Заявляемое устройство относится к области радиотехники, а именно к пассивной локации и может быть использовано в навигационных, пеленгационных, локационных средствах для визуального обнаружения и определения координат априорно неизвестных подвижных объектов с летно-подъемных средств (ЛПС). Далее под ЛПС будем понимать самолеты и вертолеты различных модификаций.
Известны устройства по пат. РФ №2251712, МПК G01S 13/66; пат. РФ №2359288, МПК G01S 5/02. Аналоги обеспечивают определение координат объектов с помощью оптико-электронных средств. Однако им присущ существенный недостаток: они размещаются на земной поверхности, вследствие чего обладают маленьким радиусом действия.
Известно устройство определения координат объектов пат. РФ №2323851, МПК В64С 31/06 «Система наблюдения за земной поверхностью с беспилотным летательным аппаратом», опубл. 10.05.2008.
Аналог содержит затягивающую лебедку, беспилотный летательный аппарат (БЛА) и наземный пункт управления (НПУ), причем БЛА состоит из последовательно соединенных контроллера, рулевого привода и аэродинамических рулей, автопилота, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательную установку, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, блок видеонаблюдения, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, а группа информационных выходов - с второй группой информационных входов контроллера, и первого приемо-передающего модуля, группа информационных входов которого соединена с пятой группой информационных выходов контроллера, третья группа информационных входов которого соединена с группой информационных выходов первого приемо-передающего модуля, а наземный пункт управления выполнен содержащим последовательно соединенные блок управления, второй приемо-передающий модуль и устройство обработки и отображения информации, вторая группа выходов блока управления является шиной управления НПУ, и соединена с затягивающей лебедкой.
Аналог предназначен для получения фотоснимков земной поверхности с высоты порядка 100 метров. Однако это устройство не обеспечивает измерение координат видимых объектов из-за отсутствия высокоточных систем навигации БЛА и определения направления на них.
Наиболее близким по своей технической сущности к заявляемому изобретению являются устройство определения координат объектов (см. пат. РФ №2513900, МПК G01S 13/42, G01S 3/14, опубл. 20.07.2014, бюл. №11).
Устройство-прототип содержит ЛПС, в качество которого используют БЛА, и НПУ, причем БЛА выполнен содержащим последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группа информационных выходов автопилота, двигательная установка, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый приемо-передающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с группой информационных выходов первого приемо-передающего модуля, и блок видеонаблюдения, а наземный пункт управления выполнен содержащим последовательно соединенные первый блок управления, предназначенный для формирования команд управления взлетом, полетом и посадкой ЛПС, второй приемо-передающий модуль и первое устройство обработки и отображения информации, передающий модуль, блок навигации ЛПС и запоминающее устройство, причем, первая группа информационных входов запоминающего устройства соединена с группой информационных выходов блока видеонаблюдения, вторая группа информационных входов соединена с группой информационных выходов блока навигации ЛПС, а группа информационных выходов запоминающего устройства соединена с группой информационных входов передающего модуля, а в наземный пункт управления введены последовательно соединенные приемный модуль и второе устройство обработки и индикации, второй блок управления, предназначенный для задания исходных данных и формирования команды на определение координат объектов, группа информационных входов которого объединена с первой группой информационных входов второго устройства обработки и отображения информации, а группа информационных выходов - со второй группой информационных входов второго устройства обработки и отображения информации.
Устройство-прототип обеспечивает повышение точности измерения координат объектов с борта ЛПС.
Однако прототипу присущи недостатки, ограничивающие его применение. Основным их них является ограниченный радиус действия, определяемый дальностью прямой видимости между НПУ и ЛПС. Результаты измерений пространственного местоположения и ориентации ЛПС, видеоизображение контролируемого объекта и его местоположение на фотокамере передают по высокоскоростному каналу связи (более 4 Мбит/с) на частотах 2,5 МГц и выше.
Кроме того, жесткое крепление камеры (блока видеонаблюдения) к борту ЛПС резко сокращает полосу обзора при полете ЛПС, что влечет за собой увеличение временных затрат на поиск и определение координат заданного объекта. Дополнительные проблемы возникают при определении координат подвижных объектов, приводящие к снижению точностных характеристик прототипа. Последние связаны с непопаданием обнаруженного объекта в центр изображения фотокамеры, усреднением последовательности результатов измерений подвижных объектов на интервале времени Δt.
Техническим результатом, на достижение которого направлено заявляемое устройство, является расширение границ контролируемого района и сокращение временных затрат на обнаружение и определение координат заданных объектов.
