Настоящее изобретение относится к рабочей машине-манипулятору, а более конкретно - к рабочей машине-манипулятору, которая способна к выполнению множества технологических операций при использовании одного или более рабочих рычагов, которые несут рабочие средства.
Рабочие машины-манипуляторы, которые способны выполнять как погрузочные технологические операции, так и земляные работы, являются хорошо известными. Типовая машина, соответствующая предшествующему уровню техники, включает в себя рабочий рычаг с погрузочной механической лопатой на переднем конце машины и рабочий рычаг с инструментом для выполнения земляных работ на заднем конце машины. В кабине оператора между передним и задним концами машины кресло оператора может поворачиваться между положением, обращенным вперед, и положением, обращенным назад, так что в каждом рабочем положении оператор может управлять органами управления, соответствующими управлению функцией погрузочного рычага или функцией рычага для выполнения земляных работ. Обычное основное направление движение таких машин, то есть направление вперед, при езде по дороге, осуществляют с размещением переднего конца спереди, а органы управления в кабине оператора для управления машиной размещены так, чтобы поддаваться управлению при обращении оператора в направлении вперед.
В соответствии с первым аспектом настоящего изобретения мы обеспечиваем рабочую машину-манипулятор, содержащую кузов и конструкцию, входящую в контактное взаимодействие с грунтом, причем кузов крепит первичный источник энергии и первый рабочий рычаг, первый рабочий рычаг является поворотным для движения вверх и вниз вокруг первой, в общем, горизонтальной оси, проходит за первый конец кузова и несет при использовании на своем внешнем конце первое рабочее средство, а кузов несет ко второму концу кузова, противоположному первому концу, надстройку, которая является поворотной относительно кузова вокруг первой, в общем, вертикальной оси, причем надстройка обеспечивает крепление второго рабочего рычага, крепление которого обеспечивает возможность второму рабочему рычагу поворачиваться вверх и вниз вокруг второй, в общем, горизонтальной оси и поворачиваться вокруг второй, в общем, вертикальной оси, и второй рабочий рычаг при использовании несет на внешнем конце второе рабочее средство, при этом надстройка крепит кабину оператора, которая обеспечивает рабочее место оператора, включающее в себя кресло оператора и органы управления, управляемые оператором при занимании кресла, и в которой кабина является поворотной вокруг третьей, в общем, вертикальной оси относительно надстройки.
Благодаря обеспечению кабины, являющейся поворотной относительно надстройки, тогда как надстройка является поворотной относительно кузова, машина, соответствующая настоящему изобретению, способна к выполнению широкого диапазона технологических операций. Могут быть реализованы различные режимы работы.
Таким образом, по сравнению с предложениями, соответствующими предшествующему уровню техники, машина, соответствующая настоящему изобретению, требует размещения органов управления в одном месте в кабине, а не множество наборов органов управления для работы оператора, и не требует вращающегося кресла, поскольку вся кабина оператора является поворотной между положениями, включающими в себя положение, обращенное к первому концу машины, и положение, обращенное ко второму концу машины. Кроме того, обычным направлением движения машины является движение со вторым концом кузова, противоположным первому концу, где обеспечено первое рабочее средство, например, погрузочная механическая лопата, находящимся впереди.
В предпочтительном варианте осуществления настоящего изобретения первым рабочим средством является погрузочная механическая лопата, а первый рабочий рычаг обеспечен парой рычажных рабочих органов, которые, по меньшей мере, когда первый рабочий рычаг поворачивается в направлении вниз, принимают между ними первичный источник энергии, который, как правило, будет размещаться ниже капота или другой конструкции кузова. Погрузочная механическая лопата желательно поворачивается вокруг третьей, в общем, горизонтальной оси относительно рабочего рычага, под управлением органов управления рабочего места оператора.
Второй рабочий рычаг может включать в себя стрелу, которая смонтирована путем крепления к надстройке на одном конце и к одному концу диппера ((прим. пер.) в этом тексте «диппер» - промежуточная деталь между стрелой и рабочим средством) на другом конце или смежно другому концу, причем диппер является поворотным относительно стрелы на первом конце диппера, вокруг четвертой, в общем, горизонтальной оси и несет на втором его конце второе рабочее средство. Вторым рабочим средством в одном примере может быть ковш для выполнения земляных работ, но в другом примере вторым рабочим средством может быть только молотковый инструмент.
Хотя если требуется, то надстройка может быть поворотной на 360 градусов относительно кузова, а кабина оператора может быть поворотной на 360 градусов относительно надстройки, но в каждом случае достигаемая степень поворота желательно составляет менее 360 градусов для упрощения передачи гидравлических и/или электрических коммуникаций, с одной стороны, между кузовом и надстройкой, а, с другой стороны, между надстройкой и кабиной оператора. Путем ограничения относительного поворота стандартные гидравлические шланги и кабели и так далее могут передавать коммуникации между относительно подвижными компонентами, тогда как для относительного поворота на все 360 градусов потребуются специальные поворотные передаточные соединения.
В любом случае машина может включать в себя коммутационную структуру для коммутации коммуникационных соединений органов управления рабочего места оператора так, чтобы кабина оператора поворачивалась относительно кузова, функции управления могли меняться местами так, чтобы подобные органы управления могли быть использованы для управления первым и вторым рабочими рычагами и соответствующими рабочими средствами в зависимости от положения кабины оператора.
Общая длина и конфигурация второго рабочего рычага такова, чтобы с кабиной, поворачиваемой в положение, в котором оператор на рабочем месте оператора обращен ко второму концу кузова, и когда надстройка повернута в положение, в котором второй рабочий рычаг может проходить к первому концу машины рядом с кабиной оператора, со вторым концом второго рычага и/или вторым рабочим средством, транспортируемым им, в контактное взаимодействие с первым рабочим средством, стрела и диппер являются относительно поворотными вокруг второй и четвертой, в общем, горизонтальных осей так, чтобы второй рабочий рычаг не проходил выше высоты кабины оператора, а более предпочтительно так, чтобы второй рабочий рычаг не проходил выше высоты оператора, сидящего на рабочем месте оператора.
Таким образом, для движения, например, при движении машины по дороге, второй рабочий рычаг может быть уложен рядом с кабиной оператора, причем его второй конец и/или второе рабочее средство сцеплено (входит в контактное взаимодействие) с первым рабочим средством.
Машина может дополнительно содержать третье рабочее средство, транспортируемое на втором конце кузова, например, отвал бульдозера или грейдера, закрепленное для поворота вверх и вниз вокруг пятой, в общем, горизонтальной оси, под управлением оператора, управляющего органами управления рабочего места оператора.
В альтернативном варианте машина может быть обеспечена на втором конце кузова стабилизаторами, которые являются опускаемыми в контактное взаимодействие с грунтом, например, при выполнении машиной земляных работ.
Первичный источник энергии может быть двигателем и может иметься трансмиссия от первичного источника энергии к ведущим колесам конструкции, входящей в контактное взаимодействие с грунтом, чтобы давать возможность машине двигаться. Главное направление движения вперед машины является движение со вторым концом кузова, находящимся впереди, но трансмиссия может давать возможность машине двигаться также в обратном направлении.
Конструкция, входящая в контактное взаимодействие с грунтом, содержит четыре колеса, которые поддаются управлению оператором, управляющим рулевым колесом на рабочем месте оператора.
