Изобретение относится к области топогеодезии, в частности к способам решения типовых топогеодезических задач.
Известен «Учебник сержанта ракетных войск и артиллерии Сухопутных войск» для командиров топогеодезических отделений и топопривязчиков, книга 4, утвержденный командующим ракетными войсками и артиллерией Сухопутных войск, под редакцией В.В.Бурова (стр.127-185).
В учебнике изложены основные элементы (способ) решения типовых геодезических задач, принятый за прототип. При решении этих задач используются определенные математические зависимости, которые называют основными формулами геодезии (топографии). Содержание и объем полевых и вычислительных работ зависят от требований к результатам топогеодезической привязки, характера местности и расположения привязываемых точек относительно начальных (исходных) пунктов. Совокупность полевых измерений и вычислений (или графических построений), производимых в целях определения координат и дирекционных углов направлений, определяет способы топогеодезических работ. Работа на местности при любом способе топогеодезических работ заключается в измерении углов и расстояний. Обработка производится аналитически с помощью таблиц логарифмов, калькуляторов, счислителя СТМ или ЭВМ.
Недостатками прототипа являются:
- высокие временные затраты на проведение вычислений и, как следствие, низкая производительность;
- недостаточная точность полученных результатов при решении типовых задач;
- недостаточная номенклатура решаемых задач;
- низкая оперативность как при решении задач, так и при передаче полученных результатов заинтересованным потребителям;
- отсутствие возможности автоматизированного решения задач.
Предлагаемым изобретением решается задача по повышению точности и эффективности проведения топогедезических работ.
Технический результат, получаемый при осуществлении изобретения, заключается в формировании способа решения геодезических задач в составе топопривязчика, обеспечивающего автоматизированный режим выполнения математических расчетов для решения типовых геодезических задач и выдачи полученных результатов на устройство отображения информации и обладающего высокой степенью оперативности, высокой производительностью и расширенной номенклатурой решаемых задач, за счет введения в состав программных средств топопривязчика модуля поддержки решения типовых геодезических задач.
Указанный технический результат достигается тем, что в предлагаемом способе решения геодезических задач, включающем проведение полевых работ, заключающихся в измерении углов и расстояний, вычислительных работ, при выполнении которых используются основные формулы геодезии (топографии), и графических построений с дальнейшей аналитической обработкой данных с помощью ЭВМ, новым является то, что решение геодезических задач производится на базе бортовой ЭВМ мобильного комплекса навигации и топопривязки, в состав программных средств которой включен модуль поддержки для реализации решения этих задач по соответствующему алгоритму, обеспечивающий функционирование режима «СЕРВИСНЫЕ ЗАДАЧИ», в котором производится автоматизированное выполнение математических расчетов для решения следующих задач: преобразование полных прямоугольных координат из одной зоны в другую, прямая геодезическая задача, обратная геодезическая задача, расчет дирекционного угла светила для заданных моментов времени, расчет азимута по результатам наблюдения светила, прямая засечка ориентированным прибором, прямая засечка по измеренным углам, обратная засечка ориентированным прибором, обратная засечка по измеренным углам, обратная засечка по измеренным расстояниям, обратная засечка по измеренному углу и расстоянию, входные данные для решения задач определяются автоматически навигационной аппаратурой мобильного комплекса навигации и топопривязки, недостающие данные определяются при помощи выносного топогеодезического оборудования.
Выполнение решения геодезических задач на базе бортовой ЭВМ мобильного комплекса навигации и топопривязки позволяет:
- расширить функциональные возможности мобильного комплекса навигации и топопривязки при выполнении работ по топогеодезическому обеспечению войсковых подразделений;
- ускорить аналитическую обработку топогеодезических данных непосредственно в районе развертывания войсковых подразделений;
- максимально возможно автоматизировать технологический процесс проведения работ.
Включение в состав программных средств бортовой ЭВМ модуля поддержки для реализации решений геодезических задач по соответствующему алгоритму позволяет:
- обеспечить возможность решения необходимого количества геодезических задач;
- формировать пакет решаемых задач в зависимости от потребности, при необходимости изменяя состав.
Обеспечение функционирования режима «СЕРВИСНЫЕ ЗАДАЧИ», в котором производится автоматизированное выполнение математических расчетов для решения геодезических задач, позволяет:
- обеспечить удобство работы оператора мобильного комплекса;
- производить автоматическое выполнение математических расчетов для решения прикладных топогеодезических задач;
- расширить функциональные возможности системы навигации и топопривязки.
Определение входных данных для решения задач автоматически навигационной аппаратурой мобильного комплекса навигации и топопривязки позволяет:
- оперативно получать экипажу необходимые топогеодезические данные, не покидая расположение мобильного комплекса;
- повысить точность полученных параметров;
- ускорить процесс решения задач.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является новым и обладает изобретательским уровнем.
Сущность изобретения поясняется чертежами, где на фиг.1 показано основное меню режима «Сервисные задачи»; на фиг.2 - окно задачи «Преобразование полных прямоугольных координат из одной зоны в другую»; на фиг.3 - окно подзадачи «Прямая геодезическая задача»; на фиг.4 - окно подзадачи «Обратная геодезическая задача»; на фиг.5 - окно подзадачи «Расчет дирекционного угла светила для заданных моментов времени»; на фиг.6 - окно подзадачи «Расчет азимута по результатам наблюдения светила»; на фиг.7 - окно подзадач «Прямая засечка ориентированным прибором» и «Прямая засечка по измеренным углам»; на фиг.8 - окно подзадач «Обратная засечка ориентированным прибором» и «Обратная засечка по измеренным углам»; на фиг.9 - окно подзадачи «Обратная засечка по измеренным углам»; на фиг.10 - окно подзадачи «Обратная засечка по измеренным расстояниям»; на фиг.11 - схема алгоритма решения прямой геодезической задачи; на фиг.12 - таблица наименований и обозначений данных для решения прямой геодезической задачи; на фиг.13 - контрольный пример решения прямой геодезической задачи; на фиг.14 - схема алгоритма решения обратной геодезической задачи; на фиг.15 - таблица наименований и обозначений данных для решения обратной геодезической задачи; на фиг.16 - контрольный пример решения обратной геодезической задачи.
