Изобретение относится к упаковочному оборудованию и может быть использовано преимущественно в рыбоконсервном и пресервном производствах для укладки банок в ящики и на поддоны.
Известно устройство для укладки штучных предметов в тару (авт. св. СССР 878654, опубл. в Б.И., 1981. - 41), содержащее питатель предметов, укрепленный на горизонтальном валу ротор с радиальными поворотными захватами, укрепленными на дополнительных валах, механизмы для сообщения захватам возвратно-поступательного движения перпендикулярно оси, параллельной валу ротора, опорное приспособление для тары и привод.
Основным недостатком данного устройства является то, что усложнена реализация движения захвата после укладки предметов в тару. При выходе из ящика захват совершает сложное движение: вращательное (поворот на 360o) относительно оси соответствующего дополнительного вала и возвратно-поступательное перпендикулярно оси, параллельной валу ротора. При выходе из ящика и последующем возвращении в рабочее положение захват движется по сложной траектории, осуществление которой значительно ограничивает его скорость. Это приводит к увеличению периода рабочего цикла и снижению производительности устройства.
Известно также устройство для групповой укладки изделий, содержащее установленный на горизонтальном валу ротор, дополнительные валы, закрепленные на роторе параллельно его валу и снабженные приводом периодического вращения, кулачково-рычажные механизмы, ведущие кулачки которых жестко закреплены на соответствующих дополнительных валах, а выходные звенья выполнены с возможностью сложного движения в плоскости, перпендикулярной продольной оси вала ротора, захваты, кинематически связанные с валом ротора посредством дополнительных валов и кулачково-рычажных механизмов и жестко закрепленные на выходных звеньях механизмов (патент РФ 2142391, опубл. в Б.И., 1999. - 34 - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является то, что в начале выхода захвата из ящика он контактирует со стенкой ящика, обращенной к ротору. В результате взаимодействия захвата с ящиком имеют место внецикловые потери рабочего времени (простои устройства, связанные с устранением брака). Упомянутое контактирование имеет место, поскольку захват после укладки изделий в ящик начинает двигаться по кривой, направленной вверх и в сторону ротора. Контактирование особенно ощутимо после укладки первых слоев изделий, когда захват заходит глубоко в ящик. Незначительное контактирование захвата с ящиком при укладке верхних слоев изделий (например, четвертого, пятого и шестого) также приводит к деформированию ящика и снижению качества укладки.
Задачей настоящего изобретения является повышение качества укладки и производительности.
Решение поставленной задачи достигается тем, что в устройстве для групповой укладки предметов, содержащем установленный на горизонтальном валу ротор, дополнительные валы, закрепленные на роторе параллельно его валу и снабженные приводом периодического вращения, кулачково-рычажные механизмы, ведущие кулачки которых жестко закреплены на соответствующих дополнительных валах, а выходные звенья выполнены с возможностью движения в плоскости, перпендикулярной продольной оси вала ротора, и захваты, кинематически связанные с валом ротора посредством дополнительных валов и кулачково-рычажных механизмов и жестко закрепленные на упомянутых выходных звеньях, рабочий профиль каждого ведущего кулачка на участках прямого и обратного хода толкателя выполнен в виде спирали Архимеда, а на участке, разделяющем два вышеуказанных, имеет постоянный радиус-вектор, выходное звено каждого кулачково-рычажного механизма выполнено в виде коромысла, смонтированного на оси, параллельной валу ротора, и связанного с толкателем кулачка посредством шатуна, при этом упомянутая ось жестко закреплена на роторе.
Каждое коромысло выполнено двуплечим, при этом одно плечо коромысла шарнирно связано с шатуном, а захват закреплен на другом плече.
Закон движения выходного звена удовлетворяет зависимости:
где β - текущий угол поворота выходного звена, отсчитываемый от линии центров вращения кулачка и качания коромысла;
d - расстояние между центром качания выходного звена и шарниром, связывающим шатун с толкателем, при положении последнего на границе прямого и обратного хода;
l - длина шатуна;
b - длина плеча выходного звена;
х - приращение пути толкателя: при прямом ходе d + х; при обратном ходе d+ s - х;
s - максимальный ход толкателя, s = ∑ x.
Кулачки снабжены центрально расположенными толкателями, подвижно сопряженными с направляющими, жестко закрепленными на роторе.
В каждом кулачково-рычажном механизме плоскости осей вращения кулачка и качания коромысла совпадают с плоскостью толкателя.
Заявляемое устройство отличается от прототипа иной формой связи захватов с валом ротора, а также иной формой выполнения выходных звеньев, несущих захваты.