Варианты осуществления настоящего изобретения теперь будут описаны со ссылкой на сопроводительные чертежи, где:
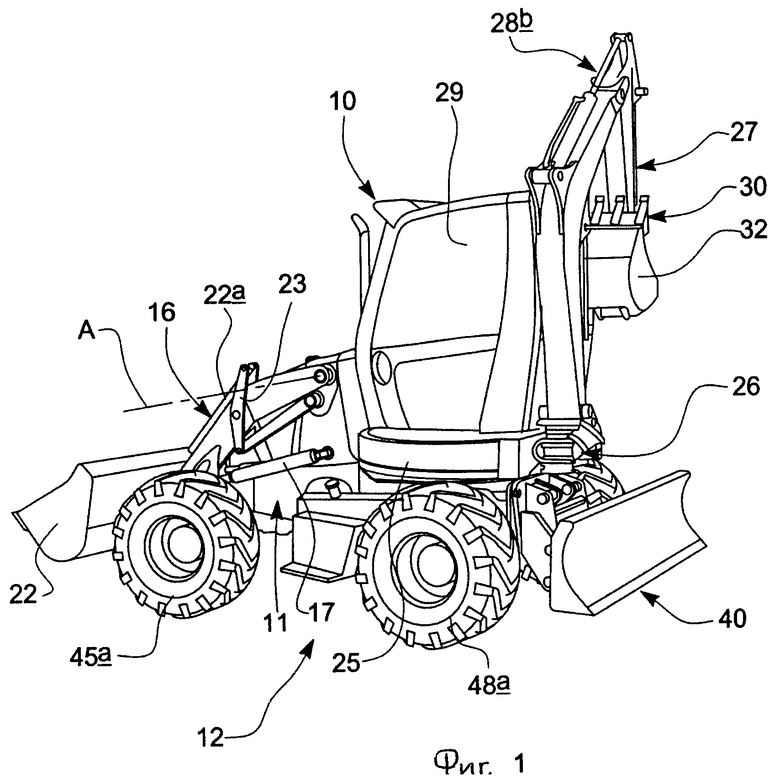
Фиг.1 - изометрическое изображение рабочей машины-манипулятора, соответствующей настоящему изобретению, со второго конца машины и сбоку;
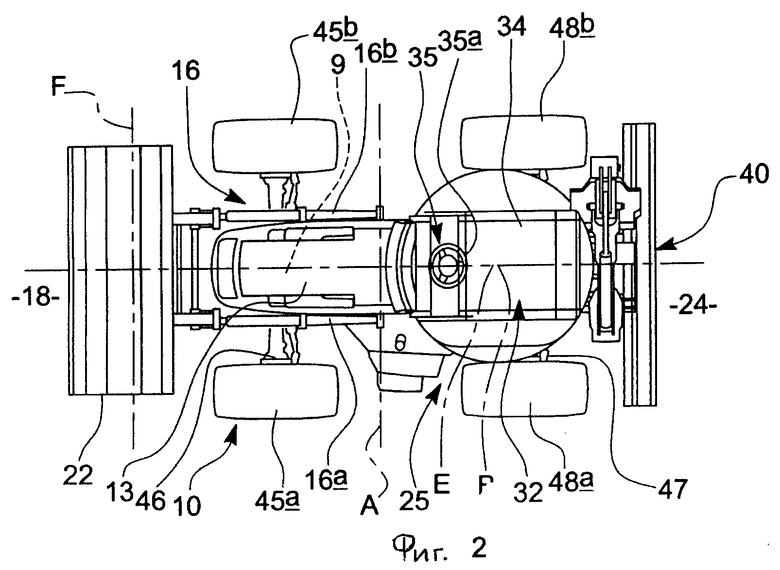
Фиг.2 - вид сверху машины, иллюстрируемой на фиг.1;
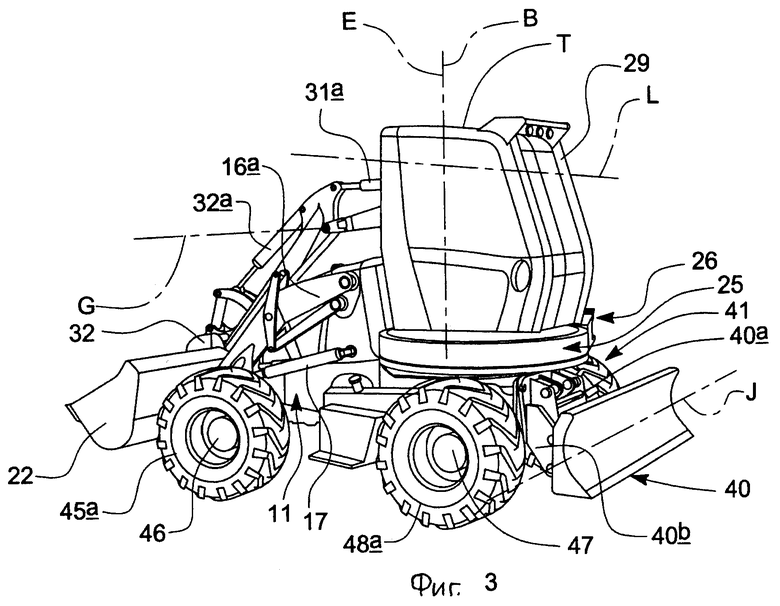
Фиг.3 - вид, аналогичный виду, приведенному на фиг.1, но иллюстрирующий машину, работающую в другом режиме работы;
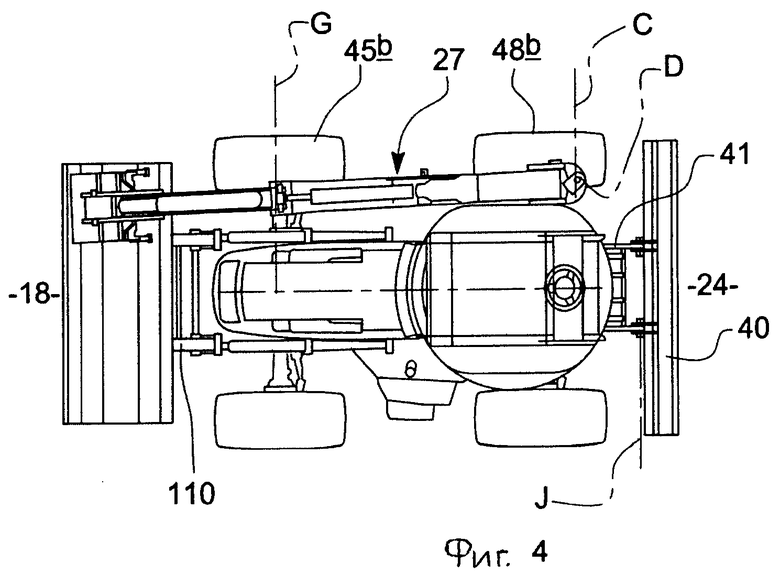
Фиг.4 - вид сверху машины в режиме работы, иллюстрируемом на фиг.3;
Фиг.5 - еще один вид, аналогичный виду, приведенному на фиг.1, но иллюстрирующий машину, работающую в еще одном другом режиме работы;
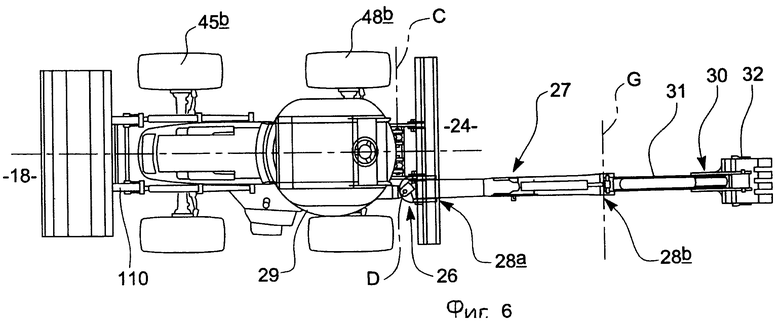