Способ решения геодезических задач реализуется следующим образом. Для повышения оперативности, производительности и расширения номенклатуры топогеодезических работ, выполняемых с помощью мобильного комплекса навигации и топопривязки, в бортовой ЭВМ устанавливается программно-математическое обеспечение, в которое включен модуль поддержки для реализации решения типовых геодезических задач. Входные данные для решения задач определяются автоматически навигационной аппаратурой мобильного комплекса навигации и топопривязки, которая включает в себя автономную аппаратуру навигации и топопривязки, аппаратуру спутниковой навигации, механический и доплеровский датчики скорости, систему определения высоты. С помощью навигационной аппаратуры определяются следующие данные: координаты исходного пункта, текущие координаты и дирекционный угол продольной оси мобильного комплекса. Кроме того, члены экипажа могут, не покидая расположения мобильного комплекса, с помощью оптического визира определять дальности и углы на ориентиры. При необходимости недостающие данные определяются при помощи выносного топогеодезического оборудования: гирокомпаса, буссоли и теодолита.
При включении бортовой ЭВМ происходит автоматический запуск специального программно-математического обеспечения и режима определения дирекционного угла. После загрузки операционной системы на монитор выводится рабочее окно. В верхней части рабочего окна индицируются возможные режимы работы. Управление режимами работы системы осуществляется оператором, который выбирает требуемый режим. При этом выводится список задач выбранного режима.
Алгоритм выполнения оператором действий в режиме «СЕРВИСНЫЕ ЗАДАЧИ» выглядит следующим образом.
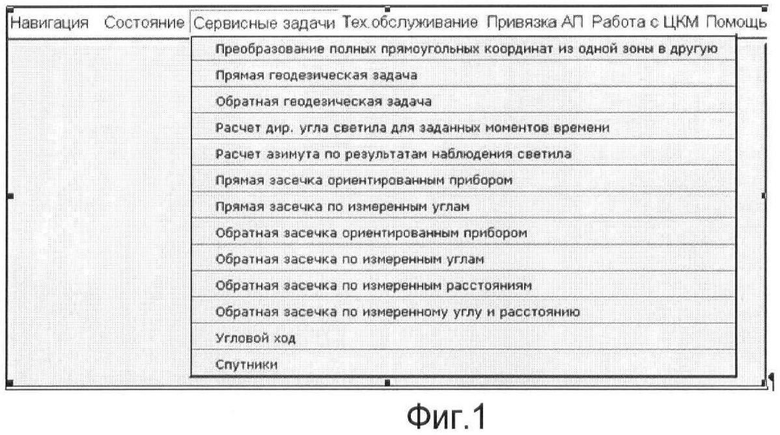
1. После активации режима «СЕРВИСНЫЕ ЗАДАЧИ» на мониторе появляется меню задач (см. фиг.1). Решается та задача, которую необходимо реализовать на данный момент.
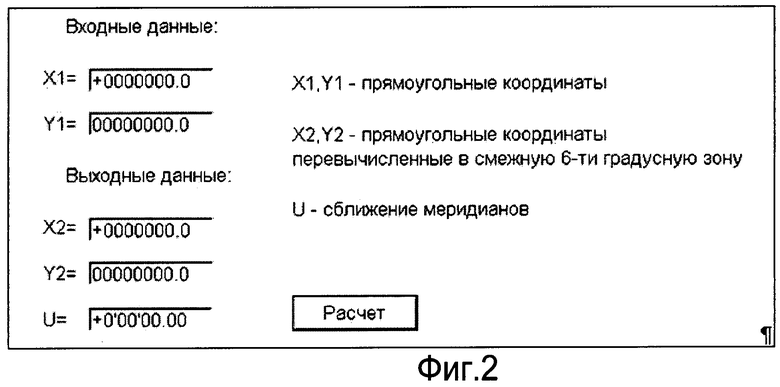
2. Выбирается из меню задача "Преобразование полных прямоугольных координат из одной зоны в другую", на мониторе появляется окно (см. фиг.2).
Вводятся входные данные Х1, Y1 - прямоугольные координаты. После нажатия кнопки «Расчет» на мониторе появятся значения прямоугольных координат Х2, Y2, перевычисленные в смежную шестиградусную зону сближения меридианов U.
