Область техники
Настоящее изобретение относится к способу управления транспортным средством, в частности, рабочим транспортным средством.
Уровень техники
Известное рабочее транспортное средство, например, погрузчик с обратной лопатой, содержит погрузочно-разгрузочное устройство, в частности, загрузочный ковш, установленный на передней части машины, и еще одно погрузочно-разгрузочное устройство, в частности, обратную лопату, установленную на задней части машины.
Если оператор намерен использовать загрузочный ковш, то сиденье оператора располагают по направлению движения, при этом оператор может использовать органы управления, в частности, рулевое колесо, педаль тормоза, педаль сцепления, педаль управления подачей топлива, коробку передач, имеющую передние и задние передачи, для перемещения транспортного средства по грунту. Органы ручного управления можно также использовать для подъема и опускания загрузочного рычага, а также для наполнения или опорожнения загрузочного ковша. Описанным образом осуществляют манипуляции с материалами.
В случае, когда необходимо переместить погрузчик с обратной лопатой с одного места на другое, как правило, по дорогам общественного пользования, загрузочный ковш поднимают над уровнем грунта, после чего оператор может привести в движение указанный погрузчик с обратной лопатой и управлять им наподобие автомобиля, глядя в направлении движения и используя рулевое колесо, тормоз, сцепление и органы управления дроссельной заслонкой.
При использовании обратной лопаты сиденье оператора можно вращать с тем, чтобы ориентировать его назад. Во время использования обратной лопаты транспортное средство неподвижно, при этом некоторые из колес или даже все колеса можно приподнять над грунтом путем выдвижения стабилизирующих ножек и/или опускания прямой лопаты до вхождения в контакт с грунтом. В известных погрузчиках с обратной лопатой предусмотрен один стабилизатор на правой задней стороне машины и дополнительный стабилизатор на левой задней стороне машины. Каждым стабилизатором управляют индивидуально посредством отдельного устройства ввода данных оператором, то есть, предусмотрено одно устройство ввода данных оператором для управления только правым стабилизатором и дополнительное устройство ввода данных оператором для управления только левым стабилизатором. Перед использованием обратной лопаты каждый стабилизатор устанавливают на грунт. Как правило, целесообразно, чтобы задний правый и задний левый стабилизаторы обеспечивали незначительный подъем шасси транспортного средства таким образом, чтобы вес транспортного средства принимали на себя указанные стабилизаторы, освобождая, тем самым, от нагрузки колеса, в частности, пневматические шины колес. Перенос веса транспортного средства на стабилизаторы и разгрузка шин означает, что во время работы указанное транспортное средство не будет качаться на пневматических шинах. Кроме того, поскольку каждый стабилизатор имеет индивидуальное управление, можно ориентировать транспортное средство под требуемым углом крена. Установка транспортного средства под требуемым углом крена является важной операцией, поскольку угол крена задает по существу вертикальную ось поворота, вокруг которой поворачивается обратная лопата. Как правило, оператор устанавливает на грунт оба стабилизатора, а затем регулирует их до тех пор, пока не будет получен требуемый угол крена и стабилизаторы не примут на себя достаточную часть веса транспортного средства.
Очевидно, что окончательная регулировка каждого стабилизатора в отдельности занимает много времени и приводит к задержке в использовании обратной лопаты.
Раскрытие изобретения
Задача настоящего изобретения заключается в том, чтобы предложить усовершенствованное транспортное средство.
Таким образом, согласно первому аспекту в настоящем изобретении предложен способ автоматической ориентации погрузочно-разгрузочного транспортного средства под требуемым углом, причем согласно указанному способу: в указанном транспортном средстве предусматривают транспортировочное устройство, входящее в контакт с грунтом и функционально соединенное с шасси транспортного средства, с правой стороны транспортного средства предусматривают первый стабилизатор, причем указанный первый стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема правой стороны шасси, с левой стороны транспортного средства предусматривают второй стабилизатор, причем указанный второй стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема левой стороны шасси, предусматривают контроллер для управления функционированием первого и второго стабилизаторов в ответ на введенные оператором данные, причем указанный способ содержит следующие этапы: устанавливают транспортное средство на грунт так, что первый и второй стабилизаторы не введены в контакт с грунтом, причем шасси имеет начальный угол крена, обеспечивают требуемый угол крена, подают на контроллер введенные оператором данные, требующие развертывания стабилизаторов, причем контроллер одновременно развертывает первый и второй стабилизаторы, причем при обнаружении отклонения угла крена от требуемого угла крена, вызванного вхождением одного из стабилизаторов в контакт с грунтом, контроллер автоматически прекращает развертывание указанного стабилизатора и продолжает развертывание другого стабилизатора до тех пор, пока не будет получен требуемый угол крена.
Контроллер предпочтительно автоматически регулирует угол крена до требуемого угла крена, что позволяет сэкономить время и, соответственно, увеличить производительность.
Требуемый угол крена может быть перпендикулярным относительно направления силы тяжести. Требуемый угол крена может отличаться от угла, перпендикулярного к направлению силы тяжести. Погрузочно-разгрузочное транспортное средство может быть оснащено рабочим органом, входящим в контакт с грунтом и выполненным с возможностью выкапывания земли или манипулирования землей иным образом.