Фиг.6 - вид сверху машины в режиме работы, иллюстрируемом на фиг.5;
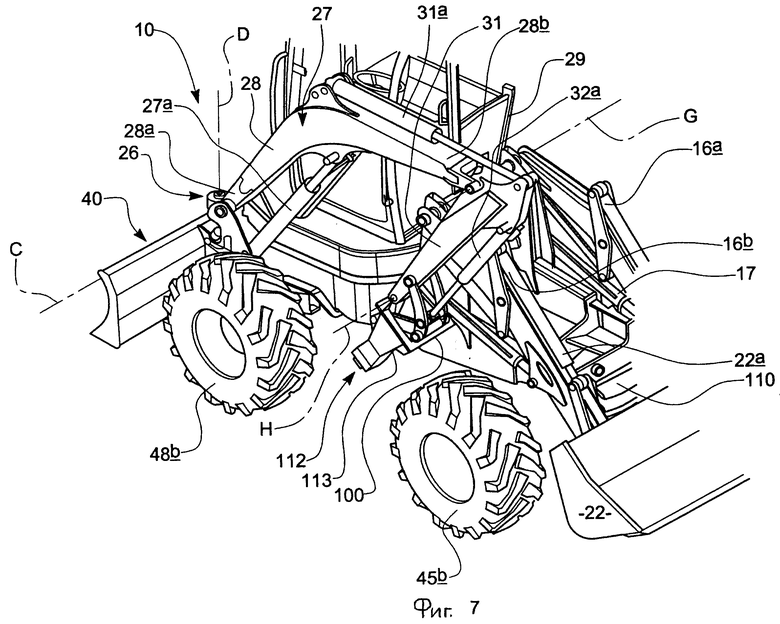
Фиг.7 - иллюстративное изометрическое изображение с первого конца и задней части детали машины, иллюстрирующие машину, выполняющую особую технологическую операцию;
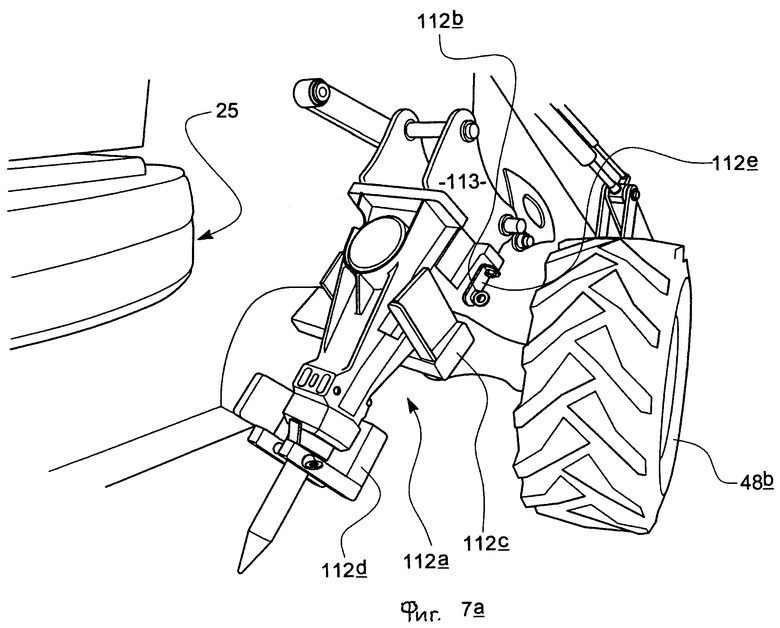
Фиг.7а - иллюстративное изометрическое изображение удерживающего устройства для удерживания устройства бурильного молотка;
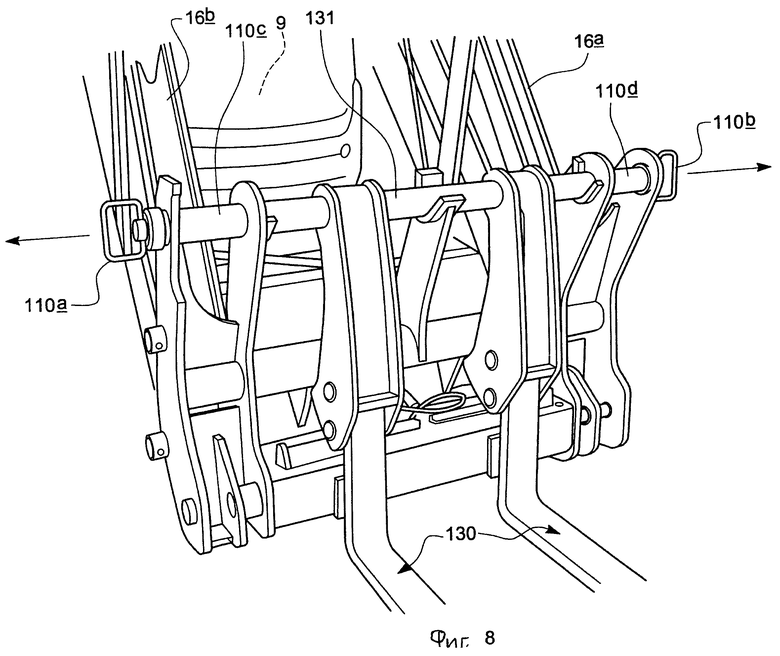
Фиг.8 - иллюстративное изображение одного конца машины, где смонтирован погрузочный вилочный захват;
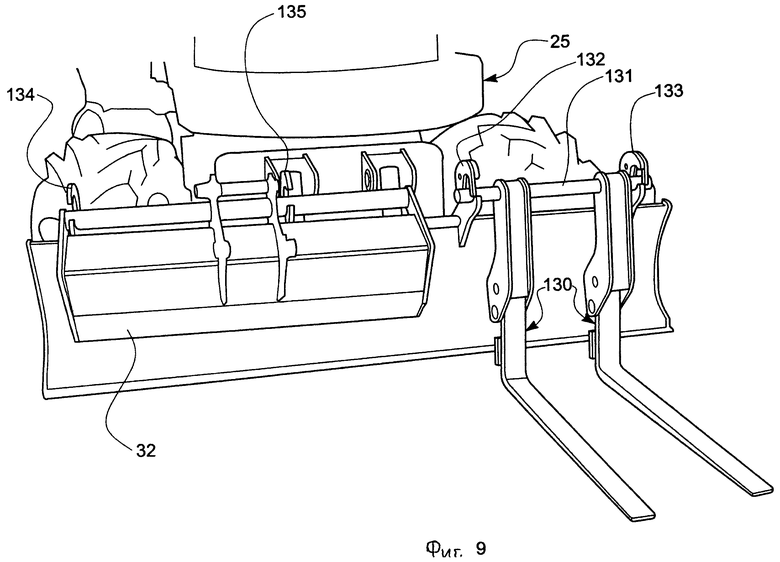
Фиг.9 - иллюстративное изображение другого конца машины, иллюстрирующее погрузочный вилочный захват и ковш для земляных работ, смонтированные на крепежной конструкции.