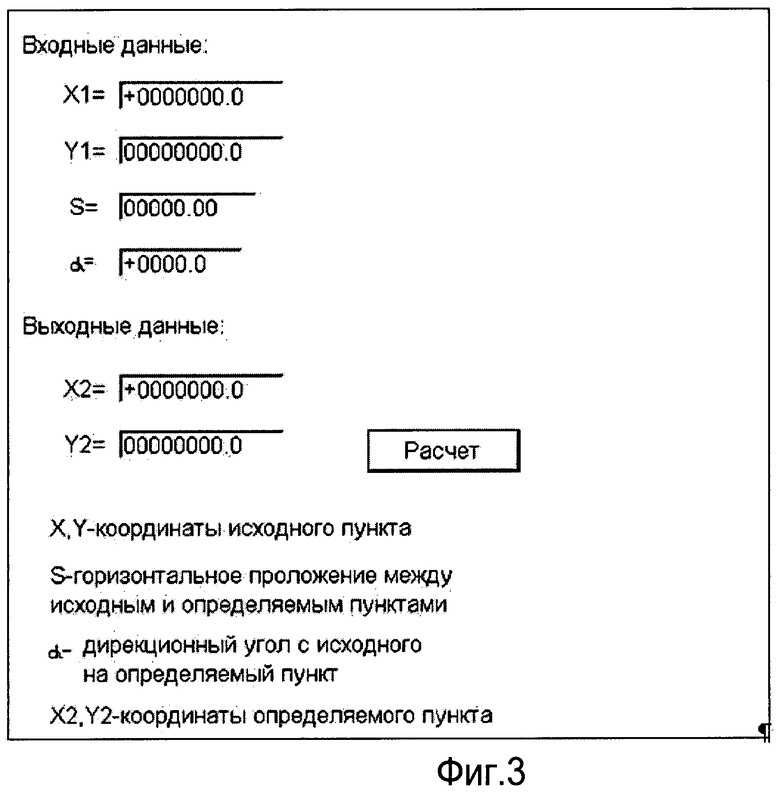
3. Выбирается из меню задача «Прямая геодезическая задача», на мониторе появляется окно (см. фиг.3).
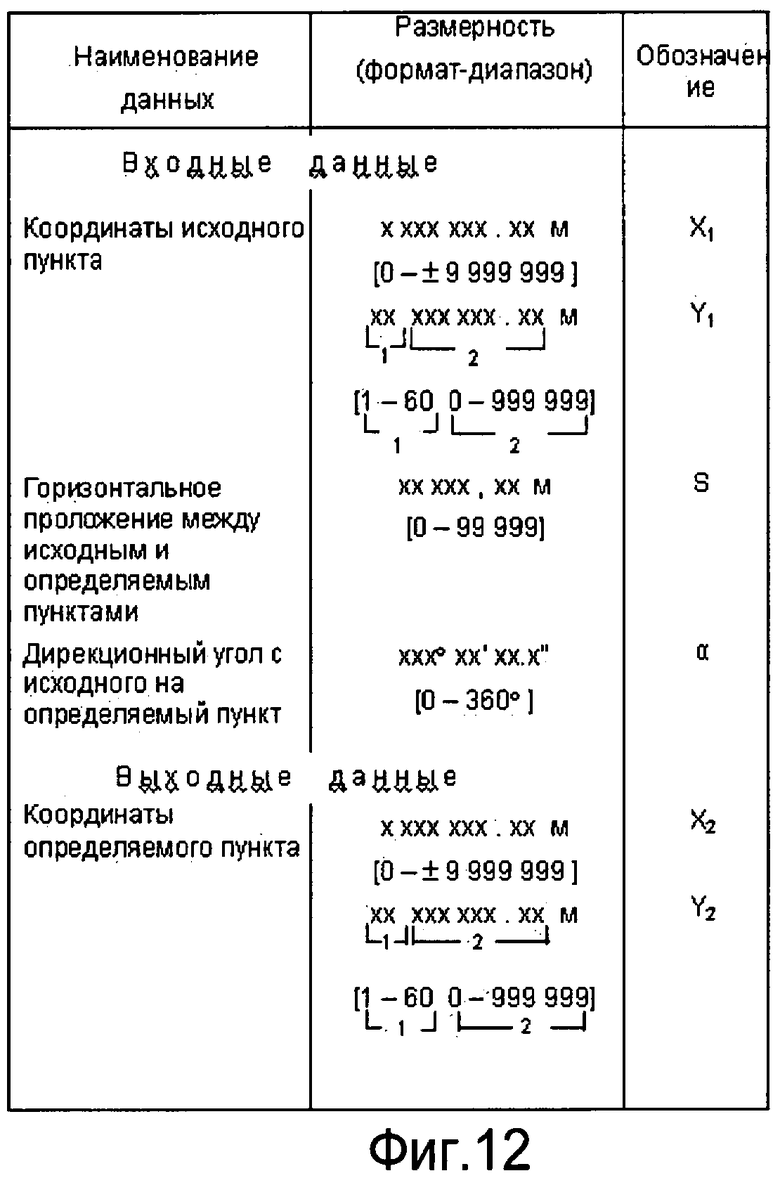
Вводятся входные данные Х1, Y1 - координаты исходного пункта, S - горизонтальное проложение между исходным и определяемым пунктами, α - дирекционный угол с исходного на определяемый пункт. После нажатия кнопки «Расчет» на мониторе появляется значение координат определяемого пункта Х2, Y2.
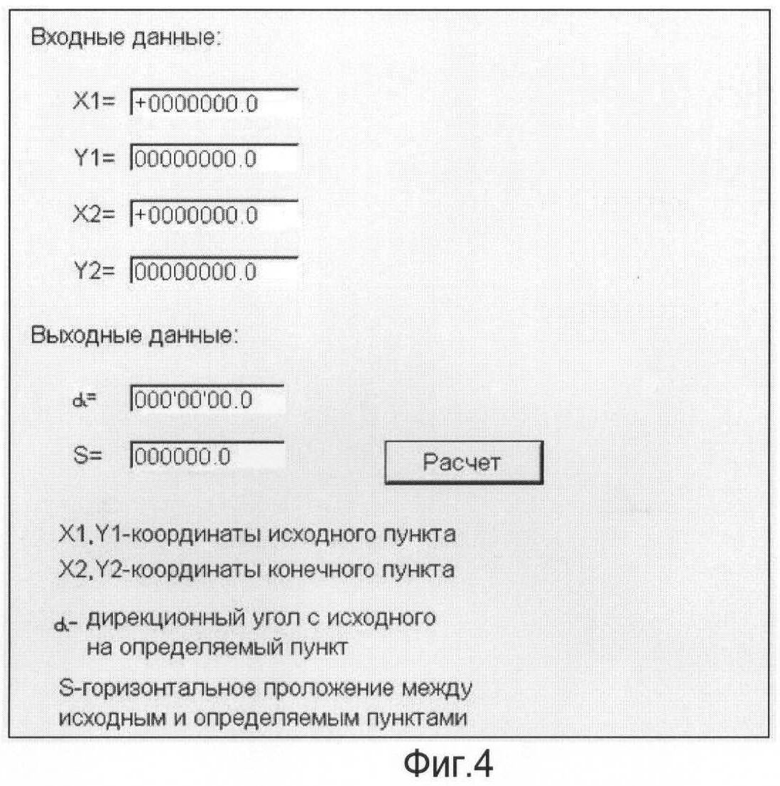
4. Выбирается из меню задача «Обратная геодезическая задача», на мониторе появляется окно (см. фиг.4).
