Предлагаемое изобретение относится к машинам для упаковки штучных предметов, преимущественно к устройствам для укладки консервных банок в ящики.
Известно устройство, содержащее питатель изделий, ротор с радиальными захватами, укрепленный на горизонтальном валу, и опору для тары. Радиальные захваты смонтированы на дополнительных валах, установленных параллельно оси ротора с возможностью сложного прерывистого движения [1].
Основным недостатком устройства является его невысокая надежность в работе из-за больших инерционных нагрузок, возникающих при холостых движениях захватов (при выходе их из ящика и возвращении в исходное положение).
Наиболее близким по технической сущности к заявляемому является устройство, содержащее питатель предметов, ротор, укрепленный на горизонтальном валу, дополнительные валы и захваты для предметов. Дополнительные валы укреплены на роторе параллельно его валу и снабжены приводом периодического вращения. Концы дополнительных валов выполнены в виде консолей, расположенных за пределами торца вала ротора. Захваты жестко закреплены на концах дополнительных валов [2].
Одним из основных недостатков устройства, принятого за прототип, также является ненадежность в работе. Объясняется это тем, что в процессе работы устройства, в моменты начала и окончания вращения захвата относительно ротора имеют место жесткие удары, поскольку в эти моменту угловая скорость захвата мгновенно изменяется соответственно от нуля до определенного постоянного значения, и наоборот (уменьшается от постоянного значения до нуля). Величина постоянной угловой скорости захвата относительно ротора составляет ωз = i•ωp, где ωз - угловая скорость захвата, рад/с;
i - передаточное число между зубчатым сектором и шестерней, определяемое из условия бесконтактного выхода захвата из ящика (предпочтительное значение от 4 до 5); ωp - угловая скорость ротора, рад/с. Так, в машине с четырьмя захватами (m = 4) при схеме укладки 3 х 4 банки в слое (Z = 12) и производительности 288 банок/мин (Q = 288 банок/мин) мгновенное изменение угловой скорости захвата составит:
ωз = i • 2 • π • Q: (60 • m • Z) = 5•2•3,14•288: (60•4•12)=3,14 рад/с.
Задачей настоящего изобретения является уменьшение ударных нагрузок и повышение производительности устройства.
Решение поставленной задачи достигается тем, что в устройстве для укладки штучных предметов, содержащем питатель предметов, укрепленный на горизонтальном валу ротор, дополнительные валы, установленные с возможностью сложного прерывистого движения, концы которых выполнены в виде консолей, и захваты для предметов, каждый захват кинематически связан с соответствующим дополнительным валом, при этом кинематическая связь включает выходной валик и зубчатую передачу, в частности, пару некруглых зубчатых колес, из которых ведущее колесо укреплено, преимущественно, на консольном конце дополнительного вала, а ведомое - на выходном валике, при этом захват для предметов жестко укреплен на свободном конце выходного валика.
Сопоставительный анализ показывает, что заявленное устройство отличается от прототипа иной связью захватов с дополнительными валами, которая в компоновке каждого захвата включает пару некруглых зубчатых колес и вспомогательный вал.
Введение некруглых зубчатых колес, например, эллиптических, овальных и т. д. , в связь захватов с дополнительными валами позволит реализовать более благоприятный закон изменения скорости захватов, характеризующийся малым мгновенным значением ее в моменты начала и конца движения. В результате на границах интервалов движения захватов будет уменьшено ускорение и соответствующие ему ударные нагрузки, что позволит повысить надежность работы устройства, уменьшить его внецикловые простои и повысить производительность, не прибегая к интенсификации процесса укладки. Так, применение пары овальных зубчатых колес с максимальным передаточным числом iо.к. = 2,5 (например, с начальными радиусами центроид соответственно для ведущего колеса r1 = 34 мм и для ведомого r2 = 85 мм) позволит при заданных выше условиях вести вращение захватов с мгновенной скоростью на границах интервалов движения
ωз.п.= ωд.в.:io.к.= ωз:(r2:r1) = 3,14:(85:34)=1,25 рад/с,
где ωз.п. - угловая скорость захвата предлагаемого устройства в моменты начала и конца его движения; ωд.в. - угловая скорость дополнительного вала (для прототипа ωз = ωд.в. = const).
Следовательно, мгновенная скорость захватов предлагаемого устройства в моменты начала и конца их движения в 2,5 раза меньше, чем у прототипа.
Предлагаемое устройство для укладки штучных предметов поясняется чертежами, где на:
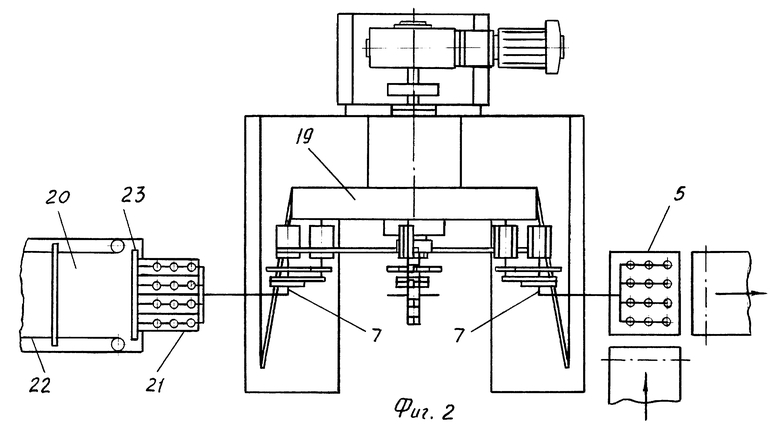
- фиг. 1 изображено устройство, вид спереди;
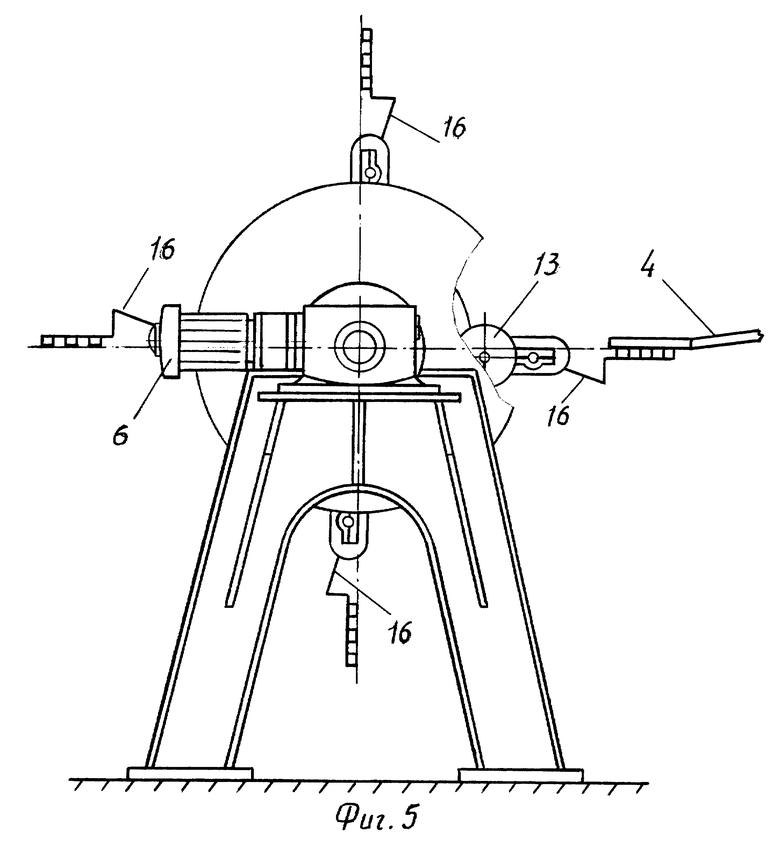
- фиг. 2 - то же, вид сверху;
- фиг. 3 - то же, вид слева;
- фиг. 4 - то же, вид справа;
- фиг. 5 - то же, вид сзади;
- фиг. 6 - механизм захвата.
Устройство содержит ротор 1, укрепленный на горизонтальном валу 2, с радиальными захватами 3, питатель 4 предметов, опору 5 для тары и привод 6.
Каждый захват 3 смонтирован на конце расположенного параллельно валу 2 ротора 1 выходного (ведомого) валика 7, выполненного в виде консоли, выходящей за пределы торца дополнительного вала 8. Конец вала 8 представляет собой консоль, выступающую за пределы торца вала 2 ротора 1. На консольном конце жестко закреплено ведущее зубчатое колесо 9 некруглой формы, взаимодействующее с ведомым колесом 10 некруглой формы, жестко закрепленным на выходном валике 7, на другом конце дополнительного вала 8 смонтированы фиксатор 11 для взаимодействия с тормозным диском 12 и шестерня 13 для взаимодействия с зубчатым сектором 14, при этом тормозной диск закреплен на опоре 15 вала 2 ротора 1, а зубчатый сектор 14 смонтирован на тормозном диске.
Захват 3 выполнен вилкообразным и посредством U-образного стержня 16 жестко закреплен на конце выходного валика 7, относительно оси которого оба плеча стержня расположены перпендикулярно. Пальцы захвата 3 расположены относительно несущего плеча стержня 16 под прямым углом, взаимное расположение плеч стержня 16 таково, что пальцы в рабочем положении захвата направлены нормально к поверхности ротора 1. Такая компоновка стержня и захвата обеспечивает возможность свободного прохода последнего в ящик при укладке банок и свободного выхода из ящика при совершении холостого хода (т.е. при вращении относительно оси вспомогательного вала).
Валик 7 конструктивно может быть выполнен в виде оси, установленной неподвижно относительно своих опор, укрепленных на роторе 1, при этом стержень 16, несущий захват 3, должен быть жестко связан непосредственно с ведомым зубчатым колесом 10, установленным на оси шарнирно (т.е. с возможностью вращения).
Фиксатор 11 выполнен в виде тормозной колодки со сквозным отверстием для посадки на вал 8, причем колодка имеет фасонный вырез, радиус кривизны которого равен радиусу тормозного диска 12, а в теле колодки по периметру сквозного отверстия имеются сквозные пазы для шлицевых зубьев вала 8. На фиксаторе 11 со стороны его фасонного выреза смонтирован приводной ролик для взаимодействия с пазом 17 диска 12 (фиг. 6).
Рабочая поверхность тормозного диска 12 имеет форму круглого цилиндра, паз 17 для роликов фиксаторов выполнен в теле диска по его рабочей поверхности, профиль паза выполнен криволинейным, при этом один участок паза соответствует интервалу поворота вала 8 и валика 7 (соответственно ведущего колеса 9 и ведомого колеса 10) и захвата 3 на угол, равной 360o, а другой участок - интервалу движения захвата в рабочем положении. Первый участок паза 17 совмещен с зубчатым сектором 14, при этом зубчатый сектор крепится к тормозному диску 12 со стороны, противоположной ротору 1.
Опора 15 вала 2 ротора 1 имеет Г-образную форму, горизонтальная часть опоры выполнена ступенчатой, при этом торец участка большего диаметра служит местом крепления диска 12, а на входе и выходе горизонтальной части опоры смонтированы подшипники для посадки вала 2 ротора.
Тормозной диск 12 имеет центральное отверстие, служащее для свободного прохода участка горизонтальной части опоры 15, имеющего меньший диаметр, и сквозные вырезы в виде дуг для крепления диска к опоре с возможностью поворота его относительно оси вала 2 ротора.
Пальцы захвата 3 и стержни 16 выполнены трубчатыми из материала с малой массовой плотностью, при этом их полости сообщаются между собой. Пустотелые пальцы каждого захвата 3 снабжены вакуум-присосами 18 (фиг. 6), выполненными из эластичного материала, полости пальцев через пустотелый стержень 16, связанный с укрепленным на валике 7 дисковым золотниковым вводом, посредством герметичной трубки связаны с источником вакуума.
Подшипниковые опоры валика 7 и вала 8 смонтированы на радиально расположенных спицах, жестко связанных с валом 2 ротора 1, при этом опоры имеют в основании продольные вырезы для болтов и крепятся к спицам с возможностью перемещения их в радиальном направлении. Этим обеспечивается возможность регулировки расстояния между геометрической осью вала 2 ротора и осями дополнительных валов 8, а также между осями валика 7 и вала 8 при наладке устройства.
Фиксаторы 11 и шестерня 13 закрыты защитным кожухом 19 цилиндрической формы, который крепится к опоре 15.
Питатель 4 состоит из накопителя 20, формирователя 21 и ворошителя 22 банок (фиг. 2). Накопитель 20 банок выполнен в виде прямоугольного стола с полированной плоской рабочей поверхностью, укрепленного с наклоном в сторону формирователя 21 банок, при этом стол закреплен с возможностью регулировки его высоты при помощи винтовых пар.
Формирователь 21 ряда банок выполнен в виде вилки, основание которой состыковано с накопителем 20 и закреплено на раме последнего. Каждый палец формирователя состоит из двух перпендикулярно расположенных одна относительно другой направляющих, горизонтальной и вертикальной, при этом рабочие поверхности горизонтальных направляющих всех пальцев формирователя расположены в одной плоскости, нормальной к поверхности ротора 1, а в теле горизонтальных направляющих имеются сквозные фигурные пазы для прохода вакуум-присосов 18, смонтированных на пальцах захватов 3. Формирователь 21 закреплен с возможностью установки его в разных плоскостях, расположенных по нормали относительно поверхности ротора 1, для чего вилка выполнена поворотной относительно оси крепления ее на раме накопителя 20, а стыковка пальцев формирователя с накопителем банок выполнена подвижной в направлении от накопителя к ротору, и наоборот (т.е. в направлении пальцев). Каждая пара соседних пальцев формирователя образует "ручей" для банок, на концах пальцев формирователя укреплены фигурные упоры для банок (по два упора на каждый "ручей"). Один из упоров в каждом "ручье" снабжен датчиком наличия банок, при этом все датчики соединены последовательно и сблокированы системой автоматического управления с приводом 6 ротора 1 для подвода захватов 3 к формирователю 21 только при наличии в "ручьях" формирователя полного комплекта банок. Над входной частью формирователя 21 перпендикулярно его пальцам установлена подпружиненная планка 23 (фиг. 2), служащая для предотвращения опрокидывания банок, находящихся на накопителе, но контактирующих с крайними банками в "ручьях" формирователя, при подъеме комплекта банок вакуум-присосами.
Ворошитель 22 банок состоит из двух параллельных реек прямоугольного сечения, расположенных вдоль боковых кромок накопителя 20. Возвратно-поворотное движение реек ворошителя, воздействующих на банки, облегчает вход последних в "ручье" формирователя.
Для исключения остановки ротора 1 в период после захвата банок вакуум-присосами и снятия их с формирователя до окончания формирования нового ряда банок предусмотрен конечный выключатель, вмонтированный в боковину паза 17 тормозного диска 12, нормально замкнутые контакты которого соединены параллельно с контактами датчиков наличия банок.
Для обеспечения остановки ротора 1 при работающем электродвигателе привода 6 последний снабжен электромагнитной муфтой 24.
Устройство работает следующим образом.
Предварительно включается в работу ворошитель 22 и транспортер подачи банок на накопитель 20, а в позицию загрузки подается пустой ящик. После образования полного комплекта банок на формирователе 21 включается в работу привод 6, обеспечивающий вращение ротора 1 с захватами 3. Пальцы захватов 3, проходя между пальцами формирователя 21, захватывают вакуум-присосами 18 банки, находящиеся в "ручьях" формирователя, и переносят их в позицию загрузки.
При вращении ротора 1 приводные ролики фиксаторов 11, перемещаясь в пазу 17 тормозного диска 12, перемещают фиксаторы, на которых они смонтированы, вдоль осей дополнительных валов 8. В позиции загрузки зубья шлицев дополнительного вала 8 выходят из зацепления со шлицами фиксатора 11, в результате чего последний перестает запирать захват 3 в рабочем положении. По окончании выхода шлицев из зацепления шестерня 13 входит в зацепление с зубчатым сектором 14, в вакуум-присосах 18 разрежение сменяется атмосферным давлением и банки устанавливаются на дно ящика или на расположенный ниже ряд банок, уже находящихся в ящике.
Вал 8 и валик 7 продолжают поворачиваться вместе с ротором 1, при этом, так как шестерня 13 взаимодействует с зубчатым сектором 14, жестко связанной системе стержень 16 - захват 3 посредством зубчатых колес 9 и 10 сообщается вращательное движение (поворот на 360o) относительно оси валика 7. В результате этого захват 3 выходит из ящика, проходит мимо опорного приспособления 5, не контактируя с последним, и до подхода к формирователю 21 завершает полный оборот.
Поскольку в рабочем (фиксированном относительно ротора) положении захвата 3 зацепление колес 9 и 10 обеспечивается при минимальном радиусе r1 ведущего колеса и максимальном радиусе r2 ведомого, мгновенная скорость захвата 3 в моменты начала и конца его вращения будет уменьшена (в сравнении с прототипом) в число раз, равное r1/r1, что снизит ударные нагрузки на границах интервала движения захвата. Внутри интервала движения скорость захвата 3 будет изменяться плавно в соответствии с изменением передаточного отношения колес 9 и 10.
После поворота захвата 3 на угол 360o шестерня 13 перестает взаимодействовать с зубчатым сектором 14, шлицы фиксатора 11 входят в зацепление с зубьями шлицев вала 8, в результате чего захват 3 запирается в рабочем положении.
При подходе захвата 3 к формирователю 21 ролик фиксатора 11 нажимает на конечный выключатель, вмонтированный в паз 17 тормозного диска 12, и размыкает его контакты, при этом, если формирователь 21 заполнен банками, ротор 1 продолжает вращение, если же ряд банок не сформирован, ротор 1 посредством электромагнитной муфты 24 останавливается при работающем электродвигателе привода 6, по окончании формирования комплекта банок на формирователе контакты датчиков наличия банок замыкаются и ротор 1 автоматически включается в работу.
После загрузки ряда банок в ящик опора 5 опускает ящик на расстояние, равное банки, а после наполнения ящика выводит его из устройства, сигнализируя о подаче под загрузку пустого ящика.
Введение некруглых зубчатых колес (овальных, эллиптических и др.) в связь захватов с дополнительными валами позволит уменьшить ударные нагрузки и таким образом повысить надежность функционирования устройства. В результате повысится производительность устройства при достигнутой интенсификации процесса укладки, поскольку с повышением надежности уменьшаются внецикловые потери производительности.
Источники информации, принятые во внимание при составлении заявки
1. Авт. св. СССР N 878654, кл. B 65 B 5/10, 1978.
2. Авт. св. СССР N 939316, кл. B 65 B 5/10, 1982.0
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1994 |
|
RU2091277C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2137686C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2138425C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2142392C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1993 |
|
RU2091276C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ | 1998 |
|
RU2151087C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2008 |
|
RU2375271C1 |



Изобретение относится к упаковочному оборудованию и может быть использовано в линиях производства консервов и пресервов для групповой укладки банок в ящики и на поддоны. Устройство содержит ротор, укрепленный на горизонтальном валу, с радиальными захватами, питатель предметов, опору для тары и привод. Каждый захват смонтирован на конце расположенного параллельно валу ротора выходного валика, выполненного в виде консоли, выходящей за пределы торца дополнительного вала. На консольном конце дополнительного вала жестко закреплено ведущее зубчатое колесо некруглой формы, взаимодействующее с ведомым колесом некруглой формы, жестко закрепленным на выходном валике. На другом конце дополнительного вала смонтированы фиксатор для взаимодействия с тормозным диском, а также шестерня для взаимодействия с зубчатым сектором. Тормозной диск закреплен на опоре вала. Зубчатый сектор смонтирован на тормозном диске. Изобретение позволяет повысить производительность и уменьшить ударные нагрузки. 6 ил.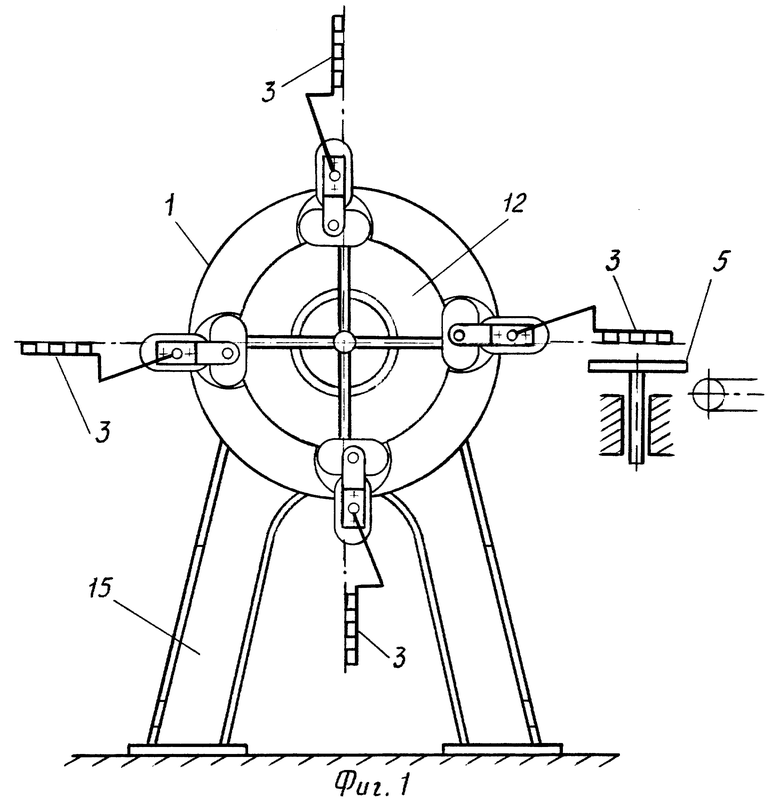
Устройство для укладки штучных предметов, содержащее питатель предметов, укрепленный на горизонтальном валу ротор, дополнительные валы, установленные с возможностью сложного прерывистого движения, концы которых выполнены в виде консолей, и захваты для предметов, отличающееся тем, что каждый захват кинематически связан с соответствующим дополнительным валом, при этом кинематическая связь включает выходной валик и зубчатую передачу, в частности пару некруглых зубчатых колес, из которых ведущее колесо укреплено преимущественно на консольном конце дополнительного вала, а ведомое - на выходном валике, при этом захват для предметов жестко укреплен на свободном конце выходного валика.
| Устройство для укладки штучных предметов | 1978 |
|
SU878654A2 |
| Устройство для укладки штучных предметов | 1978 |
|
SU939316A2 |