Технический результат достигается тем, что в устройство определения координат объектов, размещаемое на летно-подъемном средстве штатной комплектации, и содержащее передающий модуль, блок видеонаблюдения, последовательно соединенные блок навигации и запоминающее устройство, вторая группа информационных входов которого соединена с группой информационных выходов блока видеонаблюдения, на ЛПС дополнительно размещены устройство обработки и отображения информации, блок управления, опорное поворотное устройство и инерциальный измерительный модуль, причем блок видеонаблюдения и инерциальный измерительный модуль размещают совместно на опорном поворотном устройстве, группа информационных выходов инерциального измерительного модуля соединена с третьей группой информационных входов запоминающего устройства, группа информационных выходов которого соединена с группой информационных входов блока управления и первой группой информационных входов устройства обработки и отображения информации, вторая группа информационных входов которого соединена с группой информационных выходов блока управления, а группа информационных выходов соединена с группой информационных входов передающего модуля, а на подготовительном этапе и в режиме работы устройства «коррекция» группу информационных входов инерциального измерительного модуля соединяют с группой информационных выходов блока навигации.
В качестве ЛПС используют самолеты и вертолеты различных модификаций. Перенос части элементов наземного пункта управления и оператора на борт ЛПС и введение дополнительных элементов позволило расширить границы контролируемого района и сократить временные затраты на обнаружение и определение координат заданных подвижных объектов за счет оптимизации пространственной ориентации блока видеонаблюдения в процессе полета ЛПС.
Основной проблемой, возникшей при реализации заявляемого устройства, является определение с необходимой точностью пространственной ориентации блока видеонаблюдения (фотокамеры). Для этой цели в малогабаритных объектах используют инерциальные измерительные системы (ИИС) на микромеханических датчиках (MEMS), которые характеризуются недостаточными точностными характеристиками. Датчики не чувствительны к вращению Земли, обладают высоким уровнем шума и непостоянным дрейфом. Благодаря совместному использованию блока навигации, позволяющему измерять с высокой точностью угол сноса воздушного судна, и использующему сигналы навигационной спутниковой системы, и ИИС обеспечивается существенное повышение точностных характеристик предлагаемого устройства.
Предлагаемое устройство поясняется чертежами, на которых:
на фиг. 1 - показана обобщенная структурная схема устройства определения координат объектов:
а) на подготовительном этапе, в режиме «коррекция» (выставления исходных данных);
б) в режиме измерений;
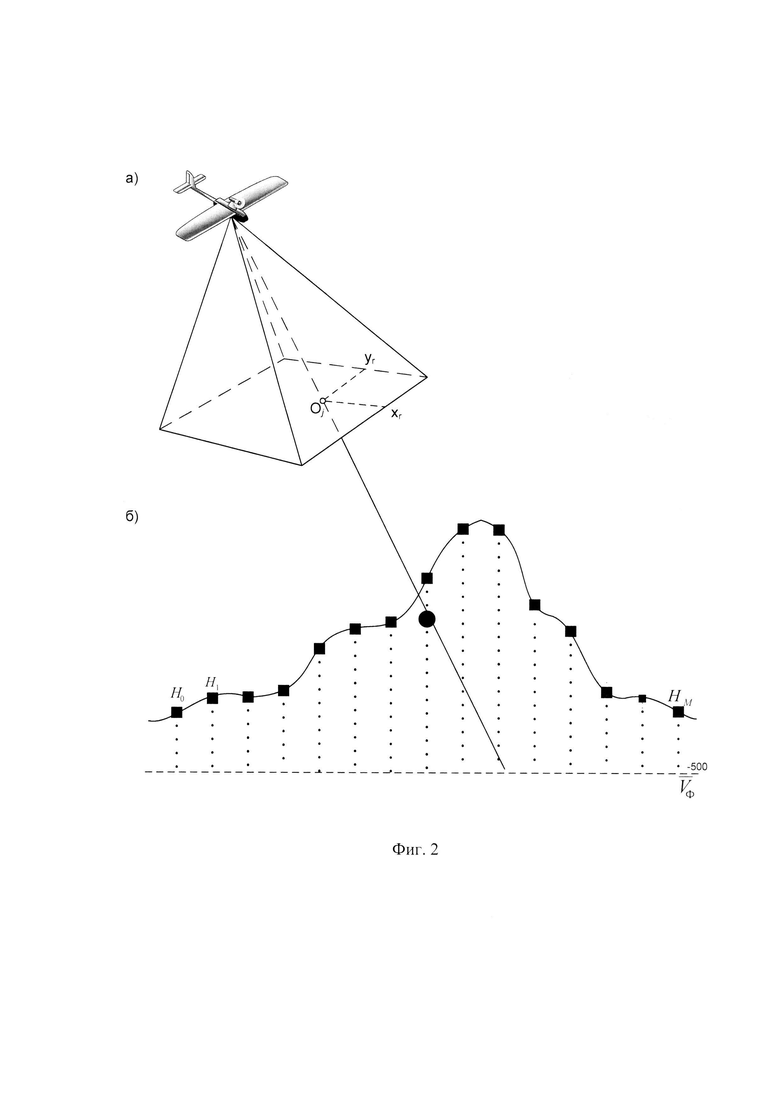
на фиг. 2 - иллюстрируется:
а) пятно засветки фотокамеры на земной поверхности с находящимся в нем объектом Oj;
б) причина возникновения ошибок в определении координат объекта при отсутствии учета рельефа местности;
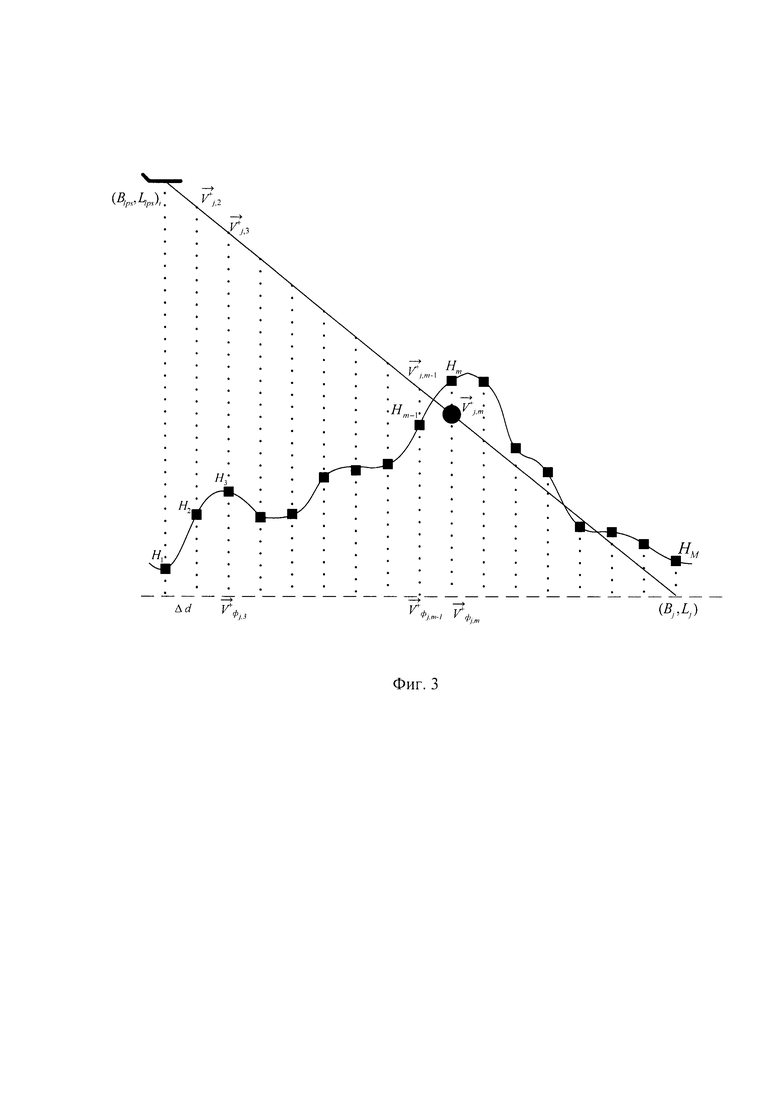
на фиг. 3 - поясняется порядок предварительного определения координат объекта;
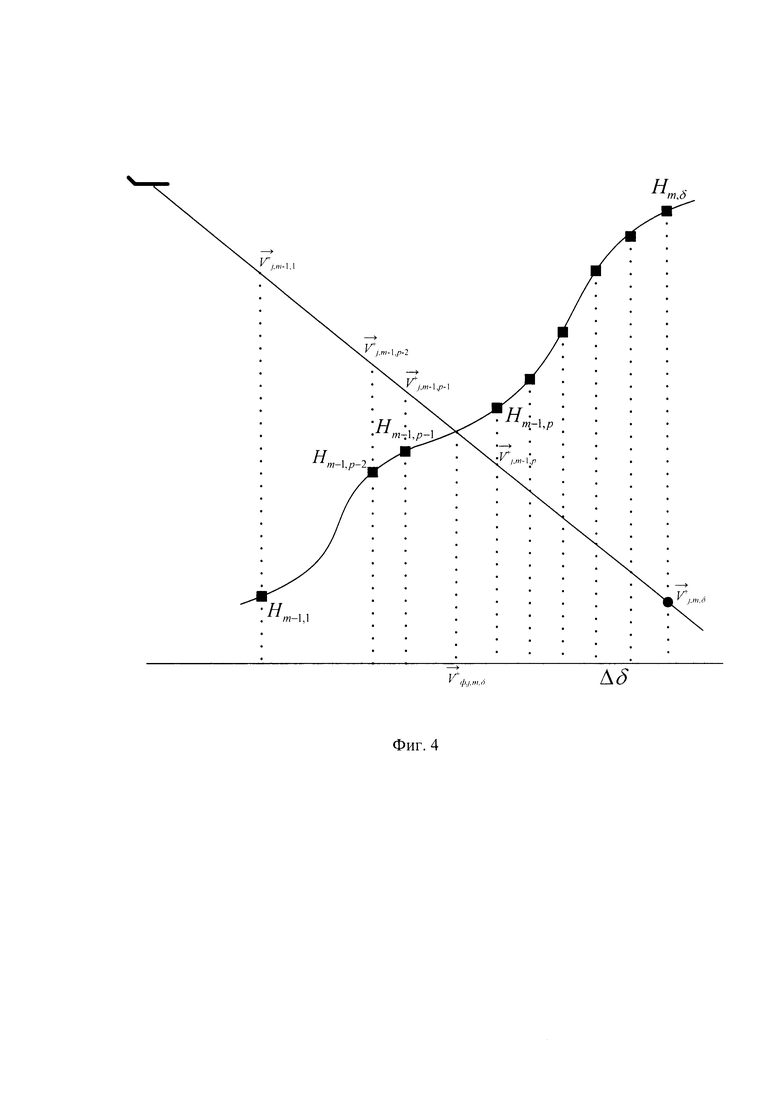
на фиг. 4 - иллюстрируется порядок определения координат объекта с заданной точностью;
на фиг. 5 - обобщенный алгоритм работы устройства определения координат объектов;
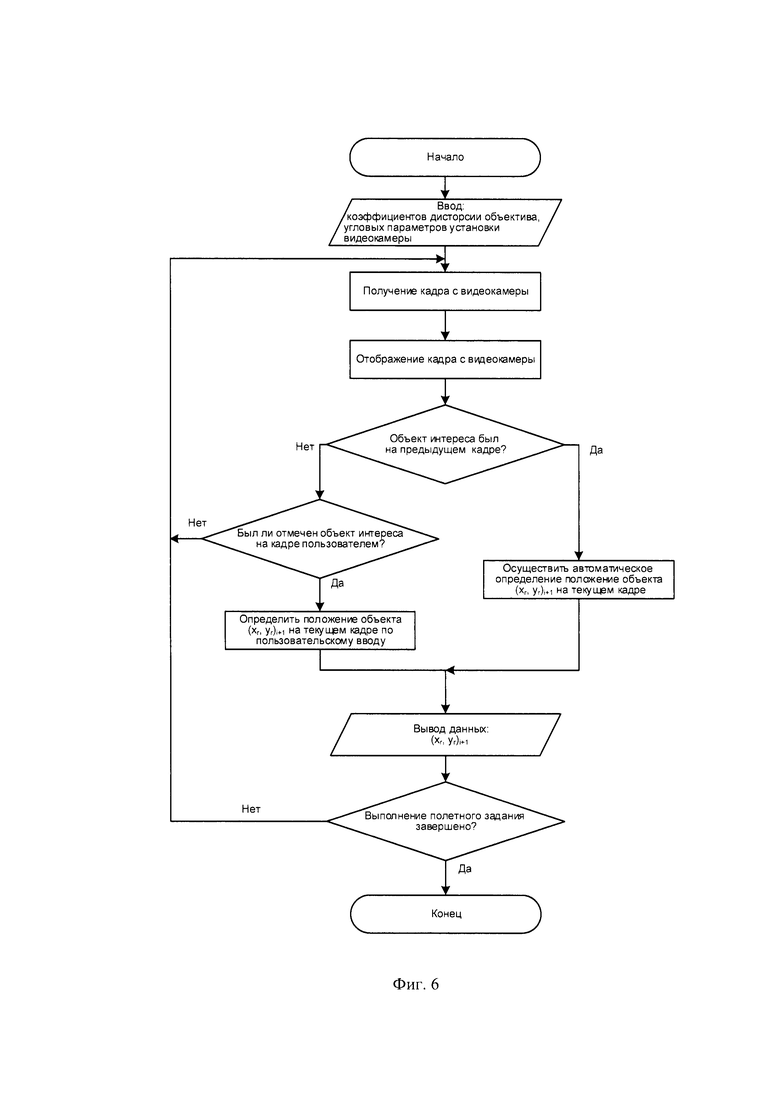
на фиг. 6 - приведен алгоритм работы подсистемы видеонаблюдения;
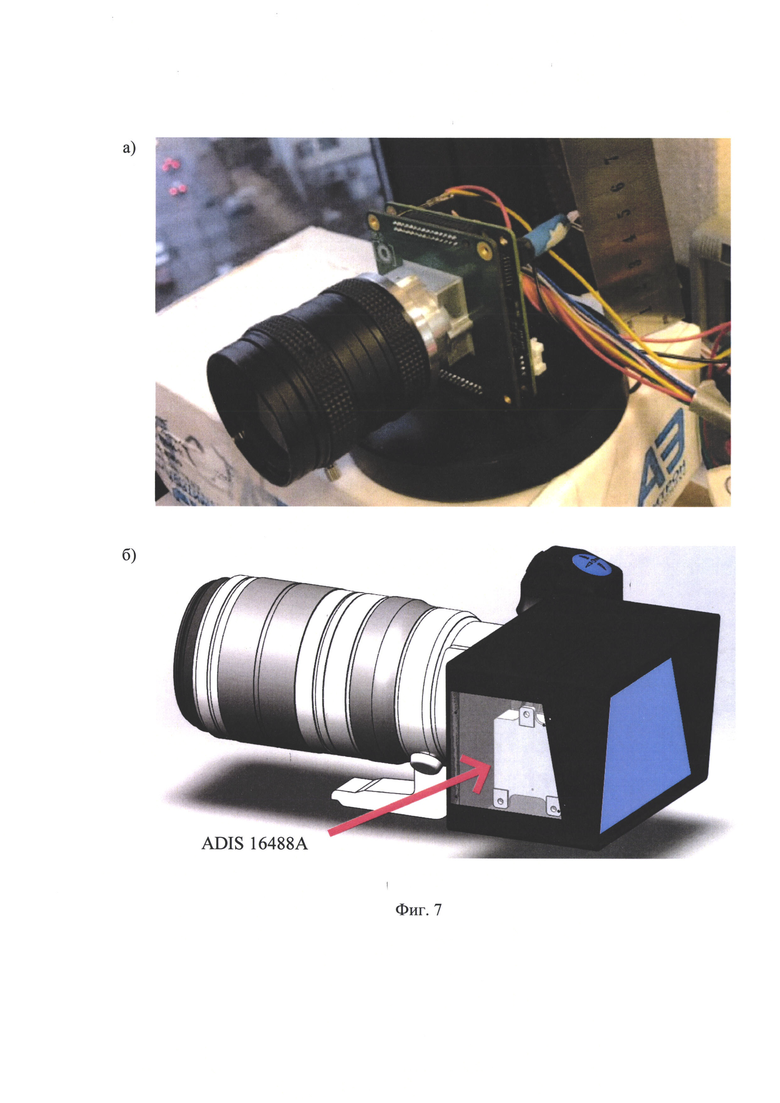
на фиг. 7 - внешний вид фотокамеры (блока 1):
а) положение составных элементов фотокамеры;
б) местоположение инерциального датчика ADIS 16488А;
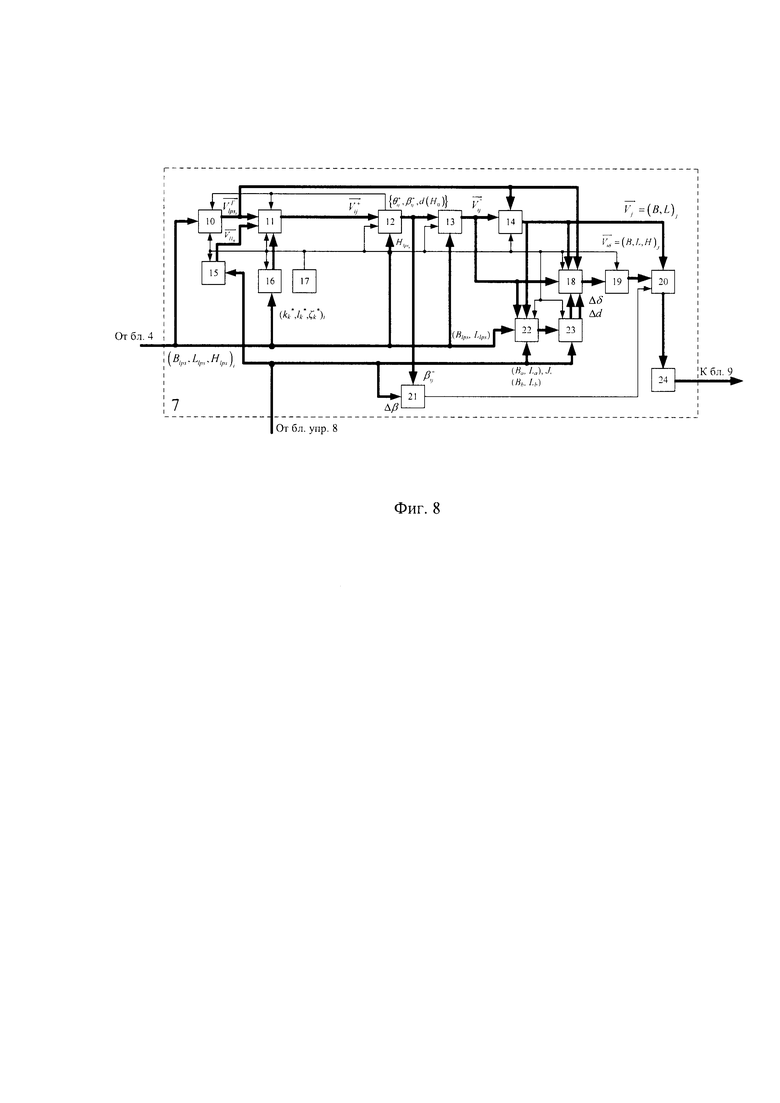
на фиг. 8 - структурная схема устройства обработки и отображения информации 7;
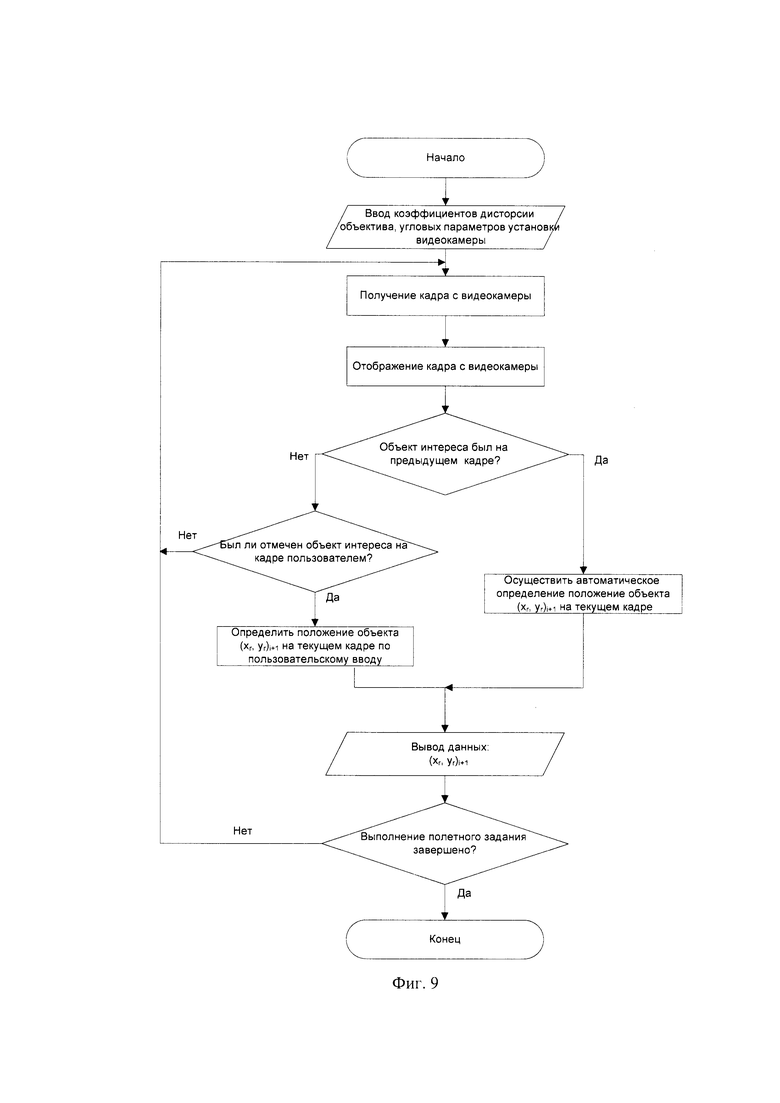
на фиг. 9 - приведен алгоритм работы блока управления 8;
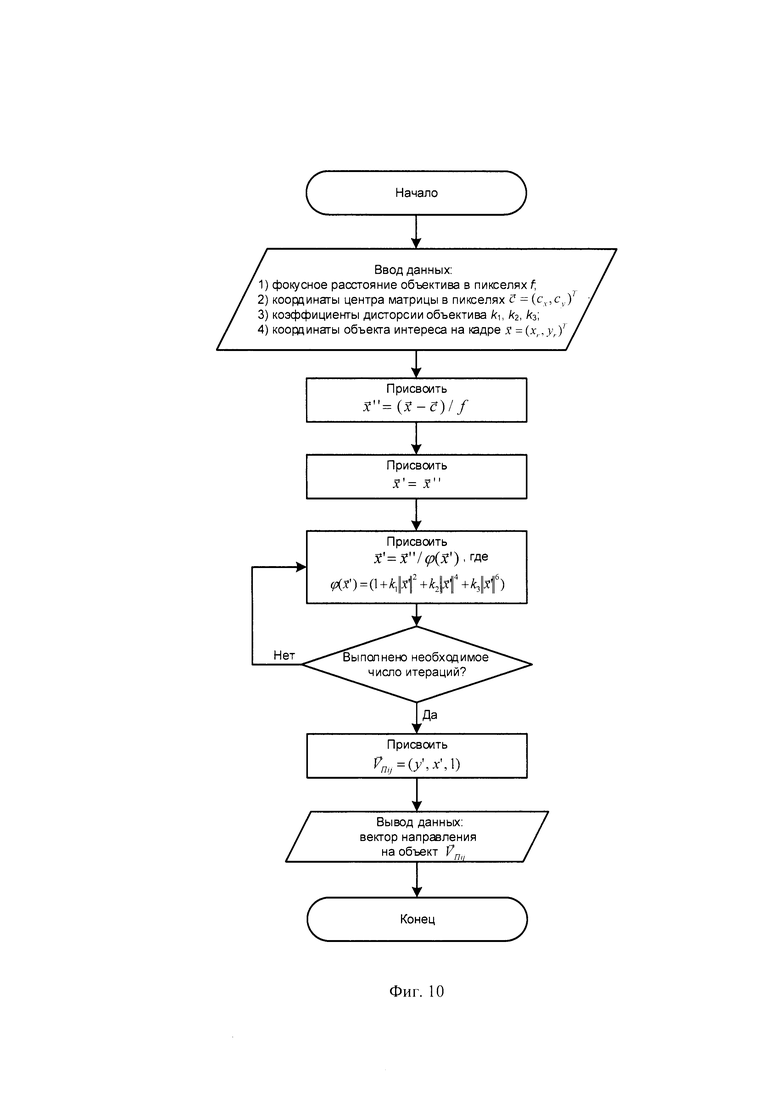
на фиг. 10 - иллюстрируется алгоритм работы шестого вычислителя по определению вектора направления на объект в системе координат фотокамеры 
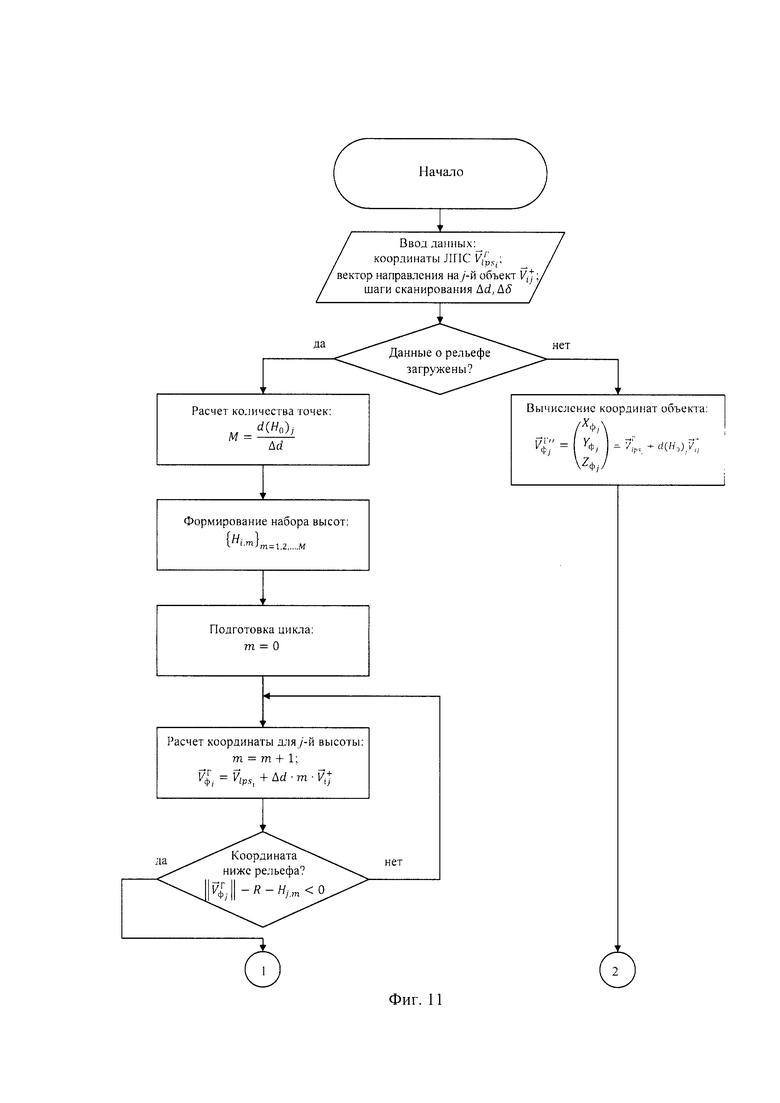
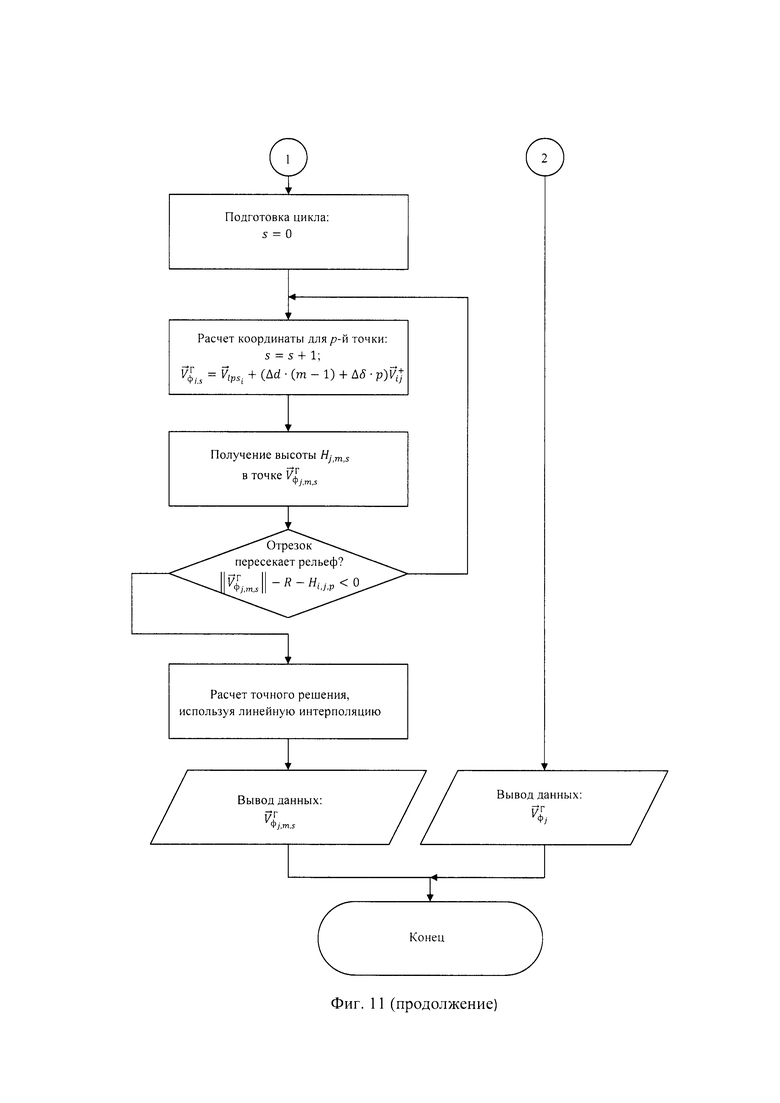
на фиг. 11 - приведен алгоритм работы седьмого вычислителя 18;
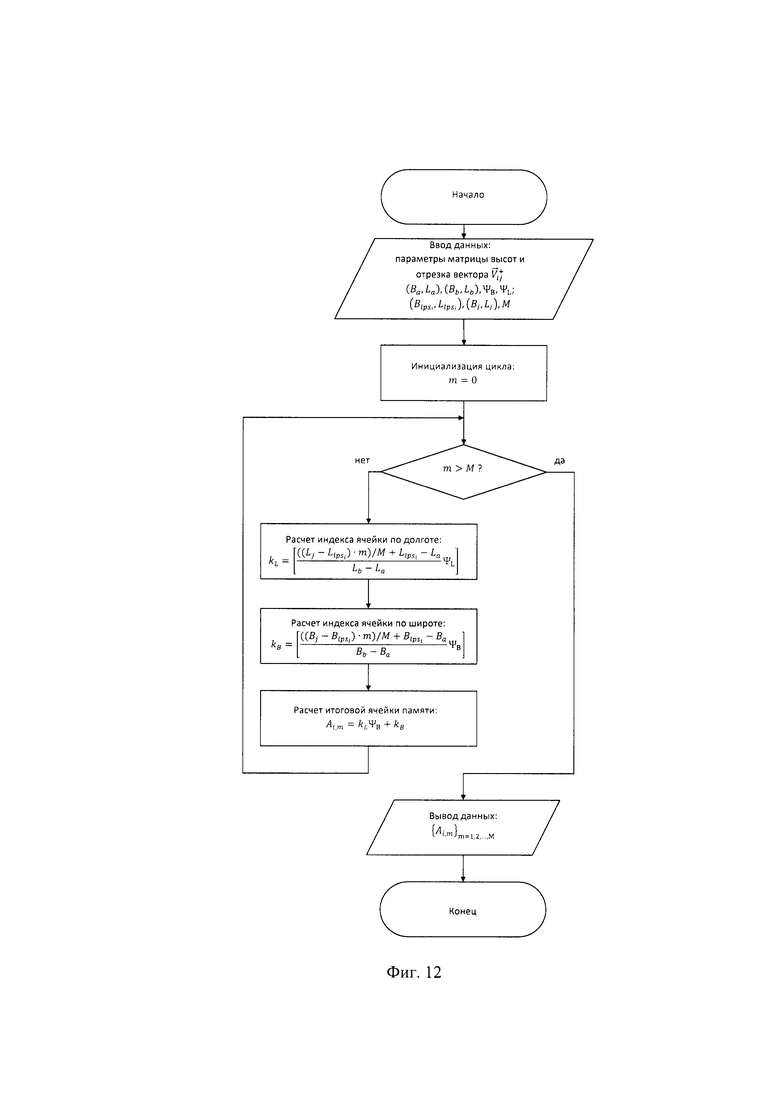
на фиг. 12 - показан алгоритм работы третьего блока управления 22;
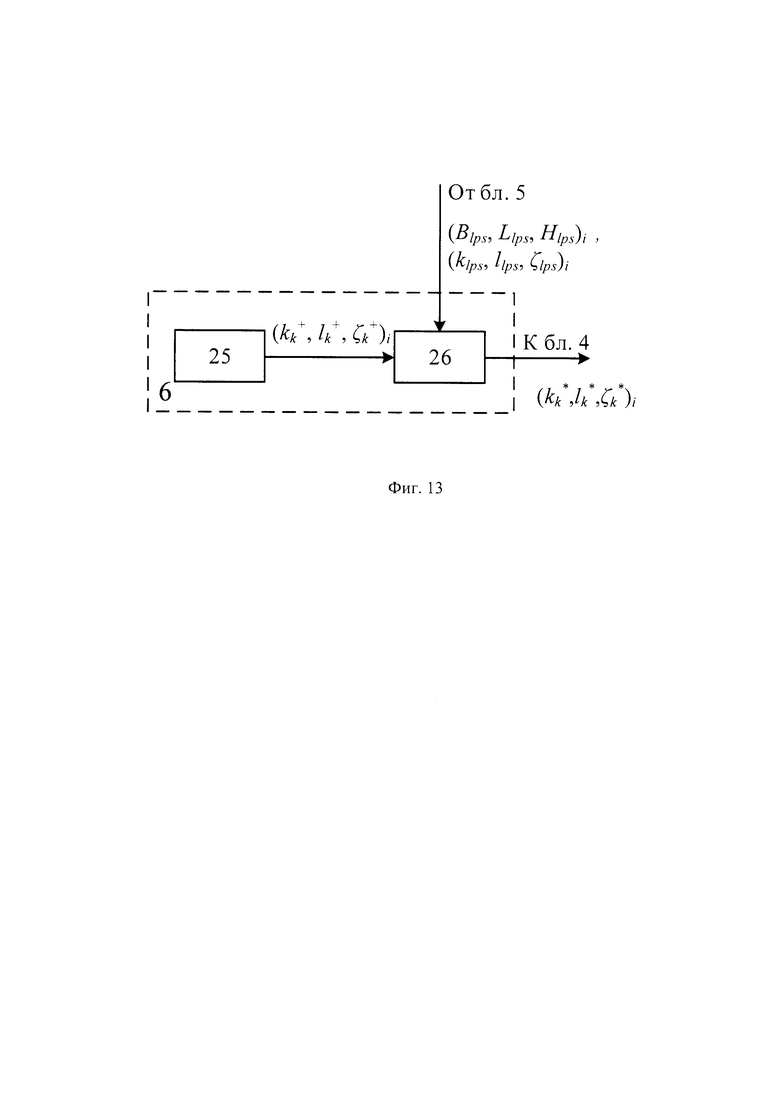
на фиг. 13 - структурная схема инерциального измерительного модуля 6;
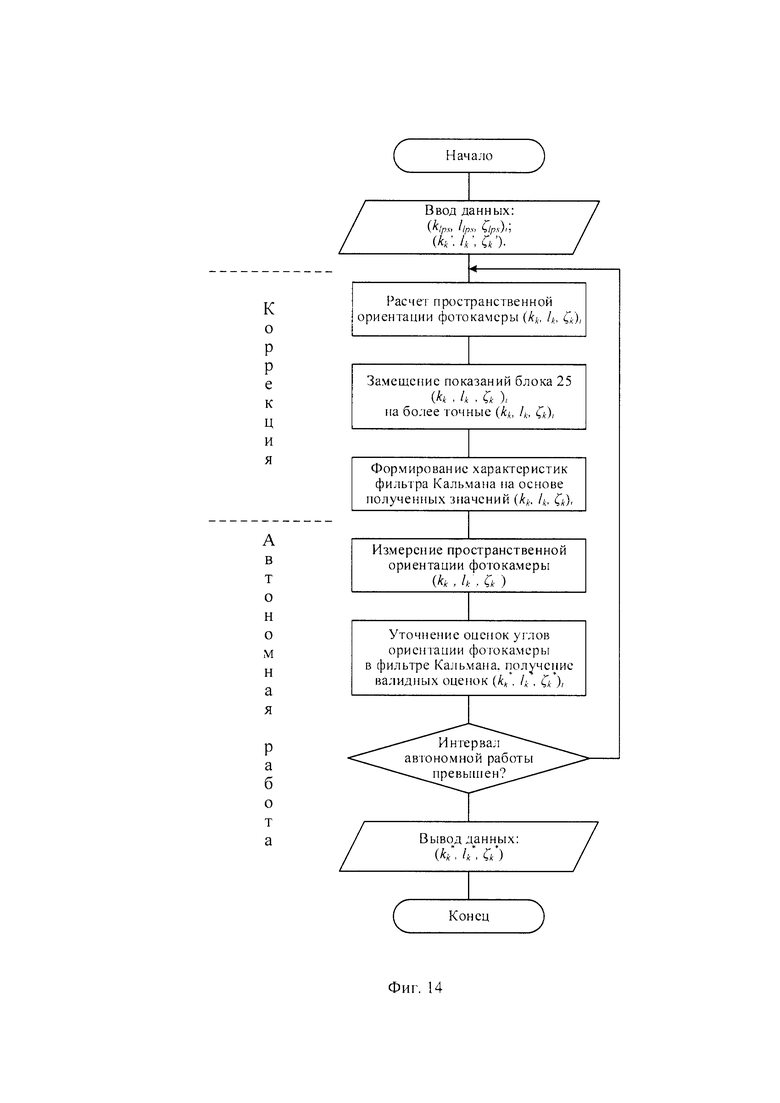
на фиг. 14 - алгоритм работы вычислителя 26.
Устройство определения координат объектов, размещаемое на ЛПС штатной комплектации, содержит последовательно соединенные блок видеонаблюдения 1, запоминающее устройство 4, блок управления 8, устройство обработки и отображения информации 7 и передающий модель 9, блок навигации 5, опорное поворотное устройство 3 с шиной управления 2, инерциально-измерительный модель 6, совместно размещенный с блоком видеонаблюдения 1 на опорном поворотном устройстве 3, группа входов управления которого является входной шиной 2 устройства определения координат объектов, а группа информационных выходов блока 6 соединена с третьей группой информационных входов запоминающего устройства 4, первая группа информационных входов которого соединена с группой информационных выходов блока навигации 5, а группа информационных входов блока управления 8 объединена с первой группой информационных входов устройства обработки и отображения информации 7, а на подготовительном этапе и в режиме работы устройства «коррекция» группу информационных входов инерциального измерительного модуля 6 соединяют с группой информационных выходов блока навигации 5.
Структурная схема устройства определения координат объектов представлена на фиг. 1, где:
