Изобретение относится к системам измерения и индикации, обеспечивающим пилотирование летательных аппаратов в случае отказа основных пилотажно-навигационных систем.
Известен блок ориентации [1], содержащий блок датчиков первичной информации, трехкомпонентный магнитометр, аналого-цифровой преобразователь, вычислительную машину, основанный на алгоритмическом способе списания девиации магнитометра.
Недостатком данного устройства, как и реализуемого им способа, является его низкая точность из-за отсутствия в нем устройства для компенсации внешнего магнитного поля магнитометра.
Известен также интегрированный резервный прибор [2], содержащий блок инерциальных датчиков информации, жидкокристаллический экран, датчик магнитного поля, соединенные с вычислителем, основанный на алгоритмическом способе списания девиационной погрешности датчика магнитометра.
Недостатком данного устройства, как и реализуемого им способа, также является его низкая точность из-за отсутствия в нем устройства для компенсации внешнего магнитного поля датчика магнитного поля.
Заявленное изобретение направлено на повышение точности измерения прибора за счет списания девиационной погрешности при высоком внешнем возмущающем магнитном поле.
Поставленная задача достигается тем, что в интегрированной системе резервных приборов, содержащей блок инерциальных датчиков информации, жидкокристаллический экран, датчик магнитного поля, соединенные с вычислителем, согласно изобретению в датчик магнитного поля дополнительно введены компенсационные обмотки по каждой измерительной оси, а в интегрированную систему резервных приборов дополнительно введены три канала преобразования, каждый из которых содержит буфер и регулятор напряжения, вход которого подключен к вычислителю, а выход через буфер подключен к компенсационной обмотке каждой измерительной оси датчика магнитного поля.
В способе калибровки датчика магнитного поля интегрированной системы резервных приборов, заключающемся в определении коэффициентов калибровки с последующим анализом их величины, согласно изобретению в случае превышения коэффициентами калибровки предельно допустимой величины в компенсационную обмотку соответствующей измерительной оси датчика магнитного поля подают определенную величину постоянного тока для компенсации внешнего возмущающего магнитного поля, затем повторяют калибровку с целью определения новых коэффициентов калибровки, не выходящих за рамки предельно допустимой величины, и, тем самым, более точно компенсируют внешнее возмущающее магнитное поле.
Существенными отличиями предложенного устройства является введение компенсационных обмоток по каждой измерительной оси в датчик магнитного поля и трех каналов преобразования с соответствующими элементами, позволяющими компенсировать внешнее возмущающее магнитное поле и тем самым повысить точность измерения магнитного курса.
К существенным признакам предложенного способа калибровки датчика магнитного поля относится введение операции определения коэффициентов калибровки датчика магнитного поля и, в зависимости от значения этих коэффициентов, подача определенного значения постоянного тока в его компенсационную обмотку, чем также обеспечивается повышение точности измерения магнитного курса.
На чертеже представлена схема устройства, которое содержит блок 1 инерциальных датчиков информации, жидкокристаллический экран 2, датчик 3 магнитного поля, вычислитель 4, компенсационные обмотки 5, каналы 6, 7, 8 преобразования, буфер 9, регулятор 10 напряжения.
В предложенной системе блок 1 инерциальных датчиков информации, жидкокристаллический экран 2, датчик 3 магнитного поля соединены с вычислителем 4, компенсационные обмотки 5 размещены на датчике 3 магнитного поля, а в каждом канале 6-8 вход буфера 9 подключен через регулятор 10 напряжения к вычислителю 4, выход буфера 9 подключен к компенсационной обмотке 5.
Система работает следующим образом.
При размещении системы на летательном аппарате (ЛА) вокруг нее располагаются различные устройства, содержащие железистые сплавы и объекты, обладающие остаточным магнетизмом. Датчик 3 магнитного поля реагирует на векторную сумму магнитного поля Земли и всех накладывающихся на него магнитных полей. В зависимости от силы последних значительно снижается точность определения направления на магнитный полюс Земли. Эта разница называется девиацией. Если действие внешнего возмущающего поля постоянно, то датчик 3 магнитного поля можно откалибровать. Для этого ЛА, на котором установлен датчик магнитного поля, необходимо повернуть на 360° вокруг своей вертикальной оси, в процессе вращения записываются данные о продольной и поперечной составляющих магнитного поля Земли, после чего вычисляются коэффициенты калибровки, которые учитывают влияние внешнего возмущающего магнитного поля. В случае если возмущающее магнитное поле превышает измеряемую составляющую, то коэффициенты калибровки превышают предельно допустимую величину и калибровка становится невозможной. Для осуществления калибровки в условиях сильных возмущающих магнитных полей в датчик 3 магнитного поля введены компенсационные обмотки 5 по каждой измерительной оси, которые создают компенсирующее магнитное поле с величиной, равной внешнему возмущающему магнитному полю, после чего калибровку повторяют и определяют новые коэффициенты калибровки, используемые для точного определения составляющих магнитного поля Земли.
Блок 1 инерциальных датчиков информации и датчик 3 магнитного поля выдают текущие значения ускорения, угловой скорости, величины магнитного поля Земли в виде электрических сигналов в вычислитель 4, где производится вычисление необходимых значений пилотажно-навигационных параметров и формирование информации для пилота, отражаемой на жидкокристаллическом экране 2. После проведения первой калибровки и определения коэффициентов калибровки вычислитель 4, исходя из величины этих коэффициентов, формирует управляющие сигналы, которые поступают на регуляторы 10 напряжения соответствующего канала 6-8, затем через буферы 9 тех же каналов ток, пропорциональный напряжению, поступает на компенсационные обмотки 5 датчика 3 магнитного поля и происходит компенсация внешнего возмущающего магнитного поля. При повторной калибровке определяются коэффициенты калибровки после компенсации, которые используются для точного определения направления магнитного поля Земли. Резервная система выполняется в виде отдельного блока, на передней панели которого размещен жидкокристаллический экран 2, на задней панели размещен блок 1 инерциальных датчиков информации и датчик 3 магнитного поля, в средней части размещены вычислитель 4, каналы 6-8 преобразования, источники питания.