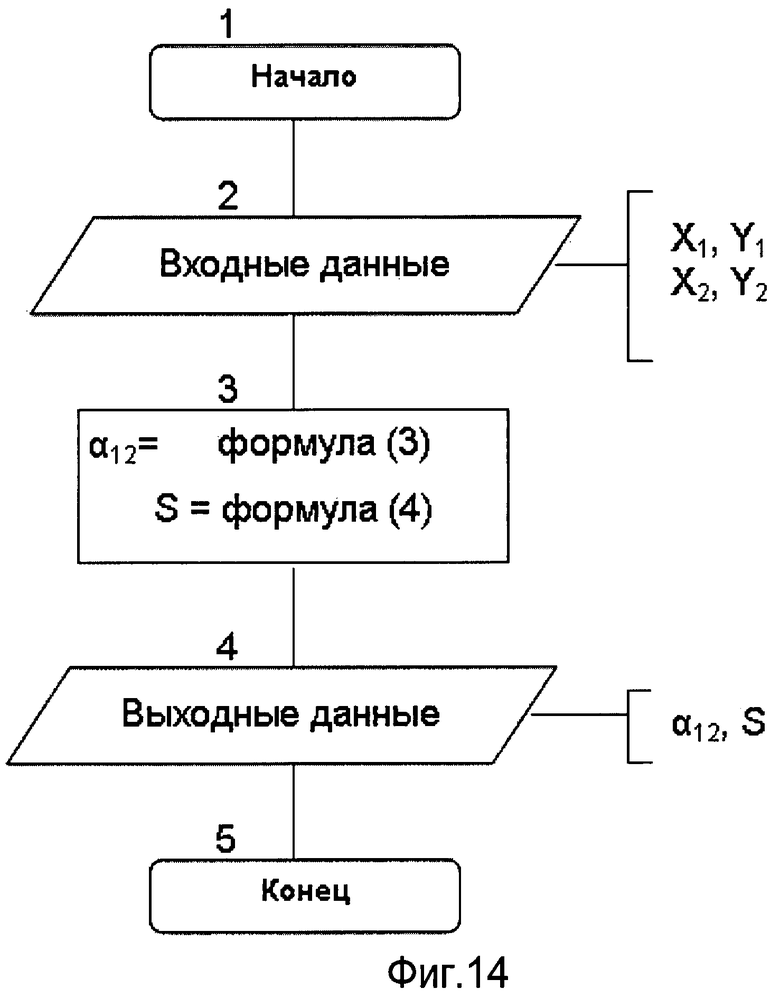
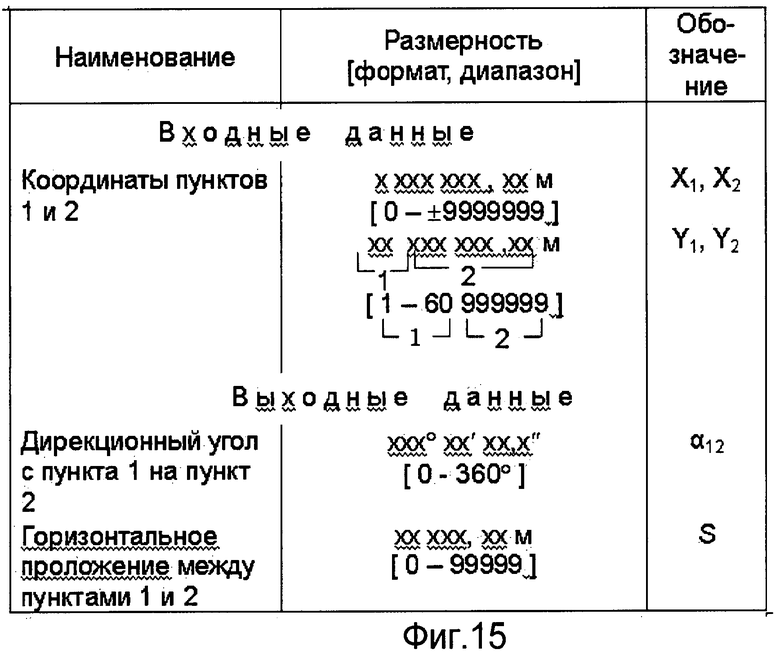
Вводятся входные данные Х1, Y1 - координаты исходного пункта, Х2, Y2 - координаты конечного пункта. После нажатия кнопки «Расчет» на мониторе появляются значения дирекционного угла α, горизонтального проложения S между пунктами 1 и 2.