1 - блок видеонаблюдения (БВ);
2 - входная шина устройства определения координат объектов;
3 - опорное поворотное устройство (ОПУ);
4 - запоминающее устройство (ЗУ);
5 - блок навигации (БН);
6 - инерциальный измерительный модуль (ИИМ);
7 - устройство обработки и отображения информации (УООИ);
8 - блок управления (БУ);
9 - передающий модель.
Работа устройства (см. фиг. 1а, б, 5) осуществляется следующим образом. На подготовительном этапе блок видеонаблюдения 1 (фотокамеру), инерциальный датчик ADIS 16488А (блок 25) и вычислитель 26 (см. фиг. 13) из состава модуля 6 совместно размещают на опорное поворотное устройство 3. Названные элементы устанавливают под фюзеляжем ЛПС (в этом случае управление блоком 3 оператор осуществляет с помощью выносного пульта управления) или на остеклении борта воздушного судна с внутренней его стороны. Тогда становится доступным для оператора непосредственное (ручное) управление блоком 3 (фотокамерой 1).
На подготовительном этапе фиксируют положение блока 3 (блоков 1 и 6) и определяют ориентацию фотокамеры 1 относительно борта ЛПС. Результаты измерений  фиксируют (см. фиг. 13) в блоке 6 (блоке 26). Здесь
фиксируют (см. фиг. 13) в блоке 6 (блоке 26). Здесь  - угол крена, тангажа и курса блока 1. В таком положении дальнейшая работа предлагаемого устройства (см. фиг. 1а) в основном совпадает с работой устройства прототипа. Отличие состоит в том, что принятие решения на определение координат осуществляет оператор, находящийся на борту ЛПС. Кроме того, все операции по определению координат также выполняют на воздушном судне с помощью блоков 1, 4, 5, 7 и 8, реализация которых в основном аналогична соответствующим блокам 5, 6, 7, 16 и 18, прототипа. Блок 7 (блок 16 прототипа) претерпел изменения в связи с тем, что для его работы не требуются сведения о пространственной ориентации ЛПС. Последние используют в блоке 6 для коррекции данных о пространственной ориентации БВ 1. С этой целью группу информационных выходов БН 5 соединяют с группой информационных входов ИИМ 6 (см. фиг. 13). Жесткая фиксация блока видеонаблюдения 1 с ЛПС позволяет отслеживать пространственную ориентацию с реализованной блоком 5 точностью. Кроме того, в блоке 7 исключено усреднение последовательности результатов измерений координат подвижного объекта. Учет взаимной ориентации фотокамеры 1 в исходном положении и ЛПС выполняет блок 6. Результаты измерений координат обнаруженного объекта потребителю передают с помощью блока 9 по низкоскоростному каналу связи. Это становится возможным в связи с резким сокращением объема передаваемой информации. При этом в качестве блока 9 может быть использовано оборудование, работающее в ВЧ-диапазоне радиоволн, спутниковой радиосвязи и др., у которого отсутствует ограничения в заданных пределах по дальности связи. Для этой цели может быть задействован и штатный канал командной связи ЛПС.
- угол крена, тангажа и курса блока 1. В таком положении дальнейшая работа предлагаемого устройства (см. фиг. 1а) в основном совпадает с работой устройства прототипа. Отличие состоит в том, что принятие решения на определение координат осуществляет оператор, находящийся на борту ЛПС. Кроме того, все операции по определению координат также выполняют на воздушном судне с помощью блоков 1, 4, 5, 7 и 8, реализация которых в основном аналогична соответствующим блокам 5, 6, 7, 16 и 18, прототипа. Блок 7 (блок 16 прототипа) претерпел изменения в связи с тем, что для его работы не требуются сведения о пространственной ориентации ЛПС. Последние используют в блоке 6 для коррекции данных о пространственной ориентации БВ 1. С этой целью группу информационных выходов БН 5 соединяют с группой информационных входов ИИМ 6 (см. фиг. 13). Жесткая фиксация блока видеонаблюдения 1 с ЛПС позволяет отслеживать пространственную ориентацию с реализованной блоком 5 точностью. Кроме того, в блоке 7 исключено усреднение последовательности результатов измерений координат подвижного объекта. Учет взаимной ориентации фотокамеры 1 в исходном положении и ЛПС выполняет блок 6. Результаты измерений координат обнаруженного объекта потребителю передают с помощью блока 9 по низкоскоростному каналу связи. Это становится возможным в связи с резким сокращением объема передаваемой информации. При этом в качестве блока 9 может быть использовано оборудование, работающее в ВЧ-диапазоне радиоволн, спутниковой радиосвязи и др., у которого отсутствует ограничения в заданных пределах по дальности связи. Для этой цели может быть задействован и штатный канал командной связи ЛПС.
В случае необходимости изменения во время полета ориентации камеры (блока 1) относительно борта ЛПС предлагаемое устройство переходит в режим автономной навигации. На первом этапе при визуальном обнаружении j-го объекта оператором принимается решения о необходимости измерения его координат, а блок 1 наводится в его направлении. С этой целью местоположение объекта на кадре фотокамеры первоначально задается (определяется) оператором с помощью визира.
Полученные координаты j-го объекта  на кадре (см фиг. 2а) по аналогии с прототипом задают в пикселях, при этом их отсчитывают от верхнего левого угла кадра.
на кадре (см фиг. 2а) по аналогии с прототипом задают в пикселях, при этом их отсчитывают от верхнего левого угла кадра.
На следующем этапе необходимо преобразовать координаты j-го объекта  в кадре на направление на объект в системе координат фотокамеры
в кадре на направление на объект в системе координат фотокамеры  Данная операция выполняется в соответствии с выражением
Данная операция выполняется в соответствии с выражением