Согласно второму аспекту в настоящем изобретении предложен способ автоматической ориентации погрузочно-разгрузочного транспортного средства под требуемым углом, причем согласно указанному способу: в указанном транспортном средстве предусматривают транспортировочное устройство, входящее в контакт с грунтом и функционально соединенное с шасси транспортного средства, с правой стороны транспортного средства предусматривают первый стабилизатор, причем указанный первый стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема правой стороны шасси, с левой стороны транспортного средства предусматривают второй стабилизатор, причем указанный второй стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема левой стороны шасси, предусматривают контроллер для управления функционированием первого и второго стабилизаторов в ответ на введенные оператором данные, причем указанный способ содержит следующие этапы: устанавливают транспортное средство на грунт так, что первый и второй стабилизаторы не введены в контакт с грунтом, причем шасси имеет начальный угол крена, обеспечивают требуемый угол крена, подают на контроллер введенные оператором данные, требующие развертывания стабилизаторов, причем контроллер одновременно развертывает первый и второй стабилизаторы, причем при обнаружении изменения угла крена в направлении требуемого угла крена, вызванного вхождением одного из стабилизаторов в контакт с грунтом, контроллер автоматически прекращает развертывание другого стабилизатора и продолжает развертывание указанного одного стабилизатора до тех пор, пока не будет получен требуемый угол крена.
Согласно другому аспекту в настоящем изобретении предложен способ управления погрузочно-разгрузочным транспортным средством, причем указанный способ предусматривает применение способа согласно второму аспекту настоящего изобретения для автоматической ориентации погрузочно-разгрузочного транспортного средства под требуемым углом, причем указанное погрузочно-разгрузочное транспортное средство содержит входящий в контакт с грунтом рабочий орган, при этом указанный способ содержит последовательный этап, на котором используют указанный рабочий орган, входящий в контакт с грунтом, для выполнения земляных работ.
Краткое описание чертежей
Ниже в качестве примера приведено описание настоящего изобретения со ссылками на прилагаемые чертежи, на которых изображено следующее.
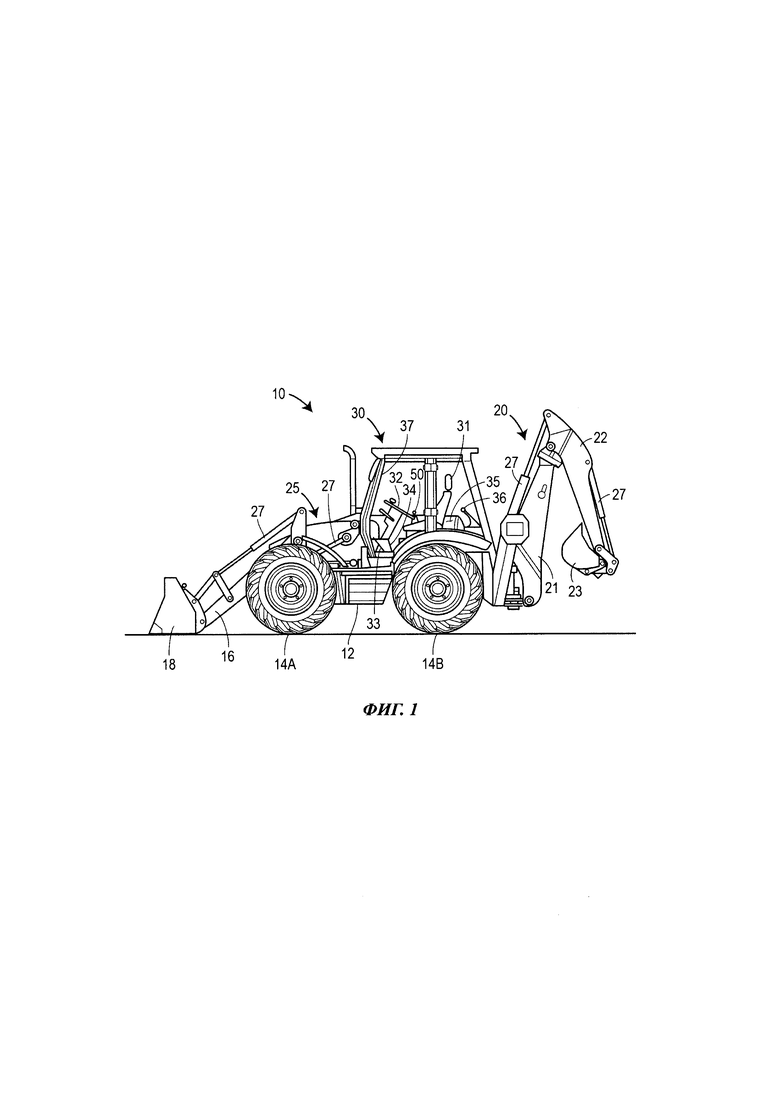
На фиг. 1 на виде сбоку показано предлагаемое в настоящем изобретении транспортное средство.