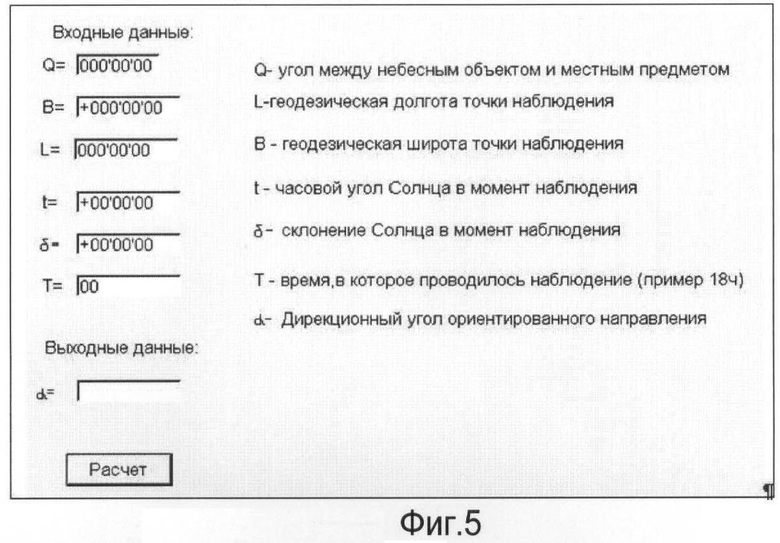
5. Выбирается из меню задача «Расчет дир. угла светила для заданных моментов времени», на мониторе появляется окно (см. фиг.5).
Вводятся входные данные Q - угол между небесным объектом и местным предметом, L - геодезическая долгота точки наблюдения, В - геодезическая широта точки наблюдения, t - часовой угол Солнца в момент наблюдения, δ - склонение Солнца в момент наблюдения, Т - время, в которое проводилось наблюдение. После нажатия кнопки «Расчет» на мониторе появляется значение дирекционного угла, ориентированного направления α.
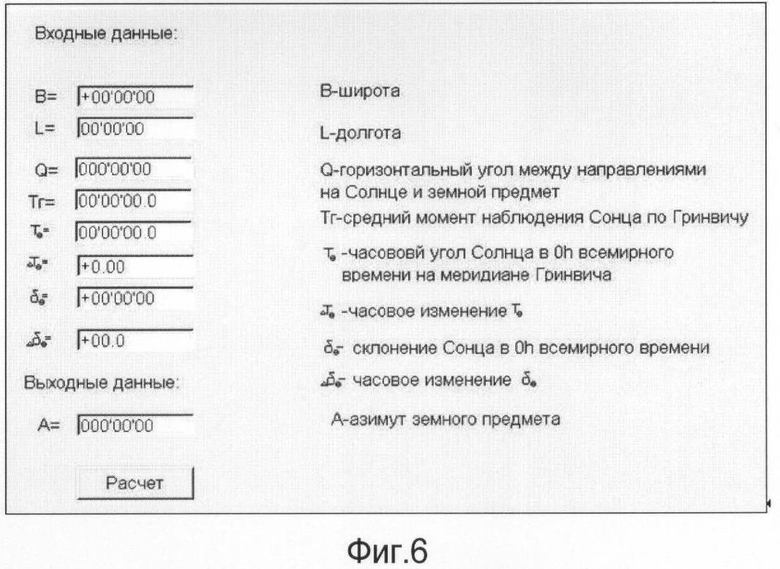
6. Выбирается из меню задача «Расчет азимута по результатам наблюдения светила», на мониторе появляется окно (см. фиг.6).
Вводятся входные данные В - широта, L - долгота, Q - горизонтальный угол между направлением на Солнце и земной предмет, Тг - средний момент наблюдения Солнца по Гринвичу, Тo - часовой угол Солнца в 0h всемирного времени на меридиане Гринвича, ΔТo - часовое изменение Тo, δo - склонение Солнца в 0h всемирного времени, Δδo - часовое изменение δo. После нажатия кнопки «Расчет» на мониторе появляется значение азимута земного предмета А.
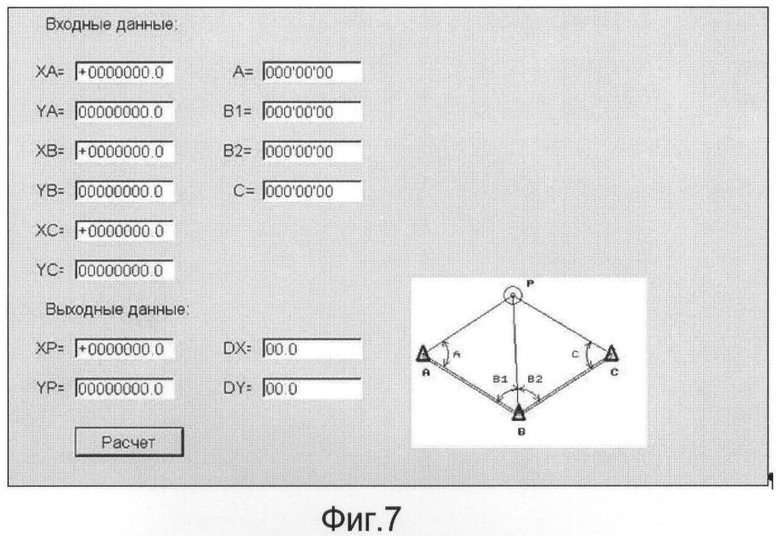
7. Выбирается из меню задача «Прямая засечка ориентированным прибором», на мониторе появляется окно (см. фиг.7).
Вводятся входные данные. После нажатия кнопки «Расчет» на мониторе появляются значения координат определяемого пункта ХР, YP, значения расхождений координат определяемого пункта из двух треугольников DX, DY.
8. Выбирается из меню задача «Прямая засечка по измеренным углам», на мониторе появляется окно (см. фиг.7).
Вводятся входные данные. После нажатия кнопки «Расчет» на мониторе появляются значения координат определяемого пункта ХР, YP, значения расхождений координат определяемого пункта из двух треугольников DX, DY.