Со ссылкой на сопроводительные чертежи иллюстрируется рабочая машина-манипулятор 10, которая включает в себя кузов 11, который несет конструкцию 12, входящую в контактное взаимодействие с грунтом. Кузов 11 крепит первичный источник энергии, например, двигатель 9, под корпусной деталью кузова, например, капотом 13. На одном конце 18 кузова 11 предусмотрен первый рабочий рычаг 16, который в этом примере будет называться погрузочным рычагом. Погрузочный рычаг 16 является поворотным для движения вверх и вниз вокруг первой, в общем, горизонтальной оси А и включает в себя пару рычажных рабочих органов 16а, 16b, причем каждый расположен на соответствующей стороне капота 13. Рычаг может поворачиваться вверх и вниз вокруг оси А посредством пары приводов 17, каждый из которых проходит между кузовом 11 и соответствующим рычажным рабочим органом 16а, 16b погрузочного рычага 16. Как можно видеть из фиг.1, в том случае, если погрузочный рычаг 16 опущен, то капот и, следовательно, первичный источник энергии 9 вмещается между рычажными рабочими органами 16а, 16b погрузочного рычага 16.
Погрузочный рычаг 16 проходит за первый конец 18 кузова 11 и несет на его внешнем конце первое рабочее средство 22, которое в иллюстрируемом примере является погрузочной механической лопатой. Погрузочная механическая лопата 22 смонтирована на погрузочном рычаге 16 посредством крепежной конструкции 110, которая обеспечивает возможность легкого освобождения погрузочной механической лопаты 22 для цели, описываемой в этой заявке ниже. Погрузочная механическая лопата 22 поддается повороту вокруг, в общем, проходящей в горизонтальном направлении оси F механической лопаты, движение которой достигается посредством пары гидравлических линейных приводов 22а через посредство связи 23, посредством которой пространственное положение погрузочной механической лопаты 22 может сохраняться (поддерживаться), когда погрузочный рычаг поворачивается вверх и вниз вокруг первой, в общем, горизонтальной оси А.
На втором конце 24 кузова 11, противоположном первому концу 18, кузов 11 несет надстройку 25. Надстройка 25 является поворотной относительно кузова 11 вокруг первой, в общем, вертикальной оси В, и надстройка 25 также обеспечивает крепление 26 для второго рабочего рычага 27. Крепление 26 является креплением такого типа, который обеспечивает возможность поворота второго рабочего рычага 27 вверх и вниз вокруг второй, в общем, горизонтальной оси С, посредством привода 27а, который действует между надстройкой 25 и вторым рабочим рычагом 27, и поворачиваться вокруг второй, в общем, вертикальной оси D относительно надстройки 25 посредством пушпульных линейных приводов, которые нелегко увидеть на приведенных чертежах.
Второй рабочий рычаг 27 несет на его внешнем конце 30 второе рабочее средство 32, которое в представленном примере является ковшом для земляных работ, но при необходимости оно может быть бурильным молотком или другим рабочим средством.
Надстройка 25 также крепит кабину 29 оператора. В кабине 29 предусмотрено рабочее место Р оператора, которое включает в себя кресло 34 оператора и органы 35 управления, которыми действует оператор, когда занимает кресло 34 для манипулирования различными приводами 17, 22а, 27а рабочих рычагов 16 и 27, а также для побуждения надстройки 25 поворачиваться вокруг первой, в общем, вертикальной оси В относительно кузова 11.
Кабина 29 оператора смонтирована относительно надстройки 25 для поворота вокруг третьей, в общем, вертикальной оси Е, которая в представленном примере совпадает со второй, в общем, вертикальной осью В, вокруг которой надстройка 25 поворачивается относительно кузова 11, но которая в другом примере может быть смещена в продольном направлении и/или в боковом направлении машины относительно оси В. Поворот надстройки 25 относительно кузова 11 достигается посредством гидравлического двигателя, который действует между кузовом 11 и надстройкой 25; поворот кабины 29 оператора относительно надстройки 25 достигается с помощью второго гидравлического двигателя, который действует между кабиной 29 и надстройкой 25, хотя в обоих случаях, при необходимости, поворот надстройки 25 и/или кабины 29 может достигаться с помощью линейных приводов. http://love.rambler.ru/anketa.phtm?oid=68381634.
Второе рабочее средство, например, ковш 32 или бурильный молоток, смонтировано на втором рабочем рычаге 27 посредством крепежной конструкции 100, которая и в этом случае предпочтительно является крепежной конструкцией такого типа, которая разъемно крепит ковш 32 для земляных работ или другое второе рабочее средство.
Второй рабочий рычаг 27 включает в себя стрелу 28, которая смонтирована на надстройке 25 в креплении 26 на одном конце 28а стрелы 28.
На другом конце 28b стрелы 28 стрела 28 шарнирно соединена с диппером 31. Ось поворота между стрелой 28 и диппером 31 является четвертой, в общем, горизонтальной осью, указанной на чертежах буквой G. Диппер 31 может быть повернут относительно стрелы 28 посредством привода 31а диппера, который действует между стрелой 28 и диппером 31. Диппер 31 несет на втором его конце второе рабочее средство 32, а второй рабочее средство 32 является поворотным вокруг, в общем, горизонтальной оси Н относительно диппера 31 посредством гидравлического привода 32а, который действует между диппером 31 и вторым рабочим средством 32.
Машина 10 включает в себя третье рабочее средство 40, которое предусмотрено на втором конце 24 машины 10. Третье рабочее средство 40 является отвалом грейдера или бульдозера, который проходит по существу по всей ширине машины, как лучше всего видно, например, на фиг.2. Отвал 40 смонтирован на крепежной конструкции 41, которая не только обеспечивает возможность поворота отвала 40 относительно вокруг дополнительной, в общем, горизонтальной оси J относительно кузова 11 машины 10, но также отвал 40 может подниматься и опускаться благодаря работе привода 40а, который действует между кузовом 11 и отвалом 40 через посредство связи 40b. Средство 40 и крепежное средство 41 вместе обеспечивают дополнительный крепежный узел 200, как лучше всего видно на фиг.9.
Конструкция 12, входящая в контактное взаимодействие с грунтом, включает в себя первую пару колес 45а, 45b, предусмотренных на каждом конце оси 46, и в этом примере ось 46 является поворотной относительно кузова 11 через посредство, в общем, стандартного, в общем, центрального шарнирного крепления, так что ось 46 может осциллировать относительно кузова 11 в ответ на возникающие изменения в уровне грунта, когда машина 10 движется по грунту.
Конструкция, входящая в контактное взаимодействие с грунтом, дополнительно включает в себя пару колес 48а, 48b, переносимую на жесткой оси 47. В этом примере все четыре колеса 45а, 45b и 48а, 48b поддаются приведению в движение посредством трансмиссии от двигателя 9, и каждое колесо является управляемым через посредство рулевого управления оператором, находящимся на рабочем месте Р оператора, поворачивающим рулевое колесо 35а управления.
Теперь будут описаны разные режимы работы машины.
В первом режиме работы, в котором машина может выполнять погрузочные операции при использовании погрузочной механической лопаты 22, надстройку 25 поворачивают в положение, показанное на фиг.1, в котором соединение 26 обеспечивается смежно одному колесу 48 второй пары колес, так что второй рабочий рычаг 27 и второе рабочее средство 32 могут быть размещены в компактном положении, показанном на фиг.1 и фиг.2. Для достижения этого стрелой 28 и диппером 31 и вторым рабочим средством 32 будет необходимо манипулировать для подъема стрелы 28 и складывания диппера 31 и второго рабочего средства 32.