В отличие от прототипа, в котором выходные звенья, несущие захваты, совершают сложные движения (при движении их относительно ротора), так как они шарнирно связаны непосредственно с толкателями соответствующих кулачков, в предлагаемом устройстве каждое выходное звено, несущее захват, выполнено в виде коромысла, связанного с толкателем соответствующего кулачка посредством шатуна и совершающего простое возвратно-поворотное движение относительно оси, закрепленной на роторе. Наличие шатуна между толкателем и коромыслом, несущим захват, является отличием заявляемого устройства от прототипа по форме связи захватов с валом ротора. При такой кинематической связи обеспечивается движение захвата относительно ротора по дуге постоянного радиуса, при котором исключается его взаимодействие с ящиком. Кроме того, выполнение профиля ведущего кулачка на участке движения толкателя в виде спирали Архимеда обеспечивает быстрое нарастание скорости захвата при выходе его из ящика и последующее его равномерное движение. Такой характер перемещения захвата также способствует его бесконтактному выходу из ящика. Наличие между упомянутыми участками профиля кулачка участка с постоянным радиус-вектором обеспечивает выстаивание захвата после прямого хода (после поворота на заданный угол) до начала обратного хода. Этим достигается бесконтактное прохождение захвата мимо опорного приспособления для тары.