где  ƒ - фокусное расстояние объектива фотокамеры, пересчитанное в пиксели матрицы (кадра), (сх,су)T - координаты центра матрицы в пикселях, k1, k2, k3 - измеренные коэффициенты дисторсии объектива (см. Szeliski, Richard. Computer: Algorithms and Applications. - Sprintger, 2010). Произведя переобозначение
ƒ - фокусное расстояние объектива фотокамеры, пересчитанное в пиксели матрицы (кадра), (сх,су)T - координаты центра матрицы в пикселях, k1, k2, k3 - измеренные коэффициенты дисторсии объектива (см. Szeliski, Richard. Computer: Algorithms and Applications. - Sprintger, 2010). Произведя переобозначение  выражение 1 принимает вид
выражение 1 принимает вид

где  . Вектор
. Вектор  определяют на основе известных параметров фотокамеры и координат j-го объекта на кадре
определяют на основе известных параметров фотокамеры и координат j-го объекта на кадре

Таким образом, обозначив  получаем уравнение, решением которого является искомый вектор
получаем уравнение, решением которого является искомый вектор 

Численное значение вектора  находят методом простых итераций.
находят методом простых итераций.
Направление на j-й объект  определено без учета ориентации фотокамеры в пространстве. В силу названной причины в предлагаемом устройстве на первом этапе учитывают ориентацию фотокамеры в направлении j-го объекта и координаты ЛПС в момент выполнения измерений ti. Измерение пространственной ориентации фотокамеры выполняют с помощью инерциального измерительного модуля 6. На втором этапе определения координат объектов учитывают особенности рельефа местности района измерений. Данные этапы достаточно полно освещены в пат. РФ №2419106, МПК G01S 13/46, опубл. 20.05.2011 и пат. РФ №2458360 МПК G01S 13/46, 5/02, 3/14, опубл. 1.08.2012.
определено без учета ориентации фотокамеры в пространстве. В силу названной причины в предлагаемом устройстве на первом этапе учитывают ориентацию фотокамеры в направлении j-го объекта и координаты ЛПС в момент выполнения измерений ti. Измерение пространственной ориентации фотокамеры выполняют с помощью инерциального измерительного модуля 6. На втором этапе определения координат объектов учитывают особенности рельефа местности района измерений. Данные этапы достаточно полно освещены в пат. РФ №2419106, МПК G01S 13/46, опубл. 20.05.2011 и пат. РФ №2458360 МПК G01S 13/46, 5/02, 3/14, опубл. 1.08.2012.
Координаты ЛПС  а, следовательно, и фотокамеры 1, измеренные блоком 5 в момент времени ti, преобразуют в геоцентрическую систему координат:
а, следовательно, и фотокамеры 1, измеренные блоком 5 в момент времени ti, преобразуют в геоцентрическую систему координат:
где Blps, Llps, Hlps - соответственно широта, долгота и высота местоположения ЛПС.
В преобразовании вектора направления на j-й объект  учитывают измеренную блоком 6 ориентацию фотокамеры. Коррекцию
учитывают измеренную блоком 6 ориентацию фотокамеры. Коррекцию  осуществляют в плоскости трех углов Эйлера: крена
осуществляют в плоскости трех углов Эйлера: крена  тангажа
тангажа  и склонения
и склонения  Исходный вектор
Исходный вектор  последовательно перемножают на три соответствующие углам Эйлера матрицы поворота (см. фиг. 2)
последовательно перемножают на три соответствующие углам Эйлера матрицы поворота (см. фиг. 2)