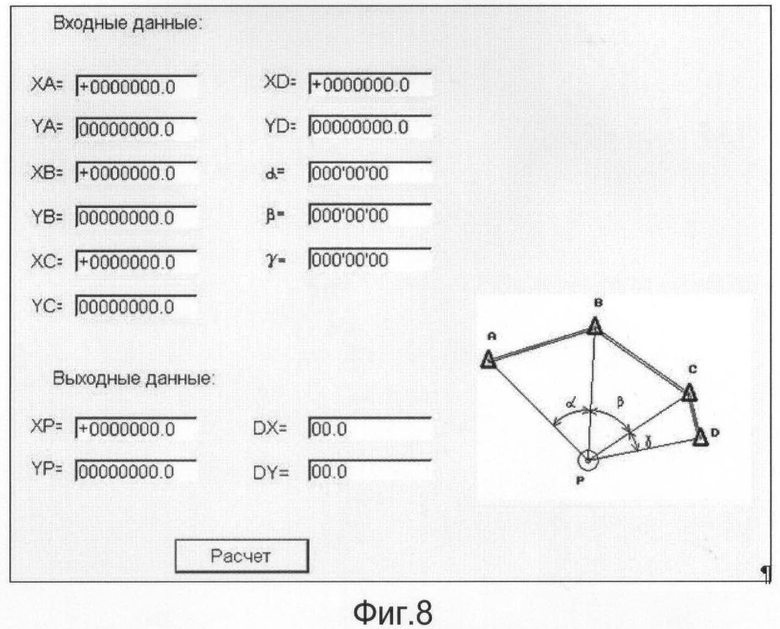
9. Выбирается из меню задача «Обратная засечка ориентированным прибором», на мониторе появляется окно (см. фиг.8).
Вводятся входные данные. После нажатия кнопки «Расчет» на мониторе появляются значения координат определяемого пункта ХР, YP, значения расхождений координат определяемого пункта, полученных из двух разных пар треугольников DX, DY.
10. Выбирается из меню задача «Обратная засечка по измеренным углам», на мониторе появляется окно (см. фиг.8).
Вводятся входные данные. После нажатия кнопки «Расчет» на мониторе появляются значения координат определяемого пункта ХР, YP, значения расхождений координат определяемого пункта, полученных из двух разных пар треугольников DX, DY.
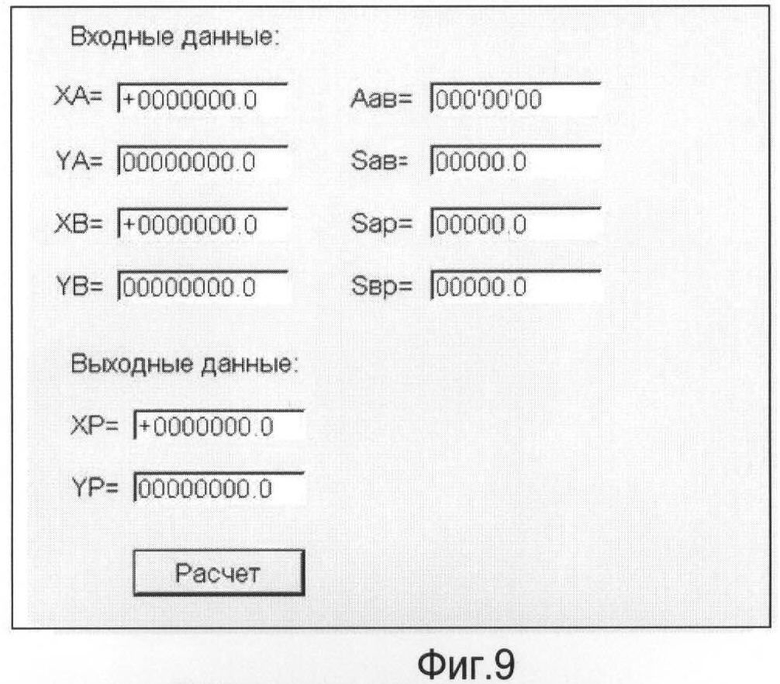
11. Выбирается из меню задача «Обратная засечка по измеренным расстояниям», на мониторе появляется окно (см. фиг.9).
Вводятся входные данные. После нажатия кнопки «Расчет» на мониторе появятся значения координат определяемого пункта ХР, YP.
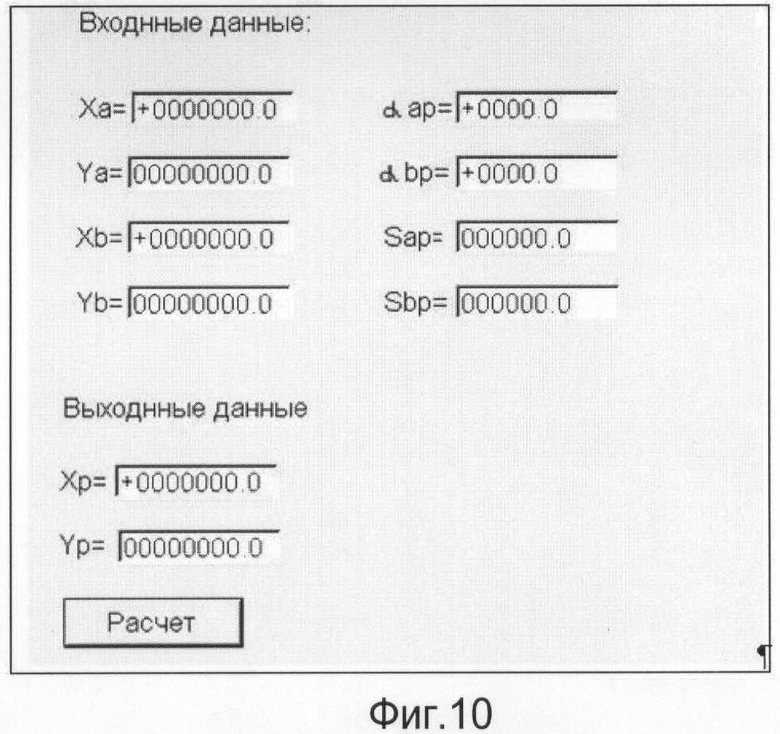
12. Выбирается из меню задача «Обратная засечка по измеренному углу и расстоянию», на мониторе появляется окно (см. фиг.10).