Выполнение коромысла, несущего захват, двуплечим удовлетворяет требованию технологичности компоновки захвата в составе ротора. При переносе предметов от питателя к ящику пальцы захвата занимают радиальное положение относительно ротора, при этом плоскость размещения пальцев совпадает с плоскостью соответствующего толкателя и плоскостью центров поворотного движения кулачка и коромысла. Это способствует бесконтактному входу захвата с предметами в наполняемый ящик.
Формула (1) представляет собой функцию положения выходного звена предложенного кулачково-рычажного механизма. Наличие аналитической зависимости дает возможность для расчета перемещения захвата с высокой степенью точности. Это, в конечном счете, важно для повышения качества укладки предметов в тару.
Центральное расположение толкателей ведущих кулачков дает возможность для реализации равновеликих законов движения при прямом и обратном ходах выходных звеньев с захватами. Кроме того, кулачки с центральным расположением толкателей при прочих равных условиях имеют более благоприятную функцию углов давления (более благоприятную функцию силовой работоспособности).
Расположение толкателя и осей вращения кулачка и качания коромысла в одной плоскости значительно упрощает компоновку каждого из механизмов в системе вращающегося ротора, упрощает переналадку и обслуживание устройства. При такой геометрии каждый механизм имеет минимальные габариты, легко выписывается и встраивается в площадь окружности ротора.
Обоснование преимуществ заявляемого устройства показывает, что улучшение качества укладки предметов и повышение производительности достигается в результате выполнения выходного звена каждого кулачково-рычажного механизма в виде коромысла, совершающего возвратно-поворотные движения с выстоем между интервалами движения прямого и обратного ходов. Решению поставленной задачи способствует также выполнение рабочих профилей ведущих кулачков в виде спирали Архимеда и оптимальная компоновка звеньев и кинематических пар кулачково-рычажных механизмов в системе ротора устройства.