Источники информации
1. Юбилейная XV Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. Санкт-Петербург, 2008 г., стр.263. Компенсация магнитной девиации интегрированной системы резервных приборов. В.М.Самойлов, Д.В.Свяжин.
2. Заявка на патент Канады №2683254, кл. G01C 23/00, опубликована 17.04.2010 г. (ближайший аналог).
3. Патент РФ №2282205, МПК G01R 33/02, опубликованный 20.08.2006 г. (ближайший аналог).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки датчика магнитного поля интегрированной системы резервных приборов | 2016 |
|
RU2660043C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ И СПОСОБ КАЛИБРОВКИ ДАТЧИКА МАГНИТНОГО ПОЛЯ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ | 2015 |
|
RU2593424C1 |
| Интегрированная система резервных приборов | 2016 |
|
RU2656954C1 |
| Интегрированная система резервных приборов | 2018 |
|
RU2734278C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2009 |
|
RU2386927C1 |
| Интегрированная система резервных приборов и способ индикации информации | 2018 |
|
RU2748304C2 |
| Интегрированная система резервных приборов летательного аппарата | 2017 |
|
RU2682134C1 |
| Интегрированная система резервных приборов | 2023 |
|
RU2831723C1 |
| Интегрированная система резервных приборов | 2017 |
|
RU2690029C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
Изобретение относится к системам измерения и индикации, обеспечивающим пилотирование летательных аппаратов в случае отказа основных пилотажно-навигационных систем. Техническим результатом заявленной группы изобретений является повышение точности измерения прибора за счет списания девиационной погрешности при высоком внешнем возмущающем магнитном поле. Интегрированная система резервных приборов (ИСРП) содержит блок инерциальных датчиков, жидкокристаллический экран и датчик магнитного поля (ДМП), соединенные с вычислителем. В ДМП по каждой оси введены компенсационные обмотки, а в ИСРП три канала преобразования. Для калибровки ДМП определяются калибровочные коэффициенты, анализируются их величины и, в зависимости от этой величины, в компенсационную обмотку соответствующей оси ДМП подают постоянный ток определенной величины, при калибровке этот процесс периодически повторяется с целью обновления калибровочных коэффициентов. 2 н.п. ф-лы, 1 ил.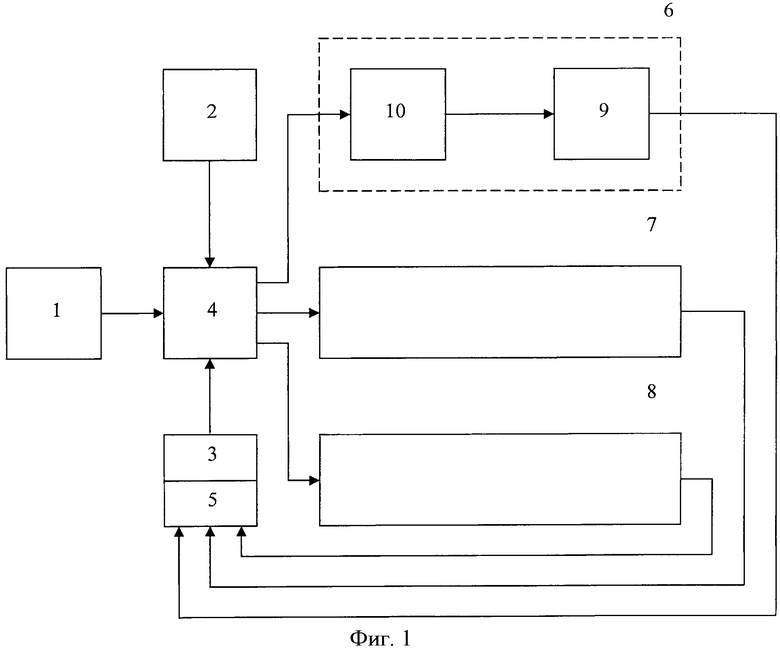
1. Интегрированная система резервных приборов, содержащая блок инерциальных датчиков информации, жидкокристаллический экран, датчик магнитного поля с компенсационными обмотками по каждой измерительной оси, соединенные с вычислителем, отличающаяся тем, что в нее дополнительно введены три канала преобразования, каждый из которых содержит буфер и регулятор напряжения, вход которого подключен к вычислителю, а выход через буфер подключен к компенсационной обмотке каждой измерительной оси датчика магнитного поля.
2. Способ калибровки датчика магнитного поля интегрированной системы резервных приборов, заключающийся в определении коэффициентов калибровки с последующим анализом их величины, отличающийся тем, что в случае превышения коэффициентами калибровки предельно допустимой величины, в компенсационную обмотку соответствующей измерительной оси датчика магнитного поля подают определенную величину постоянного тока для компенсации внешнего возмущающего магнитного поля, затем повторяют калибровку с целью определения новых коэффициентов калибровки, не выходящих за рамки предельно допустимой величины, и после чего компенсируют внешнее возмущающее магнитное поле.
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2009 |
|
RU2386927C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТОЯННЫХ ПО МАГНИТНОЙ ИНДУКЦИИ ОБМОТОК ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2005 |
|
RU2282205C1 |
| Цифровой феррозондовый магнитометр | 1980 |
|
SU920594A1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| US 7400142 B2, 15.07.2008. | |||