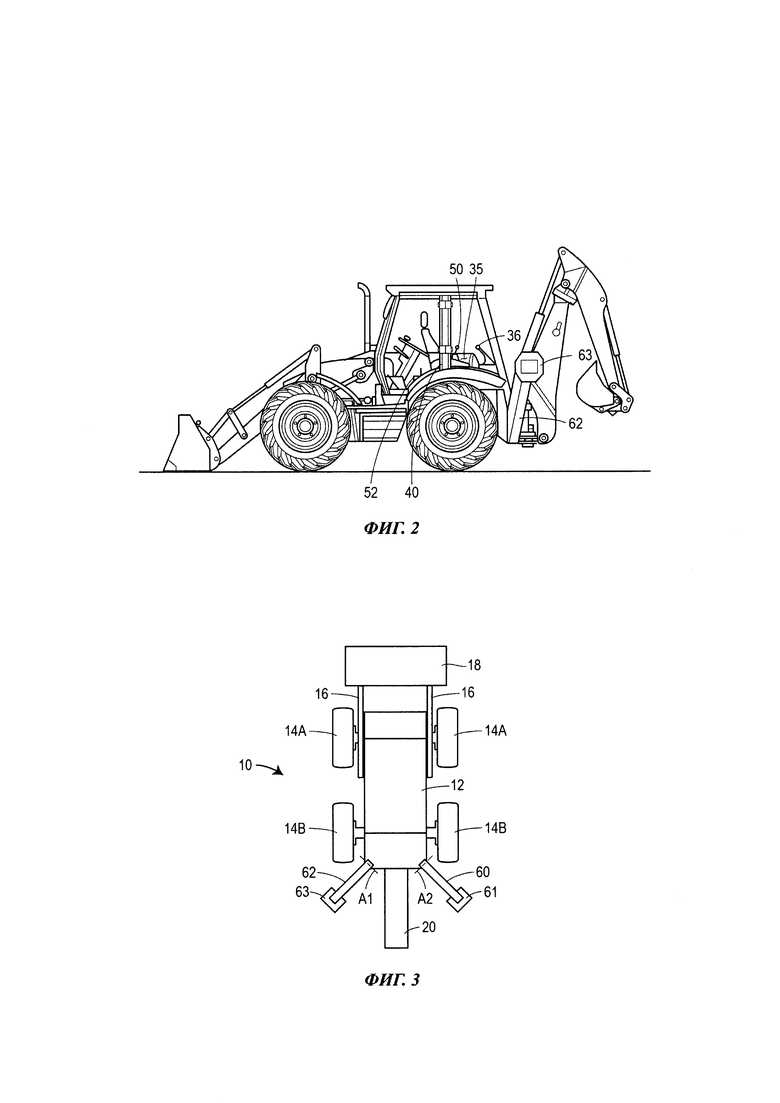
На фиг. 2 на виде сбоку показано транспортное средство с фиг. 1, причем сиденье оператора ориентировано назад.
На фиг. 3 схематично на виде сверху показано транспортное средство с фиг. 1 и 2.
Осуществление изобретения
На фиг. 1-3 показано погрузочно-разгрузочное транспортное средство в виде погрузчика 10 с обратной лопатой, содержащего шасси 12, которое опирается на движущееся (или транспортировочное) устройство, входящее в контакт с грунтом и выполненное в виде передних колес 14А и задних колес 14В. На шасси установлен загрузочный рычаг 16, впереди которого прикреплен рабочий орган, в данном случае - загрузочный ковш 18. Указанный загрузочный рычаг и указанный загрузочный ковш расположены в передней части транспортного средства.
Указанное транспортное средство содержит также задний правый стабилизатор 60 и задний левый стабилизатор 62 (см. фиг. 3). Задний левый стабилизатор прикреплен к шасси транспортного средства с возможностью поворота вокруг по существу горизонтальной оси А1. Гидравлический цилиндр (не показан) может обеспечивать перемещение заднего левого стабилизатора из убранного положения, показанного на фиг. 2, в развернутое положение, показанное на фиг. 3, таким образом, чтобы подушка 63 входила в контакт с грунтом.
По аналогии, задний правый стабилизатор прикреплен к шасси транспортного средства с возможностью поворота вокруг по существу горизонтальной оси А2. Гидравлический цилиндр (не показан) может обеспечивать поворот заднего правого стабилизатора из убранного положения в развернутое положение, показанное на фиг. 3, таким образом, чтобы подушка 61 входила в контакт с грунтом.
К задней части транспортного средства прикреплена обратная лопата 20, содержащая стрелу 21, рукоять 22 стрелы и ковш 23 (см. фиг. 1). Транспортное средство содержит двигатель 25, обеспечивающий подачу питания для приведения в действие транспортного средства и движения по земле. Кроме того, двигатель 25 обеспечивает питание для управления работой гидравлического насоса, выполненного с возможностью избирательной подачи рабочей жидкости под давлением в различные цилиндры 27 транспортного средства для управления загрузочным рычагом, загрузочным ковшом, стрелой, грейфером, ковшом, задним правым стабилизатором и т.д. и обеспечения, тем самым, возможности манипулирования материалом. Кроме того, транспортное средство содержит кабину 30 оператора, в которой предусмотрено сиденье 31 оператора. В кабине оператора находятся органы управления, в частности, рулевое колесо 32, педаль 33 тормоза, педаль 34 управления дроссельной заслонкой, манетка 35 управления дроссельной заслонкой и рычаг 36 управления обратной лопатой.