где 
Уточненные значения азимута  и угла места
и угла места  определяют из выражения (6) следующим образом:
определяют из выражения (6) следующим образом:

Здесь вектор  находится в нормальной системе координат: ОХ+ - направление на север, OY+ - на восток, OZ+ - к центру Земли.
находится в нормальной системе координат: ОХ+ - направление на север, OY+ - на восток, OZ+ - к центру Земли.
Для нахождения расстояния между ЛПС и j-м объектом  необходимо учесть шарообразный характер поверхности Земли. Иначе, данная задача может быть интерпретирована как нахождение расстояния
необходимо учесть шарообразный характер поверхности Земли. Иначе, данная задача может быть интерпретирована как нахождение расстояния  , на котором вектор
, на котором вектор  пересечется с «круглой» Землей на высоте
пересечется с «круглой» Землей на высоте  метров:
метров:

где D - дискриминант квадратного уравнения:  R - радиус Земли, R=6370000 м. Следует отметить, что расстояние
R - радиус Земли, R=6370000 м. Следует отметить, что расстояние  возможно определить при условии D≥0. В противном случае начинают новый цикл измерений пространственных параметров j-го объекта
возможно определить при условии D≥0. В противном случае начинают новый цикл измерений пространственных параметров j-го объекта  и
и 
Нормальная система координат, в которой на данном этапе находится вектор  расположена с некоторым поворотом, который зависит от широты и долготы местоположения ЛПС. Для окончательного перехода в геоцентрическую систему координат необходимо довернуть вектор
расположена с некоторым поворотом, который зависит от широты и долготы местоположения ЛПС. Для окончательного перехода в геоцентрическую систему координат необходимо довернуть вектор  на широту ЛПС и π/2 минус долготу ЛПС
на широту ЛПС и π/2 минус долготу ЛПС  используя матрицы поворота, а затем перенести центр системы координат в центр Земли используя геоцентрические координаты ЛПС. В результате имеем истинный вектор
используя матрицы поворота, а затем перенести центр системы координат в центр Земли используя геоцентрические координаты ЛПС. В результате имеем истинный вектор  направления на j-й объект
направления на j-й объект

где 
На этом завершается первый этап измерений.
На следующем этапе результаты вычислений угла места  сравнивают с пороговым значением Δβ, определяющим заданную потенциальную точность измерения местоположения объектов. Следует отметить, что угол места на источник
сравнивают с пороговым значением Δβ, определяющим заданную потенциальную точность измерения местоположения объектов. Следует отметить, что угол места на источник  соответствует горизонту,
соответствует горизонту,  соответствует зениту.
соответствует зениту.
Координаты объекта на «круглой» Земле в геоцентрической системе координат по направлению и расстоянию на высоте Н0 могут быть найдены с помощью выражения:

Переход от (11) к более удобной географической системе координат  осуществляют следующим образом:
осуществляют следующим образом:

где 
При малых значениях  (обеспечивается низкая точность измерения координат объекта), а также при выполнении пороговых условий и отсутствии цифровой карты рельефа местности района измерений, определяют координаты точки пересечения истинного вектора направления на j-й объект
(обеспечивается низкая точность измерения координат объекта), а также при выполнении пороговых условий и отсутствии цифровой карты рельефа местности района измерений, определяют координаты точки пересечения истинного вектора направления на j-й объект  с «круглой» Землей, которые далее поступают на выход и используются в качестве искомой величины.
с «круглой» Землей, которые далее поступают на выход и используются в качестве искомой величины.
При выполнении пороговых условий  и наличия цифровой карты рельефа района измерений становится возможным более точное измерение координат, которое в свою очередь выполняют в два этапа. На первом этапе формируют последовательный набор значений высот {Hi,m}, m=1, 2, …, М, которые соответствуют равномерно распределенным координатам на отрезке, соединяющем координаты ЛПС
и наличия цифровой карты рельефа района измерений становится возможным более точное измерение координат, которое в свою очередь выполняют в два этапа. На первом этапе формируют последовательный набор значений высот {Hi,m}, m=1, 2, …, М, которые соответствуют равномерно распределенным координатам на отрезке, соединяющем координаты ЛПС  и j-го объекта (Bj, Lj) (см. фиг. 3). При этом количество названных точек М находится из соотношения:
и j-го объекта (Bj, Lj) (см. фиг. 3). При этом количество названных точек М находится из соотношения:  , где Δd - шаг сканирования по вектору направления
, где Δd - шаг сканирования по вектору направления  на j-й объект в момент времени ti. Значение Δd определяется заданной точностью определения координат объекта на первом (предварительном) этапе измерений, например, Δd=500 м. Рассчитывают координаты
на j-й объект в момент времени ti. Значение Δd определяется заданной точностью определения координат объекта на первом (предварительном) этапе измерений, например, Δd=500 м. Рассчитывают координаты  соответствующие дискретно выделенным высотам рельефа местности Him. За предварительные координаты j-го объекта
соответствующие дискретно выделенным высотам рельефа местности Him. За предварительные координаты j-го объекта  принимают первую точку разбиения вектора
принимают первую точку разбиения вектора  находящуюся ниже уровня рельефа местности.
находящуюся ниже уровня рельефа местности.
На втором этапе измерений уточняют местоположение j-го объекта путем выделения соседней точки разбиения  находящейся над рельефом местности (см. фиг. 4). Отрезок
находящейся над рельефом местности (см. фиг. 4). Отрезок  вектора направления на j-й объект делят
вектора направления на j-й объект делят  на δ равных интервалов, Δδ<<Δd, где Δδ - шаг сканирования по выделенному отрезку истинного вектора направления
на δ равных интервалов, Δδ<<Δd, где Δδ - шаг сканирования по выделенному отрезку истинного вектора направления  . Последний определяется конечной заданной точностью измерения координат объектов и разрешающей способностью (дискретностью) цифровой карты местности. Для названных точек вычисляют координаты
. Последний определяется конечной заданной точностью измерения координат объектов и разрешающей способностью (дискретностью) цифровой карты местности. Для названных точек вычисляют координаты  и соответствующие им значения высот рельефа местности Hj,m,δ. За точные координаты j-го объекта на основе линейной интерполяции принимают значение
и соответствующие им значения высот рельефа местности Hj,m,δ. За точные координаты j-го объекта на основе линейной интерполяции принимают значение  находящееся между соседними точками р и р-1, p∈δ, расположенные выше и ниже рельефа местности
находящееся между соседними точками р и р-1, p∈δ, расположенные выше и ниже рельефа местности