Предлагаемое устройство для групповой укладки предметов поясняется чертежами.
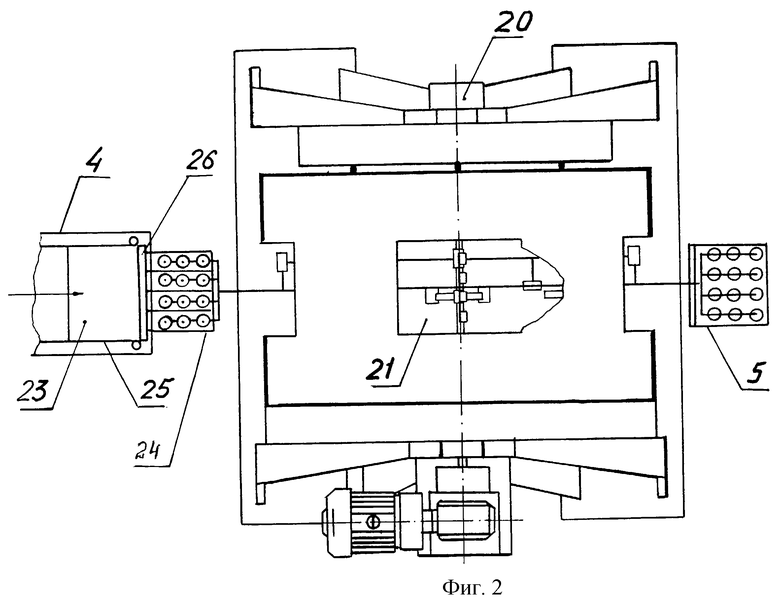
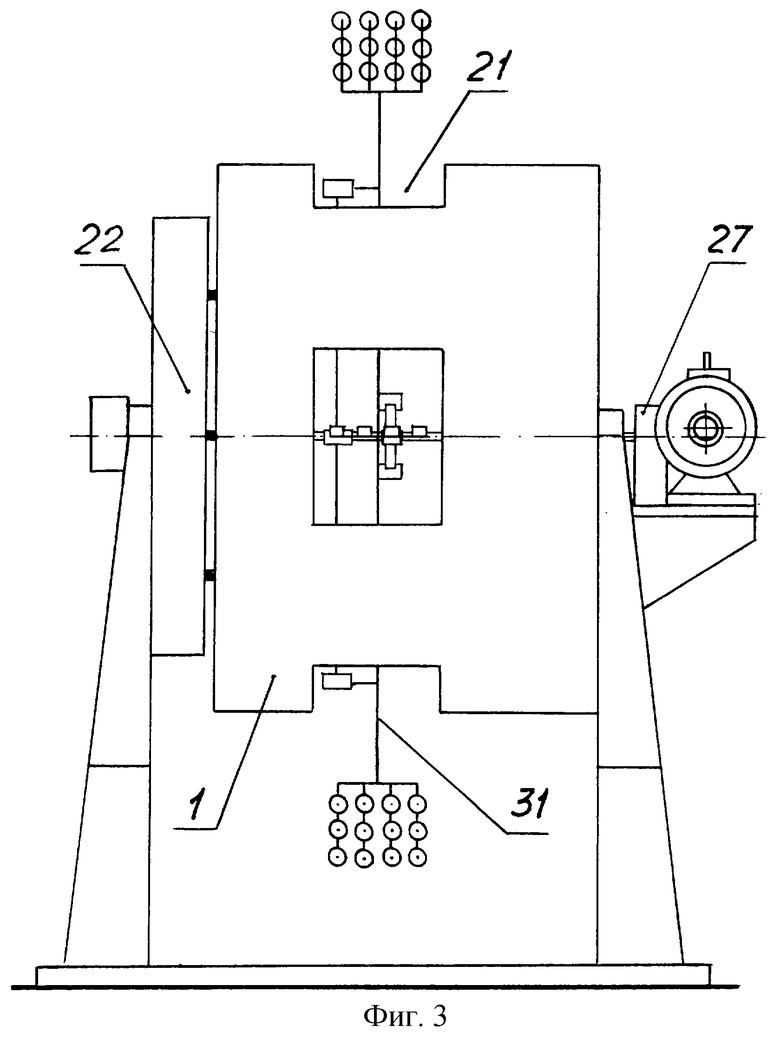
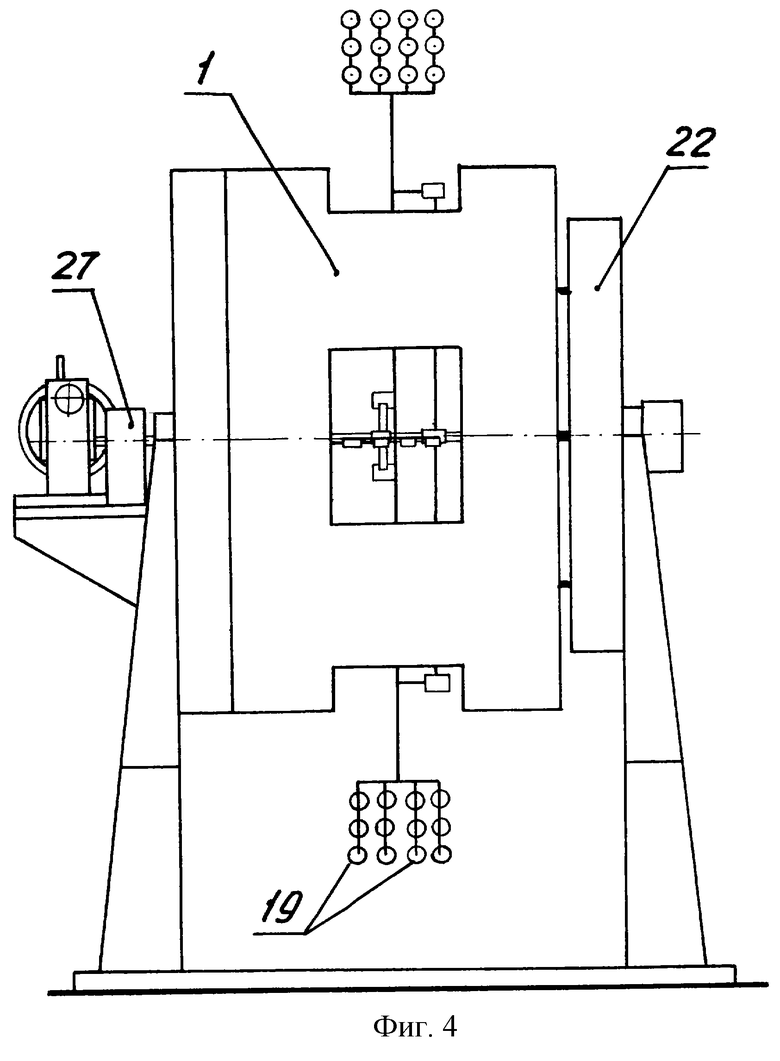
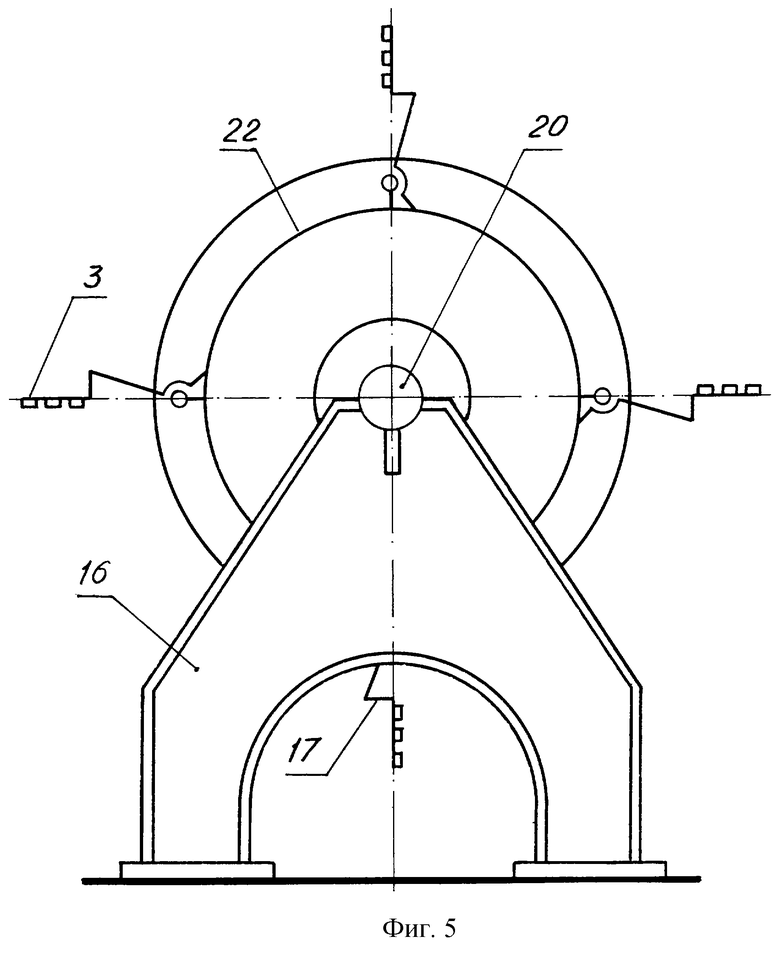
На фиг. 1 изображено устройство, вид спереди; на фиг.2 - то же, вид сверху; на фиг.3 - то же, вид слева; на фиг.4 - то же, вид справа; на фиг.5 - то же, вид сзади; на фиг.6 - кулачково-рычажный механизм захвата; на фиг.7 - схема механизма к определению законов движения.
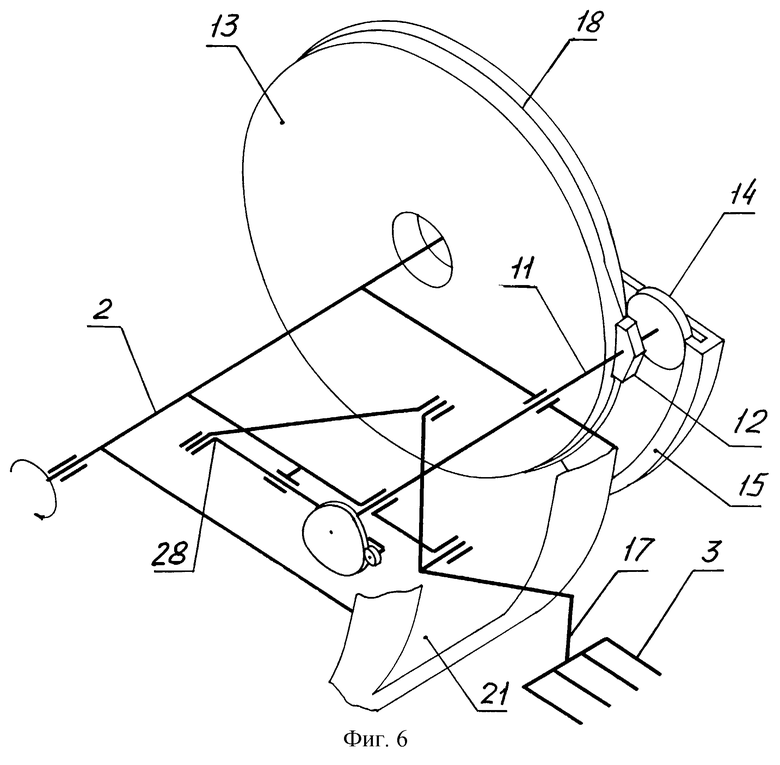
Устройство содержит ротор 1, укрепленный на горизонтальном валу 2, с радиальными захватами 3, питатель 4 предметов, опору 5 для тары и привод 6. Каждый захват 3 жестко закреплен на конце двуплечего коромысла 7, которое в средней части шарнирно соединено с ротором. Другое плечо коромысла шарнирно соединено с шатуном 8, свободный конец которого шарнирно связан с толкателем 9 ведущего кулачка 10. Кулачок закреплен на соответствующем дополнительном валу 11, который расположен параллельно валу 2 ротора 1 и смонтирован в подшипниковых опорах, расположенных внутри ротора. На конце вала 11 размещены фиксатор 12 для взаимодействия с тормозным диском 13 и шестерня 14 для взаимодействия с зубчатым сектором 15. При этом, тормозной диск закреплен на опоре 16 (фиг.1 и 5) вала ротора 1, а зубчатый сектор 15 смонтирован на диске.
