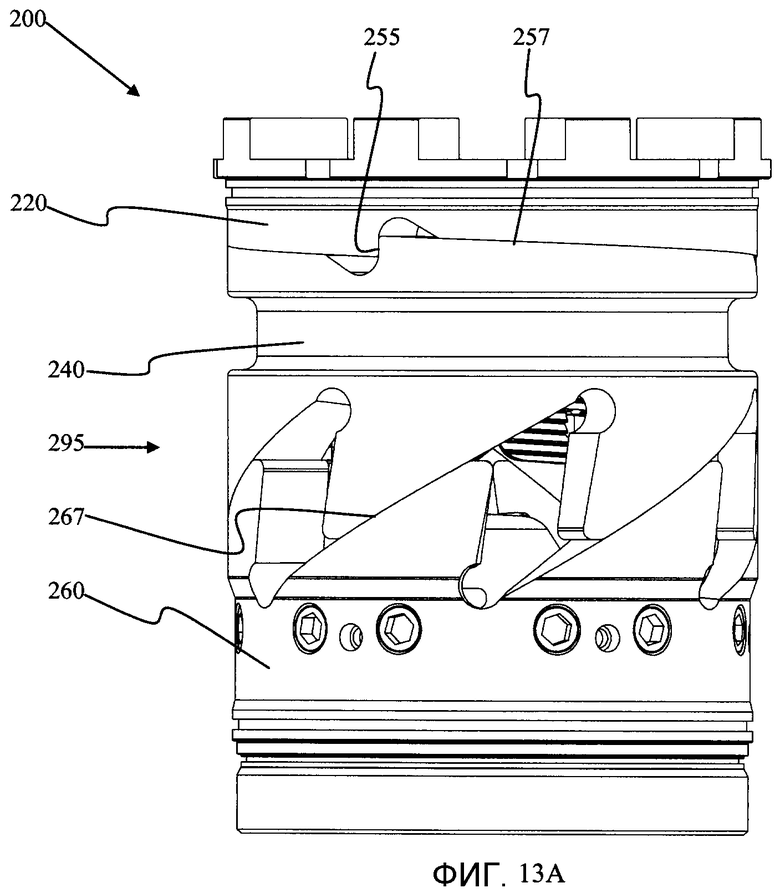
На Фиг. 13A внешний вид компоновки с тремя кулачковыми муфтами показан, как он должен выглядеть с отсоединенным фиксатором и приложенным левым крутящим моментом.
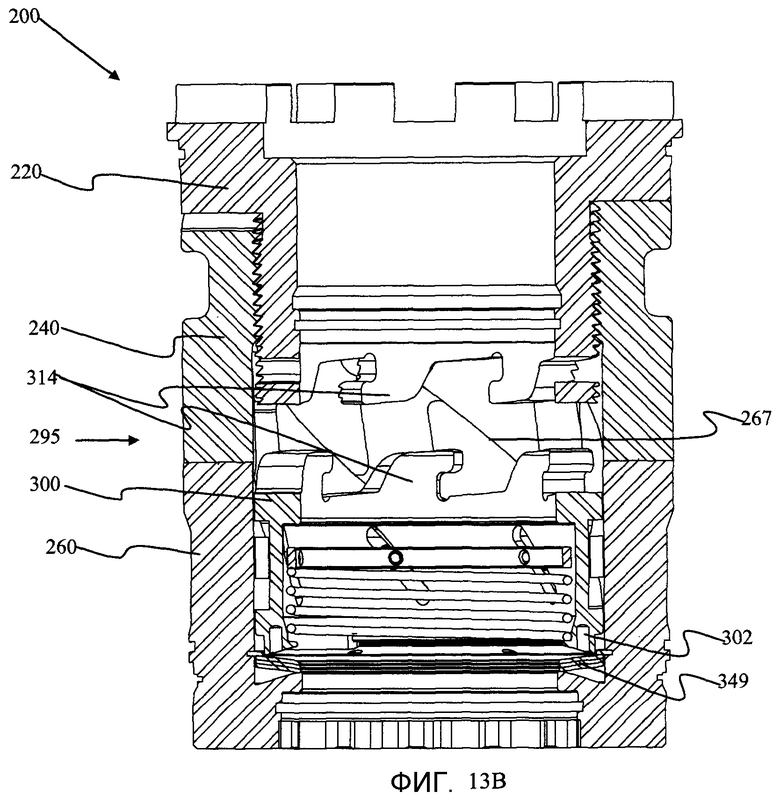
На Фиг. 13B вид сечения компоновки с тремя кулачковыми муфтами показан, как он должен выглядеть с отсоединенным фиксатором и приложенным левым крутящим моментом.
Захватывающий инструмент, описанный в патентной заявке PCT CA 2006/00710, состоит из трех основных взаимодействующих компонентов или компоновок: 1) компоновка корпуса, 2) захватывающая компоновка, которую несет компоновка корпуса и 3) механизм управления, действующий между компоновкой корпуса и захватывающей компоновкой. Компоновка корпуса, в общем, создает конструктивную связь компонентов инструмента и включает в себя несущий нагрузку переходник, посредством которого нагрузка от вращателя станка или рамы передачи реактивных усилий передается на остальные части компоновки корпуса или основной корпус или от них. Захватывающая компоновка имеет поверхность захвата, компоновку несет основной корпус компоновки корпуса, и компоновка снабжена средством радиального хода или перемещения поверхности захвата из втянутого положения в положение соединения в ответ на относительное аксиальное перемещение или аксиальный ход для радиального и тягового соединения изделия с поверхностью захвата. Захватывающая компоновка, таким образом, действует как включаемый в работу аксиальной нагрузкой или аксиальным ходом элемент захвата.
Основной корпус устанавливают коаксиально относительно изделия для создания кольцевого пространства, в котором размещается, включаемая в работу аксиальным ходом, захватывающая компоновка, соединенная с основным корпусом. Поверхность захвата захватывающей компоновки приспособлена для конформного, распределенного по окружности и с общим противодействием, тягового соединения с изделием. Средство осуществления радиального хода захватывающей поверхности, которую несет захватывающая компоновка, выполнено с возможностью связывания относительного аксиального смещения, или аксиального хода, по меньшей мере, в одном аксиальном направлении, с радиальным смещением или радиальным ходом поверхности захвата к изделию с коррелирующими аксиальными и общего противостояния радиальными усилиями, при этом возникающими так, что радиальная сила захвата на поверхности захвата обеспечивает реакцию аксиальной нагрузки и крутящий момент в изделии, где распределенная радиальная сила захвата имеет внутреннее противодействие, при этом устройство содержит, приводимый в действие аксиальной нагрузкой, механизм захвата, где несение аксиальной нагрузки распределено между вращателем станка или рамой передачи реактивных усилий и изделием; грузовым переходником, основным корпусом и элементом захвата, в общем, действующими последовательно.
Механизм управления, действующий между компоновкой корпуса и захватывающей компоновкой, выполнен с возможностью связывания относительного вращения между несущим нагрузку переходником и поверхностью захвата с аксиальным ходом захватывающей компоновки и, следовательно, радиальным ходом поверхности захвата. Включаемый в работу аксиальной нагрузкой механизм захвата, таким образом, выполнен с возможностью обеспечения относительного вращения между одним или обоими несущими аксиальную нагрузку стыками, между грузовым переходником и основным корпусом или основным корпусом и элементом захвата, относительное вращение которого ограничено, по меньшей мере, одним включаемым в работу вращением механизмом управления, связывающим относительное вращение между грузовым переходником и поверхностью захвата с аксиальным ходом элемента захвата и, следовательно, радиальным ходом поверхности захвата. Механизм управления или механизмы могут быть выполнены для создания данного взаимоотношения между вращением и аксиальным ходом в многочисленных вариантах, таких как механизм с поворотными рычагами или качающимися корпусами, действующими между компоновкой корпуса и захватывающей компоновкой, но может также быть выполнен в форме кулачковых пар, действующих между элементами захвата, и, по меньшей мере, одного из следующего: основной корпус или несущий нагрузку переходник для немедленного восприятия, таким образом, и передачи аксиальных и крутильных нагрузок, обуславливающих или стремящихся вызывать вращение и поддержание развития радиальной силы захвата. Кулачковые пары, действующие, в общем, способом, использующим кулачковую муфту и перемещающийся по кулачковой муфте копир, имеющие контактные поверхности, выполнены в предпочтительном варианте осуществления для связывания их объединенного относительного вращения, по меньшей мере, в одном направлении, с аксиальным ходом элемента захвата в направлении для уплотнения захвата, при этом аксиальный ход, таким образом, имеет аналогичное действие с аксиальным ходом, созданным аксиальной нагрузкой, которую несет элемент захвата, и действует в объединении с ней. Применение относительного вращения между вращателем станка или рамой передачи реактивных усилий и поверхностью захвата, находящейся в контакте с изделием, по меньшей мере, в одном направлении, таким образом, обуславливает радиальный ход или радиальное смещение поверхности захвата в соединение с изделием с коррелятивными аксиальной силой, крутящим моментом и радиальной силой, при этом возникающими, так что радиальная сила захвата на поверхности захвата обеспечивает реакцию крутящего момента в изделии, при этом устройство содержит включение в работу крутильных нагрузок так, что вместе с включением в работу аксиальной нагрузки механизм захвата автоматически включается в работу в ответ на объединенное нагружение по двум осям, по меньшей мере, в одном аксиальном и, по меньшей мере, в одном тангенциальном направлении или направлении кручения.