Как показано на фиг. 1, сиденье 31 оператора ориентировано вперед. Сиденье оператора установлено с возможностью поворота и может быть повернуто в положение, показанное на фиг. 2, где оно ориентировано в направлении задней части транспортного средства.
Указанный погрузчик 10 с обратной лопатой содержит также устройство 50 ввода данных оператором и контроллер 52.
Таким образом, обеспечена возможность автоматического развертывания стабилизаторов, которые способны переместить транспортное средство для получения требуемого угла крена. Автоматическое развертывание стабилизаторов экономит время, что позволяет оператору начать работу с обратной лопатой раньше, чем в остальных случаях, а это, в свою очередь, повышает производительность.
В частности, указанное устройство ввода данных оператором обеспечивает интерфейс между оператором и машиной. Посредством указанного устройства 50 ввода данных оператором можно ввести данные о требуемом угле крена. Угол крена можно задать относительно локальной поверхности грунта. Так, например, можно задать, чтобы угол крена был параллелен локальной поверхности грунта.
В качестве альтернативного варианта, угол крена можно задать в виде любого другого угла, не параллельного грунту.
Кроме того, угол крена можно задать относительно глобальной системы координат, в частности, относительно направления силы тяжести. Например, можно задать, чтобы угол крена был перпендикулярен к направлению силы тяжести. В качестве альтернативного варианта, угол крена можно задать в виде любого другого угла, не перпендикулярного к направлению силы тяжести.
Требуемый угол крена устанавливает угол оси 21А поворота стрелы. При этом обратная лопата будет поворачиваться относительно шасси вокруг указанной оси 21А. Угловое положение относительно указанной оси стрелы задает множество плоскостей, в которых могут двигаться стрела, рукоять стрелы и ковш.
В одном из примеров может понадобиться выкопать траншею по контуру наклонного участка местности, при этом указанная траншея проходит перпендикулярно к направлению силы тяжести. При таких обстоятельствах следует задать, чтобы требуемый угол крена проходил перпендикулярно к направлению силы тяжести и, соответственно, не параллельно локальной поверхности грунта.
В качестве альтернативного варианта, может потребоваться выкопать траншею, перпендикулярную к локальной поверхности грунта, при этом следует задать, чтобы требуемый угол крена проходил параллельно локальной поверхности грунта. Если локальная поверхность грунта является горизонтальной, то будет выкопана вертикальная траншея. Однако, если локальная поверхность грунта имеет боковой наклон, то траншея будет иметь такой же наклон.
В зависимости от рабочего органа, используемого с обратной лопатой, и от выполняемой задачи можно выбрать различные углы крена, отличные от указанного угла, перпендикулярного к направлению силы тяжести, или указанного угла, параллельного грунту. Такие альтернативные углы крена можно использовать при работе с навесными пневматическими молотами, навесными гидравлическими молотами и т.д.
Устройство ввода данных оператором можно также использовать для ввода данных о требуемой высоте задней части транспортного средства над грунтом. Высота задней части транспортного средства над грунтом задает то, какая часть веса транспортного средства будет приходиться на стабилизаторы, а какая часть веса транспортного средства будет приходиться на задние шины. Когда стабилизаторы находятся в полностью убранном положении, весь вес задней части транспортного средства приходится на задние шины. Когда стабилизаторы полностью развернуты, задние колеса приподняты над грунтом, и, соответственно, весь вес задней части транспортного средства приходится на стабилизаторы, а задние шины при этом не несут никакой нагрузки. Как правило, заднюю часть шасси можно поднимать так, чтобы основная часть веса задней части транспортного средства приходилась на стабилизаторы или чтобы весь вес задней части транспортного средства приходился на стабилизаторы. Таким образом, задние шины обычно могут только касаться грунта или могут быть выведены из непосредственного контакта с грунтом.
Указанный контроллер 52 может содержать датчик крена, выполненный с возможностью определения мгновенного угла крена шасси. Указанный датчик крена может определять мгновенный угол крена шасси относительно глобальной системы координат.
Запоминающее устройство контроллера может быть выполнено с возможностью определения угла крена, когда стабилизаторы находятся в убранном положении. Такой угол крена задает боковой наклон локальной поверхности грунта, поскольку при нахождении стабилизаторов в убранном положении угол крена шасси проходит параллельно локальной поверхности грунта. Если локальная поверхность грунта находится на боковом склоне, то шасси будет ориентировано под аналогичным углом к боковому склону.
Указанный контроллер может быть соединен с другими датчиками. Указанный контроллер может быть выполнен с возможностью определения на основании данных от других датчиков величины нагрузки задней части транспортного средства, воспринимаемой шинами, и/или величины нагрузки задней части транспортного средства, воспринимаемой стабилизаторами, когда они находятся в развернутом положении.