Захват 3 выполнен вилкообразным и закреплен на стержне 17 (фиг.5 и 6), который жестко соединен с концом плеча коромысла 7, выходящим за пределы ротора 1. Пальцы захвата 3 расположены относительно стержня 17 под прямым углом. Расположение коромысла 7 и стержня 17 в пространстве таково, что пальцы в рабочем положении захвата направлены нормально поверхности ротора 1. Рабочий профиль кулачка 10 на участках удаления (прямой ход) и приближения (обратный ход) толкателя 9 выполнен в виде спирали Архимеда, причем между упомянутыми участками расположен участок с постоянным максимальным радиус-вектором. Рабочее положение захвата 3 соответствует положению толкателя 9 при минимальном радиус-векторе кулачка. Фиксатор 12 выполнен в виде тормозной колодки со сквозным отверстием для посадки на вал 11, причем колодка имеет фасонный вырез, радиус кривизны которого равен радиусу тормозного диска 13, а в теле колодки по периметру сквозного отверстия имеются сквозные пазы для шлицевых зубьев вала 11. На фиксаторе 12 со стороны его фасонного выреза смонтирован приводной ролик для взаимодействия с пазом 18 тормозного диска 13. Рабочая поверхность тормозного диска 13 имеет форму круглого цилиндра, паз 18 (фиг.4 и 6) для роликов фиксаторов выполнен в теле диска по его рабочей поверхности, а профиль паза выполнен криволинейным. При этом один участок паза соответствует интервалу поворота дополнительных валов 11 с кулачками 10 на угол, равный 360o, а другой участок - интервалу движения захвата в рабочем положении. Первый участок паза 18 совмещен с зубчатым сектором 15, при этом зубчатый сектор прикреплен к тормозному диску 13 со стороны, противоположной ротору 1. Тормозной диск 13 имеет центральное отверстие, служащее для свободного прохода вала 2 ротора 1, и сквозные вырезы в виде дуг для крепления диска к опоре 16 с возможностью поворота его при монтаже и наладке.
Пальцы захватов 3 и стержни 17 выполнены трубчатыми из материала с малой массовой плотностью, при этом полости пальцев и стержня 17 каждого захвата сообщаются между собой. Пальцы захватов 3 снабжены вакуум-присосами 19, выполненными из эластичного материала. Полости пальцев связаны с источником вакуума через пустотелый стержень 17 посредством герметичной трубки, закрепленной скобами на коромысле 7 и валу 2 ротора 1, и коллектора 20. Подшипниковые опоры дополнительных валов 11 смонтированы на радиально расположенных спицах, жестко связанных с валом 2 ротора 1, при этом опоры имеют в основаниях продольные вырезы для болтов и укреплены на спицах с возможностью перемещения их в радиальном направлении. Этим обеспечивается регулировка расстояния между продольной осью вала 2 ротора 1 и продольной осью каждого из дополнительных валов 11 при наладке устройства. В цилиндрической стенке ротора 1 имеются сквозные вырезы 21, через которые проходят захваты 3 при выполнении ими прямых и обратных ходов. Фиксаторы 12 и шестерни 14 закрыты защитным кожухом 22 цилиндрической формы, который днищем крепится к опоре 16 вала 2 ротора 1.
