Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного, наземного и морского пространства с использованием прямых и рассеянных подвижными объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Достижение высокой эффективности обнаружения, локализации и идентификации подвижных объектов ограничивается существенной априорной неопределенностью размеров, ориентации в пространстве, отражающих свойств и параметров движения объектов, а также несовершенством известных способов скрытного обнаружения и слежения за подвижными объектами.
Технология скрытного обнаружения и слежения за объектами, использующая естественный радиоподсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения в диапазонах коротких, метровых, дециметровых и сантиметровых волн: широковещательные (коммерческое FM-радиовещание, телевидение высокой четкости), информационные (связь) и измерительные (управление, навигация), пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Известен способ скрытного обнаружения подвижных объектов [1], заключающийся в том, что принимают двумя пространственно совмещенными приемными каналами прямой радиосигнал от передатчика подсвета и рассеянный от объекта радиосигнал, синхронно преобразуют принятые радиосигналы в комплексные цифровые сигналы, которые синхронно регистрируют на заданном временном интервале, из комплексных цифровых сигналов формируют сигнал комплексной взаимной корреляционной функции, зависящей от частотного сдвига принятых сигналов, исключают центральную часть комплексной взаимной корреляционной функции и получают сигнал модифицированной комплексной взаимной корреляционной функции, преобразуют сигнал модифицированной комплексной взаимной корреляционной функции в модифицированный рассеянный комплексный цифровой сигнал, формируют сигнал зависящей от временного и частотного сдвигов комплексной двумерной взаимной корреляционной функции между модифицированным рассеянным комплексным цифровым сигналом и прямым комплексным цифровым сигналом, из сигнала комплексной двумерной взаимной корреляционной функции выделяют сжатые рассеянные сигналы и определяют их параметры, которые используют для обнаружения и пространственной локализации объектов.
Данный способ включает операции компенсации когерентных помех, возникающих за счет просачивания прямого радиосигнала передатчика подсвета в канал приема рассеянных объектами радиосигналов. При этом осуществляется сжатие спектра мощного прямого радиосигнала и его последующая режекция в частотной области, чем обеспечивается повышение отношения сигнал/помеха принятого слабого рассеянного радиосигнала. Однако такая одномерная режекция удаляет все рассеянные радиосигналы с малыми значениями доплеровского сдвига частоты на всех возможных дальностях обнаружения, что приводит к невозможности обнаружения объектов с малой радиальной скоростью. Таким образом, недостатком данного способа является невозможность обнаружения объектов с малой радиальной скоростью.
Более эффективным является способ скрытного обнаружения подвижных объектов [2], свободный от этого недостатка и выбранный в качестве прототипа. Согласно этому способу:
когерентно принимают двумя пространственно совмещенными приемными каналами прямой радиосигнал от передатчика подсвета и рассеянный воздушными объектами разведываемый радиосигнал,
синхронно преобразуют зависящие от времени прямой и разведываемый радиосигналы в комплексные цифровые сигналы,
синхронно регистрируют цифровой прямой сигнал s' и цифровой разведываемый сигнал s,
из комплексных цифровых сигналов s' и s формируют сигнал зависящей от временного и частотного сдвигов комплексной двухмерной взаимной корреляционной функции (ДВКФ),
исключают центральную часть комплексной ДВКФ и получают сигнал модифицированной комплексной ДВКФ,
из сигнала модифицированной комплексной ДВКФ и прямого комплексного цифрового сигнала формируют модифицированный рассеянный комплексный цифровой сигнал,
формируют результирующий сигнал комплексной ДВКФ между модифицированным рассеянным комплексным цифровым сигналом и прямым комплексным цифровым сигналом,
по модулю результирующего сигнала комплексной ДВКФ определяют число сжатых рассеянных сигналов, по параметрам которых - значению задержки по времени, абсолютного доплеровского сдвига каждого сжатого рассеянного сигнала и значению азимутально-угломестного направления приема рассеянных сигналов - выполняют обнаружение и пространственную локализацию воздушных объектов.
Способ-прототип включает операции двумерной корреляционной фильтрации принятых сигналов, основанные на формировании классической двумерной взаимной корреляционной функции, которая, кроме основного лепестка, содержит высокие боковые лепестки, маскирующие сигналы далеких и слабо рассеивающих объектов.
Таким образом, недостатком способа-прототипа является низкая вероятность обнаружения далеких и слабо рассеивающих объектов.
Техническим результатом изобретения является повышение вероятности обнаружения далеких и слабо рассеивающих объектов.
Повышение вероятности обнаружения далеких и слабо рассеивающих объектов достигается за счет
применения новых операций адаптивной обработки с обратной связью по полезному радиосигналу, обеспечивающих повышение чувствительности и динамического диапазона формирования частотно-временного изображения радиосигналов, рассеянных объектами;
применения новых операций нелинейной обработки, обеспечивающих повышение разрешающей способности формирования изображения.
Технический результат достигается тем, что в способе скрытного обнаружения подвижных объектов, заключающемся в том, что когерентно принимают двумя пространственно совмещенными приемными каналами прямой радиосигнал от передатчика подсвета и рассеянный воздушными объектами разведываемый радиосигнал, синхронно преобразуют зависящие от времени прямой и разведываемый радиосигналы в комплексные цифровые сигналы, синхронно регистрируют цифровой прямой сигнал s' и цифровой разведываемый сигнал s, согласно изобретению преобразуют цифровой прямой сигнал s' в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом, запоминают матричный сигнал A, преобразуют цифровой разведываемый сигнал s в сигнал комплексного частотно-временного изображения h(0)=(AHA)-1AHs, где AH - матрица, эрмитово сопряженная с A, сигнал запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал 