Кабина 29 оператора может быть затем повернута вокруг третьей, в общем, вертикальной оси Е для приведения обращения места Р оператора к первому концу 18 машины 10. В этом положении оператор может манипулировать органами 35 управления для управления различными приводами 17 и 22а погрузочного устройства для выполнения погрузочных операций путем поворота погрузочного рычага 16 вокруг первой горизонтальной оси А и путем поворота погрузочного ковша 22 вокруг, в общем, горизонтальной оси F.
В этом положении надстройка 25 и кабина 29 оператора будут зафиксированы в описанных положениях. В общем, третье рабочее средство 40 будет подниматься от грунта во время выполнения погрузочных операций, а поскольку надстройка 25 повернута в описанное положение, второй рабочий рычаг 27 не будет заслонять видимый объект оператору при выполнении технологических операций.
Во втором рабочем режиме, когда машина 10 конфигурирована, как показано на фиг.3 и фиг.4, надстройка 25 повернута относительно кузова 11 в показанное положение, в котором соединение 26 будет поверх противоположного колеса 48b второй пары колес. В этом положении стрелой 28 и диппером 31 можно манипулировать, а также вторым рабочим средством 32 для выбора показанного положения, в котором второе рабочее средство 32 уложено в погрузочную механическую лопату 22 на одном конце 18 машины 10.
После этого кабину 29 оператора поворачивают для приведения положения оператора в положение, обращенное ко второму концу 24 машины 10. В этом положении машиной 10 можно управлять в направлении второго конца 24 машины, находящимся впереди, которое в этом примере является обычным направлением движения вперед машины 10 на дороге.
Таким образом, второй рабочий рычаг 27 и второе рабочее средство 32 уложены у боковой поверхности кабины 29 оператора во время движения машины 10, например, по дороге, и не заслоняют вида оператору, по меньшей мере, в направлениях вперед и в большинстве видов в сторону. Можно видеть, что рычаг 27 для выполнения земляных работ конфигурирован и/или имеет такую длину, что во втором рабочем положении, показанном на фиг.3 и фиг.4, ни одной части второго рабочего рычага 27 не проходит выше крыши Т кабины 29 оператора и, кроме того, ни одной части рычага 27 для выполнения земляных работ не проходит выше линии L, проходящей непосредственно над верхом головы оператора, когда он сидит в своем кресле 34.
Обеспечение управления в этой конфигурации, имеющей поворотную ось 46 по направлению к заднему концу 18 машины 10, обеспечивает преимущества устойчивости.
Во втором рабочем положении, иллюстрируемом на фиг.3 и фиг.4, погрузочный рычаг 16 опущен, но погрузочная механическая лопата 22 достаточно отстоит от грунта, а отвал 40 поднят достаточно над грунтом, чтобы не представлять потенциального препятствия.
В третьем режиме работы, когда машина будет конфигурирована, например, как иллюстрируется на фиг.5 и фиг.6, надстройка 25 может быть повернута вокруг своей, в общем, вертикальной оси В относительно кузова 11 для приведения второго рабочего рычага 27 в любое требуемое положение в возможном диапазоне поворота, так что второй рабочий рычаг 27 может быть использован для операций выполнения земляных работ. Желательно, чтобы кабина 29 оператора поворачивалась относительно надстройки 25 для приведения кабины 29 оператора в положение, в общем, за вторым рабочим рычагом 27, когда второй рабочий рычаг 27 выполняет свои операции.
Во время выполнения земляных работ при использовании второго рабочего рычага 27, как правило, третье рабочее средство 40, то есть отвал 40 грейдера/бульдозера, будет опущено в контактное взаимодействие с грунтом, в каждом случае для улучшения устойчивости машины 10.
В течение третьего режима работы кабина 29 оператора будет, в общем, заблокирована относительно надстройки 25, так что кабина 29 и надстройка 25 будут поворачиваться вместе во время выполнения операций земляных работ.
Органы 35 управления в кабине 29 оператора могут включать в себя помимо рулевого колеса 35а ножные педали, органы управления трансмиссией и другие органы управления, необходимые для управления машиной 10 во втором режиме работы, как описано выше. Погрузочным рычагом 16 и вторым рабочим рычагом 27 можно манипулировать посредством джойстика, который может быть соединен с узлом гидравлического клапана управления через посредство рулевых гидравлических вспомогательных коммуникационных линий или электрических вспомогательных коммуникационных линий.
Если надстройка 25 и/или кабина 29 оператора поворачиваются вокруг их соответствующей оси В и Е, то будет очевидно, что требуется непрерывность вспомогательной линейной коммуникации между, с одной стороны, кабиной 29 и надстройкой 25, а, с другой стороны, между надстройкой 25 и кузовом 11.
Таким образом, требуется вспомогательная линейная коммутационная структура так, чтобы, например, если кабина 29 оператора обращена к первому концу 18 машины 10, будучи в первом режиме работы, описанном выше, то джойстик или другие органы управления 35 являются операбельными для управления гидравлическими приводами 17 и 22а, но если кабина 29 оператора обращена ко второму концу 24 машины, или, по меньшей мере, иначе, чем обращена к переднему концу 18 машины 10, то органы 35 управления являются операбельными для управления гидравлическими приводами 31а, 32а и 27а для манипулирования вторым рабочим рычагом 27 и вторым рабочим средством 32.
Будет очевидно, что во втором режиме работы, в частности, как описано выше, если вместо второго рабочего средства 32, являющегося ковшом для выполнения земляных работ, как иллюстрируется на фиг.1-6, обеспечивается довольно длинное рабочее средство на конце 30 второго рабочего рычага 27, то не может быть возможным размещение второго рабочего средства 32 в погрузочной механической лопате 22. Кроме того, если обеспечивается множество рабочих средств, которые могут для альтернативных технологических операций переноситься рычагом 27 для выполнения земляных работ с помощью разъемной крепежной конструкции 100 при движении машины 10 с рабочей площадки к рабочей площадке, то было бы необходимым отдельно транспортировать каждое из рабочих средств, которые не переносятся на конце рычага для выполнения земляных работ. Это может быть очень неэффективно.
На фиг.7 можно видеть, что машина 10 имеет удерживающее устройство 112. В этом примере удерживающее устройство 112 соединено с боковой поверхностью кузова 11 между колесами 45b и 48b с левой стороны машины 10 при рассмотрении движения в ее необычном направлении вперед вторым концом 24 кузова 11, находящимся впереди.
Удерживающее устройство 112 обеспечивает внутреннюю камеру (полость), в которую может быть вставлено рабочее средство путем манипулирования вторым рабочим рычагом 27, как показано на фиг.7.
Когда рабочее средство 32 установлено в камеру, то крепежная конструкция 100 может управляться для освобождения рабочего средства 32, а второй рабочий рычаг 27 может затем двигать крепежную конструкцию 100 из удерживающего устройства 112 либо для укладывания в погрузочную механическую лопату 22, как показано на фиг.4 или фиг.5, либо для того, чтобы второй рабочий рычаг 27 мог быть использован для ношения альтернативного второго рабочего средства 32. Таким образом, на фиг.7 второе рабочее средство показано устройством 113 бурильного молотка, а удерживающее устройство 112 соответственно конфигурировано для приема устройства 113 бурильного молотка. При освобождении крепежной конструкцией 100 устройства 113 бурильного молотка крепежная конструкция может затем сцепляться с альтернативным рабочим средством, например, уже описанным ковшом 32 для выполнения земляных работ.