Питатель 4 состоит из накопителя 23 (фиг.2), формирователя 24 и ворошителя 25 предметов. Накопитель изделий выполнен в виде прямоугольного стола с полированной плоской рабочей поверхностью, укрепленного с наклоном в сторону формирователя 24 предметов. При этом стол закреплен с возможностью регулирования его высоты при помощи винтовых муфт. Формирователь 24 ряда предметов выполнен в виде вилки, основание которой состыковано с накопителем 23 и закреплено на его раме. Каждый палец формирователя состоит из двух перпендикулярно расположенных одна относительно другой направляющих, горизонтальной и вертикальной. При этом рабочие поверхности горизонтальных направляющих всех пальцев формирователя расположены в одной плоскости, нормальной поверхности ротора, причем в теле горизонтальных направляющих выполнены сквозные фигурные вырезы для прохода вакуум-присосов 19, смонтированных на пальцах захватов 3. Формирователь 24 укреплен с возможностью установки его на различной высоте по нормали относительно поверхности ротора 1. Для этого вилка выполнена поворотной относительно оси крепления ее на раме накопителя 23, а стыковка пальцев формирователя с накопителем предметов выполнена подвижной в направлении от накопителя к ротору, и наоборот. Каждая пара соседних пальцев формирователя 24 образует "ручей" для предметов. На концах пальцев формирователя укреплены фигурные упоры для предметов (по два упора на каждый "ручей"). Один из упоров в каждом "ручье" снабжен датчиком наличия предметов. При этом, все датчики соединены последовательно и сблокированы системой автоматического управления с приводом 6 устройства для подвода захватов 3 к формирователю 24 только при наличии в "ручьях" последнего полного комплекта предметов.
Для исключения остановки ротора в период после захвата предметов вакуум-присосами и снятия их с формирователя до окончания формирования нового ряда предметов предусмотрен конечный выключатель. Последний вмонтирован в боковину паза 18, нормально замкнутые контакты выключателя соединены параллельно с контактами датчиков наличия предметов. Над входной частью формирователя 24 перпендикулярно его пальцам установлена подпружиненная планка 26. Она служит для предотвращения опрокидывания предметов, находящихся на накопителе, но контактирующих с крайними предметами в "ручьях" формирователя, при подъеме комплекта предметов вакуум-присосами. Ворошитель 25 предметов состоит из двух параллельных реек, расположенных вдоль боковых кромок накопителя 23. Возвратно-поворотное движение реек ворошителя, воздействующих на предметы, способствует входу предметов в "ручьи" формирователя. Для обеспечения остановки ротора 1 при работающем электродвигателе привода 6 последний снабжен электромагнитной муфтой 27.
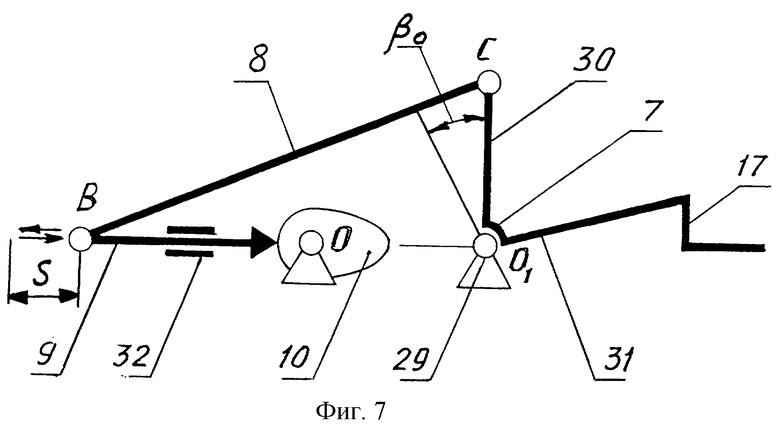
Звенья 10, 9, 8 и 7 в кинематической связи образуют кулачково-рычажный механизм 28. С коромыслом 7 каждого механизма 28 жестко соединен соответствующий захват 3, причем коромысло смонтировано на оси 29, укрепленной на соответствующей спице ротора 1. Шарнирная связь коромысла 7 с ротором может иметь двоякое конструктивное исполнение: например, ось 29 жестко закреплена на коромысле и образует шарнир со спицей ротора, либо ось 29 жестко закреплена на спице и образует шарнир с коромыслом механизма. Длина плеча 30 коромысла, конец которого шарнирно связан с шатуном 8, выбрана из условия обеспечения угла его размаха, т.е. из условия обеспечения требуемого угла поворота захвата 3 относительно ротора. Это связано с тем, что длина плеча 30 при прочих равных значениях параметров схемы механизма 28 существенно влияет на величину угла размаха захвата 3. Размеры плеча 31, несущего захват, выбраны из условия обеспечения оптимального расстояния от оси вала 2 ротора 1 до центра захвата. При оптимальном значении упомянутого расстояния обеспечивается такая траектория движения захвата при переносе предметов, при которой в момент входа захвата в ящик исключается контакт между ними. Функция положения коромысла 7, т.е. закон движения выходного звена кулачково-рычажного механизма 28, представленного на фиг.7, описывается выражением
где β - угол поворота коромысла 7 в функции перемещения толкателя 9;
d= О1В - расстояние между центром O1, качания коромысла 7 и шарниром В, связывающим толкатель 9 с шатуном 8, при минимальном радиус-векторе кулачка 10;
l=ВС - длина шатуна 8; b=СОl - длина плеча 30 коромысла 7;
±х - приращение пути толкателя 9: +х - при прямом ходе, -х - при обратном ходе;
β0 - полный угол размаха коромысла 7.