где 
Результаты вычислений координат  преобразуют в удобную географическую систему координат
преобразуют в удобную географическую систему координат  в соответствии с выражением (12). Соответствующее значение Hjδ берется из массива цифровой карты рельефа местности.
в соответствии с выражением (12). Соответствующее значение Hjδ берется из массива цифровой карты рельефа местности.
При выполнении измерений над морской поверхностью последовательный набор высоты {Hi,rn}, m=1, 2, …, М, является постоянной стационарной величиной m1=m2…=mM=0, а необходимость в выполнении операции (13) отпадает.
Предлагаемое устройство предназначено для определения координат подвижных объектов, например, кораблей. В связи с этим повышение точностных характеристик устройства за счет совместной обработки последовательности видеокадров, как это предлагается в прототипе, невозможно.
Таким образом на борту ЛПС существует возможность в оперативном режиме определять координаты объектов на основе видеоизображения (см. фиг. 6). Последнее полученное блоком 1 совместно с данными о пространственной ориентации фотокамеры (определенные блоком 6) и ее пространственном местоположении (измеренное блоком 5) через запоминающее устройство 4 (буферная память) поступают на информационные входы блоков 7 и 8. Благодаря данным телеметрии фотокамеры и положению объекта на кадре в блоке 7 рассчитываются географические координаты интересующего объекта.
В функции блока 4 входит совместная запись кадров видеоизображения с блока 1 и соответствующих им данных о пространственном положении фотокамеры с выходов блоков 5 и 6.
Заявляемое устройство поочередно находится в двух устойчивых состояниях: режим «коррекция» (задания исходного состояния блока 6 и уточнения его показаний) и рабочем (автономном) режиме длительностью до 10 минут. В первом из них (см. фиг. 1а) фотокамера 1 находится в исходном (фиксированном) положении с априорно известной ориентацией относительно борта ЛПС. При этом определение ее текущей ориентации в пространстве  осуществляется блоком 26 (см. фиг. 1а и 13) на основе измерений
осуществляется блоком 26 (см. фиг. 1а и 13) на основе измерений  и
и  . В этом режиме группа информационных выходов 5 подключается к группе информационных входов блока 6 (блока 26). Интегрированная система блоков 5 и 6 обеспечивает максимальную точность измерения пространственной ориентации фотокамеры 1.
. В этом режиме группа информационных выходов 5 подключается к группе информационных входов блока 6 (блока 26). Интегрированная система блоков 5 и 6 обеспечивает максимальную точность измерения пространственной ориентации фотокамеры 1.
В режиме автономной работы блока 1 (см. фиг. 1б) определение его пространственной ориентации осуществляет блок 6 в течении ограниченного времени (до 10 минут). Это связно с ограниченными показаниями стабильности дрейфа гироскопа блока 25. Совместное использование инерциальных измерителей (блок 25) в совокупности с фильтром Калмана (оценивающего ошибки блока 25 на фоне результатов измерений спутниковой навигационной системы блока 5) позволяет максимально повысить точность определения координат объектов в автономном режиме «с руки».
Все функциональные элементы и блоки предлагаемого устройства широко освещены в литературе и серийно выпускается.
Блок видеонаблюдения 1 (см. фиг. 7а) может быть реализован с помощью цифровой фотокамеры «Пересвет-25», выпускаемой ООО «Специальный Технологический Центр». Последняя построена на базе современного светочувствительного датчика Gpixel Gmax 0505. Благодаря использованию матрицы с оптическим форматом 1.1 дюйм достигнута возможность укомплектования фотокамеры объективами на базе байонета C-mount. Последнее позволяет уменьшить рабочий отрезок (заднее фокусное расстояние) до 17 мм. В результате уменьшился размер самой фотокамеры и ее масса.
Принимаемый светочувствительный датчик основан на технологии глобального затвора, что позволяет исключить из состава фотокамеры внешнее затворное устройство увеличив ее ресурс. Благодаря экспонированию всех строк изображения одновременно не наблюдается характерных для фотокамер со скользящих затвором (Rolling shutter) искажений объектов. Последние не позволяют превысить точность координатометрии по ортофотоплану в 1 метр. Внешний вид фотокамеры (блок 1) приведен на фиг. 7а, б.
Опорно-поворотное устройство 3 предназначено для совместного размещения на нем фотокамеры 1 и инерциального измерительного модуля 6 (блоков 25 и 26) для осуществления последними измерения пространственной ориентации блока 1. В настоящее время они широко представлены на рынке (см. интернет ресурс bic-in-form.ru/products/oporno-povorotnyie-ustrojstva/vzryivozashhishhyonnyie-oporno-povorotnyie-ustrojstva/ptr-407ex/ Обр. 16.01.2022).
Блок навигации 5 предназначен для высокоточного определения местоположения ЛПС (фотокамеры 1) и его пространственной ориентации. На его выходе формируются данные о широте Blps, долготе Llps и высоте Hlps местоположения ЛПС (Blps, Llps, Hlps)i и его пространственной ориентации (klps, llps, ζlps)i в момент времени, где klps - угол крена, llps - тангажа и ζlps - склонения. Выполняется для различных условий эксплуатации в соответствии с пат. РФ №2514197, №2553270 или №2740606.
Инерциальный измерительный модуль 6 предназначен для непрерывного определения в режиме реального времени пространственных параметров блока видеонаблюдения 1: линейной скорости и ускорения, угловой ориентации (истинного курса, склонения ζk, крена kk и тангажа lk, угловой скорости вращения). Может быть реализован (см. фиг. 13) на основе последовательно соединенных инерциального датчика 25 тактического класса с десятью степенями свободы ADIS 16488А фирмы Analog Devices Inc. (см. интернет ресурс www.analog.com/ru/products/adis16488a. Обр. 13.01.2022) и вычислителя 26. Порядок использования инерциальных датчиков рассмотрен в статье И. Нагин, Д. Малафеева. МЭМС акселерометры, магнитометры и углы ориентации (см. интернет ресурс habr.com/ru/post/491476. Обр. 13.01.2022).
Главными составляющими блока 25 являются три гироскопа и три акселерометра, расположенные по трем различным взаимно перпендикулярным осям, что позволяет измерять ускорение и угловую скорость вращения объекта в трехмерном пространстве. Размещаются блоки 25 и 26 непосредственно в фотокамере 1 (см. фиг. 7б). Для запуска работы блока 6 необходимо ввести с группы информационных выходов блока 5 начальные значения координат местоположения ЛПС, его скорость и параметры ориентации в вычислитель 26.
Кроме того, на подготовительном этапе измеряют и запоминают в блоке 26 пространственную ориентацию блока видеонаблюдения 1 (фотокамеры)  относительно борта ЛПС при ее нахождении в исходном (фиксированном) положении. Здесь
относительно борта ЛПС при ее нахождении в исходном (фиксированном) положении. Здесь  - углы крена, тангажа и курса соответственно.
- углы крена, тангажа и курса соответственно.
Определение углового положения блока 25, а, следовательно, и фотокамеры 1, по отношению к используемой навигационной системе координат составляет суть режима коррекции блока 6 и устройства в целом. После завершения этого процесса инерциальный модуль 6 может перейти в режим навигации, а заявляемое устройство в режим автономного «с руки» определения координат объектов (см. фиг. 1б). Важнейшим элементом инерциального измерительного модуля 6 является фильтр Калмана, реализованный в вычислителе 26. Он решает задачу оценивания ошибок блока 25 на фоне измерений спутниковой навигационной системы (блока 5). Для этой цели в фильтр Калмана заложена модель погрешностей блоков 25 и 5 (см. Приложение).
Режим «коррекция» выполняют на подготовительном этапе работы устройства и периодически во время равномерного прямолинейного полета длительностью не более 7 минут. При этом группу информационных выходов БН 1 подключают к группе информационных входов НИМ 6 (блока 26). За это время в блоке 26 выполняют замещение получаемых блоком 25 значений пространственных параметров фотокамеры  на
на  . Последние рассчитывают в блоке 26 на основе априорно известной ориентации блока 1
. Последние рассчитывают в блоке 26 на основе априорно известной ориентации блока 1  и данных блока 5 о пространственной ориентации ЛПС в i-й момент времени
и данных блока 5 о пространственной ориентации ЛПС в i-й момент времени  . Эту операцию выполняют в плоскости трех углов Эйлера путем умножения матриц поворота вокруг осей крена, тангажа и склонения углов установки фотокамеры 1 относительно борта ЛПС на матрицы поворота вокруг углов ориентации ЛПС в i-й момент времени (по аналогии с выражениями (6) и (7) устройства-прототипа) и берущих свое начало в координатах съемки (с коэффициентами [1,0,0]Т).
. Эту операцию выполняют в плоскости трех углов Эйлера путем умножения матриц поворота вокруг осей крена, тангажа и склонения углов установки фотокамеры 1 относительно борта ЛПС на матрицы поворота вокруг углов ориентации ЛПС в i-й момент времени (по аналогии с выражениями (6) и (7) устройства-прототипа) и берущих свое начало в координатах съемки (с коэффициентами [1,0,0]Т).
После завершения режима «коррекция» блок видеонаблюдения 1 (фотокамера) может покинуть исходное положение и перейти в режим автономной работы (фиг. 16) длительностью до 10 минут. Далее прогноз углового положения фотокамеры осуществляют по инерциальным данным блока 25. В блоке 26 выполняют уточнение углов ориентации блока 1  в фильтре Кальмана. После завершения переходных процессов на его выходе получают валидные измерения
в фильтре Кальмана. После завершения переходных процессов на его выходе получают валидные измерения 
При окончании названного интервала времени блок 1 совместно с блоком 6 возвращают в исходное положение для выполнения коррекции данных блока 25.
Для уменьшения массогабаритных характеристик потребляемого тока вычислитель 26 целесообразно реализовать на специализированном процессоре TMS320c6416 (см. TMS320c6416: http//focus/ti/com/docs/prod/fold-ers/print/ TMS320c6416/html), алгоритм работы которого приведен на фиг. 14.
В функции блока 4 входит совместная запись кадров видеоизображения с выхода блока 1 и соответствующих им навигационных параметров ЛПС с выхода блока 5 и данных о ориентации фотокамеры 1 с выхода блока 6. Представляет из себя буферное запоминающее устройство.
Устройство обработки и отображения информации 7 (см. фиг. 8) предназначено для определения координат объектов (решение принимается оператором, команда на исполнение которого формируется с помощью блока 8), реализации операций в соответствии с выражениями 1-13, представления результатов измерений в заданной форме. Оно содержит первый вычислитель 10, второй вычислитель 11, третий вычислитель 12, четвертый вычислитель 13, пятый вычислитель 14, шестой вычислитель 15, второе запоминающее устройство 16, генератор синхроимпульсов 17, седьмой вычислитель 18, восьмой вычислитель 19, блок коммутации 20, блок сравнения 21, третий блок управления 22, первое запоминающее устройство 23 и блок индикации 24.
Устройство обработки и отображения информации 7 работает следующим образом.
На подготовительном этапе с помощью блока управления 8 (в качестве последнего может быть использован ноутбук, работающий в соответствии с алгоритмом, представленном на фиг. 9) задаются исходные данные:
измеренные коэффициенты дисторсии объектива фотокамеры, k1, k2, k3;
пороговые значения Δβ, Δd и Δδ;
количество итераций при решении уравнения перехода от координат объекта в кадре (xr,yr)Т к вектору направления на него 
цифровая карта района измерений с граничными характеристиками рельефа местности.
В процессе работы видеоизображение с выхода блока 4 считывается блоками 7 и 8. При обнаружении заданного объекта информация о нем с выхода блока 8 поступает на первую группу информационных входов шестого вычислителя 15 в виде координат  . В функции блока 15 (см. фиг. 10) входит преобразование координат объекта в пикселях
. В функции блока 15 (см. фиг. 10) входит преобразование координат объекта в пикселях  в вектор направления на него в системе координат фотокамеры 1
в вектор направления на него в системе координат фотокамеры 1  в соответствии с выражениями 1-4.
в соответствии с выражениями 1-4.
Одновременно информация о пространственном положении ЛПС  , а также
, а также  и
и  поступает на группу информационных входов первого вычислителя 10. В его функции входит преобразование пространственных параметров ЛПС
поступает на группу информационных входов первого вычислителя 10. В его функции входит преобразование пространственных параметров ЛПС  в геоцентрическую систему координат
в геоцентрическую систему координат  в соответствии с выражением (5).
в соответствии с выражением (5).
Результаты вычислений  поступают на первую группу информационных входов второго вычислителя 11, а на вторую группу его информационных входов - значение
поступают на первую группу информационных входов второго вычислителя 11, а на вторую группу его информационных входов - значение  с группы информационных выходов блока 15. В функции вычислителя 11 входит коррекция вектора направления на j-й объект
с группы информационных выходов блока 15. В функции вычислителя 11 входит коррекция вектора направления на j-й объект  на основе измеренной блоком 6 ориентации фотокамеры 1. Последняя поступает с первой группы информационных входов устройства 7 на входы второго запоминающего устройства 16, представляющего собой буферное запоминающее устройство. С информационных выходов блока 16 значения
на основе измеренной блоком 6 ориентации фотокамеры 1. Последняя поступает с первой группы информационных входов устройства 7 на входы второго запоминающего устройства 16, представляющего собой буферное запоминающее устройство. С информационных выходов блока 16 значения  следуют на третью группу информационных входов второго вычислителя 11. Скорректированный вектор
следуют на третью группу информационных входов второго вычислителя 11. Скорректированный вектор  находят путем последовательного умножения вектора
находят путем последовательного умножения вектора  на три соответствующие углам Эйлера матрицы поворота в соответствии с (6).
на три соответствующие углам Эйлера матрицы поворота в соответствии с (6).
Скорректированное значение вектора направления на j-й объект  с информационных выходов блока 11 далее следует на первую группу информационных входов третьего вычислителя 12. В функции последнего входит определение уточненных значений азимутального угла
с информационных выходов блока 11 далее следует на первую группу информационных входов третьего вычислителя 12. В функции последнего входит определение уточненных значений азимутального угла  , угла места
, угла места  и удаления j-го объекта от ЛПС
и удаления j-го объекта от ЛПС  . Пространственные углы и
. Пространственные углы и  находят
находят  в соответствии с выражениями (7) и (8) соответственно. Расстояние
в соответствии с выражениями (7) и (8) соответственно. Расстояние  между ЛПС и j-м объектом определяют в соответствии с (9). Для обеспечения вычислений на вторую группу информационных входов блока 12 поступает значение
между ЛПС и j-м объектом определяют в соответствии с (9). Для обеспечения вычислений на вторую группу информационных входов блока 12 поступает значение  с первой группы информационных входов устройства 7. Радиус Земли известен, а его значение содержится в блоке 12. В случае невозможности определить расстояния
с первой группы информационных входов устройства 7. Радиус Земли известен, а его значение содержится в блоке 12. В случае невозможности определить расстояния  на выходе обнуления третьего вычислителя 12 формируется сигнал, который поступает на входы обнуления первого 10 и второго 11 вычислителей. В результате значения векторов
на выходе обнуления третьего вычислителя 12 формируется сигнал, который поступает на входы обнуления первого 10 и второго 11 вычислителей. В результате значения векторов  и
и  в этих блоках обнуляются, а заявляемое устройство начинает новый цикл работы.
в этих блоках обнуляются, а заявляемое устройство начинает новый цикл работы.
Для измерения  значение с
значение с  группы информационных выходов блока 11 через блок 12 поступает на группу информационных входов четвертого вычислителя 13. В его функции входит преобразование уточненного вектора направления на j-й объект, находящегося в нормальной системе координат, в истинный вектор направления
группы информационных выходов блока 11 через блок 12 поступает на группу информационных входов четвертого вычислителя 13. В его функции входит преобразование уточненного вектора направления на j-й объект, находящегося в нормальной системе координат, в истинный вектор направления  в геоцентрической системе координат. Данную операцию в блоке 13 осуществляют в соответствии с выражением (10). Для этого на вторую группу информационных входов четвертого вычислителя 13 подают значения
в геоцентрической системе координат. Данную операцию в блоке 13 осуществляют в соответствии с выражением (10). Для этого на вторую группу информационных входов четвертого вычислителя 13 подают значения  и
и  с первой группы информационных входов блока 7.
с первой группы информационных входов блока 7.
На следующем этапе работы заявляемого устройства осуществляют преобразование вектора  . Последний поступает на вторую группу информационных входов пятого 14 и пятую группу информационных входов седьмого 18 вычислителей и вторую группу информационных входов третьего блока управления 22.
. Последний поступает на вторую группу информационных входов пятого 14 и пятую группу информационных входов седьмого 18 вычислителей и вторую группу информационных входов третьего блока управления 22.
Назначение пятого вычислителя 14 состоит в определении координат точки пересечения вектора  с «круглой» Землей
с «круглой» Землей  и преобразовании геоцентрических координат j-го объекта в географические
и преобразовании геоцентрических координат j-го объекта в географические  . Первую из названных функций в блоке 14 выполняют в соответствии с выражением (11). Для этого значение
. Первую из названных функций в блоке 14 выполняют в соответствии с выражением (11). Для этого значение  , сформированное первым вычислителем 10, поступает на первую группу информационных входов пятого вычислителя 14. Кроме того, значение
, сформированное первым вычислителем 10, поступает на первую группу информационных входов пятого вычислителя 14. Кроме того, значение  , найденное блоком 12, через блок 13 поступает на вторую группу информационных входов 14. Далее осуществляют переход от геоцентрического вектора координат j-го объекта к его географическим координатам Bj и Lj в соответствии с (12). Результаты вычислений