Вводятся входные данные. После нажатия кнопки «Расчет» на мониторе появятся значения координат определяемого пункта ХР, YP.
Реализация решения геодезических задач происходит по соответствующему алгоритму. В качестве примера будут рассмотрены алгоритмы решения следующих задач: «Прямая геодезическая задача», «Обратная геодезическая задача».
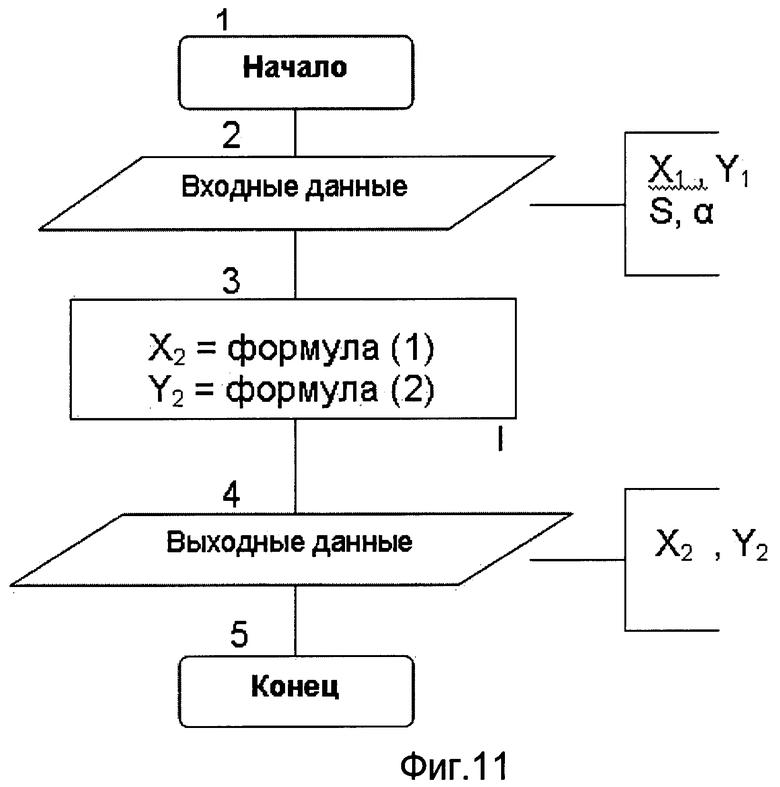
«Прямая геодезическая задача»
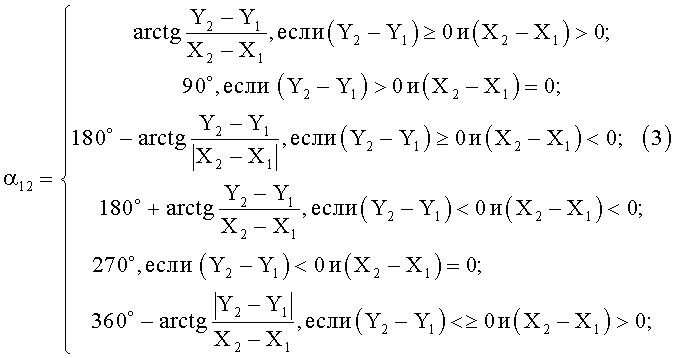
1. Формулы вычисления представлены в виде:


2. Схема алгоритма представлена на фиг.11.
3. Наименование и обозначение данных приведено в таблице (см. фиг.12).
4. На фиг.13 приведен контрольный пример решения «Прямой геодезической задачи».
«Обратная геодезическая задача»
1. Формулы вычисления представлены в виде:
- вычисление дирекционного угла с пункта 1 на пункт 2
- вычисление горизонтального проложения между пунктами 1 и 2

2. Схема алгоритма представлена на фиг.14.
3. Наименование и обозначение данных приведено в таблице (см. фиг.15).
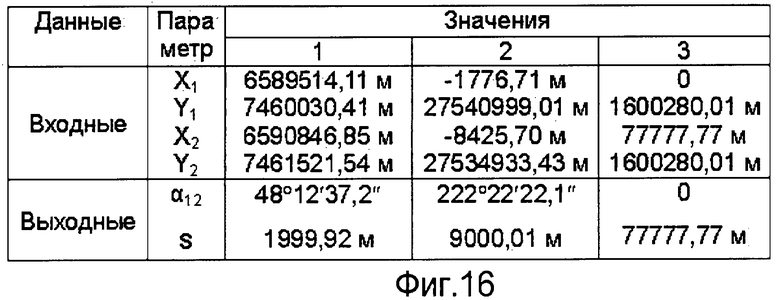
4. На фиг.16 приведен контрольный пример решения «Обратной геодезической задачи».