Поскольку профиль кулачка 10 на участках удаления и приближения толкателя 9 выполнен симметричным в виде спирали Архимеда, полный (максимальный) ход толкателя составляет
S=Rmax-Rmin,
где S - полный ход толкателя в интервале его удаления или приближения;
Rmax - максимальный радиус-вектор кулачка;
Rmin - минимальный радиус-вектор кулачка.
При таком конструктивном выполнении профиля ведущего кулачка 10 его толкатель будет совершать возвратно-поступательное движение с постоянной скоростью. При этом, на границах интервалов прямого и обратного ходов толкатель будет выстаивать. Толкатель 10 каждого кулачково-рычажного механизма 28 подвижно сопряжен с направляющей 32, жестко закрепленной на соответствующей спице ротора 1. Оси вращения кулачка 10 и качания коромысла 7 и толкатель 9 каждого механизма 28 лежат в одной плоскости, параллельной продольной оси вала ротора 1.
Устройство работает следующим образом.
Включаются в работу транспортер подачи предметов на накопитель 23 и ворошитель 25, в позицию укладки подается пустой ящик. После образования полного комплекта предметов на формирователе 24 включается в работу привод 6, обеспечивающий вращение ротора 1 с захватами 3 с постоянной скоростью. Пальцы захватов 3, проходя между пальцами формирователя 24, захватывают вакуум-присосами 19 предметы, находящиеся в "ручьях" формирователя, и переносят их в позицию укладки. При вращении ротора 1 приводные ролики фиксаторов 12, перемещаясь в пазу 18 тормозного диска 13, перемещают фиксаторы, на которых они смонтированы, вдоль оси дополнительных валов 11. В позиции укладки зубья шлицев дополнительного вала 11 выходят из зацепления со шлицами фиксатора 12, в результате чего последний перестает запирать захват 3 в рабочем положении.
По окончании выхода шлицев из зацепления шестерня 14 входит в зацепление с зубчатым сектором 15. В вакуум-присосах 19 разрежение сменяется атмосферным давлением и предметы устанавливаются на дно ящика или на расположенный ниже ряд предметов, уже находящихся в ящике. Вал 11 продолжает поворачиваться вместе с ротором 1. При этом, поскольку шестерня 14 взаимодействует с зубчатым сектором 15, обеспечивается поворотом на 360o укрепленного на валу 11 ведущего кулачка 10. Последний посредством толкателя 9 и шатуна 8 сообщает жестко связанной системе "плечи 30 и 31 коромысла - стержень 17 - захват 3" возвратно-поворотное движение относительно центра качания коромысла с выстоем между интервалами прямого и обратного ходов. В результате этого захват 3 выходит из ящика, проходит мимо опоры 5, не имея контакта с последней, и до подхода к формирователю 24 возвращается в рабочее положение. После поворота кулачка 10 на 360o, чему соответствует приход захвата 3 в рабочее положение, шестерня 14 перестает взаимодействовать с зубчатым сектором 15, а шлицы фиксатора 12 входят в зацепление с зубьями шлицев вала 11 и захват 3 запирается в рабочее положение.
При подходе захвата 3 к формирователю 24 ролик фиксатора 12 нажимает на конечный выключатель, вмонтированный в паз 18 тормозного диска 13, и размыкает его контакт. Если формирователь 24 заполнен предметами, ротор 1 продолжает вращение. Если же ряд предметов не сформирован, ротор 1 посредством электромагнитной муфты 27 останавливается при работающем электродвигателе привода 6. По окончании формирования комплекта предметов на формирователе контакты датчиков наличия предметов замыкаются и ротор 1 автоматически включается в работу. Аналогичным образом функционируют с интервалом во времени и другие захваты устройства, обеспечивая групповую укладку предметов в тару. После укладки ряда предметов в ящик опора 5 опускает ящик на расстояние, равное высоте уложенных предметов. После наполнения ящика последний выводится из устройства, сигнализируя о подаче на опору 5 для тары пустого ящика.
В рабочем положении захвата 3, т.е. в интервале переноса предметов от питателя 4 к ящику, ведущий кулачок 10 занимает положение, при котором соответствующий толкатель 9 контактирует с минимальным радиус-вектором его профиля. Это положение толкателя соответствует началу прямого хода коромысла 7 с захватом 3. После поворота кулачка 10 на угол удаления, т.е. после завершения прямого хода толкателя 9, последний начинает взаимодействовать с участком профиля кулачка, имеющим постоянный максимальный радиус-вектор. В интервале постоянного радиус-вектора захват 3, находясь в "откинутом" положении, оказывается зафиксированным относительно ротора. Это способствует бесконтактному проходу захвата относительно опоры 5 для ящика. После поворота кулачка 10 на угол постоянного радиус-вектора и соответствующего выстаивания захвата относительно ротора, толкатель 9 совершает обратный ход. При этом, захват 3 до подхода к формирователю 24 возвращается в рабочее положение.