Также согласно патентной заявке PCT CA 2006/00710 компоновки с кулачковыми муфтами можно использовать в различных устройствах, как обобщено в заявке в таблице 1, где данные компоновки, имеющие функции "кулачковых муфт", в таблице 1, создают относительное аксиальное перемещение между ведущими и ведомыми кулачковыми компоновками как функцию приложенного относительного вращения; при этом взаимоотношение контролируют выбором локального шага или угла наклона винтовой линии, действующего на стыке кулачковой пары. В случае, если данное действие должно являться двухповоротным (включаться в работу при левом и правом вращениях) и снабжено кулачковой компоновкой, состоящей из одной кулачковой пары, показанной и описанной, как пилообразные профили между стыкующимися профилированными концами в общем цилиндрических и коаксиально совмещенных жестких корпусов, как на Фиг. 11B (показывающей кулачковую муфту, используемую в базовой архитектуре или Конфигурации 1 таблицы 1, как она может выглядеть во внешнем захватывающем инструменте), которые повторно представлены здесь на Фиг. 1, показывающей компоновку 1 кулачковых муфт, имеющую ведущую кулачковую муфту 2 и ведомую кулачковую муфту 3, создающие кулачковую пару 4, которую они могут образовывать с приложением правого вращения. Здесь применяем наименования "ведущий" и "ведомый" для кулачковых муфт для удобства в описании относительных перемещений и сил. Данное не следует понимать ограничивающим в отношении применения, поскольку, в общем, описанные кулачковые системы можно инвертировать.
На Фиг. 2A компоновка 1 кулачковых муфт показана схематично в двумерном представлении, где аксиальное и тангенциальное направления показаны, как ордината и абсцисса, соответственно, в графике на Фиг. 2A. Тангенциальное положение, таким образом, представляет местоположение на окружности, и тангенциальное смещение представляет вращение. Кулачковая пара 4 представлена стыкующимися многозаходными правыми винтообразными несущими нагрузку поверхностями 5, показаными здесь, как два захода с промежуточным углом подъема винтовой линии, и левыми винтообразными несущими нагрузку поверхностями 6 с двумя заходами, показанными здесь с относительно малым углом подъема винтовой линии, т.e. меньшим шагом, чем у винтообразных несущих нагрузку поверхностей 5, где пересечение винтообразных несущих нагрузку поверхностей 5 и 6 образует выступы или пики 7. Ясно что при увеличении правого относительного вращения, левые винтообразные несущие нагрузку поверхности 6 соединяются, при этом длина "C" тангенциального контакта в соединении уменьшается, тогда как относительное аксиальное разведение "Z" (аксиальный ход) между ведущей и ведомой кулачковыми муфтами увеличивается до прихода в положение ограничения, где дополнительное вращение может давать, в результате, установку пиков друг на друга. Поскольку кулачковая пара должна также передавать нагрузку, фактически возникает ограничивающее положение, когда величина контакта недостаточна для несения требуемой нагрузки, обеспечивающей общее смещение, представленное вектором R на показанном графике, где аксиальный компонент R равен Z, т.e. аксиальному ходу. На Фиг. 2B данное ограничение показано для компоновки 1 кулачковых муфт, как оно должно выглядеть в результате приложения левого вращения к ведущей кулачковой муфте 2 относительно ведомой кулачковой муфты 3, обуславливающего действие правых винтообразных несущих нагрузку поверхностей 5, где общее смещение представлено вектором L. Таким образом, имеются ограничения аксиального хода и грузоподъемности (представленные размерами Z и C соответственно на Фиг. 2A и 2B) такой одиночной кулачковой пары двухповоротного вращения, особенно при объединении с другими, параллельно действующими, конструктивными параметрами, такими как предпочтительный шаг или углы подъема винтовой линии, управляющие как приведением в действие влево, так и вправо, как ясно из сравнения кулачковой пары 4 на Фиг. 2A и 2B при правом и левом вращениях соответственно. Хотя такие конфигурации с одной кулачковой парой, создающие аксиальный ход, как функцию приложенного относительного вращения в двух направлениях, обеспечивают значительную полезность, в некоторых вариантах применения необходимы увеличенные ход и грузоподъемность.
Одной целью настоящего изобретения является создание средства, уменьшающего или эффективно исключающего данное ограничение в рабочем диапазоне и грузоподъемности, характерное для одиночных кулачковых пар, действующих в двух направлениях, причем средства, приспосабливающегося к любому из механизмов управления, именуемых "кулачковым" в таблице 1 PCT CA 2006/00710. На Фиг. 3 улучшенная архитектура кулачковых муфт настоящего изобретения (также на схеме с двумерным представлением, где аксиальное и тангенциальное направления показаны, как ордината и абсцисса соответственно) дает компоновку 10 с тремя кулачковыми муфтами, имеющую ведущую кулачковую муфту 12, ведомую кулачковую муфту 13 и, по меньшей мере, одну промежуточную кулачковую муфту 14 для действия между ведущей кулачковой муфтой 12 и ведомой кулачковой муфтой 13; и, следовательно, именуется в данном документе архитектурой с тремя кулачковыми муфтами. Ведущая кулачковая пара 15 выполнена с возможностью действия между ведущей и промежуточной кулачковыми муфтами, 12 и 14 соответственно, и ведомая кулачковая пара 16 выполнена с возможностью действия между промежуточной и ведомой кулачковыми муфтами 14 и 13 соответственно. Ведущая кулачковая пара 15 состоит из стыкующихся упоров 17, образованных относительно крутым углом подъема винтовой линии (здесь показаны вертикальными) стыка поверхностей 18 упоров и относительно малым углом подъема левой винтовой линии стыка поверхностей 19 наклонных упоров, где стыкующиеся винтообразные поверхности 19 наклонных упоров также действуют параллельно со стыкующейся несущей нагрузку резьбой 20. Ведомая кулачковая пара 16 состоит из стыкующихся несущих нагрузку наклонных участков 21, образованных стыкующимися под относительно крутым углом подъема винтовой линии поверхностями 22 наклонных упоров (здесь показаны вертикальными) и несущими нагрузку правыми стыкующимися винтообразными стыкующимися поверхностями 23 наклонных упоров, здесь показанных имеющими промежуточный угол подъема винтовой линии (аналогичными несущим нагрузку правым винтообразным поверхностям 5, показанным для кулачковой пары 4 на Фиг. 1).
На Фиг. 4A показана компоновка 10 с тремя кулачковыми муфтами, как она должна выглядеть с приложением некоторого правого вращения, обуславливающего относительное смещение ведущей кулачковой пары 15, вначале обуславливающего разведение поверхностей 18 упоров и при достаточном вращении также обуславливающего разведение поверхностей 19 наклонных упоров так, что нагрузку полностью несут стыкующиеся резьбы 20 несения нагрузки на смещении или в диапазоне, указанном вектором R. Теперь должно быть ясно, что при правом вращении аксиальный ход и грузоподъемность несущей нагрузку кулачковой пары 15 не ограничены полезной контактной длиной винтообразной поверхности 19 наклонных упоров, но только ограничены несущими нагрузку резьбами 20, которые можно легко выполнить для создания достаточной длины соединения и прочности для обеспечения адекватной прочности с практически неограниченным аксиальным ходом, эффективно исключая данные ограничения для целей проектирования. Фактически, поверхности 19 наклонных упоров являются дублирующими, и вообще не нуждающимися в соединении.
Как также показано на Фиг. 4A, углы подъема винтовой линии несущих наклонных участков 21 и поверхностей 22 наклонных упоров, образующих ведомую кулачковую пару 16, выбирают с учетом угла подъема винтовой линии несущей нагрузку резьбы 20, и других переменных, таких как коэффициент трения, как должно быть ясно специалисту в данной области техники, так что под действием выдвигающего или втягивающего правого вращения никакого смещения не происходит в ведомой кулачковой паре 16.
На Фиг. 4B показана компоновка 10 с кулачковыми муфтами, как она должна выглядеть с приложением левого вращения ведущей кулачковой муфты 12 относительно ведомой кулачковой муфты 13. В данном случае ведомая кулачковая пара 16 является активной и функционирует способом, аналогичным описанному выше для ведущей кулачковой пары 15, с обратными направлениями угла подъема винтовой линии несущих нагрузку наклонных участков. Приложение левого вращения к ведущей кулачковой муфте 12 обуславливает разведение поверхностей 21 наклонных упоров, и кореллятивный скользящий контакт на несущих нагрузку винтообразных поверхностях 23 обуславливает смещение промежуточной кулачковой муфты 14 и ведущей кулачковой муфты 12 аксиально вверх относительно ведомой кулачковой муфты 13, создавая смещение в пределах, указанных вектором L. На аксиальную нагрузку и нагрузку от левого крутящего момента, которую несет компоновка 10 с тремя кулачковыми муфтами, реагирует ведущая кулачковая пара 15, в которой упоры 17 посредством селекции угла подъема винтовой линии на контактирующих поверхностях 18 упоров и установку могут выполнять для управления способом реагирования на нагрузку через приводную кулачковую пару 15 для регулирования напряжения и предотвращения законтривания крутильными нагрузками на резьбе промежуточной кулачковой муфты 14 с ведущей кулачковой муфтой 12 вследствие их соединения на несущей нагрузку резьбе 20, т.e. фрикционного стопорения на резьбе по типу гайки и болта. Также, аналогично поведению при правом вращении, описанному выше, угол подъема винтовой линии несущих нагрузку наклонных участков 21 выбирают соответствующим углу подъема винтовой линии несущей нагрузку резьбы 20, так что под действием левого вращения для перемещения вперед или втягивания никакое смещение не происходит в ведущей кулачковой паре 15.
Теперь должно быть ясно, что в компоновке 10 с тремя кулачковыми муфтами созданы кулачковые пары (ведущая кулачковая пара 15 и ведомая кулачковая пара 16): первая активная и создающая аксиальный ход при правом вращении, когда вторая является статичной; и вторая активная и создающая аксиальный ход при левом вращении, когда первая является статичной.
Сравнение векторов R и L смещения на Фиг. 2A и 2B с векторами на Фиг. 4A и 4B соответственно показывает, что для сравнимых геометрических параметров аксиальный ход большей величины можно получить как при правом, так и левом вращении с ведущей и ведомой кулачковыми парами 15 и 16 (на Фиг. 4A и B) в архитектуре 10 с тремя кулачковыми муфтами, чем можно получить с одной, работающей в двух направлениях, кулачковой парой 4 (на Фиг. 2A и B).
Как также показано на Фиг. 4B, для описанной выше идеи включения несущей нагрузку резьбы 20 в состав ведущей кулачковой пары 15 должно быть ясно, что можно создавать несущую нагрузку резьбу 20, для работы во взаимодействии со стыкующимися несущими нагрузку винтообразными поверхностями 23 для увеличения хода и грузоподъемности; вместе с тем в некоторых вариантах применения в инструментах спуска трубных изделий может быть предпочтительным обеспечение свободного разведения ведущих и ведомых кулачковых муфт 12 и 13, соответственно, которое обеспечивает конфигурация, показанная на Фиг. 4C, где промежуточная кулачковая муфта 14 остается соединенной несущими нагрузку резьбами 20 с ведущей кулачковой муфтой 12, но не соединенной, таким образом, с ведомой кулачковой муфтой 13, обеспечивая свободное разведение, которое может требоваться для обеспечения приведения в действие захвата с приложением аксиальной нагрузки без одновременно действующего вращения, когда компоновку 10 с тремя кулачковыми муфтами используют, например, в базовой (Конфигурация 1) архитектуре захватывающего инструмента, показанного на Фиг. 1.
В качестве промежуточной архитектуры (не показано), где несущие нагрузку резьбы 20, соединяющие ведомую кулачковую муфту 13 и промежуточную кулачковую муфту 14, являются необходимыми, и все равно требуется некоторая степень аналогичной свободы для аксиального разведения, несущие нагрузку резьбы 20 можно снабдить существенным боковым зазором. Должно быть ясно специалисту в данной области техники, что для однозаходной резьбы данный боковой зазор ограничен только шагом резьбы с величиной меньше требуемых толщин гребней резьбы, так что значительное свободное аксиальное разведение можно получать для вариантов применения, где можно использовать относительно больший шаг, т.e. вариантов применения, где низкий угол подъема винтовой линии не требуется.
В качестве дополнительной промежуточной архитектуры (не показано) обе кулачковых пары могут быть выполнены, как поверхности наклонных упоров, продолжающие несущие нагрузку резьбы 20 (с малым боковым зазором), что можно именовать архитектурой с четырьмя кулачковыми муфтами (не показано). Архитектура с четырьмя кулачковыми муфтами может быть выполнена с четвертым кулачовым компонентом, имеющим ограничение, обеспечивающее аксиальное перемещение, но предотвращающее вращение относительно ведомой кулачковой муфты, и жестко прикрепленным к компоновке захвата так, что при высвобождении фиксатора компоновка с кулачковыми муфтами поддерживает возможность свободного аксиального хода для соединения с изделием под действием отклоняющей нагрузки. Такое устройство может быть полезным, если требуется ход больше, чем можно принимать в архитектуре с тремя кулачковыми муфтами (конкретно ограниченной устройством ведомой кулачковой пары).
Также на Фиг. 4B показано суммирование аксиальной высоты и, следовательно, несущей способности упоров 17, являющееся функцией шага или угла подъема винтовой линии, выбранного для стыкующейся несущей нагрузку резьбы 20 (и, аналогично, поверхности 19 наклонных упоров), так что для вариантов применения, где низкий угол подъема винтовой линии резьбы является предпочтительным, становится труднее обеспечивать достаточную прочность для реагирования на левую крутильную нагрузку, что достигается посредством упоров 17 с коррелятивно малой аксиальной высотой. Для таких вариантов применения дополнительной целью настоящего изобретения является создание средства преодоления данного ограничения посредством замены промежуточной кулачковой муфты 14 в компоновке 10 с тремя кулачковыми муфтами, как показано на Фиг. 5A, компоновкой 30 с промежуточными кулачковыми муфтами, действующей между ведущей кулачковой муфтой 12 и ведомой кулачковой муфтой 13. Компоновка 30 с промежуточными кулачковыми муфтами состоит из вспомогательного кольца 31 подъема упоров и трубы 32 с промежуточной кулачковой муфтой, где кулачковая пара 33 с подъемом упоров выполнена с возможностью действия между кольцом 31 с упорами и трубой 32 с промежуточной кулачковой муфтой. Кулачковая пара 33 с подъемом упоров имеет поверхности 34 с поднятыми наклонными участками и поверхности 35 с поднятыми ловителями. В общем компоновка 30 с промежуточной кулачковой муфтой действует способом, аналогичным промежуточной кулачковой муфте 14 в случае приложения правого и левого вращений, как показано на Фиг. 4A и 4B и описано выше для компоновки 10 с тремя кулачковыми муфтами. Если сравнить показанное на Фиг. 4B и 5A действие кольца 31 подъема упоров в случае приложения левого крутящего момента, является очевидным, где левый крутящий момент обуславливает перемещение кольца 31 с упорами вверх на поверхностях 34 поднятых наклонных участков, создавая полное соединение поверхностей 18 упоров, так что соединенная высота поверхностей 18 упоров, таким образом, становится больше, в случае если используют архитектуру с кольцом подъема упоров. Также должно быть ясно, что угол подъема винтовой линии поверхностей поднятых наклонных участков выбирают согласованным с углом подъема винтовой линии поверхностей 18 упоров для создания указанного полного соединения поверхностей 18 упоров при левом вращении, и, аналогично, соединенная длина поверхностей 34 поднятых наклонных участков коррелятивно выполнена для создания достаточной прочности для несения нагрузки, на которую реагируют поверхности 18 упоров. На Фиг. 5B показана компоновка 30 с тремя кулачковыми муфтами при умеренном правом вращении, кольцо 31 подъема упоров показано полностью соскользнувшим вниз по поверхности 34 поднятых наклонных участков (кулачковая пара 33 в полностью убранном положении), перемещение может быть различно создано следующим: предшествующим контактом с поверхностями 19 наклонных упоров при правом вращении (где угол подъема винтовой линии поверхности 19 наклонных упоров выбирают согласованно с углом подъема винтовой линии поднятых ловящих поверхностей 34 для создания такого перемещения); силой тяжести; или отклонением пружин (не показано), прикладывающих втягивающую силу относительно трубы 32 с промежуточными кулачковыми муфтами. В отношении данного положения кулачковая пара 15 выполнена так, что поверхности 18 упоров имеют некоторую степень перекрывания, достаточно большую для 'залавливания', если приложено левое вращение, но 'прохождения без соприкосновения' в случае приложения дополнительного правого вращения, обуславливающего дополнительный аксиальный ход с ограничением несущей нагрузку резьбы 20, как показано на Фиг. 5C.
Как показано на Фиг. 4C, в некоторых вариантах применения необходимо ограничивать свободное аксиальное разведение, обеспечиваемое между ведущими и ведомыми кулачковыми муфтами 12 и 13, соответственно, созданием фиксатора, конкретно, для поддержки вставления и удаления полностью механических захватывающих инструментов, как описано в PCT CA 2006/00710. Поэтому дополнительной целью настоящего изобретения является создание фиксатора, функционирующего в архитектуре с тремя кулачковыми муфтами, поддерживающего фиксацию ведущей кулачковой муфты 12 к ведомой кулачковой муфте 13, как показано на Фиг. 6A, где фиксатор 40 показан с компоновкой 10 с тремя кулачковыми муфтами, вновь в двумерном представлении, где радиальные плоскости, в которых осуществлены признаки фиксатора 40, в общем, отличающиеся от показанных выше признаков осуществления компоновки 10 с тремя кулачковыми муфтами. Кольцо 41 фиксатора является, в общем, трубчатым корпусом, плотно закрепленным и коаксиально установленным на ведомой кулачковой муфте 13, имеющей правые винтообразные пазы 42, в которых размещены плотно закрепляющие шпонки 43 фиксатора, при этом шпонки 43 фиксатора жестко прикреплены к ведомой кулачковой муфте, с данным устройством, удерживающим кольцо 41 фиксатора для перемещения только между аксиальным выдвинутым и втянутым положением относительно ведомой кулачковой муфты 13, задающей ход фиксатора по винтообразному пути с заданной длиной винтообразных пазов 42 относительно длины шпонки 43 фиксатора. Кулачковая пара 47 фиксатора выполнена с возможностью действия между кольцом 41 фиксатора и ведущей кулачковой муфтой 12 и образована, в общем, стыкующимися профилированными крюками 44 фиксатора, имеющими выбранную высоту несколько меньше, чем выбранный ход фиксатора, и имеющими задние поверхности 45. Крюки 44 фиксатора показаны в положении соединения на Фиг. 6A и в таком положении предотвращают аксиальное разведение ведущей кулачковой муфты 12 и ведомой кулачковой муфты 13, при этом на аксиальную нагрузку, действие которой может в ином случае их разводить, реагирует ведущая кулачковая муфта 12 через крюки 44 фиксатора в кольце 41 фиксатора и в шпонках 43 фиксатора, удерживаемых в винтообразных пазах 42, и от шпонок 43 фиксатора на ведомую кулачковую муфту 13, к которой шпонки 43 фиксатора прикреплены. Вместе с тем, при правом вращении, как показано на Фиг. 6B, крюки 44 фиксатора стремятся отсоединиться, и кольцо 41 фиксатора является свободным для втягивания, обеспеченного шпонками 43 в правых винтообразных пазах 42, где втягивание может быть создано различно следующим: силой тяжести; отклонением пружины 46, действующей между кольцом 41 фиксатора и ведомой кулачковой муфтой 13; или достаточным вращением, контактом задних поверхностей 45 крюков углами подъема винтовой линии, стыкующихся задних поверхностей 45 крюков, выбранных с соответственно углу подъема винтовой линии пазов 42 для создания втягивающих сил. С приложением левого вращения и с кулачковой парой 16, состыкованной, как показано на Фиг. 6B, т.e. без аксиального разведения, достаточное сцепление крюков 44 фиксатора также выполнено с возможностью повторной фиксации крюков 44. Вместе с тем, если ведущая кулачковая муфта 12 сначала поднимается, обуславливая аксиальное разведение, достаточное для предотвращения соединения крюков 44 фиксатора, затем прикладывают левое вращение, как показано на Фиг. 6C, повторное фиксирование предотвращается, и кулачковая пара 16 является активной, обуславливая аксиальный ход.
Процесс работы показанной на Фиг. 6A-6C и описанной выше компоновки с кулачковыми муфтами с началом в фиксированном положении можно описать в два этапа следующим образом:
1. Установка инструмента (в изделие).
2. Поворот вправо (для отсоединения фиксатора и соединения ведущей кулачковой пары).
В случае использования инструмента для раскрепления звеньев с соединением ведомой кулачковой пары требуются два следующих дополнительных этапа:
3а. Подхват на инструменте.
3б. Поворот влево (для соединения ведомой кулачковой пары).
Рабочий процесс отсоединения инструмента от изделия аналогично является простым и также требует двух или трех этапов от наклонных участков скрепления или раскрепления, соответственно, состоящих в следующем:
1. Установка инструмента.
2. Поворот влево (для втягивания компоновки захвата и соединения фиксатора).
Где для фиксации инструмента от ведомой кулачковой пары требуется один следующий дополнительный этап:
1a. Поворот вправо для соединения ведущей кулачковой пары, затем переход к этапу 1.
При условии простоты процесса работы не прогнозируемое или не случайное событие может приводить к одновременному приложению достаточного левого крутящего момента, вращения и сжатия, к инструменту для соединения фиксатора, и если такие события являются достаточно частыми, риск незапланированной фиксации и, следовательно, отсоединения компоновки захвата от изделия может являться неприемлемым. В таких вариантах применения, где необходимо ограничивать свободное аксиальное разведение, обеспечиваемое между ведущей и ведомой муфтами, создание фиксатора, конкретно для поддержки вставления и удаления полностью механических захватывающих инструментов, может также быть необходимо для предотвращения случайного соединения фиксатора. В этой связи, дополнительной целью настоящего изобретения является создание механизма блокировки, функционально связанного с архитектурой с тремя кулачковыми муфтами и фиксатором, показанной на Фиг. 4 и 6A-6C, соответственно. Дополнительный предпочтительный вариант осуществления настоящего изобретения показан в двумерной схеме на Фиг. 7A-7F и описан в данном документе. Данный вариант осуществления является встроенным механическим устройством блокировки, выполненным с возможностью включения функции блокировки в действие компоновки с кулачковыми муфтами Фиг. 6A-6C. Процесс работы оборудованной устройством стопорения компоновки с кулачковыми муфтами может быть описан в шести следующих этапах:
1. Установка инструмента (в изделие).
2. Поворот вправо (для отсоединения фиксатора).
3. Подхват (для освобождения крюков фиксатора).
4. Поворот налево (для соединения ведомой кулачковой пары).
5. Установка инструмента (для сжатия пружины).
6. Поворот вправо (для соединения механизма блокировки, соединения ведущей кулачковой пары, и захвата изделия).
Где требуется следующий дополнительный этап для раскрепления звеньев:
7. Поворот влево (для соединения ведомой кулачковой пары и захвата изделия).
Процесс работы для отсоединения механизма блокировки и фиксации инструмента из положения скрепления также требует следующих шести этапов:
1. Установка (для соединения ведущей кулачковой пары).
2. Поворот влево (для отсоединения обсадной колонны и разблокирования инструмента).
3. Подхват (для обеспечения отскакивания фиксатора).
4. Поворот вправо (для хода назад ведущей кулачковой пары).
5. Установка (установка для соединения ведущей кулачковой пары).
6. Поворот влево (для втягивания компоновки захвата и инструмента с фиксатором).
Если начинать от соединения ведомой кулачковой пары, требуется один следующий дополнительный этап:
1a. Поворот вправо для соединения ведущей кулачковой пары, затем переход к этапу 1.
Из вышеописанной процедуры ясно, что дополнительные этапы уменьшают риск случайного отсоединения посредством увеличения сложности эксплуатации.