Операции способа поясняются чертежами:
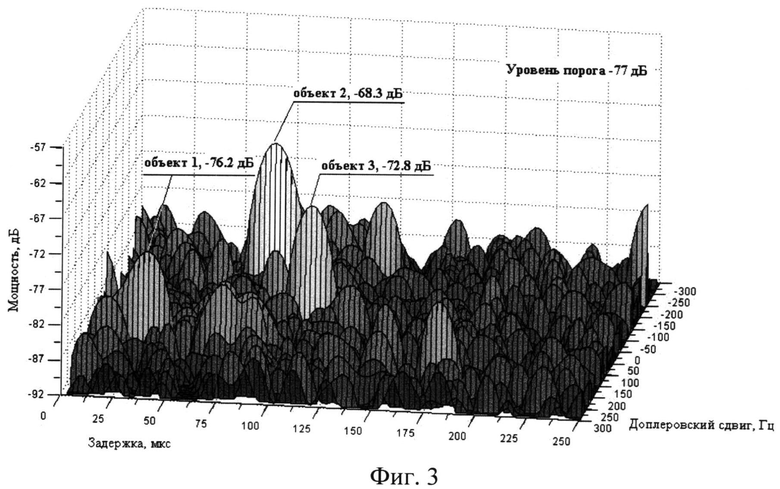
фиг.1 - структурная схема устройства скрытного обнаружения подвижных объектов;
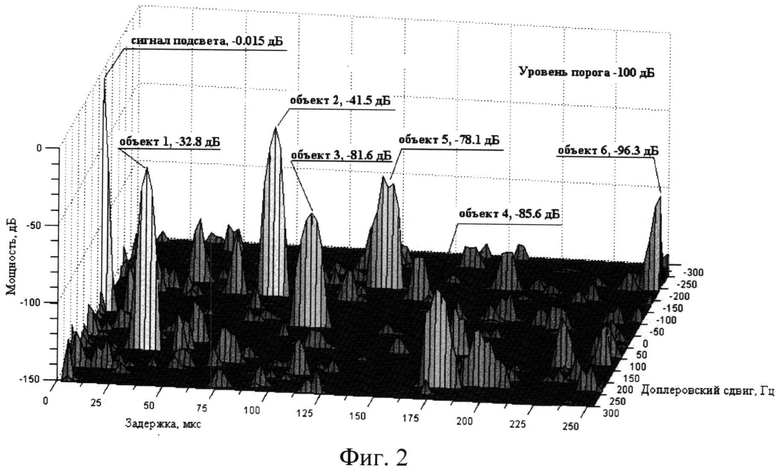
фиг.2 - результаты моделирования процесса скрытного обнаружения подвижных объектов предложенным способом;
фиг.3 - результаты моделирования процесса скрытного обнаружения подвижных объектов при использовании способа-прототипа.
Способ скрытного обнаружения подвижных объектов осуществляется следующим образом:
1. Когерентно принимают двумя пространственно совмещенными приемными каналами прямой радиосигнал s'(t) от передатчика подсвета и рассеянный воздушными объектами разведываемый радиосигнал s(t).
2. Синхронно преобразуют зависящие от времени t прямой s'(t) и разведываемый s(t) радиосигналы в комплексные цифровые сигналы 
3. Синхронно регистрируют цифровой прямой сигнал s' и цифровой разведываемый сигнал s.
4. Преобразуют цифровой прямой сигнал s' в матричный сигнал комплексной фазирующей функции А, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом. Запоминают сигнал А.
Преобразование прямого сигнала s' в матричный сигнал А осуществляют по следующей формуле: 