Указанный погрузчик 10 с обратной лопатой функционирует следующим образом.
Оператор приводит в движение транспортное средство и доставляет его на требуемый участок, на котором необходимо выполнить соответствующую работу. В данном примере указанный участок находится на склоне, причем правая сторона транспортного средства расположена выше, чем левая сторона транспортного средства. Оператор поворачивает сиденье так, что оно оказывается ориентированным назад, как показано на фиг. 2, и вводит данные о требуемом угле крена. В рассматриваемом примере требуемый угол крена представляет собой угол крена, заданный относительно глобальной системы координат, причем в данном примере угол крена перпендикулярен к направлению силы тяжести. Кроме того, оператор вводит данные о требуемой высоте задней части транспортного средства над грунтом. В рассматриваемом примере высоту выбирают так, чтобы вес задней части транспортного средства полностью приходился на стабилизаторы, при этом задние шины, соответственно, будут находиться на расстоянии от грунта.
Затем оператор вводит в контроллер данные, требующие развертывания стабилизаторов. В данном примере, оператор нажимает одну кнопку, например, обозначенную как «развертывание стабилизаторов». При этом контроллер автоматически развертывает стабилизаторы. В частности, указанный контроллер автоматически развертывает одновременно задний правый и задний левый стабилизаторы. Поскольку каждый стабилизатор поворачивается в направлении вниз вокруг своей оси, один из стабилизаторов соприкоснется с грунтом первым, в данном примере задний правый стабилизатор соприкоснется с грунтом раньше, чем задний левый стабилизатор. Когда задний правый стабилизатор входит в соприкосновение с грунтом, шасси наклоняется (или кренится) влево, то есть, отклоняется от требуемого угла крена. Контроллер распознает такое изменение угла крена и автоматически останавливает развертывание заднего правого стабилизатора, продолжая при этом развертывание заднего левого стабилизатора. Задний левый стабилизатор входит в соприкосновение с грунтом и наклоняет (или создает крен) шасси, обеспечивая требуемый угол крена. Контроллер может контролировать указанное движение крена и определять, когда мгновенный угол крена будет соответствовать требуемому углу крена. Если в случае соответствия мгновенного угла крена требуемому углу крена вес задней части транспортного средства будет приходиться только на задний правый и задний левый стабилизаторы, контроллер автоматически прекратит дальнейшее развертывание заднего левого стабилизатора.
Однако, если в случае соответствия мгновенного угла крена требуемому углу крена, часть веса задней части транспортного средства будет по-прежнему приходиться на задние шины, то контроллер продолжит развертывать задний левый стабилизатор и начнет развертывание заднего правого стабилизатора. Это приведет к подъему задней части шасси при требуемом угле крена. Когда задняя часть шасси будет поднята так, что на задние шины вообще не будет приходиться вес задней части транспортного средства (то есть, вес задней части транспортного средства будет полностью приходиться на стабилизаторы), контроллер одновременно прекратит развертывание заднего правого и заднего левого стабилизатора.
При этом машина оказывается установленной под заданным углом крена, и оператор может использовать обратную лопату, например, может начать выкапывать траншею. Если траншея имеет большую длину, то после выкапывания первой части траншеи оператор убирает стабилизаторы, поворачивает сиденье так, чтобы оно было ориентировано вперед, как показано на фиг. 1, перемещает машину вперед на небольшое расстояние, возможно, равное длине транспортного средства, и снова поворачивает сиденье так, чтобы оно было ориентировано назад, как показано на фиг. 2. На тот момент стабилизаторы все еще находятся в убранном положении. Поскольку оператор уже обеспечил требуемый угол крена, отсутствует необходимость в повторном вводе в контроллер данных о требуемом угле крена. Таким образом, все, что требуется от оператора, это нажать одну кнопку. Далее, контроллер автоматически одновременно развертывает стабилизаторы, машина устанавливается под требуемым углом крена, а задняя часть транспортного средства располагается на требуемой высоте, так, что оператор может незамедлительно продолжить использование обратной лопаты для выкапывания траншеи.
Оператор может выкапывать траншею в течение всего рабочего дня, постепенно перемещая машину вперед и выполняя быстрое развертывание стабилизаторов.
В частности, если оператор установил требуемый угол крена и требуемую высоту задней части транспортного средства над грунтом, то все, что от него требуется, это нажать одну кнопку для развертывания стабилизаторов в заданное положение.
Следует отметить, что некоторые операторы погрузчиков с обратной лопатой, как правило, используют только ковш, присоединенный к концу рукояти стрелы. Эти операторы могут выполнять только выкапывание траншей, при этом, если данные о начальном требуемом угле крена и начальной требуемой высоте задней части транспортного средства над грунтом уже были когда-либо введены, изменение данных о двух указанных параметрах может больше никогда не потребоваться. При таких обстоятельствах развертывание задних стабилизаторов можно всегда осуществлять простым нажатием кнопки.
Очевидно, что настоящее изобретение позволяет исключить потери времени оператора на индивидуальное управление развертыванием правого и левого стабилизаторов.
Преимущество настоящего изобретения заключается в возможности обеспечения приоритетной системы управления, которая прекращает автоматическое развертывание стабилизаторов. В одном из примеров, для автоматического развертывания стабилизаторов устройство ввода данных оператором выполнено в виде одной кнопки, которую следует удерживать в нажатом состоянии до тех пор, пока стабилизаторы не будут развернуто в конечное положение. Если оператор намерен прекратить автоматическое развертывание стабилизаторов, то ему просто необходимо отпустить кнопку. Контроллер может распознать прекращение нажатия на кнопку для развертывания, в результате чего он прекращает развертывание стабилизаторов. Затем, если оператор решит продолжить развертывание стабилизаторов, он снова нажимает на указанную кнопку, при этом автоматическое развертывание стабилизаторов продолжается до тех пор, пока не будут получены требуемые угол крена и высота задней части транспортного средства, после чего контроллер автоматически прекращает развертывание стабилизаторов.
В приведенном выше примере, поскольку задний правый стабилизатор входит в соприкосновение с грунтом первым, шасси отклоняется от требуемого угла крена. В альтернативном варианте задний левый стабилизатор может соприкоснуться с грунтом первым и в этом случае шасси накренится в направлении требуемого угла крена. При таких обстоятельствах контроллер распознает такое изменение угла крена и автоматически продолжает развертывать задний левый стабилизатор до тех пор, пока не будет получен требуемый угол крена. Если в случае соответствия мгновенного угла крена требуемому углу крена вес задней части транспортного средства полностью не приходиться только на задний правый и задний левый стабилизаторы, контроллер автоматически прекращает дальнейшее развертывание заднего левого стабилизатора.
Однако, если в случае соответствия мгновенного угла крена требуемому углу крена, часть веса задней части транспортного средства будет по-прежнему приходиться на задние шины, контроллер продолжит развертывать задний левый стабилизатор и начнет развертывание заднего правого стабилизатора. Это приведет к подъему задней части шасси под требуемым углом крена. Когда задняя часть шасси будет поднята так, что на задние шины вообще не будет приходиться вес задней части транспортного средства (то есть, вес задней части транспортного средства будет полностью приходиться на стабилизаторы), контроллер одновременно прекратит развертывание заднего правого и заднего левого стабилизаторов.
Как описано выше, контроллер обеспечивает автоматическое развертывание стабилизаторов до тех пор, пока не будут получены требуемый угол крена и требуемая высота задней части транспортного средства над грунтом. В других вариантах осуществления настоящего изобретения контроллер может функционировать просто до тех пор, пока не будет получен требуемый угол крена.
В еще одном варианте осуществления настоящего изобретения в указанное устройство ввода данных оператором можно ввести данные о требуемом угле наклона шасси. Система управления может автоматически регулировать наклон транспортного средства, в частности, путем развертывания дополнительного средства, входящего в контакт с грунтом, например, путем развертывания загрузочного рычага 16 так, чтобы загрузочный ковш 18 входил в контакт с грунтом и поднимал переднюю часть шасси, создавая требуемый угол наклона. Автоматическое регулирование наклона может происходить после автоматического регулирование угла крена. В качестве альтернативного варианта, автоматическое регулирование наклона может происходить одновременно с автоматическим регулированием угла крена.
Как раскрыто выше, наклон можно регулировать путем развертывания загрузочного рычага 16 так, чтобы загрузочный ковш 18 входил в контакт с грунтом и поднимал переднюю часть шасси. В альтернативном варианте осуществления настоящего изобретения машина может иметь больше двух стабилизирующих ножек, в частности, машина может иметь четыре стабилизатора. Стабилизаторы могут быть установлены с возможностью поворота для вхождения в контакт с грунтом и/или с возможностью развертывания в вертикальном направлении для перехода в положение, при котором они входят в контакт с грунтом.
Описанные выше стабилизаторы выполнены с возможностью поворота относительно грунта. Однако настоящее изобретение в равной степени может быть использовано для других типов стабилизаторов, в частности, для стабилизаторов, выполненных с возможностью развертывания в вертикальном направлении, то есть, с возможностью поступательного движения вертикально вниз в развернутое положение (а не с возможностью поворота вокруг по существу горизонтальной оси).
В других вариантах осуществления настоящего изобретения система может определять начальный угол крена транспортного средства перед развертыванием стабилизаторов. Если такой начальный угол крена превышает предварительно заданный угол крена, то система может предотвратить автоматическое выравнивание машины. При этом положение машины все-таки можно выровнять, однако, в таком случае указанное выравнивание оператор выполняет вручную.
Как описано выше, ввод данных оператором осуществляется посредством одной кнопки или другим подобным способом. В других вариантах осуществления настоящего изобретения ввод данных оператором может происходить посредством двух устройств ввода, например, ручное управление правым стабилизатором может осуществляться посредством рычага управления правым стабилизатором, а ручное управление левым стабилизатором - посредством рычага управления левым стабилизатором. Указанные рычаги могут быть подпружинены в среднем положении. Движение одного рычага в одном направлении может вызывать подъем соответствующего стабилизатора, а движение рычага в другом направлении - опускание соответствующего стабилизатора. При таких обстоятельствах для использования автоматического выравнивания оба рычага можно совместно переместить одним движением в фиксированное положение и т.д., чтобы указать, что требуется автоматическое выравнивание.
Как описано выше, после достижения требуемого угла крена автоматическое управление креном прекращается. Однако, в других вариантах осуществления настоящего изобретения автоматическое управление креном может продолжаться и после достижения требуемого угла крена. Так, например, если требуемый угол крена получен, значительный вес будет действовать на подушки стабилизаторов, в результате чего они начнут погружаться в грунт. Если одна подушка стабилизатора проникает в грунт глубже, чем другая, то угол крена будет изменяться. Система может быть выполнена с возможностью контроля угла крена и корректировки его значения. Угол крена можно корректировать в течение предварительно заданного периода времени после достижения требуемого угла крена, например, корректировку можно осуществлять в течение периода времени, равного 10 секундам или 1 минуте или 2 минутам после получения требуемого угла крена. Кроме того, дальнейшее погружение стабилизатора в грунт может быть вызвано работой машины. Соответственно, указанную корректировку можно осуществлять постоянно в ходе работы машины.
Настоящее изобретение относится к способу автоматической ориентации погрузочно-разгрузочного транспортного средства под требуемым углом. Согласно указанному способу в указанном транспортном средстве предусматривают транспортировочное устройство, входящее в контакт с грунтом и функционально соединенное с шасси транспортного средства. С правой стороны транспортного средства предусматривают первый стабилизатор, причем указанный первый стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема правой стороны шасси. С левой стороны транспортного средства предусматривают второй стабилизатор, причем указанный второй стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема левой стороны шасси. Предусматривают контроллер для управления функционированием первого и второго стабилизаторов в ответ на введенные оператором данные, причем указанный способ содержит следующие этапы: устанавливают транспортное средство на грунт так, что первый и второй стабилизаторы не введены в контакт с грунтом, причем шасси имеет начальный угол крена, обеспечивают требуемый угол крена, подают на контроллер введенные оператором данные, требующие развертывания стабилизаторов, причем контроллер одновременно развертывает первый и второй стабилизаторы, причем при обнаружении отклонения угла крена от требуемого угла крена, вызванного вхождением одного из стабилизаторов в контакт с грунтом, контроллер автоматически прекращает развертывание указанного стабилизатора и продолжает развертывание другого стабилизатора до тех пор, пока не будет получен требуемый угол крена. Изобретение обеспечивает ускорение регулировки стабилизаторов. 2 н. и 17 з.п. ф-лы, 3 ил.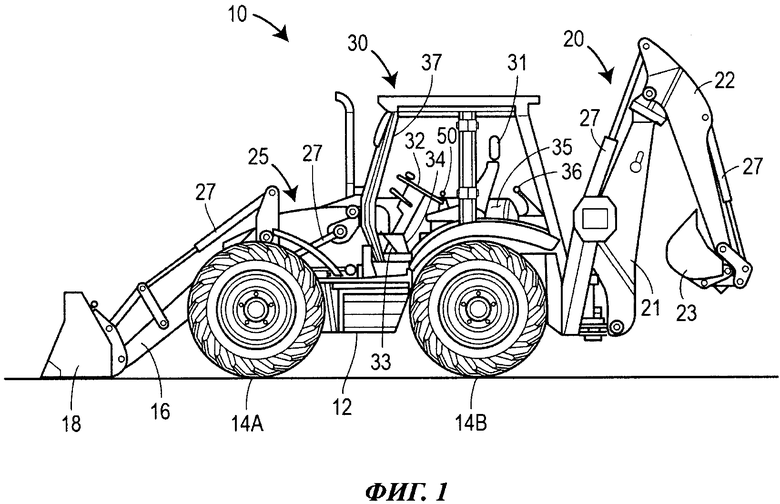
1. Способ автоматической ориентации погрузочно-разгрузочного транспортного средства под требуемым углом, причем согласно указанному способу:
в указанном транспортном средстве предусматривают транспортировочное устройство, входящее в контакт с грунтом и функционально соединенное с шасси транспортного средства,
с правой стороны транспортного средства предусматривают первый стабилизатор, причем указанный первый стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема правой стороны шасси,
с левой стороны транспортного средства предусматривают второй стабилизатор, причем указанный второй стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема левой стороны шасси,
предусматривают контроллер для управления функционированием первого и второго стабилизаторов в ответ на введенные оператором данные, причем указанный способ содержит следующие этапы:
устанавливают транспортное средство на грунт так, что первый и второй стабилизаторы не введены в контакт с грунтом, причем шасси имеет начальный угол крена,
обеспечивают требуемый угол крена,
подают на контроллер введенные оператором данные, требующие развертывания стабилизаторов, причем контроллер одновременно развертывает первый и второй стабилизаторы,
причем при обнаружении отклонения угла крена от требуемого угла крена, вызванного вхождением одного из стабилизаторов в контакт с грунтом, контроллер автоматически прекращает развертывание указанного стабилизатора и продолжает развертывание другого стабилизатора до тех пор, пока не будет получен требуемый угол крена.