, найденное блоком 12, через блок 13 поступает на вторую группу информационных входов 14. Далее осуществляют переход от геоцентрического вектора координат j-го объекта к его географическим координатам Bj и Lj в соответствии с (12). Результаты вычислений  с выходов блока 14 следуют на вторую группу информационных входов блока коммутации 20.
с выходов блока 14 следуют на вторую группу информационных входов блока коммутации 20.
Одновременно (с блоком 13) в блоке 18 в два этапа осуществляют определение координат j-го объекта с заданной точностью. Данную операцию выполняют совместно с блоком управления 22 и запоминающим устройством 23. На подготовительном этапе в запоминающее устройство 23 записывают цифровую карту рельефа местности района измерений. Данная операция выполняется с помощью блока 8 по второй группе информационных входов блока 7. Одновременно по этой же шине в блок управления 22 задают граничные значения матрицы высот (Ba, La) и (Bb, Lb) и количество точек разбиения J, а в блок 18 - количество шагов сканирования по вектору  на предварительном Δd и конечном Δδ этапах. В блоке 23 осуществляют упорядоченную (по заданным адресам) запись цифровой карты рельефа местности. Матрица охватывает участок земной поверхности, ограниченный координатами (Ba, La) и (Bb, Lb). Назначение блока управления 22 состоит в преобразовании части вектора
на предварительном Δd и конечном Δδ этапах. В блоке 23 осуществляют упорядоченную (по заданным адресам) запись цифровой карты рельефа местности. Матрица охватывает участок земной поверхности, ограниченный координатами (Ba, La) и (Bb, Lb). Назначение блока управления 22 состоит в преобразовании части вектора  , ограниченного точками
, ограниченного точками  и (Bj, Lj) в линейку адресов {Ai,j,δ}, соответствующих равномерно распределенным по его длине высотам {Hi,j,δ} Рельефа местности. С этой целью на первую группу информационных входов блока 22 поступают координаты ЛПС
и (Bj, Lj) в линейку адресов {Ai,j,δ}, соответствующих равномерно распределенным по его длине высотам {Hi,j,δ} Рельефа местности. С этой целью на первую группу информационных входов блока 22 поступают координаты ЛПС  . На вторую группу информационных входов блока управления 22 подают значение вектора направления на j-й объект
. На вторую группу информационных входов блока управления 22 подают значение вектора направления на j-й объект  с выходов блока 13. На третьей группе информационных входов блока управления 22 присутствует значение координат
с выходов блока 13. На третьей группе информационных входов блока управления 22 присутствует значение координат  , поступившее с выхода пятого вычислителя 14. В блоке 22 названный отрезок вектора
, поступившее с выхода пятого вычислителя 14. В блоке 22 названный отрезок вектора  преобразуют в последовательность адресов {Ai,j,δ}, которые поступают на адресные входы запоминающего устройства 23. Последние используются для формирования на его входе адресной линейки Ai,j,δ. В результате на третью группу информационных входов седьмого вычислителя 18 поступает последовательность высот {Hi,j,δ} рельефа местности, соответствующая заданному отрезку истинного вектора направления
преобразуют в последовательность адресов {Ai,j,δ}, которые поступают на адресные входы запоминающего устройства 23. Последние используются для формирования на его входе адресной линейки Ai,j,δ. В результате на третью группу информационных входов седьмого вычислителя 18 поступает последовательность высот {Hi,j,δ} рельефа местности, соответствующая заданному отрезку истинного вектора направления  Емкость последовательности высот {Hi,j,δ} определяется значением М=max{J,δ}, где J=d(H0)ij/Δd, δ=Δd/Δδ. На фиг. 11 приведен алгоритм работы блока 18 по поиску предварительного и точного (с заданной точностью) определения координат объектов
Емкость последовательности высот {Hi,j,δ} определяется значением М=max{J,δ}, где J=d(H0)ij/Δd, δ=Δd/Δδ. На фиг. 11 приведен алгоритм работы блока 18 по поиску предварительного и точного (с заданной точностью) определения координат объектов  .
.
Геоцентрические координаты j-го объекта далее поступают на информационные входы восьмого вычислителя 19. В блоке 19 выполняют преобразование геоцентрических координат в географические  в соответствии с выражением (13).
в соответствии с выражением (13).
Результаты вычислений с выхода блока 19 поступают на первую группу информационных входов коммутатора 20.
Решение о том, какие координаты пойдут на вход блока 24 (приблизительные  , полученные на «круглой» Земле или точные
, полученные на «круглой» Земле или точные  с учетом рельефа местности) принимает блок сравнения 21. На подготовительном этапе (с использованием блока 8) в блок сравнения 21 записывают значение Δβ, определяющее заданную потенциальную точность определения координат объектов. В процессе работы заявляемого устройства в блоке 21 выполняют сравнение очередного измеренного значения
с учетом рельефа местности) принимает блок сравнения 21. На подготовительном этапе (с использованием блока 8) в блок сравнения 21 записывают значение Δβ, определяющее заданную потенциальную точность определения координат объектов. В процессе работы заявляемого устройства в блоке 21 выполняют сравнение очередного измеренного значения  с пороговым значением Δβ. Если текущее значение
с пороговым значением Δβ. Если текущее значение  оказалось меньше порогового уровня Δβ, блок 21 формирует управляющий сигнал, поступающий на вход управления блока коммутации 20. В результате значение координат
оказалось меньше порогового уровня Δβ, блок 21 формирует управляющий сигнал, поступающий на вход управления блока коммутации 20. В результате значение координат  с выхода блока 14 через блок 20 поступает на группу информационных входов блока 24. В противном случае
с выхода блока 14 через блок 20 поступает на группу информационных входов блока 24. В противном случае  на вход блока 24 поступает значение
на вход блока 24 поступает значение  с выхода блока 19.
с выхода блока 19.
При возникновении ситуации, при которой отсутствует информация о рельефе местности и  блок 18 работает по алгоритму (см. фиг. 11) в соответствии с выражением (12), а на вход блока 24 поступают приблизительные координаты j-го объекта
блок 18 работает по алгоритму (см. фиг. 11) в соответствии с выражением (12), а на вход блока 24 поступают приблизительные координаты j-го объекта  с выхода блока 14. Синхронность выполнения всех операций обеспечивает генератор синхроимпульсов 17.
с выхода блока 14. Синхронность выполнения всех операций обеспечивает генератор синхроимпульсов 17.
Предлагаемое устройство предназначено для измерения координат подвижных объектов. Поэтому их уточнение за счет усреднения полученной их последовательности не предусмотрена. В результате необходимость в блоках обработки изображения 31 и усреднения 34 (фиг. 11 прототипа) отпадает. Полученные результаты измерений с группы информационных выходов блока 24 в заданной форме поступают на группу информационных выходов блока 7 (содержат внешний вид j-го объекта, его координаты и время их измерения во всемирном координированном времени UTC).
Первый 10, второй 11, третий 12, четвертый 13 и шестой 15 вычислители предназначены для определения истинного вектора направления на j-й объект  в геоцентрической системе координат, а также
в геоцентрической системе координат, а также  и
и  и удаление объекта от ЛПС
и удаление объекта от ЛПС  (см. фиг. 8). Это достигается благодаря учету ориентации фотокамеры в пространстве и определению места объекта в кадре фотокамеры 1. Каждый из вычислителей выполняет строго определенные в выражениях (1-11) операции, реализация которых сложностей не вызывает. Реализация этих блоков известна (см. пат. РФ №2513900, опубл. 20.07.2014), выполняются на постоянных запоминающих устройствах К541 и К500 сериях микросхем. Алгоритмы работы вычислителей 10, 11, 12 и 14 приведены на фиг. 18-22 прототипа, а шестого вычислителя 15 на фиг. 15.
(см. фиг. 8). Это достигается благодаря учету ориентации фотокамеры в пространстве и определению места объекта в кадре фотокамеры 1. Каждый из вычислителей выполняет строго определенные в выражениях (1-11) операции, реализация которых сложностей не вызывает. Реализация этих блоков известна (см. пат. РФ №2513900, опубл. 20.07.2014), выполняются на постоянных запоминающих устройствах К541 и К500 сериях микросхем. Алгоритмы работы вычислителей 10, 11, 12 и 14 приведены на фиг. 18-22 прототипа, а шестого вычислителя 15 на фиг. 15.
Для уменьшения массогабаритных характеристик, потребляемого тока названные блоки целесообразно реализовать на специализированном процессоре TMS320c6416 (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html).
Пятый 14, седьмой 18 и восьмой 19 вычислители реализуются аналогично соответствующим блокам в пат. РФ №2458360, опубл. 10.08.2012. Пятый вычислитель 14 предназначен для определения координат точки пересечения вектора  с «круглой» Землей
с «круглой» Землей  и преобразования геоцентрических координат
и преобразования геоцентрических координат  в географические
в географические  в соответствии с (11) и (12).
в соответствии с (11) и (12).
Реализация блока трудностей не вызывает. Может быть реализован на постоянных запоминающих устройствах К541 и К500 сериях микросхем.
Седьмой вычислитель 18 предназначен для определения местоположения объекта с заданной точностью в геоцентрической системе координат  . Данную функцию блок 18 выполняет в два этапа в соответствии с алгоритмом, приведенном на фиг. 11 и выражением (13). Может быть реализован по аналогии с соответствующим блоком (см. пат. РФ №2458360, опубл. 10.08.2012) на базе 16-ти разрядного микропроцессора К1810 ВМ86.
. Данную функцию блок 18 выполняет в два этапа в соответствии с алгоритмом, приведенном на фиг. 11 и выражением (13). Может быть реализован по аналогии с соответствующим блоком (см. пат. РФ №2458360, опубл. 10.08.2012) на базе 16-ти разрядного микропроцессора К1810 ВМ86.
Восьмой вычислитель 19 предназначен для преобразования геоцентрических координат объекта  в географические
в географические  в соответствии с выражением (12).
в соответствии с выражением (12).
Реализация блока 19 известна и трудностей не вызывает. Блок 19 может быть реализован на дискретных элементах на базе ТТЛ-уровней сигналов, например 555, 1533 сериях микросхем и др.
Третий блок управления 22 предназначен для преобразования части вектора  , ограниченной точками
, ограниченной точками  и, (Bj, Lj) в линейку адресов {Ai,j,δ}, соответствующих равномерно распределенным высотам {Hi,j,δ} рельефа местности. Реализация блока 22 известна и трудностей не вызывает. Может быть реализован на микропроцессорной сборке с достаточным быстродействием (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.), в которой реализован алгоритм, приведенный на фиг. 12. Последний определяет порядок выполнения операций по предварительному определению координат объектов. В режиме измерения координат с заданной точностью порядок работы блока 22 сохраняется (алгоритм имеет аналогичный вид).
и, (Bj, Lj) в линейку адресов {Ai,j,δ}, соответствующих равномерно распределенным высотам {Hi,j,δ} рельефа местности. Реализация блока 22 известна и трудностей не вызывает. Может быть реализован на микропроцессорной сборке с достаточным быстродействием (см. Шевкоплес Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с.), в которой реализован алгоритм, приведенный на фиг. 12. Последний определяет порядок выполнения операций по предварительному определению координат объектов. В режиме измерения координат с заданной точностью порядок работы блока 22 сохраняется (алгоритм имеет аналогичный вид).
Реализацию функций блоков 15-24 целесообразно осуществить с помощью второго сигнального процессора (см. TMS320c6416: http://focus/ti/com/docs/prod/folders/print/TMS320c6416.html).
Кроме того, блоки 7, 8 и 26 могут быть одновременно реализованы на персональном компьютере. В качестве минимальных требований к нему можно определить следующее: процессор Core i5 2000 МГц, 1 ГБ оперативной памяти, 200 МБ свободного пространства на жестком диске. Программная составляющая: операционная система Windows ХР SP2 и выше, библиотека.NetFrameWork 4.0, цифровая карта местности с информацией о рельефе и формате, совместимом с картами «Группы «Панорама».
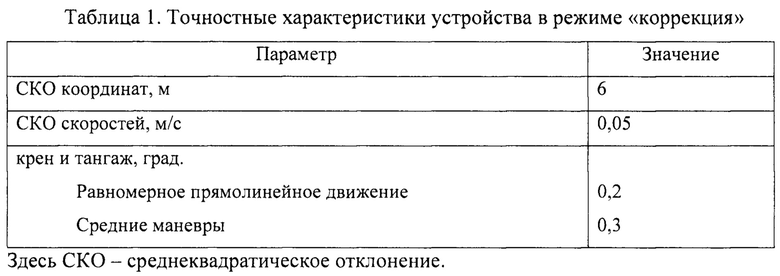
Выполнен анализ точностных и временных характеристик заявляемого устройства. При нахождении блоков 1 и 6 в исходном (фиксированном) состоянии устройство работает в интегрированном режиме блоков 5 и 6 (режим «коррекции»). В этом состоянии точностные характеристики устройства определяются блоком 5. При использовании последним антенной системы приема сигналов спутниковой навигационной системы с базой в 1 м (точность измерения курса 0,8°) точностные характеристики устройства (см. фиг. 1а) приведены в Таблице 1.
После изменения ориентации блока 1 устройство переходит в режим автономной работы (см. фиг. 1б), от блока 6 отключается блок навигации 5. Устройство осуществляет прогноз пространственной ориентации фотокамеры 1 по инерциальным данным блока 6. Заявленная производителем стабильность дрейфа блока 25 составляет 5°/час, которая реально достижима только в лабораторных стационарных условиях. Если заложить реалистичное значение стабильности дрейфов гироскопов 10°/час, тогда за 10 минут автономной работы ошибка прогноза угла составит 1,7°. Для угла места это означает ошибку 2°, для курса 2,5°. Погрешность определения географических координат объекта съемки относительно местоположения ЛПС при наклонной дальности 3000 м составит 167 м. Путем добавления погрешности определения абсолютных координат воздушного судна равной 6 м получим абсолютную погрешность определения географических координат объекта съемки 173 м.
В большинстве случаев обнаружение, фиксирование и определение объектов осуществляют не в надир, а под углом фотокамеры 1 не менее 45°. Последняя крепится на воздушное судно (ВС) с наклоном по оси крена под 45°, что позволит осуществлять полет около заданного объекта, а не над ним (во многих случаях это запрещено), а по курсу - на 90°.
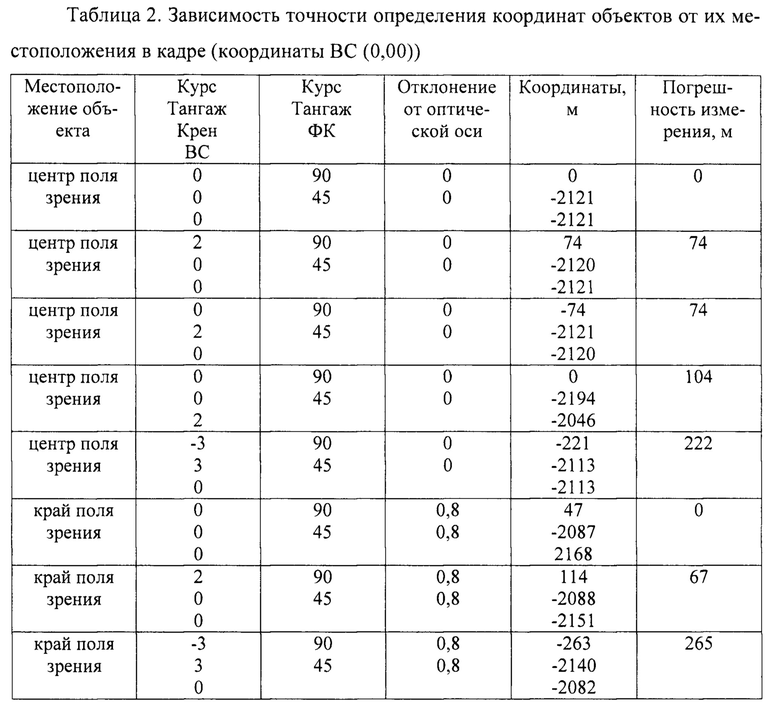
Выполнен анализ зависимости ошибки определения координат объектов, находящихся в центре кадра фотокамер (ФК) и на ее краю. Для упрощения расчетов исключаем этап пересечения луча с рельефом местности (рассматривается водная поверхность), модуль длины которого равна 3000 м. Зафиксируем углы поля зрения фотокамеры 1 относительно ЛПС. Исходя из необходимой разрешающей способности блока 1 0,025 м/писк и дальности наблюдения 3000 м были определены необходимые параметры ФК, такие как размер матрицы и фокусное расстояние объектива 400 мм, угол поля зрения 1,8×1,8 градусов. На их основе получены данные, представленные в таблице 2.
Представленные результаты свидетельствуют о том, что ошибка собственной ориентации ВС не должна превышать 2° по каждой из осей.
Выполнение оценки временных затрат на обнаружение объекта и определение его координат для обоих режимов работы устройства: «коррекции» и «с рук» (автономной работы ФК). Исходя из заданного расстояния наблюдения в 3000 м и зафиксированного угла наблюдения 45°, высота съемки должна осуществляться 3000-45°=2120 м. Размер проекции поля наблюдения на этой дальности составляет 130 м. Это приводит к тому, что оператор может обнаружить заданный объект, но последний сразу может не попасть в поле наблюдения фотокамеры. В результате требуется ВС совершить разворот, обратный полет и еще один разворот и выставить линию повторного полета (прохода) возле объекта с точностью выше 65 м. Таким образом, в случае удачного выбора повторного прохода ЛПС на получение одного измерения потребуется время, равное суммарному времени двух галсов и двух разворотов.
Для измерений в автономном режиме ФК 1 высота полета и дальность до объекта может быть уменьшена. В результате в рамках одного прохода можно выполнить более одного измерения. Выигрыш по времени от использования автономного режима использования ФК составляет в 3 раза и более.
Приложение
Порядок определения параметров фильтра Калмана для коррекции инерциальной навигационной системы на основе комплексной обработки информации от внешних датчиков
В предлагаемом устройстве определение местоположения летно-подъемного средства  и его пространственную ориентацию
и его пространственную ориентацию  с высокой точностью выполняет блок навигации 5. В свою очередь измерение пространственной ориентации блока видеонаблюдения 1 (фотокамеры) осуществляет инерциальный измерительный модуль 6 на основе инерциального датчика тактического класса 25. Малые размеры фотокамеры 1 затрудняют с достаточной точностью определять ее пространственную ориентацию. Для устранения этого недостатка устройство регулярно не реже чем через 10 минут работы переходит в режим «коррекция». В результате показания блока 25 корректируются в блоке 26 полученными с высокой точностью измерений блоком 5 на основе использования сигналов спутниковой навигационной системы (СНС).
с высокой точностью выполняет блок навигации 5. В свою очередь измерение пространственной ориентации блока видеонаблюдения 1 (фотокамеры) осуществляет инерциальный измерительный модуль 6 на основе инерциального датчика тактического класса 25. Малые размеры фотокамеры 1 затрудняют с достаточной точностью определять ее пространственную ориентацию. Для устранения этого недостатка устройство регулярно не реже чем через 10 минут работы переходит в режим «коррекция». В результате показания блока 25 корректируются в блоке 26 полученными с высокой точностью измерений блоком 5 на основе использования сигналов спутниковой навигационной системы (СНС).
Важная роль в разработке алгоритма работы фильтра Калмана (блока 26) отводится модели ошибок датчиков и уравнений, реализуемых в инерциальной навигационной системе (ИНС). В качестве варьируемых параметров исходных уравнений можно выбрать:
где VN, δVN - векторы скорости объекта и ошибки ее определения в навигационной системе координат (СК) N; RN, δRN - векторы координат объекта и ошибки их определения в навигационной СК N; ΨN - вектор ошибки определения ориентации в пространстве, выраженный в навигационной СК N; (Ψn ×) - косоугольная матрица, соответствующая вектору Ψn; δωIB - вектор ошибки определения угловой скорости, измеренной гироскопами; δaIB - вектор ошибки определения ускорения, измеренного акселерометрами.
Используя уравнения динамики объекта и предложенные ошибки в параметрах можно записать уравнения ошибок в следующем виде (см. Savage P.G. Strapdown Analytics Parts 1 and 2, Maple Plain, MN: Strapdown Associates, 2000):