Выполнение выходного звена кулачково-рычажного механизма в виде коромысла, несущего захват и совершающего возвратно-поворотные движения с выстоями на границах интервалов прямого и обратного ходов, дает возможность повысить качество укладки предметов и производительность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| МАШИНА ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2005 |
|
RU2278804C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ШТУЧНЫХ ИЗДЕЛИЙ | 1993 |
|
RU2085451C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2001 |
|
RU2198831C2 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ | 2003 |
|
RU2248313C1 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 2001 |
|
RU2206479C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1996 |
|
RU2146212C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |
Изобретение относится к упаковочному оборудованию. Устройство для групповой укладки предметов содержит установленный на валу ротор, дополнительные валы, закрепленные на роторе параллельно его валу и снабженные приводом периодического вращения, кулачково-рычажные механизмы, ведущие кулачки которых жестко закреплены на соответствующих дополнительных валах, а выходные звенья выполнены с возможностью движения в плоскости, перпендикулярной продольной оси вала ротора, посредством дополнительных валов и кулачково-рычажных механизмов и жестко закреплены на упомянутых выходных звеньях. Рабочий профиль каждого ведущего кулачка на участках прямого и обратного хода толкателя выполнен в виде спирали Архимеда, а на участке, разделяющем два вышеуказанных, имеет постоянный радиус-вектор. Выходное звено каждого кулачково-рычажного механизма выполнено в виде коромысла, смонтированного на оси, параллельной валу ротора, и связанного с толкателем кулачка посредством шатуна, при этом упомянутая ось жестко закреплена на роторе. В результате повышается качество укладки и производительность устройства. 4 з.п. ф-лы, 7 ил.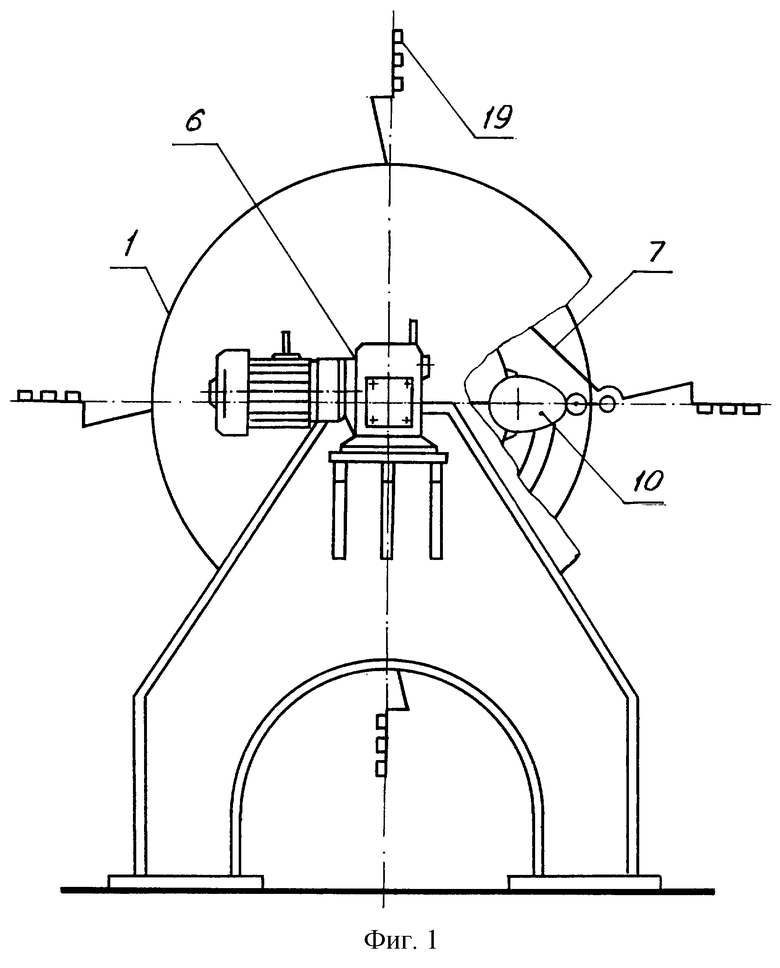

где β - текущий угол поворота выходного звена, отсчитываемый от линии центров вращения кулачка и качания коромысла;
d - расстояние между центром качания выходного звена и шарниром, связывающим шатун с толкателем, при положении последнего на границе прямого и обратного хода;
1 - длина шатуна;
b - длина плеча выходного звена;
х - приращение пути толкателя: при прямом ходе d + х; при обратном ходе d + s - х;
s - максимальный ход толкателя, s = ∑x.
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ В ТАРУ ШТУЧНЫХ ИЗДЕЛИЙ | 1996 |
|
RU2125954C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |

