Изобретение относится к технике эксплуатации атомных станций и предназначено для извлечения технологического канала из уран-графитовых атомных реакторов типа РБМК-1000 и 1500.
Известно устройство для извлечения технологического канала из канальных атомных реакторов, содержащее механизм захвата канала, резцедержатель, соединенный с приводным шпинделем, кинематически связанным с приводным от двигателя через муфту предельного момента и ручного маховичка червячным механизмом его осевого перемещения, силовой цилиндр подрыва канала и центральную штангу, одним концом жестко соединенную с цилиндром подрыва, а другим с корпусом механизма захвата канала [1]
Недостатком известного устройства является, во-первых, неудобство настройки фрикционной муфты предельного момента на механизме осевого перемещения резцедержателя, объясняемое тем, что двигатель расположен соосно с червячным валом механизма осевого перемещения и для настройки муфты предельного момента необходимо сначала двигатель демонтировать, затем снять ведущую полумуфту, подтянуть или ослабить пружину сжатия полумуфт, причем регулировочные работы при этом выполняются без однозначных критериев, и вновь собрать полумуфту на вал двигателя и смонтировать двигатель с механизмом. Это трудоемкая работа. Во-вторых, при использовании ручного привода этого же механизма маховичок приходится постоянно поджимать в осевом направлении, преодолевая сопротивление пружины, установленной в гнезде торцевой части червячного вала механизма осевого перемещения, а это неудобно, т.к. при вращении маховичка за рукоятку развиваются лишь вращающие усилия, а тут необходимо прикладывать дополнительно и осевые.
Задачей изобретения является создание устройства, свободного от вышеуказанных недостатков, в частности повышение удобства настройки муфты предельного момента и использования ручным приводом механизма осевого вертикального перемещения резцедержателя.
Поставленная задача решается за счет того, что в устройстве для извлечения технологического канала из уран-графитовых атомных реакторов, содержащем механизм захвата канала, резцедержатель, соединенный с приводным шпинделем, кинематически связанным с приводным от двигателя через муфту предельного момента и ручного маховичка червячным механизмом его осевого перемещения, силовой цилиндр подрыва канала и центральную штангу, одним концом жестко соединенную с цилиндром подрыва, а другим с корпусом механизма захвата канала, двигатель механизма осевого перемещения расположен эксцентрично червячному валу и соединен с ним зубчатой передачей, причем обе полумуфты муфты предельного момента расположены на валу двигателя, а ведущая шестерня зубчатой передачи жестко связана с ведомой полумуфтой, при этом на ступице ручного маховичка выполнен фиксатор двух его крайних положений.
При поиске аналогов и прототипа не обнаружены технические решения, сходные и отличительными признаками заявляемого устройства, что доказывает соответствие заявляемой совокупности признаков критерию изобретения "Изобретательский уровень".
Сопоставимый анализ заявляемого изобретения с прототипом позволил выявить отличительные признаки, что доказывает соответствие заявляемой совокупности признаков критерию изобретения "новизна".
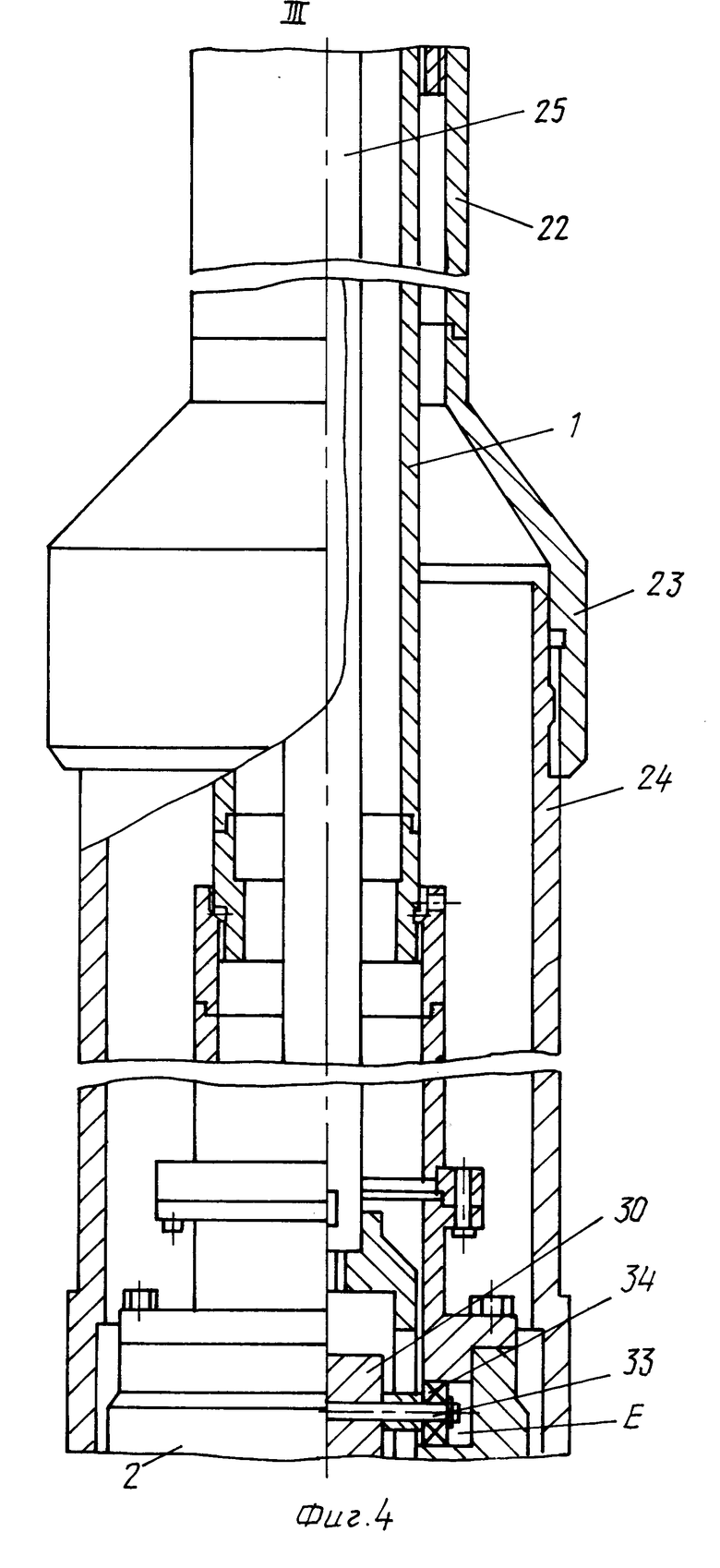
На фиг. 1 показана кинематическая схема устройства для извлечения технологического канала; на фиг. 2 показан узел I с фиг. 1; на фиг. 3 узел II с фиг. 1; на фиг. 4 узел III с фиг. 1; на фиг. 5 узел IV с фиг. 1; на фиг. 6 вид по стрелке А с фиг. 2; на фиг. 7 разрез Б-Б с фиг. 2; на фиг. 8 разрез В-В с фиг. 3; на фиг. 9 узел V с фиг. 5; на фиг. 10 разрез Д-Д с фиг. 9.
Устройство состоит из приводного полого шпинделя 1, соединенного с резцедержателем 2 и механизмом 3 его осевого вертикального перемещения. Шпиндель 1 посредством скользящей шпонки 4 соединен со ступицей 5 червячного колеса 6, установленного с помощью подшипников 7 в корпусе 8 устройства. Червячное колесо 6 находится в зацеплении с приводным от электродвигателя 9 червячным валом 10. Кроме того, на шпинделе 1 с помощью пакета подшипников 11 и 12 неподвижно установлена маточная гайка 13 с наружной ходовой резьбой, находящейся в зацеплении с внутренней резьбой червячного колеса 14, приводимого во вращение червячным валом 15. В корпусе 8 устройства установлен винт 16 с цилиндрическим хвостовиком, сопрягаемым с продольным пазом 17 на наружной поверхности маточной гайки 13 и фиксирующим гайку 13 от поворота относительно корпуса 8 устройства. Корпус 8 устройства нижней частью прикреплен к аксиально расположенному силовому цилиндру 18 подрыва технологического канала 19. В соловом цилиндре 18 имеется торцевая крышка 20 с уплотнительной манжетой и аксиально подвижный вдоль цилиндра поршень 21 также с уплотнительной манжетой, прикрепленный к аксиально подвижному от поршня полому штоку 22, расположенному концентрично шпинделю 1. На конце штока 22 имеется нажимная гильза 23, воздействующая при работе цилиндра подрыва на торец тракта 24 реактора. Верхняя часть корпуса 8 устройства, прикрепленная к цилиндру 18 подрыва, жестко соединена с центральной штангой 25, расположенной концентрично шпинделю 1. Центральная штанга 25 своим противоположным, свободным концом прикреплена к полому корпусу 26 механизма 27 шарикового захвата. В корпусе 26 выполнены радиальные цилиндрические гнезда для размещения в них радиально подвижных шариков 28.
Положением шариков 28 управляет аксиально подвижная цилиндроконическая шайба 29, установленная на размещенной в полости корпуса 26 и, расположенной концентрично корпусу, направляющей цапфе 30. Цилиндроконическая шайба 29 подпружинена относительно цапфы 30 в осевом направлении пружиной 31. Крайнее нижнее положение шайбы 29 на цапфе определено установленным с торца цапфы 30 торцевым креплением 32.