- матрицы доплеровских сдвигов, ℓ=0,…,±L, L - размер координатной сетки по доплеровскому сдвигу. Размеры матриц Dℓ и D соответственно равны Z×Z и Z×Z(2L+1).
Таким образом, столбцы матрицы A представляют собой задержанные по времени и сдвинутые по частоте доплеровского сдвига версии прямого сигнала s', а размер этой матрицы Z×J(2L+1), определяется числом отсчетов в разведываемом сигнале (длительностью интервала наблюдения) и размерами координатной сетки по временному запаздыванию и доплеровскому сдвигу частоты.
5. Преобразуют цифровой разведываемый сигнал s в сигнал комплексного частотно-временного изображения h(0)=(AHA)-1 AHs, где AH - матрица, эрмитово сопряженная с A.
При этом выполняют следующие действия:
- преобразуют сигнал фазирующей функции A в эрмитово сопряженный сигнал 

- умножая сигнал

- обращая матрицу полученного сигнала AHA, формируют и запоминают сигнал (AHA)-1;
- умножая сигнал
- умножая сигнал (AHA)-1 на сигнал AHs, получают сигнал частотно-временного изображения h(0)=(AHA)-1AHs.
Если величину (AHA)-1 рассматривать как нормировку, то синтезированное начальное приближение комплексного частотно-временного изображения h(0)=(AHA)-1AHs совпадает с частотно-временным изображением, получаемым на основе классической взаимной корреляционной функции h(0)≈AHs [2]. Отсюда следует, что начальное приближение частотно-временного изображения h(0)(AHA)-1AHs не обладает повышенной разрешающей способностью.
Сигнал h(0) запоминают и используют в качестве начального приближения комплексного частотно-временного изображения.
Описанные операции могут рассматриваться как нулевая итерация синтеза сигнала комплексного частотно-временного изображения. После ее выполнения начинается рабочий цикл последовательных {k=1,2,…) итераций синтеза.
6. Итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал (в форме диагональной матрицы)

При этом выполняют следующие действия:
- формируют сигналы модулей 
При восстановлении сигналов модулей
- возводя полученное приближение сигналов модулей
Таким образом, на первой (k=1) и последующих (k=2,3,…) итерациях вспомогательный сигнал Л(h(k-1)) выражается через сигнал частотно-временного изображения h(k-1), полученный на предыдущей итерации;
- используя полученный вспомогательный сигнал Л(h(k-1)) и запомненные сигналы AHA и AHs, формируют взвешивающий сигнал [AHA+λЛ(h(k-1))]-1 и зависящий от предыдущего решения сигнал очередного приближения частотно-временного изображения h(k)[AHA+λЛ(h(k-1))]-1AHs, который запоминают для использования на очередной итерации. Значение множителя Лагранжа λ выбирают исходя из уровня шумов в каналах приема;
- сравнивают энергию разности частотно-временных изображений 