На Фиг. 7A показана архитектура с тремя кулачковыми муфтами с встроенным механическим фиксатором на схеме с двумерным представлением, как она должна выглядеть с соединенным фиксатором. Компоновка с тремя кулачковыми муфтами с блокировкой имеет ведущую кулачковую муфту 12, ведомую кулачковую муфту 13, промежуточную кулачковую муфту 14 и фиксатор 40. Кулачковая пара 47 фиксатора выполнена с возможностью действия между корпусом 41 фиксатора и ведущей кулачковой муфтой 12 и образована, в общем, крюками 44 фиксатора стыкующегося профиля. Профиль 45 крюка фиксатора на корпусе 41 фиксатора включает в себя упор 61 блокировки на верхней стороне 62, и профиль 45 крюка фиксатора ведущей кулачковой муфты 12 имеет, в общем, стыкующееся гнездо 63 под упор блокировки на нижней стороне 64 и свободное пространство для упора блокировки на верхней стороне 69. Углы граней 65 и 66 упоров блокировки выбирают совместно с углами граней 67 и 68 гнезд под упор блокировки и геометрией шпоночных пазов 42 для осуществления соединения блокировки, отсоединения блокировки и высвобождения корпуса фиксатора во время скрепления. Шпоночные пазы 42 корпуса 41 фиксатора и шпонки 43, жестко прикрепленные к ведомой кулачковой муфте 13, имеют пару 70 граней блокировки, состоящих, в общем, из стыкующихся граней 71 и 72 блокировки. Угол граней 71 и 72 блокировки выбирают совместно с углом несущих нагрузку резьб 20 для исключения случайного высвобождения блокировки вследствие вибрации и уменьшения неопределенности положения соединения упора 61 блокировки на подошве профиля 45 крюка фиксатора ведущей кулачковой муфты 12. Ведомая кулачковая муфта 13 имеет пружину 73 сжатия с ограничением хода, предварительно напряженную, когда фиксатор 40 отсоединяют, отклоняющая пружина 46 толкает грань 74 корпуса 41 фиксатора в контакт с упором 75 пружины. Коэффициент жесткости и предварительное напряжение сжимающей пружины 73 выбирают совместно с коэффициентом жесткости и предварительным напряжением отклоняющей пружины 46 так, что пружина 73 не сжимается после начального положения предварительного напряжения под нагрузкой отклоняющей пружины 46 и любыми нештатными нагрузками, включающими в себя вес компонента.
На Фиг. 7B показана компоновка с кулачковыми муфтами Фиг. 7A на схеме с двумерным представлением, как она должна выглядеть с отсоединенным фиксатором и гранями крюков фиксаторов в контакте, сжимающая пружина 73 остается полностью выдвинутой, и контакт с корпусом 41 фиксатора устанавливает его так, что грани крюка профиля 45 крюка фиксатора имеют нахлест и скользящее соединение. Шпонки 43 установлены в винтообразной секции 77 шпоночного паза 42 так, что правое вращение должно обуславливать отсоединение профиля крюка фиксатора и левое вращение должно обуславливать винтообразное скольжение корпуса 41 фиксатора на шпоночных пазах 42 и соединение крюка профиля 45 крюка фиксатора выдвижением отклоняющей пружины 46 для установки компоновки в положение, показанное в на Фиг. 7A.
На Фиг. 7C показана компоновка с кулачковыми муфтами Фиг. 7A на схеме с двумерным представлением, как она должна выглядеть с отсоединенным фиксатором и с приложением левого крутящего момента, с соединенными винтообразными наклонными поверхностями 23 несения нагрузки ведомой кулачковой пары 16 и соединенными винтообразными поверхностями 19 наклонных упоров и стыкующимися поверхностями 18 упоров ведущей кулачковой пары 15.
На Фиг. 7D показана компоновка с кулачковыми муфтами Фиг. 7A на схеме с двумерным представлением, как она должна выглядеть под действием сжимающей нагрузки после соединения ведомой кулачковой пары 16. Все стыкующиеся грани как ведущей кулачковой пары 15, так и ведомой кулачковой пары 16 соединены и компоновка 10 с кулачковыми муфтами находится под действием сжатия. Грань 74 корпуса 41 фиксатора соединена с упором 75 пружины, и сжимающая пружина 73 сжата за положением предварительного напряжения. Шпонки 43 установлены в винтообразной секции 77 шпоночного паза 42. Упор 61 блокировки соединен с гнездом 63 под упор блокировки. Приложение правого вращения к ведущей кулачковой муфте должно перемещать корпус 41 фиксатора в положение блокировки, приводящее грани 71 и 72 пары 70 блокировки в соединение.
На Фиг. 7E показана компоновка с кулачковыми муфтами Фиг. 7A на схеме с двумерным представлением, как она должна выглядеть с разблокированным фиксатором 40 и ведущей кулачковой муфтой 12 и корпусом 41 фиксатора, установленными для отсоединения блокировки с приложением левого вращения относительно ведомой кулачковой муфты 13. Подошва профиля 45 фиксатора ведущей кулачковой муфты 12 скользяще соединена с гранью 65 упора 61 блокировки, и левое вращение по шагу ведущей кулачковой муфты должно давать, в результате, аналогичное перемещение корпуса 41 фиксатора относительно ведомой кулачковой муфты 13 и промежуточной кулачковой муфты 14, следующее за ним рабочее аксиальное перемещение ведущей кулачковой муфты 12 должно обуславливать перемещение шпонки 43 из секции 76 блокировки в винтообразную секцию 77 шпоночного паза 42.
На Фиг. 7F показана компоновка с кулачковыми муфтами Фиг. 7A на схеме с двумерным представлением, как она должна выглядеть разблокированной и с приложением правого вращения к ведущей кулачковой муфте 12 относительно ведомой кулачковой муфты 13 и промежуточной кулачковой муфты 14. Понятно, что, как показано, в разблокированном положении как ведущая кулачковая пара 15, так и ведомая кулачковая пара 16 могут являться действующими.
Теперь должно быть ясно, что архитектура с встроенной механической блокировкой настоящего изобретения хорошо приспособлена для остановки случайной фиксации в архитектуре с тремя кулачковыми муфтами настоящего изобретения вследствие уменьшения вероятности дополнительных этапов, требующихся в последовательности фиксации, происходящей случайно.
Понятно, что фиксатор можно блокировать рядом средств, включающих в себя, не в качестве ограничения, механические и гидравлические средства.
Аналогично, можно создавать другие устройства фиксации между ведущей кулачковой муфтой 12 и ведомой кулачковой муфтой 13. Одна такая конфигурация (не показано) отклоняет кольцо 41 фиксатора в нормально выдвинутое положение. При правом вращении кольцо 41 фиксатора стремится вытолкнуть крюки 44 фиксатора из положения соединения. Крюки фиксатора имеют форму и распределение для предотвращения частичного соединения в промежуточных положениях при вращении (на одном повороте или меньше), где должно иначе возникать частичное соединение, предотвращающее левое вращение, что обеспечивает шаг несущей нагрузку резьбы 20 и выбранную высоту крюков 44 фиксатора.
Теперь должно быть ясно, что архитектура с тремя кулачковыми муфтами и с фиксацией настоящего изобретения хорошо приспособлена к созданию дополнительного радиального хода, что может являться предпочтительным с внешними захватывающими инструментами, такими как показан на Фиг. 1, где, например, такое является обычно необходимым для захвата соединенных трубных изделий в диапазоне размеров ниже соединительной муфты.
Архитектура с тремя кулачковыми муфтами захватывающего внутри (с внутренним захватом) инструмента спуска трубных изделий
На Фиг. 8-13B показан, описываемый ниже, предпочтительный вариант осуществления улучшенного захватывающего инструмента, именуемого в данном документе "инструмент спуска трубных изделий с внутренним захватом с архитектурой с тремя кулачковыми муфтами". На Фиг. 8 показан внешний вид инструмента спуска трубных изделий предпочтительного варианта осуществления, в общем, обозначенного позицией 100 и показанного, как он должен выглядеть в конфигурации с фиксатором, имеющим компоновку 110 корпуса и компоновку 120 элемента захвата.
На Фиг. 9, показан вид сечения инструмента 100 спуска трубных изделий, как он должен выглядеть в конфигурации с фиксатором внутри и установленным на одном радиусе с ближним концом 101 изделия 102. Инструмент 100 спуска трубных изделий выполнен на верхнем конце 105 для соединения с полым валом верхнего привода, или нижним концом колонны компонентов привода, к которому прикрепляется (не показано) несущим нагрузку переходником 112, встроенным в шпиндель 130 так, что шпиндель 130 действует, как основной корпус инструмента 100 спуска. Несущий нагрузку переходник 112 является, в общем, осесимметричным и выполнен из материала подходящей прочности. Он имеет верхний конец 121, выполненный с внутренней резьбой 122, подходящей для герметичного соединения с полым валом верхнего привода, с внутренним сквозным каналом 123, продолжающим канал шпинделя 130.