Верхней частью направляющая цапфа 30 кинематически связана с резцедержателем 2. Кинематическая связь выполнена в виде установленного в цапфе поперечного пальца 33, взаимодействующего периферийными частями с выполненным на внутренней части резцедержателя 2 кольцевым пазом "E". Для уменьшения износа на периферийных частях пальца 33 установлены подшипники 34. При этом для осуществления связи пальца 33 с кольцевым пазом "E" резцедержателя 2 в полом корпусе 26 выполнены вертикально направленные радиальные пазы, сквозь которые проходит палец 33. В резцедержателе установлены резцы 35 для срезки сварного усового шва, соединяющего технологический канал 19 с трактом 24 реактора и упор 36. Упор установлен в резцедержателе 2 шарнирно и подпружинен относительно резцедержателя в тангенциальном направлении. В направлении вращения резцедержателя упор 36 должен поворачиваться на шарнире и не препятствовать в дальнейшем осевому перемещению резцедержателя 2. Упор 36 удерживается от поворота в другом направлении штифтом 37. Величина вылета упора 36 от торцевой поверхности резцедержателя в направлении усового шва превышает величину вылета резцов 35. Или иными словами: размер К должен быть меньше размера К1 (фиг, 9). Механизм 3 осевого вертикального перемещения шпинделя 1 имеет ручной привод от маховичка 38, установленного на червячном валу 15. При этом на ступице маховичка 38 выполнен шариковый фиксатор двух его крайних положений для сцепления и расцепления с установленным также на червячном валу нониусом 39 для отсчета глубины резания. Нониус устанавливают на ноль при начале резания. Один оборот маховичка 38 соответствует смещению нониуса 39 на одно деление в угловом направлении по лимбу.
На механизме 3 осевого вертикального перемещения резцедержателя 2 установлен реверсивный двигатель 40 для привода червячного вала 15. При этом двигатель 40 расположен эксцентрично червячному валу 15 и соединен с ним зубчатой передачей 41, состоящей из ведущей и ведомой шестерен. На валу двигателя 40 установлена кулачковая муфта 42 предельного момента, Причем ведущая полумуфта соединена с валом двигателя шпонкой (на черт. не показано), а ведомая посажена на вал свободно, но жестко связана с ведущей шестерней зубчатой передачи 41. Приводная часть от двигателя 40 к червячному валу 15 закрыта защитным фартуком.
Маточная гайка 13 со стороны, противоположной винту 16, имеет цветовой индикатор 42 положения шарикового захвата, а в корпусе 8 устройства в этом месте выполнено окно для визуального наблюдения за срабатыванием шарикового захвата.
На ячейку реактора, у которой предварительно демонтирована групповая и индивидуальная биозащита, извлечена тепловыделяющая сборка и демонтирована обойма верхнего тракта, краном центрального зала наводят данное устройство, устанавливают его торцем корпуса механизма захвата на торец технологического канала в гнезде усового шва.
Устройство работает следующим образом. При вращении маховичка 38 по часовой стрелке вращается червячное колесо 14, связанное ходовой резьбой с неподвижной относительно корпуса 8 маточной гайкой 13 и его вращение преобразуется в поступательное перемещение вниз маточной гайки 13 и через пакет подшипников 11 в поступательное осевое перемещение шпинделя 1 с закрепленным на нем резцедержателем с резцами 35. При этом, резцедержатель своим внутренним кольцевым пазом "E" воздействует на поперечный палец 33 и, соответственно, на направляющую цапфу 30, вызывая их осевое перемещение вместе с цилиндроконической шайбой 29, воздействующей, в свою очередь, на шарики 28. Шарики западают в кольцевую проточку канала 19, а шайба 29 своей цилиндрической поверхностью запирает шарики 28 в гнездах корпуса 26, обеспечивая жесткую связь корпуса 26 механизма захвата устройства с каналом 19. В случае каких-либо заеданий цилиндроконическая шайба 29, преодолевая сопротивление пружины 31, перемещается в осевом направлении по направляющей цапфе 30 и, при нахождении шариками проектного положения, возвращается назад, осуществляя запирание корпуса 26 механизма захвата устройства с каналом 19. При этом цветовой индикатор 42 меняет голубой цвет на красный, а резцедержатель 2 упором 36 садится на торцевую поверхность усового канала 19.
Ускоренное движение подачи резцедержателя до упора в сварной шов осуществляется двигателем 40. При достижении упором 36 шва кулачковая муфта 42 предельного момента отсоединяет двигатель 40 от червячного вала 15. Нониус 39 устанавливают в положение ноль. Маховичок 38 подают в осевом направлении для сцепления с нониусом 39.
Далее в полость силового цилиндра 18 подрыва канала 19 подают рабочую жидкость под давлением. При этом поршень 21 со штоком 22 перемещается вниз до упора нажимной гильзой 23 в торец тракта 24 реактора. Затем усилие подрыва передается через торцевую крышку 20, цилиндр 18, корпус 8 устройства на центральную штангу 25, корпус 26 шарикового захвата и шарики 28 на технологический канал 19.
Вращение шпинделя 1 с резцедержателем 2 осуществляется от двигателя 9 через червячную пару 10, 6 и скользящую шпонку 4. Движение подачи резцедержателя с резцами осуществляется вручную вращением по часовой стрелке маховичка 38, установленного на червячном валу 15. При этом маточная гайка 13, перемещаясь вниз в осевом направлении, через пакет подшипников 11 перемещает и вращающийся шпиндель 1. Отсчет величины подачи резцов производят по нониусу 39. Упор 36, преодолевая сопротивление пружины, поворачивается на шарнире в тангенциальном направлении и не препятствует врезанию резцов в усовый шов канала. При срезке усового шва на глубину проплавления автоматически происходит подрыв технологического канала относительно тракта реактора. При подрыве канала вся система корпус 26 механизма 27 захвата канала 19, резцедержатель 2 со шпинделем 1 и оба приводных механизма вращения шпинделя и его осевой подачи одновременно с каналом 19 перемещаются в вертикальном направлении на величину подрыва.
Устройство стропят на крюк крана центрального зала и вместе с каналом извлекают из ячейки реактора и переносят в бассейн выдержки. Опущенный в бассейн выдержки слой воды канал реверсивным включением привода 40 и вертикальным перемещением шпинделя 1 в верхнее крайнее положение расцепляют с устройством для извлечения технологического канала. При этом цветовой индикатор меняет красный цвет на голубой. Далее устройство переносят либо в зону технического обслуживания, либо на следующий канал.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ТЕХНОЛОГИЧЕСКОГО КАНАЛА ИЗ УРАН-ГРАФИТОВЫХ АТОМНЫХ РЕАКТОРОВ | 1996 |
|
RU2086014C1 |
| РЕЗЦОВАЯ ГОЛОВКА ДЛЯ ВЫРЕЗКИ ДИСКОВ В МЕТАЛЛИЧЕСКИХ ЛИСТАХ | 2001 |
|
RU2197362C2 |
| Полуавтоматический станок для механической обработки полусферических изделий из взрывчатых веществ | 1967 |
|
SU1841277A1 |
| ПЕРЕНОСНОЙ СТАНОК ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ | 1998 |
|
RU2144449C1 |
| Устройство для разжима брусков хона | 1977 |
|
SU722741A2 |
| Протяжной станок для обработки кольцевого паза в деталях типа дисков | 1983 |
|
SU1138266A1 |
| Устройство для вывода гибкого длинномерного элемента контролирующей системы ядерного реактора | 1984 |
|
SU1269423A1 |
| Устройство для токарной обработки | 1984 |
|
SU1154052A1 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU770736A1 |
| Револьверная головка | 1989 |
|
SU1763098A1 |








Использование: при срезке усового шва, подрыве и извлечении технологического канала из уран-графитовых атомных реакторов типа РБМК - 1000 и 1500. Сущность: устройство содержит механизм захвата канала, резцедержатель, соединенный с приводным шпинделем и механизмом его осевого перемещения, силовой цилиндр подрыва канала и центральную штангу одним концом жестко соединенную с цилиндром подрыва, свободным концом прикрепленную к корпусу механизма захвата. Устройство снабжено реверсивным двигателем ускоренного осевого перемещения резцедержателя, расположенным эксцентрично червячному валу механизма осевого перемещения и соединенным с червячным валом механизма осевого перемещения зубчатой передачей через кулачковую муфту предельного момента. При этом ведущая шестерня зубчатой передачи жестко связана с ведомой полумуфтой. Ручной привод механизма вертикального перемещения имеет два фиксированных положения. 10 ил.
Устройство для извлечения технологического канала из уран-графитовых атомных реакторов, содержащее механизм захвата канала, резцедержатель, соединенный с приводным шпинделем, кинематически связанным с приводным от двигателя через муфту предельного момента и ручного маховичка червячным механизмом его осевого перемещения, силовой цилиндр подрыва канала и центральную штангу, одним концом жестко соединенную с цилиндром подрыва, а другим с корпусом механизма захвата канала, отличающееся тем, что двигатель механизма осевого перемещения расположен эксцентрично червячному валу и соединен с ним зубчатой передачей, причем обе полумуфты муфты предельного момента расположены на валу двигателя, а ведущая шестерня зубчатой передачи жестко связана с ведомой полумуфтой, при этом на ступице ручного маховичка выполнен фиксатор двух его крайних положений.
| Швец А.Я., Кузнецов А.Г | |||
| Ремонт атомных реакторов | |||
| - М.: Энергоиздат, 1982, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |

