Изобретение относится к области технических средств судовождения, в частности к корректируемым гироазимуткомпасам (ГАК) и гироскопическим курсоуказателям (ГКУ), предназначенным для определения курса относительно географического меридиана - в режиме гирокомпаса (ГК) или угла отклонения от заданного направления - в режиме гироазимута.
Как известно, названные гироазимуткомпасы и гироскопические курсоуказатели имеют широтную и скоростную девиацию. Для осуществления широтной коррекции к гироскопическому чувствительному элементу (ЧЭ) гироазимуткомпаса прикладывается горизонтальный корректирующий момент (коррекция в азимуте), а для скоростной коррекции - вертикальный корректирующий момент (коррекция по высоте) [Е.Л.Смирнов, А.В.Яловенко, А.А.Якушенков. Технические средства судовождения. Теория. - М.: Транспорт, 1988. - 376 с.].
Момент широтной коррекции предназначен для исключения широтной девиации гироазимуткомпаса. При этом указанный момент состоит из двух частей:
- момент коррекции широтной девиации, возникшей от вертикальной составляющей угловой скорости вращения Земли, пропорциональный широте места судна;
- момент коррекции широтной девиации, возникшей от вертикальной составляющей угловой скорости вращения судна вследствие его движения по параллели, также пропорциональный широте места судна.
Таким образом, названный момент широтной коррекции представляют следующим выражением:

где Н - кинетический момент гироскопа [Н·м·с];
ω0 - угловая скорость вращения Земли [рад/с];
φ - широта плавания [градусы, минуты];
VE - скорость судна по параллели [м/с];
R0 - радиус Земли [м].
Реализация указанной широтной коррекции возможна, когда в схему гироазимуткомпаса вводится текущая широта места судна и его скорость. Причем автоматическая автономная коррекция широты места судна во время плавания является актуальной назревшей технической задачей.
Вертикальный момент коррекции предназначен для исключения скоростной девиации, возникающей вследствие движения судна по меридиану. Как известно, он вырабатывается в соответствии с выражением
где VN - меридианальная составляющая скорости судна (составляющая скорости судна по меридиану) [м/с]. При этом данная составляющая должна быть использована для выработки сигналов автоматической автономной коррекции широты места судна.
Известны гироазимуткомпасы «Вега» и «Вега-М» для судов арктического плавания, не имеющие устройства автоматической коррекции широты места судна [Е.Л.Смирнов, А.В.Яловенко, А.А.Якушенков. Технические средства судовождения. Теория. - М.: Транспорт, 1988. - 376 с.], содержащие центральный прибор с гироскопическим чувствительным элементом и схемой управления, корректор-транслятор с электромеханической вычислительной схемой коррекции, в состав которой входят узлы ручного ввода широты и скорости судна. Скорость судна в них также может вводиться и автоматически от лага через блок ввода скорости.
Недостатком известных гироазимуткомпасов является снижение точности их работы ввиду отсутствия непрерывной автоматической коррекции широты места судна. Для получения приемлемой точности выработки курса ручной ввод широты рекомендуется осуществлять в широтах до 70° - через 2-3°, а в более высоких широтах - через 0,5° [Б.М.Коган, М.В.Чичинадзе. Судовой гироазимуткомпас «Вега». - М.: «Транспорт», 1983. - 200 с.]. Отсюда следует, что при широтном плавании на скорости 10-15 узлов коррекция широты должна производиться не реже двух-трех раз в сутки. Обстановка во время плавания может сложиться так, что своевременная ручная корректура широты может оказаться невозможной. Ручной ввод нежелателен еще и потому, что при этом в силу вступает человеческий фактор. Известны случаи, когда широта вводилась с обратным знаком, что снижало точность показаний гирокомпаса до недопустимых значений [Б.М.Коган, М.В.Чичинадзе. Судовой гироазимуткомпас «Вега». - М.: «Транспорт», 1983. - 200 с.].
Известен гирокомпас с внешней коррекцией [патент на изобретение №2063611 РФ], содержащий основной прибор с гироскопическим чувствительным элементом и схемой управления, прибор коррекции с электромеханической вычислительной схемой, в состав которой входят узлы ввода широты места и скорости судна, позволяющие ввести эту информацию, в частности, по широте вручную или автоматически, но автоматически лишь только от внешних источников.
Недостатком известного гирокурсоуказателя остается необходимость ручного ввода широты в случаях, когда этот гирокурсоуказатель устанавливают на судне без навигационного комплекса или в случаях, когда невозможна трансляция широты от внешнего источника, например от автопрокладчика.
Известен принятый за прототип гироазимуткомпас «Гюйс» [Е.Л.Смирнов, А.В.Яловенко, В.К.Перфильев, В.В.Воронов, В.В.Сизов. Технические средства судовождения. Том 2. Конструкция и эксплуатация. - СПб.: «Элмор», 2000. - 656 с.] с электронной вычислительной схемой обработки информации и с автоматическим вводом и коррекцией широты места судна, содержащий пульт оператора (ПО), имеющий узлы ручного ввода широты места и скорости судна, выходы которых соединены соответственно с первым и вторым входами блока электронного (БЭ). Блок электронный подключен к блоку внешнего источника информации: третий вход - к блоку внешнего источника в виде судового лага, четвертый и пятый вход - к блоку внешнего источника в виде приемоиндикатора спутниковой навигационной системы GPS. Первый и второй выходы блока электронного соединены соответственно с первым и вторым входом центрального прибора с гироскопическим чувствительным элементом.
Недостатком известного гироазимуткомпаса остается ручной, то есть сопряженный с погрешностью, способ ввода широты места во время рейса судна в случаях, когда невозможно получить эту информацию в автоматическом режиме от внешнего источника - от приемоиндикатора спутниковой навигационной системы. Такое положение в этих случаях может сложиться при нарушении связи с приемоиндикатором или выходе его из строя, при отсутствии сигналов от спутников, а также в тех из таких гироазимуткомпасов, которые по той или иной причине не имеют связи с указанными приемоиндикаторами. В промежутках времени между ручной коррекцией широты места судна точность выработки корректирующих моментов, а следовательно, и точность курсоуказания снижаются.
Технической задачей, на которую направлено заявляемое изобретение, является устранение указанных недостатков, а именно создание автономной, то есть получаемой в схеме ГАК и сохраняющей автоматический режим, непрерывной коррекции широты места судна. Это обеспечит более высокую точность выработки момента широтной коррекции гироазимуткомпаса, а следовательно, и самого прибора в условиях, когда отсутствуют или не могут быть использованы внешние датчики широты, такие как приемоиндикатор спутниковой навигационной системы или автопрокладчик.
Указанная техническая задача достигается тем, что в известном гироазимуткомпасе с автоматической коррекцией широты места судна, содержащем пульт оператора, имеющего узлы ручного ввода данных широты места и скорости судна, блок электронный, блок внешнего источника информации и центральный прибор с гироскопическим чувствительным элементом, при этом выходы узлов ручного ввода широты места и скорости судна пульта оператора имеют сообщение соответственно с первым и вторым входами блока электронного, имеющего на входе связь с блоком внешнего источника информации и соединенного своим первым и вторым выходом соответственно с первым и вторым входами центрального прибора с гироскопическим чувствительным элементом, причем блок внешнего источника информации с функцией датчика скорости судна выполнен в виде судового лага и подключен к третьему входу блока электронного, в отличие от него в заявляемом дополнительно содержатся суммирующее устройство, усилитель и интегрирующее устройство. При этом упомянутый выход узла ручного ввода широты места судна соединен с первым входом суммирующего устройства, выход которого соединен с первым входом блока электронного, первый выход которого, в свою очередь, дополнительно соединен с входом усилителя, подключенного ко входу интегрирующего устройства, выход которого соединен со вторым входом суммирующего устройства. Блок внешнего источника информации с функцией датчика широты места судна в частном случае может быть выполнен в виде приемоиндикатора спутниковой навигационной системы GPS, подключенного к блоку электронному через четвертый и пятый входы. Целесообразно такое выполнение усилителя, при котором его коэффициент усиления установлен из соотношения
где величина 1,94 - это скорость судна в узлах, соответствующая скорости 1 м/с, то есть отношение количества секунд в часе к длине морской мили в метрах:
Данная величина служит для перевода единицы измерения скорости судна из м/с в узлы, в которых отградуированы шкалы узла ручного ввода скорости судна и судового лага, то есть скорость 1 м/с соответствует скорости 1,94 узла.
Совокупность отличительных и ограничительных признаков заявляемого изобретения, выражающаяся в установке дополнительно суммирующего устройства, усилителя и интегрирующего устройства в совокупности с их связями, обеспечивает достижение поставленной технической задачи следующим путем. В пульт оператора данные о широте места судна вводят через узел ручного ввода широты, с выхода которого снимается напряжение UφB, пропорциональное введенной широте места судна, которое поступает на первый вход дополнительно установленного суммирующего устройства. Его выход соединен с первым входом блока электронного. Кроме того, на блок электронный поступает одно из двух напряжений пропорциональных скорости судна: на второй вход блока электронного - UVB с выхода узла ручного ввода скорости судна с пульта оператора, или UVл на третий его вход - с блока внешнего источника информации в виде судового лага. В блоке электронном формируются напряжения, пропорциональные моментам скоростной и широтной коррекции. Напряжение, пропорциональное моменту скоростной коррекции, с первого выхода блока электронного подается на первый вход центрального прибора для коррекции гироскопического чувствительного элемента по высоте и одновременно - на вход дополнительно установленного усилителя с постоянным коэффициентом усиления, в частности пропорциональным нижеуказанному соотношению:
 ,
,
где величина 1,94 - это отношение количества секунд в часе к длине морской мили в метрах:
Данная величина служит для перевода единицы измерения скорости судна из м/с в узлы, в которых отградуированы шкалы узла ручного ввода скорости судна и судового лага, то есть скорость 1 м/с соответствует скорости 1,94 узла. Тогда меридиональная составляющая скорости судна VN в узлах будет равна
 .
.
Таким образом после выполнения операции усиления с заявляемым указанным коэффициентом с выхода усилителя снимается напряжение, пропорциональное меридиональной составляющей VN скорости судна в узлах, и подается на вход интегрирующего устройства. Известно, что интеграл по времени от меридиональной составляющей скорости судна VN, выраженной в узлах, равен без учета сжатия Земли приращению широты места судна Δφ, возникшему вследствие движения судна по меридиану и равному разности широт (РШ) между введенной и текущей широтой места судна:
 [градусы, угловые минуты широты],
[градусы, угловые минуты широты],
где VN - данная меридиональная составляющая скорости судна, выраженная в узлах;
Т1-T0 - пределы интегрирования, промежуток времени движения судна по меридиану [часы]; при этом 1 миля равна дуге 1' по широте.
Интегрирующее устройство интегрирует указанное напряжение по времени, вырабатывая напряжение UΔφ, пропорциональное приращению широты Δφ [градусы, угловые минуты широты] вследствие движения судна по меридиану, и подает его на второй вход суммирующего устройства. На первый вход суммирующего устройства из узла ручного ввода широты пульта оператора ранее поступило напряжение UφB, пропорциональное широте места φ, введенной вручную. В суммирующем устройстве путем сложения напряжений, пропорциональных введенной широте и полученному приращению широты вследствие движения судна по меридиану, решается задача получения напряжения, пропорционального текущей широте места судна φT в соответствии с выражением
 [градусы, минуты широты],
[градусы, минуты широты],
где φ - широта места судна, введенная в узел ввода широты пульта оператора [градусы, минуты широты];
Δφ - выработанное интегрирующим устройством приращение широты вследствие движения судна по меридиану [градусы, минуты широты].
В дальнейшем указанное напряжение, пропорциональное текущей широте места судна, с выхода суммирующего устройства поступает на первый вход блока электронного для выработки напряжений, пропорциональных моментам коррекции гироскопического чувствительного элемента.
Со второго выхода блока электронного на второй вход центрального прибора и подается напряжение, пропорциональное моменту этой широтной коррекции гироскопического чувствительного элемента.
Таким образом, дополнительно установленные суммирующее устройство, усилитель и интегрирующее устройство в совокупности с их связями выполняют функцию автоматической коррекции широты места судна и обеспечивают достижение поставленной технической задачи с получением следующих технических результатов - выполняется автономная автоматическая непрерывная коррекция широты места судна, что повышает точность курсоуказания и исключает ошибки обслуживающего персонала, такие как несвоевременный или неточный ручной ввод широты.
В частном случае, когда блок внешнего источника информации предусмотрен в виде приемоиндикатора спутниковой навигационной системы GPS, подключенного к четвертому и пятому входам блока электронного, широта места и скорость судна вводятся от данного приемоиндикатора.
В предлагаемом гироазимуткомпасе коррекция широты фактически является способом автоматической приборной выработки текущей (счислимой) широты места судна. Для определения необходимой частоты ручного вмешательства в коррекцию широты используется известная формула расчета точности счислимого места в милях [Мореходные таблицы (МТ-2000). - СПб.: ГУНИО МО РФ, 2002]
 [мили],
[мили],
где КC - коэффициент точности счисления [миля/час];
t - время плавания в часах.
Как известно, в широтах ниже 70° ручная коррекция широты должна осуществляться при ее изменении на 2-3°. Это означает, что погрешность в приборной счислимой широте не должна превышать 120-180 миль. При самых неблагоприятных условиях плавания, когда КC=2, такая погрешность в приборной широте накопится приблизительно через полгода непрерывного плавания. В высоких широтах более 70° необходимость ручного вмешательства во ввод широты будет возникать через 225 часов, то есть приблизительно через 9 суток. Данное обстоятельство подчеркивает актуальность решения назревшей технической задачи.
Предлагаемое изобретение поясняется чертежом
На чертеже представлена блок-схема, позволяющая реализовать заявляемый гироазимуткомпас с автоматической коррекцией широты места судна.
Заявляемый гироазимуткомпас с автоматической коррекцией широты места судна содержит пульт оператора 1, имеющий узел ручного ввода широты судна 2, выход которого соединен с первым входом суммирующего устройства 3, а выход суммирующего устройства 3, в свою очередь, соединен с первым входом блока электронного 4. Пульт оператора 1 содержит также узел ручного ввода скорости 5, выход которого соединен со вторым входом блока электронного 4. Первый и второй выходы блока электронного 4 соединены соответственно с первым и вторым входами центрального прибора 6 с гироскопическим чувствительным элементом (не показан). Первый выход блока электронного 4 соединен также со входом усилителя 7, выход которого соединен со входом интегрирующего устройства 8, выход которого, в свою очередь, соединен со вторым входом суммирующего устройства 3. К блоку электронному 4 подключен блок внешнего источника информации: к третьему входу - в виде судового лага 9, и, в частном случае, к четвертому и пятому его входам - в виде приемоиндикатора 10 спутниковой навигационной системы GPS.
Гироазимуткомпас с автоматической коррекцией широты места судна используют следующим образом.
При штатном запуске гироазимуткомпаса в порту с пульта оператора 1 вручную через узел 2 ручного ввода широты вводят широту φ места судна. Узел 2 вырабатывает напряжение, пропорциональное введенной широте UφB, и подает его на первый вход суммирующего устройства 3. Суммирующее устройство 3 преобразует и транслирует это напряжение в виде Uφ на первый вход блока электронного 4. В блок электронный 4 поступает одно из двух напряжений, пропорциональных скорости судна: на второй вход напряжение UVB из узла 5 ручного ввода скорости пульта оператора 1; на третий вход напряжение UVл от блока внешнего источника информации в виде судового лага 9. Блок электронный по информации о широте и скорости формирует сигналы моментов коррекции гироскопического чувствительного элемента (не показан). Сигнал момента скоростной коррекции, пропорциональный меридиональной составляющей скорости судна, снимается с первого выхода блока электронного 4 и поступает на первый вход центрального прибора 6 для создания вертикального момента коррекции на гироскопическом чувствительном элементе. Этот же сигнал скоростной коррекции с первого выхода блока электронного 4 подается на усилитель 7, где происходит его умножение на постоянный коэффициент усиления
 ,
,
где величина 1,94 - это отношение количества секунд в часе к длине морской мили в метрах:
 .
.
Данная величина служит для перевода единицы измерения скорости судна из м/с в узлы, в которых отградуированы шкалы узла ручного ввода скорости судна и судового лага, то есть скорость 1 м/с соответствует скорости 1,94 узла;
Н - кинетический момент гироскопа [Н·м·с];
R0 - радиус Земли [м].
Тогда меридиональная составляющая скорости судна в узлах будет равна
 .
.
Благодаря указанной операции усиления с выхода усилителя 7 снимается электрическое напряжение UVN, пропорциональное меридиональной составляющей скорости судна в узлах, которое поступает на вход интегрирующего устройства 8. Известно, что интеграл по времени от меридиональной составляющей скорости судна VN, выраженной в узлах, равен без учета сжатия Земли приращению широты места судна Δφ, возникшему вследствие движения судна по меридиану и равному разности широт (РШ) между введенной и текущей широтой места судна:
 [градусы, минуты широты],
[градусы, минуты широты],
где VN - данная меридиональная составляющая скорости судна, выраженная в узлах;
Т1-Т0 - пределы интегрирования, промежуток времени движения судна по меридиану [часы]; при этом 1 миля равна дуге 1' по широте.
В результате интегрирования сигнала меридиональной составляющей скорости судна формируется сигнал UΔφ, пропорциональный приращению Δφ широты вследствие движения судна по меридиану. Указанный сигнал поступает на второй вход суммирующего устройства 3, где складывается с ранее поступившим сигналом UφB, пропорциональным введенной широте φ. Таким образом решается задача непрерывной, автоматической автономной коррекции широты места судна, то есть выработки текущей широты места судна. В дальнейшем из суммирующего устройства 3 на первый вход блока электронного 4 транслируется напряжение, пропорциональное текущей широте места судна
 [градусы, минуты широты].
[градусы, минуты широты].
Сигнал момента широтной коррекции снимается со второго выхода блока электронного 4 и поступает на второй вход центрального прибора 6 для создания азимутального момента коррекции на гироскопическом чувствительном элементе. В частном случае использования блока внешнего источника информации в виде приемоиндикатора 10 спутниковой навигационной системы GPS широта места и скорость судна вводятся в блок электронный 4 через его четвертый и пятый входы. В этом случае блок электронный 4 формирует сигналы корректирующих моментов по данным названного приемоиндикатора 10. Суммирующее устройство 3, усилитель 7, интегрирующее устройство 8 продолжают работать. При отключении приемоиндикатора 10 на первый вход блока электронного 4 сразу же в автоматическом режиме будет поступать текущая широта места судна. Таким образом, и в этом случае полностью отпадает необходимость в ручной коррекции широты места судна.
Испытание опытной модели заявляемого изобретения показало достижение технических результатов: обеспечивалась автономная автоматическая коррекция широты места судна, что способствовало точной выработке моментов коррекции, что, в свою очередь, повышает точность курсоуказания. В лабораторных условиях в диапазоне северных широт от 30 до 50° на курсе судна 45° максимальная погрешность выработки курса составила 0,1°.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ ВЫРАБОТКОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2470260C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263329C1 |
| УСТРОЙСТВО СОВМЕСТИМОСТИ ИНТЕРФЕЙСОВ | 2017 |
|
RU2663549C1 |
| Гироскопическое устройство для определения курса | 1989 |
|
SU1783302A1 |
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |
| Автопрокладчик | 1979 |
|
SU836524A1 |
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
Изобретение относится к области технических средств судовождения, в частности к корректируемым гироазимуткомпасам (ГАК) и гироскопическим курсоуказателям (ГКУ), предназначенным для определения курса относительно географического меридиана или угла отклонения от заданного направления. Техническим результатом является создание автономной и сохраняющей автоматический режим непрерывной коррекции широты места судна, обеспечение высокой точности выработки момента широтной коррекции ГАК. ГАК с автоматической коррекцией широты места судна содержит пульт оператора, имеющий узлы ручного ввода данных широты места и скорости судна, блок электронный, блок внешнего источника информации и центральный прибор с гироскопическим чувствительным элементом. ГАК дополнительно содержит суммирующее устройство, усилитель и интегрирующее устройство. Дополнительно ГАК содержит приемоиндикатор спутниковой навигационной системы GPS. 2 з.п. ф-лы, 1 ил.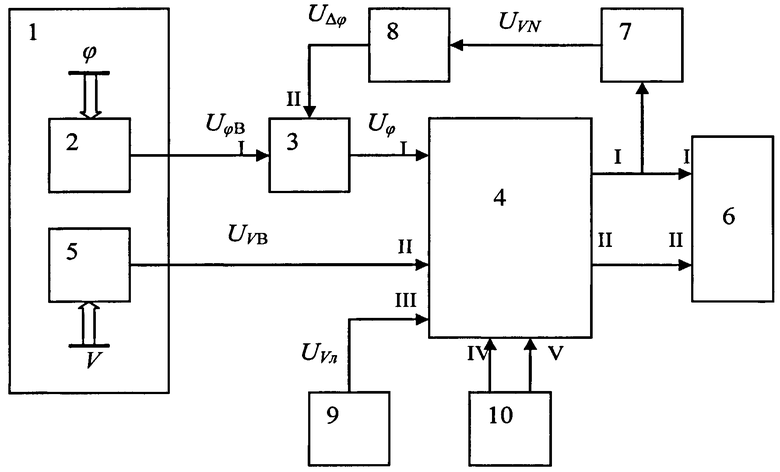
1. Гироазимуткомпас с автоматической коррекцией широты места судна, содержащий пульт оператора, имеющий узлы ручного ввода данных широты места и скорости судна, блок электронный, блок внешнего источника информации и центральный прибор с гироскопическим чувствительным элементом, при этом выходы узлов ручного ввода широты места и скорости судна пульта оператора имеют сообщение соответственно с первым и вторым входами блока электронного, имеющего на входе связь с блоком внешнего источника информации и соединенного своим первым и вторым выходом соответственно с первым и вторым входами центрального прибора с гироскопическим чувствительным элементом, причем блок внешнего источника информации с функцией датчика скорости судна выполнен в виде судового лага и подключен к третьему входу блока электронного, отличающийся тем, что он дополнительно содержит суммирующее устройство, усилитель и интегрирующее устройство, при этом упомянутый выход узла ручного ввода широты места судна соединен с первым входом суммирующего устройства, выход которого соединен с первым входом блока электронного, первый выход которого, в свою очередь, дополнительно соединен со входом усилителя, подключенного ко входу интегрирующего устройства, выход которого соединен со вторым входом суммирующего устройства.
2. Гироазимуткомпас по п.1, отличающийся тем, что блок внешнего источника информации с функцией датчика широты места судна выполнен в виде приемоиндикатора спутниковой навигационной системы GPS, подключенного к четвертому и пятому входам блока электронного.
3. Гироазимуткомпас по п.1, отличающийся тем, что усилитель выполнен с коэффициентом усиления К, установленным из соотношения
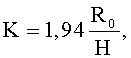
где величина 1,94 - скорость в узлах, соответствующая скорости 1 м/с, равна отношению количества секунд в часе к длине морской мили в метрах:
R0 - радиус Земли [м];
Н - кинетический момент гироскопа [Н·м·с].
| Способ определения поправки курса двухрежимного одногироскопного курсоуказателя | 1991 |
|
SU1838760A3 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 2001 |
|
RU2187074C1 |
| US 4458426 A, 10.07.1984. | |||