Также показанный на Фиг. 9 инструмент 100 спуска трубных изделий имеет компоновку 110 корпуса, состоящую из удлиненного, в общем, цилиндрического шпинделя 130, имеющего верхний конец 131, нижний конец 132 с внешними поверхностями 133 в форме усеченного конуса, и внутренний канал 136. Шпиндель 130 имеет резьбу 134 на корпусе и шлицевой элемент 135 на верхнем конце 131. Инструмент 100 спуска трубных изделий снабжен стопорным кольцом 140, имеющим шлицевую секцию 142 на нижнем конце 141. Стопорное кольцо 140 показано здесь имеющим, в общем, трубную внешнюю муфту 184, находящуюся снаружи несущего нагрузку переходника 112, и плотно закрепленную на нем, где внешняя муфта 184 создана для защиты несущего нагрузку переходника 112 от повреждения трубным ключом. Шпиндель 130 несет внутреннюю аксиально включаемую в работу компоновку 120 захвата, имеющую удлиненный и, в общем, цилиндрический нижний конец 109, вставляемый в верхний ближний конец 101 трубного изделия 102 и коаксиально размещаемый в нем. Компоновка 120 захвата состоит из кожуха 144, с верхним концом 145 и нижним концом 146, имеющего резьбовой элемент 147 на нижнем конце 146, аксиального удерживающего паза 148 и множества радиально ориентированных окон 149, размещенных по окружности на нижнем конце 146, в которых расположены челюсти 160. В общем, удлиненные челюсти 160, с верхним концом 161, нижним концом 162, внутренней поверхностью 163, внешней поверхностью захвата 164 и параллельными сторонами (не показано), имеют множество контактных граней 166 в форме усеченного конуса на внутренней поверхности 163, соединяющихся со стыкующимися с ними поверхностями 133 в форме усеченного конуса шпинделя 130, образующими стык 114 клинового захвата, действующих для создания радиального хода челюстей 160 в ответ на аксиальное приведение в действие.
Как также показано на Фиг. 9, инструмент 100 спуска трубных изделий имеет двухповоротный механизм 200 управления с приведением в действие аксиальным ходом с тремя кулачковыми муфтами с фиксацией, в общем выполненный с архитектурой с тремя кулачковыми муфтами, и включает в себя ведущую кулачковую муфту 220, ведомую кулачковую муфту 260 и промежуточную кулачковую муфту 240. Механизм 200 управления действует между шпинделем 130 и компоновкой 120 захвата и состоит из компоновки 180 корпуса, включающей в себя ведомый и ведущий кулачковые кожухи 181 и 182, соответственно. Механизм 200 управления с тремя кулачковыми муфтами с фиксацией функционирует и устроен, в общем, как описано выше и показано на схемах Фиг. 3-4C и 6A-6C.
На Фиг. 10A показан механизм 200 управления в конфигурации с фиксатором, компоновка которого снабжена ведущей кулачковой муфтой 220 с верхним концом 222. Как показано на Фиг. 10B на виде сечения компоновки 200 с тремя кулачковыми муфтами в конфигурации с фиксатором, компоновка 200 с тремя кулачковыми муфтами имеет ведущую кулачковую муфту 220 с нижним концом 223, внешней поверхностью 224 и внутренней поверхностью 225, и одним или несколькими выступами 226 передачи крутящего момента (здесь показано восемь) на верхнем конце 222. Внутренняя поверхность 225 ведущей кулачковой муфты 220 имеет резьбовой элемент 227 на верхнем конце 222 и уплотняющий элемент 228 на нижнем конце 223. Как также показано на Фиг. 9, резьбу 134 корпуса на шпинделе 130 свинчивают с резьбовым элементом 227 на ведущей кулачковой муфте 220, а уплотняющий элемент 228 герметично соединяют с внешней поверхностью шпинделя 130. Шлицевая секция 142 стопорного кольца 140 сцепляется как с выступами передачи крутящего момента (не видны на данном виде секции, но показаны на Фиг. 10B позицией 226) на ведущей кулачковой муфте 220, так и с шлицевым элементом 135 на шпинделе 130 так, что ведущая кулачковая муфта 220 структурно и жестко прикреплена к шпинделю 130 и предотвращено ее перемещение, как аксиальное, так и по окружности, относительно шпинделя 130. Как также показано на Фиг. 10B, нижняя сторона 229 ведущей кулачковой муфты 220 содержит повторяющиеся крюки 230 фиксатора. Внешняя поверхность 224 ведущей кулачковой муфты 220 содержит множество несущих нагрузку резьб 231 на нижнем конце 223. Несущие нагрузку резьбы 231, в общем, состоят из упорной резьбы с несущей нагрузку боковой стороной 233 профиля резьбы и направляющей боковой стороной 234 профиля резьбы. Ведущая кулачковая муфта 220 имеет уплотняющий элемент 236 на внешней поверхности 224 на верхнем конце 222. Как также показано на Фиг. 10A, ведущая кулачковая муфта 220 имеет поверхности 232 упоров и поверхности 237 наклонных упоров, размещенные на обращенной вниз внешней поверхности 224 уступа 296 на верхнем конце 222.
Как также показано на Фиг. 10A, промежуточная кулачковая муфта 240 с верхним концом 241, нижним концом 242, внутренней поверхностью (не показано) и внешней поверхностью 244 имеет одну или несколько поверхностей 245 упоров (показано здесь три) на верхнем конце 241, соединяющихся с поверхностями 232 упоров на верхнем конце 222 ведущей кулачковой муфты 220, вместе образующих пару 255 поверхностей упоров. Также на верхнем конце 241 промежуточной кулачковой муфты 240 находятся одна или несколько (показано три) поверхностей 256 наклонных упоров, которые стыкуются скользящим соединением с поверхностями 237 наклонных упоров ведущей кулачковой муфты 220, вместе образуя пары 257 поверхностей наклонных упоров. Как также показано на Фиг. 10B, промежуточная кулачковая муфта 240 имеет воспринимающие нагрузку резьбы 246 (показаны здесь как форма многозаходной резьбы с шагом резьбы, совпадающим с шагом винтовой линии поверхностей 256 наклонных упоров) на внутренней поверхности 243 на верхнем конце 241, при этом данные резьбы выполнены как толкающие резьбы с несущей нагрузку боковой стороной 247 профиля резьбы и направляющей боковой стороной 248 профиля резьбы и стыкуются скользящим соединением с несущей нагрузку резьбой 231 ведущей кулачковой муфты 220, образуя несущую нагрузку резьбовую пару 268 и, таким образом, объединяясь с парой 255 поверхностей упоров и парой 257 поверхностей наклонных упоров, вместе образуя ведущую пару 249 кулачковой муфты 249. На Фиг. 10A промежуточная кулачковая муфта 240 имеет одну или несколько (здесь показано шесть) винтообразных поверхностей 250 несущих нагрузку наклонных участков, размещенных примыкающими к равному числу несущих нагрузку поверхностей 251 упоров и находящихся на одном радиусе с ними, на нижнем конце 242.
Как также показано на Фиг. 10A, ведомая кулачковая муфта 260 с верхним концом 261, нижним концом 262 и внешней поверхностью 263 имеет множество винтообразных несущих нагрузку поверхностей 265 наклонных участков, размещенных примыкающими к поверхностям 266 упоров, воспринимающих нагрузку и находящихся на одном радиусе с ними на верхнем конце 261. Винтообразные поверхности 265 наклонных участков, несущих нагрузку, и поверхности 266 упоров, несущих нагрузку, ведомой кулачковой муфты 260 стыкуются скользящим соединением с винтообразными поверхностями 250 наклонных участков, несущих нагрузку, и поверхностями 251 упоров, несущих нагрузку, промежуточной кулачковой муфты 240, вместе образуя ведомую кулачковую пару 267. Как показано на Фиг. 10B, ведомая кулачковая муфта 260 имеет один или несколько выступов 269 передачи крутящего момента, в данном случае двенадцать (12), на нижней стороне 270 на нижнем конце 262. Как показано на Фиг. 9, выступы 269 передачи крутящего момента ведомой кулачковой муфты 260 стыкуются с выступами 143 передачи крутящего момента на верхнем конце 145 кожуха 144 и в данном варианте осуществления соединены вместе болтами в отверстиях 297 под болты (болты не показаны) для структурного и жесткого соединения ведомой кулачковой муфты 260 с кожухом 144. Как также показано на Фиг. 10B, на внутренней поверхности 264 на нижнем конце 262 ведомой кулачковой муфты 260 имеется уплотняющий элемент 273 и обращенный вверх уступ 274, а на внешней поверхности 263 на нижнем конце 262 имеется уплотняющий элемент 275.
Как также показано на Фиг. 10B, компоновка 200 кулачковых муфт имеет, в общем, в форме трубного изделия, кольцо 300 фиксатора с верхним концом 301, нижним концом 302, и внутренней поверхностью 303. На Фиг. 11 показана компоновка ведущей кулачковой муфты 220, кольцо 300 фиксатора и шпонки 290 фиксатора, кольцо 300 фиксатора имеет множество винтообразных гнезд 305 шпонок фиксатора (здесь показано шесть), которые могут быть равномерно разнесены по окружности на внешней поверхности 304. Гнезда 305 шпонок фиксатора имеют внутренние грани 306, несущие грани 307, и винтообразные грани 309 и 310 скольжения кулачков. Внутренняя грань 306 гнезда 305 шпонки фиксатора имеет паз 308 свободного пространства под штифт, проходящий к внутренней поверхности 303 кольца 300 фиксатора. Как также показано на Фиг. 10B, на нижнем конце 302 кольца 300 фиксатора на внутренней поверхности 303 имеется обращенный вверх уступ 315. Верхняя сторона 312 на верхнем конце 301 кулачкового кольца 300 фиксатора имеет повторяющиеся крюки 313 фиксатора. Крюки 313 фиксатора на кулачковом кольце 300 фиксатора стыкуются с крюками 230 фиксатора на нижней стороне 229 ведущей кулачковой муфты 220, вместе образуя пару 314 крюков фиксатора, крюки 230 и 313 фиксатора выбирают так, что при соединении пара 314 крюков фиксатора предотвращает относительные аксиальные перемещения ведомой кулачковой муфты 260 и ведущей кулачковой муфты 220.
Как также показано на Фиг. 11A, кольцо 300 фиксатора скомпоновано так, что шпонки 290 фиксатора размещены внутри гнезд 305 шпонок фиксатора. На Фиг. 11B показан, частично в разрезе, вид части компоновки с кулачковыми муфтами, включающей в себя ведомое кулачковое кольцо 260, кольцо 300 фиксатора, штифты 337 фиксатора, шпонки 290 фиксатора и пружинные элементы 346 и 349, штифты 337 фиксатора и проушины 338 фиксатора (не показано на данном виде) жестко прикреплены к ведомой кулачковой муфте 260 и проходят через кулачковую муфту для скользящего соединения с отверстиями 291 под срезные штифты в шпонках 290 фиксатора. Как показано на 10A, радиально сориентированный штифт 337 фиксатора в объединении с радиально сориентированной проушиной 338 фиксатора, которая не совмещена в радиальной плоскости с штифтом 337 фиксатора, совместно ограничивают перемещение шпонки 290 фиксатора относительно ведомой кулачковой муфты 260 так, что перемещение кольца 300 фиксатора ограничено винтообразным перемещением относительно ведомой кулачковой муфты 260 на величину, образованную относительной разницей аксиальной длины между, как показано на Фиг. 11A, шпонкой 290 фиксатора и гнездом 305 шпонки фиксатора. Также, как показано на Фиг. 11B, штифты 337 фиксатора с внутренними концами 339 выдвигаются через паз 308 свободного пространства в гнезда 305 шпонок фиксатора, и скользяще соединяются с отверстиями 323 под штифты удерживающего кольца в удерживающем кольце 320 и вместе ограничивают перемещение удерживающего кольца 320 относительно ведомого кулачкового кольца 260. Также, как показано на Фиг. 11A, скомпонованные несущие нагрузку грани 293 шпонки 290 фиксатора и несущие нагрузку грани 307 кольца 300 фиксатора вместе образуют пару 315 несущих нагрузку граней, когда при работе фиксатора аксиальная нагрузка передается от ведомой кулачковой муфты 220 (не видно на данном виде) на кольцо 300 фиксатора через пару 315 несущих нагрузку граней. Винтообразные скользящие кулачовые грани 296 и 297 шпонок 290 фиксатора и винтообразные кулачковые грани 309 и 310 кольца 300 фиксатора вместе образуют пары 317 и 318 винтообразных скользящих кулачковых граней, соответственно, так что когда шпонки 290 фиксатора перемещаются вверх или вниз относительно кольца 300 фиксатора, пары 317 или 318 кулачковых граней соответственно соединяются. На Фиг. 11C показана часть компоновки, включающая в себя ведущую кулачковую муфту 220, кольцо 300 фиксатора и шпонки 290 фиксатора, как она должна выглядеть при начальном правом вращении ведущей кулачковой муфты 220, кольцо 300 фиксатора проталкивается вниз к показанному положению, где крюки 314 еще имеют небольшой нахлест 316 для осуществления повторной фиксации под действием левого вращения, как показано на Фиг. 6B и описано выше, но не мешают под действием последующего правого вращения обуславливать аксиальный ход, ограниченный перемещением вдоль несущей нагрузку резьбы 231. Также, как показано на Фиг. 10B, компоновка 200 с тремя кулачковыми муфтами может иметь пружинный элемент 346, в данном случае, спиральную пружину, размещенную внутри кольца 300 фиксатора и работающую на сжатие между удерживающим пружину кольцом 320 и кольцом 300 фиксатора, так что пружинный элемент 346 обычно работает совместно с силой тяжести и функционирует, отклоняя кольцо 300 фиксатора в аксиальное нижнее положение.
Также, как показано на Фиг. 9, компоновка 200 с тремя кулачковыми муфтами размещена внутри компоновки 180 кулачкового кожуха, состоящей из кожуха 181 ведомой кулачковой муфты, жестко прикрепленного к ведомой кулачковой муфте 260 и герметично соединенного с уплотняющим элементом 275, и кожуха 182 ведущей кулачковой муфты, жестко прикрепленного к ведущей кулачковой муфте 220 и герметично соединенного с уплотняющим элементом 236, при этом компоновки 180 кожуха создают герметичную камеру 183 кулачковой муфты, обеспечивающую добавление сжатого газа в камеру 183, функционирующую, как пружина, стремящаяся поджимать компоновку 122 захвата в соединение с изделием 102 после отсоединения фиксатора 295.
На Фиг. 10A на внешнем виде компоновки 200 с тремя кулачковыми муфтами показано, как должна выглядеть компоновка в фиксированном положении, где ведущая кулачковая муфта 220, ведомая кулачковая муфта 260 имеют минимальный аксиальный разнос, так что ведущая кулачковая пара (не показано), пара 255 поверхностей упоров и пара 257 поверхностей наклонных упоров ведущей и промежуточной кулачковых муфт 220 и 240, соответственно, соединены, и ведомая кулачковая пара 267 промежуточной и ведомой кулачковых муфт 240 и 260, соответственно, соединены. На Фиг. 10B показан вид сечения компоновки 10 с тремя кулачковыми муфтами в конфигурации с фиксатором, снабженной кольцом 300 фиксатора, фиксатор 295 которой размещен внутри и на одном радиусе с компоновкой 200 с тремя кулачковыми муфтами и описан выше и показан на Фиг. 6A-6C. Фиксатор 295 создает средство для предотвращения свободного аксиального разведения ведущей и ведомой кулачковых муфт 220 и 260, соответственно.
На Фиг. 12A показан внешний вид компоновки 200 с тремя кулачковыми муфтами, как она должна выглядеть с приложением правого крутящего момента, ведущая кулачковая пара 249 сцеплена и ведущая кулачковая муфта 220 прошла две трети оборота относительно ведомой кулачковой муфты 260 и промежуточной кулачковой муфты 240. Несущая нагрузку пара 268 поверхностей упоров и ведомая кулачковая пара 267 находятся в зацеплении, реагируя как на аксиальную, так и на крутильную нагрузку между ведомой и промежуточной кулачковыми муфтами 260 и 240, соответственно. На Фиг. 12B показан вид сечения компоновки 200 с тремя кулачковыми муфтами, как она должна выглядеть с приложением правого крутящего момента, как описано выше и показано на Фиг. 12A. Фиксатор 295 отсоединен и кольцо 300 фиксатора находится в нижнем положении, смещенное силой тяжести (в данной ориентации) и пружинным элементом 346 так, что нижняя часть 302 кольца 300 фиксатора соединена на пружинном элементе 349. Пружинный элемент 349 является относительно жесткой пружиной, в данном варианте стопкой тарельчатых пружин, состоящей из трех тарельчатых пружин, расположенных параллельно и предварительно сжатых так, что объединенная сила отклоняющих элементов, действующих на кольцо 300 фиксатора, незначительна относительно предварительного нагружения пружинного элемента 349 и, поэтому, положение пружинного элемента 349 является известным и, следовательно, аксиальное положение смещенного вниз кольца 300 фиксатора также известно. Пружинный элемент 349 функционирует для предотвращения чрезмерного нагружения крюков 314 фиксатора в случае, когда сжимающая нагрузка приложена к компоновке 200 с тремя кулачковыми муфтами только с ограниченным парой крюков 314 фиксатора соединением. Левая винтообразная ведущая кулачковая пара 255, в данном случае в форме американской упорной трапецеидальной резьбы с шестью заходами, обеспечивает вращение, обуславливающее аксиальный ход с превышением одного полного вращения, которое больше, чем возможно с одной кулачковой парой двустороннего вращения, описанной выше и показанной на Фиг. 2A и 2B.