Для связи параметров с географической системой координат можно воспользоваться матрицей поворота навигационной системы координат относительно географического трехгранника на угол α  :
:

Измеренные значения  и
и  с учетом основных составляющих ошибок гироскопов и акселерометров можно переписать в виде:
с учетом основных составляющих ошибок гироскопов и акселерометров можно переписать в виде:
где Δа, Δω - смещения нулей акселерометров и гироскопов соответственно, ϑa, ϑω - случайные ошибки измерений акселерометров и гироскопов.
Смещения нулей погрешности акселерометров Δа и гироскопов Δω в первом приближении можно рассматривать (см. Бабич О.А. Обработка информации в навигационных комплексах - М.: Машиностроение, 1991. - 512 с.) как автокоррелированные случайные величины с экспоненциальной корреляционной функцией
где t - текущее время,  , τμ - время корреляции,
, τμ - время корреляции,  - дисперсия ошибки, μ - индекс, относящийся к соответствующему чувствительному элементу инерциального измерительного модуля (ИИМ) (μ=ω соответствует акселерометру; μ=ω - гироскопу).
- дисперсия ошибки, μ - индекс, относящийся к соответствующему чувствительному элементу инерциального измерительного модуля (ИИМ) (μ=ω соответствует акселерометру; μ=ω - гироскопу).
Случайным ошибкам с экспоненциальной корреляционной функцией соответствует гауссовский марковский процесс первого порядка:
где σ - СКО случайных погрешностей; ϑ∈N(0,1) - гауссовский шум с нулевым средним значением и корреляционной функцией R(t, τ)=δ(t-τ), δ(⋅) - дельта-функция.
В этом случае вектор состояния, подлежащий оценке, можно представить в следующем виде с учетом основных составляющих ошибок гироскопов и акселерометров:
δХ=[(δVN)T,(Ψn)T,(δRN)T,(Δω)T,(Δа)т]т;
а уравнение ошибок примет следующий вид в непрерывном случае

или
δXk+1=FkδXk+ϑk
после дискретизации.
Естественным предположением в подобных задачах является независимость вектора шумов в разные моменты времени, т.е.
Вектор измерений zk запишем в виде
zk=HkδXk+ξk,
где Hk - измерительная матрица, ξk - случайная ошибка измерений с ковариационной матрицей Rk, т.е.
Предполагая, что коррекция проводится от СНС по координатам и скоростям, можем получить уравнение измерения:

где δzR - вектор коррекции по координатам, δzv - вектор коррекции по скорости,
Теперь можно написать традиционную структуру фильтра Калмана с начальными условиями: δХ0, Р0=Е[δХ0(δХ0)Т] (см. Savage P.G. Strapdown Analytics Parts 1 and 2, Maple Plain, MN: Strapdown Associates, 2000; Simon D. Optimal State Estimation. Kalman, Hoo and Nonlinear Approaches, John Wiley & Sons, Inc., Hoboken, New Jersey, 2006).
Прогнозируемый вектор состояния и его ошибки счисления на момент времени tk+1:
δXk+1-FkδXk,

В момент коррекции tk рассчитывается коэффициент усиления фильтра Kk:

и затем уточняется вектор состояния и его ковариационная матрица:
где  - уточненный вектор состояния δXk,
- уточненный вектор состояния δXk,  - уточненная ковариационная матрица Pk.
- уточненная ковариационная матрица Pk.
Коррекция навигационных параметров (координаты, скорость и углы) производится по формулам
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2465613C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2458360C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ ОХРАНЯЕМОГО ОБЪЕКТА | 2011 |
|
RU2469408C1 |
| Способ и устройство определения координат источников радиоизлучения | 2017 |
|
RU2659810C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| Способ и устройство определения координат источников радиоизлучения | 2018 |
|
RU2700767C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |


Изобретение относится к области радиотехники и может быть использовано для определения местоположения подвижных объектов угломерно-дальномерным способом с летно-подъемного средства (ЛПС). Технический результат – расширение границ контролируемого района и сокращение временных затрат на обнаружение и определение координат заданных объектов. В заявленном устройстве определения координат объектов элементы наземного пункта управления переносены на борт ЛПС. Использован режим автономной от ЛПС работы фотокамеры (ФК), пространственную ориентацию которой определяют с помощью инерциального измерительного модуля (ИИМ). Повышение точностных характеристик последнего достигается благодаря периодической коррекции его показаний на основе данных спутниковой навигационной системы и уточнения полученных ИИМ оценок с помощью фильтра Калмана. 1 з.п. ф-лы, 14 ил., 2 табл.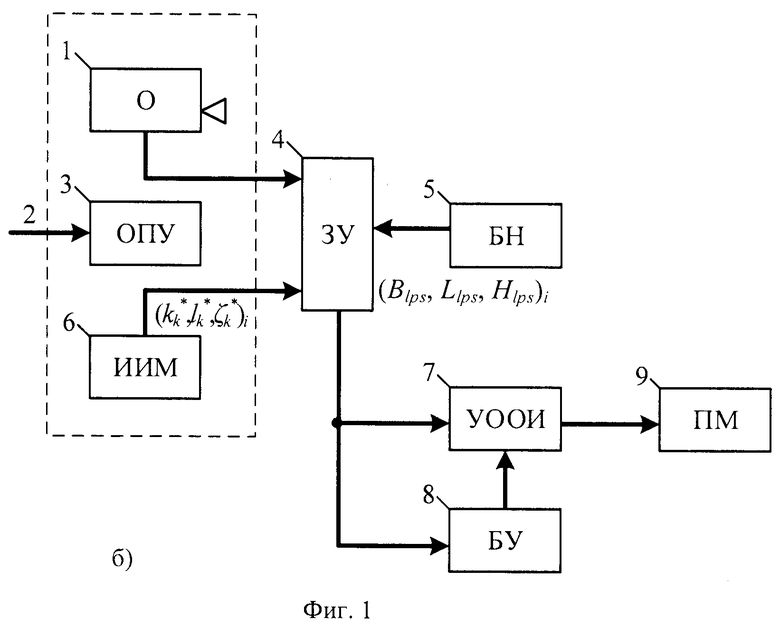
1. Устройство определения координат объектов, размещаемое на летно-подъемном средстве (ЛПС) штатной комплектации и содержащее передающий модуль, блок видеонаблюдения, последовательно соединенные блок навигации и запоминающее устройство, вторая группа информационных входов которого соединена с группой информационных выходов блока видеонаблюдения, отличающееся тем, что на ЛПС дополнительно размещают устройство обработки и отображения информации, блок управления, опорное поворотное устройство и инерциальный измерительный модуль, причем блок видеонаблюдения и инерциальный измерительный модуль размещают совместно на опорном поворотном устройстве, группа выходов управления которого является входной шиной устройства определения координат объектов, группу информационных выходов инерциального измерительного модуля соединяют с третьей группой информационных входов запоминающего устройства, группу информационных выходов которого соединяют с группой информационных входов блока управления и первой группой информационных входов устройства обработки и отображения информации, вторую группу информационных входов которого соединяют с группой информационных выходов блока управления, а группу информационных выходов соединяют с группой информационных входов передающего модуля, а на подготовительном этапе и в режиме работы устройства «коррекция» группу информационных входов инерциального измерительного модуля соединяют с группой информационных выходов блока навигации.
2. Устройство определения координат объектов по п. 1, отличающееся тем, что в качестве ЛПС используют управляемые самолеты и вертолеты различных модификаций.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2594759C1 |
| RU 2775299 C1, 29.06.2022 | |||
| СИСТЕМА НАБЛЮДЕНИЯ ЗА ЗЕМНОЙ ПОВЕРХНОСТЬЮ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2323851C1 |
| КОРРЕЛЯЦИОННО-БАЗОВАЯ СИСТЕМА ЛОКАЦИИ НЕПОДВИЖНЫХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2674265C1 |
| EA 202000255 A1, 28.02.2022 | |||
| US 2021385386 A1, 09.12.2021 | |||
| US 2021061466 A1, 04.03.2021. | |||