Форма и конфигурация удерживающего устройства 112 будет, безусловно, зависеть от характера второго рабочего средства для удерживания в соответствии с этим. Например, если удерживающее устройство 112 предназначено для удерживания рабочего средства, которое является ковшом 32 для выполнения земляных работ, то удерживающее устройство 112 может включать в себя образования для сцепления внутри и/или вне ковша 32 для выполнения земляных работ, как требуется.
На фиг.7а иллюстрируется альтернативное удерживающее устройство 112а для устройства 113 бурильного молотка, предусмотренное с двумя деталями 112с, 112d держателя, которые поддерживают устройство 113, и стопорным устройством 112е, которое включает в себя стопорный штифт 112b для фиксации устройства 113 в удерживающем устройстве 112а.
На кузове 11, безусловно, может быть предусмотрено любое число удерживающих устройств 112/112а, для которых имеется место, например, за или перед отвалом 40 бульдозера или где-либо еще на машине 10, и, таким образом, машиной 10 может транспортироваться множество рабочих средств 32, либо удерживаемых посредством удерживающего устройства (удерживающих устройств) 112/112а, либо переносимых на внешнем конце 30 второго рабочего рычага 27.
Крепежная конструкция 100 может быть вручную управляемой конструкцией, хотя предпочтительно является гидравлически управляемой посредством гидравлического привода, втягивающего и/или освобождающего фиксатор. Хорошо известна конструкция так называемых «быстрых соединителей».
На месте погрузочной механической лопаты 22 крепежная конструкция 110 на конце погрузочного рычага 16 может вместо этого нести альтернативное первое рабочее средство 22, например, погрузочный вилочный захват. Такой вилочный захват может крепиться посредством крепежной конструкции 110 так, чтобы поддаваться поворачиванию вокруг, в общем, горизонтальной оси для подъема и контактного взаимодействия с грузами, например, грузовыми поддонами.
Погрузочный вилочный захват включает в себя пару элементов 130а и 130b вилочного захвата, которые могут содержать интегральные L-образные компоненты, которые крепятся посредством крепежного рабочего органа на верхних концах элементов вилочного захвата. Крепежная конструкция 110 может включать в себя множество углублений, которые, по меньшей мере, когда погрузочная механическая лопата 22 отсоединена от крепежной конструкции 110, могут принимать крепежный рабочий орган погрузочного рабочего средства в виде вилочного захвата. Таким образом, погрузочный рычаг 16 может быть использован для погрузочных операций при использовании погрузочного вилочного захвата вместо погрузочной механической лопаты 22, как было описано ранее.
В другом примере крепежная конструкция 110 может быть способной к одновременному креплению погрузочной механической лопаты 22 и погрузочного вилочного захвата, причем элементы вилочного захвата являются подвижными между сложенным положением, по существу за погрузочной механической лопатой 22, и рабочим положением перед погрузочной механической лопатой 22. В альтернативном варианте уложенный погрузочный вилочный захват может быть используемым только после того, как отсоединена погрузочная механическая лопата 22 от крепежной конструкции 110.
На фиг.8 пара элементов погрузочного вилочного захвата 130 показана закрепленной на крепежной конструкции 110, от которой была отсоединена погрузочная механическая лопата 22. Отдельные элементы 130а, 130b погрузочного вилочного захвата 130 показаны откинутыми вперед из нерабочего положения за механической лопатой 22 в рабочее положение, как показано. Вилочный захват 130 предусмотрен на крепежном рабочем органе 131, который поддается отделению от остальной крепежной конструкции 110. Это достигается путем удаления пары фиксаторных стопорных штифтов 110а, 110b, путем движения в продольном направлении, указанном соответствующими стрелками. Штифты 110а, 110b проходят внутрь крепежного рабочего органа 131, а когда штифты 110а, 110 удалены, то крепежный рабочий орган 131 освобождается.
Крепежная конструкция 110 включает в себя пару приемных образований 110с и 110f и центральную опору 110g для поддержания крепежного рабочего органа 131, когда фиксаторы 110а, 110b освобождены.
Когда крепежный рабочий орган 131 и вилочный захват 130 удалены, остальная крепежная конструкция 110 может опять быть использована для крепления механической лопаты 22, так как опорные детали 110с, 110d механической лопаты, через которые штифты 110а, 110b иначе проходят в крепежном рабочем органе 121, останутся для приема крепежных образований механической лопаты 22.
Крепежная конструкция 41 третьего рабочего средства, то есть отвала 40 бульдозера/грейдера, также может обеспечивать углубления 132, 133 (смотри фиг.9), способные к приему крепежного рабочего органа 131 для рабочего средства погрузочного вилочного захвата 130. Такие углубления 132, 133 предпочтительно предусмотрены на отвале 40 посредством дополнительной крепежной конструкции 41 в таком положении, чтобы погрузочный вилочный захват 130 мог одновременно переноситься дополнительной крепежной конструкцией 41 так, чтобы было не обязательно удалять отвал 40 грейдера/бульдозера перед установкой погрузочного вилочного захвата 130.
Второй рабочий рычаг 27, то есть крепежная конструкция 100, и/или второе рабочее средство, переносимое на внешнем конце 30 второго рабочего рычага 27, желательно поддаются манипулированию оператором для отсоединения погрузочного вилочного захвата 130 от крепежной конструкции 110 на одном конце 18 машины 10 и для транспортировки погрузочного вилочного захвата 130 на крепежной конструкции 131 ко второму концу 24 машины 10, где они могут быть приняты отвалом 40 и/или дополнительной крепежной конструкцией 41 третьего рабочего средства 40. Такое манипулирование может предусматривать относительный поворот крепежной конструкции 110, которая может крепить или может не крепить второе рабочее средство 32, диппер 31 и стрелу 28, движение второго рабочего рычага 27 вокруг его крепления 26 и вокруг, как, в общем, горизонтальной оси С, так и, в общем, вертикальной оси D, а также необходимый поворот надстройки 25. Однако это дает возможность обеспечения одного погрузочного переднего рабочего средства, то есть вилочного захвата, который поддается использованию как на первом конце 18, так и на втором конце 24 кузова 11, и не требуется обслуживания или требуется минимальное перемещение погрузочного вилочного захвата для транспортировки его из первого конца 18 кузова 11 ко второму концу 24 кузова 11.
Очевидно, что с погрузочным вилочным захватом 130, закрепленным с помощью отвала 40 и/или дополнительной крепежной конструкции 41 третьего рабочего средства 40, машина 10 может работать в первом режиме, описанном выше, используя погрузочный вилочный захват или дополнительную механическую лопату 22, переносимую на внешнем конце погрузочного рычага 16, и машина 10 может работать также во втором и третьем рабочих режимах тоже.
Машина 10, соответствующая настоящему изобретению, особенно полезна для работ, предусматривающих укладку дорожного покрытия, когда погрузочный вилочный захват 130 может приниматься дополнительной крепежной конструкцией 41 третьего рабочего средства 40, а вторым рабочим рычагом 27 можно манипулировать для транспортировки песка и подобного материала, уложенного и удерживаемого в погрузочной механической лопате 22, ко второму концу 24 машины 10. В этом случае было установлено, что машина 10 может быть использована для рабочих функций, предусматривающих укладку дорожного покрытия без необходимости частого изменения положения машины для доставки соответствующих рабочих средств 22, 32, 40 в местоположения, смежные положению, где выполняются технологические операции.
Без отклонения от объема настоящего изобретения возможны различные модификации.
Как описано в одном примере, погрузочный рычаг 16 включает в себя пару разнесенных рычажных рабочих органов 16а, 16b, но в другом примере погрузочный рычаг 16 может быть обеспечен одним погрузочным рычажным рабочим органом, который может быть установлен, например, на одной стороне капота 13 или другой части корпуса кузова и первичного источника энергии 9.