На Фиг. 13A показан внешний вид компоновки 200 с тремя кулачковыми муфтами, как она должна выглядеть с отсоединенным фиксатором 295 и под действием приложения левого крутящего момента, ведомая кулачковая пара 267 соединена, и ведущая и промежуточная кулачковые муфты 220 и 240, соответственно, прошли относительно небольшое вращение относительно ведомой кулачковой муфты 260. Пара 255 поверхностей упоров и пара винтообразных поверхностей наклонных упоров 257 находятся в соединении для реагирования на аксиальные и крутильные нагрузки между ведущей кулачковой муфтой 220 и промежуточной кулачковой муфтой 240. На Фиг. 13B показан вид сечения компоновки 200 с тремя кулачковыми муфтами, как она должна выглядеть с отсоединенным фиксатором 295 и в случае приложения левого крутящего момента, кольцо 300 фиксатора спущено вниз, так что нижняя часть 302 кольца 300 фиксатора находится в контакте с пружинным элементом 349. Для перемещения компоновки 200 с тремя кулачковыми муфтами из фиксированной конфигурации, описанной выше и показанной на Фиг. 9A и 9B, в конфигурацию, показанную на Фиг. 13A и 12B, необходимо вначале приложить правый крутящий момент для отсоединия фиксатора 295, затем приложить аксиальное смещение, достаточное для перемещения крюков 314 фиксатора за пределы перекрывания (см. Фиг. 11B), так что под действием приложенного левого крутящего момента ведомая кулачковая пара 267 должна соединяться без помех от крюков 314 фиксатора. Как также показано на Фиг. 9, аксиальный ход, требуемый для перемещения крюков 314 фиксатора за пределы соединения, выполнен с возможностью попадания в люфт инструмента, т.e. аксиальный ход, требуемый перед возможным соединением компоновки 120 захвата с изделием 102. Правая винтообразная ведомая кулачковая пара 267, в данном случае шестизаходный наклонный участок, создает аксиальный ход и крутильную нагрузку с приложением левого вращения на угол промежуточной кулачковой муфты и также создает свободное аксиальное разведение промежуточной и ведомой кулачковых муфт 240 и 260, соответственно, если фиксатор 295 отсоединен, обеспечивая действие аксиального хода захватывающего инструмента 100 для захвата изделия 102 под действием приложенной аксиальной нагрузки, независимой от вращения.
В данном патентном документе слово "содержащий" использовано в неограничивающем смысле, означающем, что позиции, следующие за словом, включены в состав, но позиции, конкретно не упомянутые, не исключаются. Ссылка на элемент с неопределенным артиклем "a" не исключает возможности присутствия нескольких элементов, если по контексту ясно не требуется наличия одного и только одного элемента.
Специалисту в данной области техники должно быть ясно, что можно выполнять модификации показанных вариантов осуществления без отхода от сущности и объема изобретения, определяемых ниже в данном документе в формуле изобретения.

Изобретение относится к инструменту для захвата и манипуляции трубных изделий. Обеспечивает управление аксиальным и радиальным ходами поверхности захвата инструмента. Захватывающий инструмент имеет поверхность захвата, которую несут подвижные элементы захвата, и механизмы управления для радиального перемещения поверхности захвата из втянутого в выдвинутое положение. Захватывающий инструмент содержит механизмы управления, содержащие, по меньшей мере, один механизм управления с тремя кулачковыми муфтами, который в свою очередь содержит: ведущую кулачковую муфту, получающую входное вращение, стремящуюся к передаче вращения; промежуточную кулачковую муфту, получающую входное вращение исключительно от ведущей кулачковой муфты; ведомую кулачковую муфту, получающую входное вращение исключительно от промежуточной кулачковой муфты; ведущую кулачковую пару, действующую между ведущей кулачковой муфтой и промежуточной кулачковой муфтой так, что входное вращение передается ведущей кулачковой парой от ведущей кулачковой муфты на промежуточную кулачковую муфту, и ведомую кулачковую пару, действующую между промежуточной кулачковой муфтой и ведомой кулачковой муфтой так, что входное вращение от промежуточной кулачковой муфты передается ведомой кулачковой парой на ведомую кулачковую муфту. 9 з.п. ф-лы, 13 ил.
1. Усовершенствованный захватывающий инструмент, имеющий поверхность захвата, которую несут подвижные элементы захвата, и механизмы управления для радиального перемещения поверхности захвата из втянутого в выдвинутое положение, содержащий: механизмы управления, содержащие, по меньшей мере, один механизм управления с тремя кулачковыми муфтами, содержащий: ведущую кулачковую муфту, получающую входное вращение, стремящуюся к передаче вращения; промежуточную кулачковую муфту, получающую входное вращение исключительно от ведущей кулачковой муфты; ведомую кулачковую муфту, получающую входное вращение исключительно от промежуточной кулачковой муфты; ведущую кулачковую пару, действующую между ведущей кулачковой муфтой и промежуточной кулачковой муфтой так, что входное вращение передается ведущей кулачковой парой от ведущей кулачковой муфты на промежуточную кулачковую муфту, и ведомую кулачковую пару, действующую между промежуточной кулачковой муфтой и ведомой кулачковой муфтой так, что входное вращение от промежуточной кулачковой муфты передается ведомой кулачковой парой на ведомую кулачковую муфту.
2. Инструмент по п.1, в котором механизм управления с тремя кулачковыми муфтами обеспечивает двухповоротное управление аксиальным ходом и радиальный ход поверхности захвата инструмента как функцию аксиального хода.
3. Инструмент по п.2, в котором ведущая кулачковая пара выполнена с возможностью действия, обуславливающего только аксиальный ход, как функцию вращения при первом направлении вращения и ведомой кулачковой пары под действием второго направления вращения, при этом разделение двухповоротного управления на две кулачковые пары обуславливает создание большего аксиального хода и коррелятивно радиального хода поверхности захвата, что возможно при использовании одной кулачковой пары, при двухповоротном механизме управления.
4. Инструмент по п.1, в котором механизм управления с тремя кулачковыми муфтами выполнен с фиксатором, который при соединении предотвращает приведение в действие аксиального хода механизмом управления с тремя кулачковыми муфтами.
5. Инструмент по п.4, в котором механизм управления с тремя кулачковыми муфтами снабжен механической блокировкой, которая при включении в работу предотвращает соединение фиксатора.
6. Инструмент по п.1, в котором захватывающий инструмент имеет несущий нагрузку переходник, и механизм управления с тремя кулачковыми муфтами расположен так, что ведущая кулачковая муфта жестко скреплена с несущим нагрузку переходником и получает входное вращение, стремящаяся к передаче вращения.
7. Инструмент по п.6, в котором механизм управления с тремя кулачковыми муфтами обеспечивает двухповоротное управление аксиальным ходом и радиальный ход поверхности захвата как функцию аксиального хода.
8. Инструмент по п.6, в котором ведущая кулачковая пара выполнена с возможностью действия только обуславливающего аксиальный ход как функцию вращения при первом направлении вращения и ведомой кулачковой пары под действием второго направления вращения, при этом разделение двухповоротного управления на две кулачковые пары обуславливает создание большего аксиального хода и коррелятивно радиального хода поверхности захвата, что возможно при использовании одной кулачковой пары в двухповоротном механизме управления.
9. Инструмент по п.6, в котором механизм управления с тремя кулачковыми муфтами выполнен с фиксатором, который при соединении предотвращает приведение в действие аксиального хода механизмом управления с тремя кулачковыми муфтами.
10. Инструмент по п.9, в котором механизм управления с тремя кулачковыми муфтами снабжен механической блокировкой, которая при включении в работу предотвращает соединение фиксатора.
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДВУХКООРДИНАТНЫЙ ОДНОЗЕРКАЛЬНЫЙ ОПТИЧЕСКИЙ ДЕФЛЕКТОР | 2015 |
|
RU2606520C1 |
| ПРЕДОХРАНИТЕЛЬНАЯ МУФТА | 0 |
|
SU337577A1 |
| Привод трубного ключа | 1973 |
|
SU661101A1 |
| Компенсационная муфта Алмазова | 1983 |
|
SU1126736A1 |
| КЛЮЧ С ЭЛЕКТРОИНЕРЦИОННЫМ ПРИВОДОМ | 1992 |
|
RU2049906C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ТЕПЛОВОГО ИЗЛУЧЕНИЯ В ФОТОЭЛЕКТРИЧЕСКИЕ СИГНАЛЫ | 0 |
|
SU179652A1 |
| ОПРАВКА ДЛЯ ЗАКРЕПЛЕНИЯ ПОРШНЕВЫХ КОЛЕЦ | 2009 |
|
RU2427453C2 |