2. Способ по п. 1, при котором при достижении требуемого угла крена контроллер автоматически прекращает развертывание указанного другого стабилизатора.
3. Способ по п. 1, при котором при достижении требуемого угла крена контроллер продолжает развертывание указанного другого стабилизатора и начинает развертывание указанного первого из стабилизаторов для подъема шасси под требуемым углом крена.
4. Способ по п. 3, при котором при достижении требуемой высоты шасси над грунтом контроллер автоматически прекращает развертывание стабилизаторов для прекращения подъема шасси.
5. Способ по любому из пп. 1-4, содержащий последующий этап, на котором автоматически повторяют выполнение способа по любому из пп. 1 - 4.
6. Способ автоматической ориентации погрузочно-разгрузочного транспортного средства под требуемым углом, причем согласно указанному способу:
в указанном транспортном средстве предусматривают транспортировочное устройство, входящее в контакт с грунтом и функционально соединенное с шасси транспортного средства,
с правой стороны транспортного средства предусматривают первый стабилизатор, причем указанный первый стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема правой стороны шасси,
с левой стороны транспортного средства предусматривают второй стабилизатор, причем указанный второй стабилизатор выполнен с возможностью избирательного вхождения в контакт с грунтом для подъема левой стороны шасси,
предусматривают контроллер для управления функционированием первого и второго стабилизаторов в ответ на введенные оператором данные, причем указанный способ содержит следующие этапы:
устанавливают транспортное средство на грунт так, что первый и второй стабилизаторы не введены в контакт с грунтом, причем шасси имеет начальный угол крена,
обеспечивают требуемый угол крена,
подают на контроллер введенные оператором данные, требующие развертывания стабилизаторов, причем контроллер одновременно развертывает первый и второй стабилизаторы,
причем при обнаружении изменения угла крена в направлении требуемого угла крена, вызванного вхождением одного из стабилизаторов в контакт с грунтом, контроллер автоматически прекращает развертывание другого стабилизатора и продолжает развертывание указанного одного стабилизатора до тех пор, пока не будет получен требуемый угол крена.
7. Способ по п. 6, при котором при достижении требуемого угла крена контроллер автоматически прекращает развертывание указанного одного стабилизатора.
8. Способ по п. 6, при котором при достижении требуемого угла крена контроллер продолжает развертывание указанного одного стабилизатора и начинает развертывание другого стабилизатора для подъема шасси под требуемым углом крена.
9. Способ по п. 8, при котором при достижении требуемой высоты шасси над грунтом контроллер автоматически прекращает развертывание стабилизаторов для прекращения подъема шасси.
10. Способ по любому из пп. 6-9, при котором требуемый угол крена задают относительно локальной поверхности грунта.
11. Способ по любому из пп. 6-9, при котором требуемый угол крена задают относительно глобальной системы координат.
12. Способ по любому из пп. 6-9, содержащий этап, на котором задают скорость, с которой следует развертывать стабилизаторы, после чего развертывают стабилизаторы с заданной скоростью.
13. Способ по любому из пп. 6-9, предусматривающий переход на ручное управление для прекращения автоматического развертывания стабилизаторов.
14. Способ по п. 13, в котором оператор вводит данные путем приведения в действие одного устройства ввода данных оператором, в частности одного переключателя, одного рычага, одной кнопки.
15. Способ по п. 14, при котором указанное ручное управление осуществляют отключением указанного одного устройства ввода данных оператором.
16. Способ по любому из пп. 6-9, содержащий следующие этапы: обеспечивают требуемый угол наклона, подают на контроллер введенные оператором данные, требующие изменения угла наклона от текущего значения угла наклона к требуемому значению угла наклона, так чтобы контроллер автоматически обеспечивал развертывание входящего в контакт с грунтом устройства для регулирования наклона транспортного средства до тех пор, пока не будет получен требуемый угол наклона.
17. Способ по любому из пп. 6-9, содержащий этапы, на которых определяют начальный угол крена, обеспечивают предварительно заданный максимальный угол крена, причем, если начальный угол крена превышает указанный предварительно заданный максимальный угол крена, то в способе предусматривают этап, на котором предотвращают автоматическую ориентацию погрузочно-разгрузочного транспортного средства под требуемым углом.
18. Способ по любому из пп. 6-9, содержащий последующий этап, на котором автоматически повторяют выполнение способа по любому из пп. 6-9.
19. Способ по п. 16, дополнительно содержащий этап, на котором автоматически повторяют выполнение способа по п. 16.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 5580095 А1, 03.12.1996 | |||
| Устройство автоматического контроля положения платформы подъемно-транспортной машины | 1987 |
|
SU1430476A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ | 2007 |
|
RU2342310C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫНОСНЫМИ ОПОРАМИФу^'.Д 'i.-i.''--'—-• | 1971 |
|
SU422681A1 |
| СПОСОБ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ-УСТАНОВКИ НЕСУЩЕЙ ГРУЗОВОЙ ПЛАТФОРМЫ | 2011 |
|
RU2496710C2 |
| Пинцет для закупорки флаконов | 1951 |
|
SU94556A1 |