В описанном примере первичный источник энергии 9 является двигателем, но в другом примере может быть альтернативный вид первичного источника энергии, например, электродвигатель.
Особая описанная конфигурация погрузочного рычага 16 является только характерной, так как является конкретной конфигурацией второго рабочего рычага 27. В другом примере вместо или помимо отвала 40 грейдера/бульдозера машина 10 может быть предусмотрена со стабилизаторами для использования во время операций осуществления земляных работ при использовании второго рабочего рычага 27 и второго рабочего средства 32.
Стрела 28 второго рабочего рычага 27 не обязательно должна иметь показанную форму «банана», хотя это полезно для гарантии того, чтобы общая длина второго рабочего рычага 27 и его конфигурация не заслоняла линии поля зрения оператора, по меньшей мере, когда машина находится в ее второй рабочей конфигурации, описанной выше.
В другом примере машина 10 может быть управляемой только двумя колесами. Оси 46, 47 могут быть при необходимости подвешены из кузова 11.
В иллюстрируемом примере колеса 45 и 48 являются небольшими с тем, чтобы обеспечивать максимальную устойчивость во время, например, операций выполнения земляных работ, но могут быть больше.
При необходимости машина 10 может включать в себя датчики для индикации, если машина становится неустойчивой в боковом направлении, например, когда вторым рабочим рычагом 27 выполняют операции земляных работ на каждой стороне машины 10.
В описанном примере надстройка 25 не способна поворачиваться относительно кузова 11 на все 360 градусов, а поворот ограничен приблизительно 270 градусами. Таким образом, нет необходимости в обеспечении поворотных муфт для обеспечения непрерывности гидравлических и/или электрических коммуникаций между надстройкой 25 и кузовом 11, но гидравлические соединения могут быть получены посредством шлангов, электрические соединения - посредством кабелей. Аналогичным образом, кабина 29 оператора предпочтительно не поддается повороту относительно надстройки 25 на 360 градусов, а поддается повороту только на приблизительно 180 градусов, но и в этом случае возможен поворот на 270 градусов для облегчения удобства коммуникаций между надстройкой 25 и кабиной 29 оператора без использования дорогих муфт поворотного типа.
В этом примере третье рабочее средство, то есть отвал 40 бульдозера, и/или дополнительная крепежная конструкция 41 могут предусматривать дополнительные углубления 134, 135 для установки и удерживания второго рабочего средства, например, где это ковш для осуществления земляных работ, как показано на фиг.8, рядом с вилочным захватом 130, где его крепят на конце 24 машины 10.
Таким образом, когда рычаг 27 для выполнения земляных работ транспортирует, например, устройство 113 бурильного молотка, ковш 32 для выполнения земляных работ может быть уложен и транспортироваться на втором конце 24 машины 10 на дополнительном крепежном узле 200 третьего рабочего средства 30 и крепежной конструкции 41.
Дополнительные углубления 134, 135 дополнительного крепежного узла могут иметь фиксаторы для блокирования крепежного рабочего органа 131 относительно дополнительного крепежного узла 200.
Ковш 32 для выполнения земляных работ может двигаться в его уложенном положении, как показано на фиг.8, путем манипулирования рычагом 27 для выполнения земляных работ.
Элементы, описанные в описании, приведенном выше, или в формуле изобретения, или в сопроводительных чертежах, выраженные в их специфических формах или в терминах, для выполнения описанной функции, или способа или процесса достижения описанного результата, соответственно, могут отдельно или в любой комбинации таких элементов быть использованы для реализации настоящего изобретения в его разных формах.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧАЯ МАШИНА-МАНИПУЛЯТОР И СПОСОБ ФУНКЦИОНИРОВАНИЯ РАБОЧЕЙ МАШИНЫ-МАНИПУЛЯТОРА | 2008 |
|
RU2475598C2 |
| РАБОЧАЯ МАШИНА-МАНИПУЛЯТОР И СПОСОБ ФУНКЦИОНИРОВАНИЯ РАБОЧЕЙ МАШИНЫ-МАНИПУЛЯТОРА | 2008 |
|
RU2466240C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАБОЧЕЙ МАШИНЫ | 2010 |
|
RU2517141C2 |
| РАБОЧАЯ МАШИНА | 2011 |
|
RU2516673C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО УСТРОЙСТВА | 2003 |
|
RU2309116C2 |
| РАБОЧАЯ МАШИНА | 2008 |
|
RU2478559C2 |
| РАБОЧАЯ МАШИНА | 2011 |
|
RU2517143C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| УПРАВЛЕНИЕ ПОГРУЗОЧНО-РАЗГРУЗОЧНОЙ МАШИНОЙ | 2018 |
|
RU2756412C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО ТРАНСПОРТНОГО СРЕДСТВА ПОД ТРЕБУЕМЫМ УГЛОМ (ВАРИАНТЫ) | 2015 |
|
RU2684818C2 |

Изобретение относится к рабочей машине-манипулятору, которая выполняет множество технологических операций при использовании одного или более рабочих рычагов, которые несут рабочие средства. Рабочая машина-манипулятор содержит кузов (11) и конструкцию (12), входящую в контактное взаимодействие с грунтом, причем кузов (11) крепит первичный источник (9) энергии и первый рабочий рычаг (16), первый рабочий рычаг (16) является поворотным для движения вверх и вниз вокруг первой, в общем, горизонтальной оси (А), проходит за первый конец (18) кузова (11) и несет при использовании на своем внешнем конце первое рабочее средство (22), а кузов (11) несет ко второму концу (24) кузова (11), противоположному первому концу (18), надстройку (25), которая является поворотной относительно кузова (11) вокруг первой, в общем, вертикальной оси (В), причем надстройка (25) обеспечивает крепление (26) для второго рабочего рычага (27), крепление (26) которого обеспечивает возможность второму рабочему рычагу (27) поворачиваться вверх и вниз вокруг второй, в общем, горизонтальной оси (С) и поворачиваться вокруг второй, в общем, вертикальной оси (D), и второй рабочий рычаг (27) при использовании несет на внешнем конце (30) второе рабочее средство (32), при этом надстройка (25) крепит кабину (29) оператора, которая обеспечивает рабочее место (Р) оператора, включающее в себя кресло (34) оператора и органы (35) управления, управляемые оператором, размещающимся в кресле (34), и в которой кабина (29) является поворотной вокруг третьей, в общем, вертикальной оси (Е) относительно надстройки (25), при этом машина содержит коммутационную конструкцию для коммутации коммуникационных соединений органов (35) управления рабочего места (Р) оператора так, чтобы при повороте кабины (29) оператора относительно кузова (11) функции управления менялись местами так, чтобы подобные органы (35) управления были пригодны для управления первым и вторым рабочими рычагами (16, 27) и соответствующими рабочими средствами (22, 32) в зависимости от положения обращения кабины (29) оператора. Расширяются технологические возможности и повышается функциональность машины. 14 з.п. ф-лы, 9 ил.