Таким образом, в предлагаемом изобретении решена задача по достижению технического результата, заключающегося в формировании способа решения геодезических задач в составе топопривязчика, обеспечивающего автоматизированный режим выполнения математических расчетов для решения типовых геодезических задач и выдачи полученных результатов на устройство отображения информации и обладающего высокой степенью оперативности, высокой производительностью и расширенной номенклатурой решаемых задач, за счет введения в состав программных средств топопривязчика модуля поддержки решения типовых геодезических задач.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2481204C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| ТОПОПРИВЯЗЧИК | 2015 |
|
RU2591113C1 |
| СПОСОБ СОЗДАНИЯ ТОПОГЕОДЕЗИЧЕСКИХ СЕТЕЙ ДЛЯ ПОДГОТОВКИ БОЕВЫХ ДЕЙСТВИЙ РАКЕТНЫХ ВОЙСК, АРТИЛЛЕРИИ И ПРОТИВОВОЗДУШНОЙ ОБОРОНЫ СУХОПУТНЫХ ВОЙСК | 2014 |
|
RU2581109C9 |
| КОМПЛЕКТ ВЫНОСНОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2480714C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В СОСТАВЕ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВОЙСКАМИ | 2012 |
|
RU2511207C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2439497C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ТОПОПРИВЯЗКИ И НАВИГАЦИИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2012 |
|
RU2498221C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ГЕОДЕЗИЧЕСКИХ ДАННЫХ С ПОМОЩЬЮ УНИВЕРСАЛЬНОГО ТОПОПРИВЯЗЧИКА (УТП) | 2010 |
|
RU2440558C1 |

Изобретение относится к области топогеодезии, в частности к способам решения типовых топогеодезических задач. Технический результат заключается в создании способа решения геодезических задач в составе топопривязчика. Способ решения геодезических задач включает проведение полевых работ, заключающихся в измерении углов и расстояний, вычислительных работ, при выполнении которых используются основные формулы геодезии (топографии), и графических построений с дальнейшей аналитической обработкой данных с помощью ЭВМ, причем решение геодезических задач производится на базе бортовой ЭВМ мобильного комплекса навигации и топопривязки, в состав программных средств которой включен модуль поддержки для реализации решения этих задач по соответствующему алгоритму, обеспечивающий функционирование режима «СЕРВИСНЫЕ ЗАДАЧИ», в котором производится автоматизированное выполнение математических расчетов для решения следующих задач: преобразование полных прямоугольных координат из одной зоны в другую, прямая геодезическая задача, обратная геодезическая задача, расчет дирекционного угла светила для заданных моментов времени, расчет азимута по результатам наблюдения светила, прямая засечка ориентированным прибором, прямая засечка по измеренным углам, обратная засечка ориентированным прибором, обратная засечка по измеренным углам, обратная засечка по измеренным расстояниям, обратная засечка по измеренному углу и расстоянию, входные данные для решения задач определяются автоматически навигационной аппаратурой мобильного комплекса навигации и топопривязки, недостающие данные определяются при помощи выносного топогеодезического оборудования. 16 ил.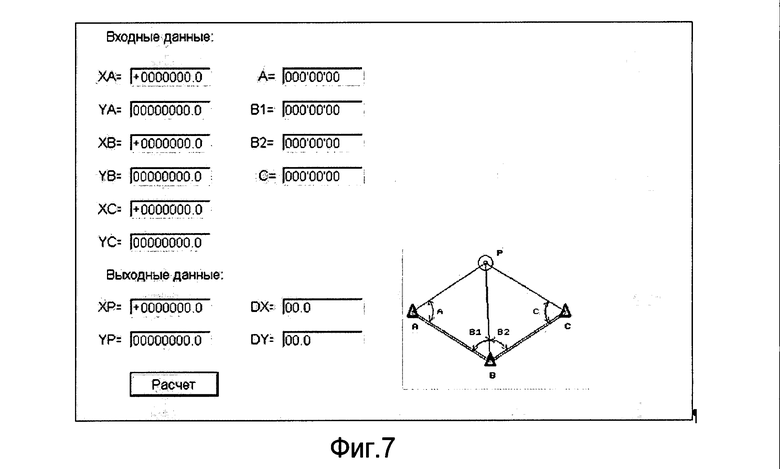
Способ решения геодезических задач, включающий проведение полевых работ, заключающихся в измерении углов и расстояний, вычислительных работ, при выполнении которых используются основные формулы геодезии (топографии), и графических построений с дальнейшей аналитической обработкой данных с помощью ЭВМ, отличающийся тем, что решение геодезических задач производится на базе бортовой ЭВМ мобильного комплекса навигации и топопривязки, в состав программных средств которой включен модуль поддержки для реализации решения этих задач по соответствующему алгоритму, обеспечивающий функционирование режима «СЕРВИСНЫЕ ЗАДАЧИ», в котором производится автоматизированное выполнение математических расчетов для решения следующих задач: преобразование полных прямоугольных координат из одной зоны в другую, прямая геодезическая задача, обратная геодезическая задача, расчет дирекционного угла светила для заданных моментов времени, расчет азимута по результатам наблюдения светила, прямая засечка ориентированным прибором, прямая засечка по измеренным углам, обратная засечка ориентированным прибором, обратная засечка по измеренным углам, обратная засечка по измеренным расстояниям, обратная засечка по измеренному углу и расстоянию, входные данные для решения задач определяются автоматически навигационной аппаратурой мобильного комплекса навигации и топопривязки, недостающие данные определяются при помощи выносного топогеодезического оборудования.
| УНИВЕРСАЛЬНЫЙ ТОПОПРИВЯЗЧИК (УТП) НА БАЗЕ ЛЕГКОВОГО ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2009 |
|
RU2413637C1 |
| АППАРАТУРА СЧИСЛЕНИЯ КООРДИНАТ ШИРОКОГО ПРИМЕНЕНИЯ | 2001 |
|
RU2193755C1 |
| МОДУЛЬ ПЛАНИРОВАНИЯ | 2009 |
|
RU2415456C1 |
| US 6862526 B2, 01.03.2005 | |||
| Способ получения модифицированного цис-1,4-полиизопрена полимеризацией изопрена | 1978 |
|
SU866983A1 |