1. Рабочая машина-манипулятор, содержащая кузов (11) и конструкцию (12), входящую в контактное взаимодействие с грунтом, причем кузов (11) крепит первичный источник (9) энергии и первый рабочий рычаг (16), первый рабочий рычаг (16) является поворотным для движения вверх и вниз вокруг первой, в общем, горизонтальной оси (А), проходит за первый конец (18) кузова (11) и несет при использовании на своем внешнем конце первое рабочее средство (22), а кузов (11) несет ко второму концу (24) кузова (11), противоположному первому концу (18), надстройку (25), которая является поворотной относительно кузова (11) вокруг первой, в общем, вертикальной оси (В), причем надстройка (25) обеспечивает крепление (26) для второго рабочего рычага (27), крепление (26) которого обеспечивает возможность второму рабочему рычагу (27) поворачиваться вверх и вниз вокруг второй, в общем, горизонтальной оси (С) и поворачиваться вокруг второй, в общем, вертикальной оси (D), и второй рабочий рычаг (27) при использовании несет на внешнем конце (30) второе рабочее средство (32), при этом надстройка (25) крепит кабину (29) оператора, которая обеспечивает рабочее место (Р) оператора, включающее в себя кресло (34) оператора и органы (35) управления, управляемые оператором, размещающимся в кресле (34), и в которой кабина (29) является поворотной вокруг третьей, в общем, вертикальной оси (Е) относительно надстройки (25), при этом машина содержит коммутационную конструкцию для коммутации коммуникационных соединений органов (35) управления рабочего места (Р) оператора так, чтобы при повороте кабины (29) оператора относительно кузова (11) функции управления менялись местами так, чтобы подобные органы (35) управления были пригодны для управления первым и вторым рабочими рычагами (16, 27) и соответствующими рабочими средствами (22, 32), в зависимости от положения обращения кабины (29) оператора.
2. Машина по п.1, отличающаяся тем, что кабина (29) оператора является поворотной относительно надстройки (25) до положения, в котором оператор, находящийся на рабочем месте (Р) оператора, обращен к первому концу (18) машины (10), причем органы (35) управления, находящиеся на рабочем месте оператора, поддаются управлению для выполнения технологических операций при использовании первого рабочего средства (22).
3. Машина по п.2, отличающаяся тем, что при повороте кабины (29) оператора относительно надстройки (25) в положение, в котором оператор на рабочем месте (Р) оператора обращен к первому концу (18) машины (10), второй рабочий рычаг (27) поддается укладыванию на втором конце (24) кузова (11) путем поворота надстройки (25) относительно кузова (11) для приведения крепления (26) в положение на втором конце (24) машины (10).
4. Машина по п.1, отличающаяся тем, что кабина (29) является поворотной относительно надстройки (25) в положение, в котором оператор на рабочем месте (Р) оператора обращен ко второму концу (24) кузова (11), причем в этом положении оператор может управлять органами (35) управления для управления машиной (10) в направлении движения.
5. Машина по п.1, отличающаяся тем, что надстройка (25) является поворотной относительно кузова (11) так, чтобы крепление (26) для второго рабочего рычага (27) находилось между первым и вторым концами (18, 24) машины (10), тогда как кабина (29) оператора является поворотной относительно надстройки (25) так, чтобы второй рабочий рычаг (27) находился, в общем, перед рабочим местом (Р) оператора, в котором органы (35) управления поддаются управлению для выполнения технологических операций при использовании второго рабочего средства (32).
6. Машина по п.1, отличающаяся тем, что первое рабочее средство (22) является погрузочной механической лопатой, первый рабочий рычаг (16) обеспечен парой рычажных рабочих органов (16а, 16b), которые, по меньшей мере, при повороте первого рабочего рычага (16) вниз принимают между ними первичный источник (9) энергии, причем первичный источник (9) энергии размещен под конструкцией кузова, и в которой погрузочная механическая лопата (22) поворачивается вокруг третьей, в общем, горизонтальной оси (F) относительно первого рабочего рычага (16) под управлением органов (35) управления рабочего места (Р) оператора.
7. Машина по п.1, отличающаяся тем, что второй рабочий рычаг (27) включает в себя стрелу (28), которая прикреплена посредством крепления (26) к надстройке (25) на одном конце и к одному концу диппера (31) на другом конце или смежно другому концу, причем диппер (31) является поворотным относительно стрелы (28) на первом конце диппера (31) вокруг четвертой, в общем, горизонтальной оси (G) и несет на втором своем конце второе рабочее средство (32).
8. Машина по п.7, отличающаяся тем, что второе рабочее средство является ковшом (32) для выполнения земляных работ или молотковым инструментом (113).
9. Машина по п.1, отличающаяся тем, что надстройка (25) является поворотной менее чем на 360° относительно кузова (11).
10. Машина по п.1, отличающаяся тем, что кабина (29) оператора является поворотной менее чем на 360° относительно надстройки (25).
11. Машина по п.1, отличающаяся тем, что общая длина и конфигурация второго рабочего рычага (27) таковы, что при повороте кабины (29) к положению, в котором оператор на рабочем месте (Р) оператора обращен ко второму концу (24) кузова (11), и при повороте надстройки (25) к положению, в котором второй рабочий рычаг (27) проходит по направлению к первому концу (18) машины (10) рядом с кабиной (29) оператора со вторым концом (30) второго рабочего рычага (27) и/или вторым рабочим средством (32), транспортируемым на нем, в контактное взаимодействие с первым рабочим средством (22), стрела (28) и диппер (31) являются относительно поворотными вокруг второй (С) и четвертой (G), в общем, горизонтальных осей так, чтобы второй рабочий рычаг (27) не проходил выше высоты кабины (29) оператора, а предпочтительно не проходил выше высоты (L) оператора, сидящего на рабочем месте (Р) оператора.
12. Машина по п.1, отличающаяся тем, что содержит третье рабочее средство (40) транспортируемое на втором конце (24) кузова (11), являющееся отвалом, закрепленным для поворота вверх и вниз вокруг пятой (J), в общем, горизонтальной оси, под управлением оператора, управляющего органами (35) управления рабочего места (Р) оператора.
13. Машина по п.1, отличающаяся тем, что первичным источником энергии является двигатель (9), причем имеется трансмиссия от первичного источника (9) энергии к ведущим колесам (45а, 45b; 48a, 48b) конструкции, входящей в контактное взаимодействие с грунтом для обеспечения возможности машине (10) двигаться.
14. Машина по п.1, отличающаяся тем, что главным направлением вперед движения машины (10) является движение со вторым концом (24) кузова (11), находящимся впереди.
15. Машина по п.1, отличающаяся тем, что конструкция, входящая в контактное взаимодействие с грунтом, включает в себя четыре колеса (45а, 45b; 48a, 48b), которые являются управляемыми оператором, управляющим органом (35) управления в виде рулевого колеса рабочего места (Р) оператора.
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1994 |
|
RU2085662C1 |
| Экскаватор | 1984 |
|
SU1209780A1 |
| НАВЕСНОЙ ТРАКТОРНЫЙ АГРЕГАТ | 1991 |
|
RU2032303C1 |
| 0 |
|
SU153696A1 | |
| Одноковшовый экскаватор | 1987 |
|
SU1441028A1 |
| УНИВЕРСАЛЬНЫЙ ТРАКТОР | 1992 |
|
RU2045465C1 |
| Гидравлическое рулевое управление следящего типа | 1974 |
|
SU467016A1 |
| МАШИНА ДЛЯ ЭКСКАВАЦИИ И ПЕРЕМЕЩЕНИЯ ГРУНТА | 1992 |
|
RU2038446C1 |
| УНИВЕРСАЛЬНАЯ МАШИНА ГИДРОМЕХАНИЗАЦИИ | 2003 |
|
RU2237134C1 |
| US 4825567 A, 02.05.1989 | |||
| US 6056502 A, 02.05.2000 | |||
| US 6446367 A, 10.09.2002. | |||