- при не выполнении условия 
При выполнении условия 

Таким образом, учитывая, что сигнал Л(h(k-1)) выражается через полученный на предыдущей итерации сигнал частотно-временного изображения h(k-1), сигнал текущего комплексного частотно-временного изображения h(k) также зависит от предыдущего решения h(k-1). В связи с этим предложенный способ реализует адаптацию с обратной связью по полезному сигналу.
Кроме того, учитывая, что сигнал Л(h(k-1)) зависит от модуля в степени (-1) частотно-временного изображения h(k-1), при формировании сигнала Л(h(k-1)) и, следовательно, сигнала h(k), компоненты полезного сигнала усиливаются. Эта особенность, характерная для нелинейной обработки, лежит в основе повышения разрешающей способности синтеза.
Для оценки сравнительной эффективности предложенного способа выполнено моделирование на ПЭВМ.
Моделирование выполнялось с использованием полунатурных данных, построенных на основе измеренного сигнала звукового сопровождения аналогового телевидения на частоте 229.75 МГц, который играл роль опорного сигнала. К нему добавлялся белый шум с нормальным распределением. Соотношение сигнал/шум составляло 30 дБ. Он же с добавкой уменьшенных по амплитуде, задержанных по времени и сдвинутых по Доплеру компонент того же опорного сигнала использовался в качестве разведываемых сигналов с параметрами, приведенными в таблице.
При моделировании значение множителя Лагранжа полагалось равным λ=0.0011, а число итераций, как правило, не превышало 10.
На фиг.2 и фиг.3 представлены частотно-временные изображения рассеянных объектами радиосигналов, сформированные предложенным способом и способом-прототипом соответственно.
Из сравнения этих изображений следует, что предложенный способ обеспечивает обнаружение всех шести объектов. В то же время способ-прототип обеспечивает обнаружение только трех объектов с высокими уровнями рассеянных радиосигналов, то есть близко расположенных или сильно рассеивающих объектов.
Рассмотрим работу устройства, реализующего предложенный способ скрытного обнаружения подвижных объектов.
Устройство, реализующего предложенный способ содержит последовательно соединенные систему приема и предварительной обработки 1, систему моделирования и выбора радиопередатчиков (РПД) 2, вычислительную систему 3 и блок управления и индикации 4.
В свою очередь система 1 включает канал приема прямого радиосигнала, содержащий антенную систему (АС) 1-1, преобразователь частоты 1-2, аналогово-цифровой преобразователь (АЦП) 1-3, а также канал приема рассеянных радиосигналов, включающий АЦП 1-4, преобразователь частоты 1-5 и АС 1-6.
Вычислительная система 3 включает блок синтеза частотно-временного изображения 3-1, блок сравнения 3-2, устройство формирования вспомогательного сигнала 3-3 и блок формирования сигнала фазирующей функции 3-4.
При этом система 2 соединена с входом блока 4, а также имеет интерфейс для соединения с внешней базой РПД. Кроме того, блок 4 имеет выход, предназначенный для подключения к внешним системам.
Подсистема 1 является аналогово-цифровым устройством и предназначена для приема прямых радиосигналов с применением направленной AC 1-1 и для приема рассеянных объектами радиосигналов с применением направленной АС 1-2, а также для преобразования принятых радиосигналов в комплексные цифровые сигналы.
Отметим, что после того как параметры синхронизации прямого радиосигнала выбранного передатчика подсвета измерены или когда они априорно известны, прямой радиосигнал передатчика может быть сформирован путем моделирования в системе 2.
Преобразователи частоты 1-2 и 1-5 выполнены с общим гетеродином и с полосой пропускания каждого канала, изменяемой в соответствии с шириной спектра принимаемого радиосигнала. Общий гетеродин обеспечивает двухканальный когерентный прием сигналов. АЦП 1-3 и АЦП 1-6 также синхронизированы сигналом одного опорного генератора (для упрощения гетеродин и опорный генератор на схеме не показаны).
Подсистема 2 является вычислительным устройством и предназначена для идентификации, отбора и периодического обновления передатчиков радиосигналов с расширенным спектром, используемых для подсвета заданной области контролируемого пространства, а также для формирования модельных сигналов выбранных радиопередатчиков.
Вычислительная система 3 предназначена для формирования сигнала фазирующей функции (блок 3-4), формирования вспомогательного и взвешивающего сигналов (устройство 3-3), сравнения сигналов частотно-временных изображений, формируемых на смежных итерациях (блок 3-2).
Устройство работает следующим образом.
В системе 2 на основе данных внешней базы радиопередатчиков подсвета с использованием программных средств моделирования идентифицируется, выбирается и периодически обновляется совокупность передатчиков, излучающих радиосигналы с расширенным спектром. При моделировании оцениваются возможные зоны покрытия, априорные вероятности обнаружения и достижимые точности локализации и идентификации воздушных объектов различного класса, которые могут быть обеспечены при различных вариантах размещения передатчиков относительно станции обнаружения-пеленгования. Кроме того, в системе 2 регенерируются принятые прямые радиосигналы или формируются модельные сигналы передатчиков с требуемыми параметрами синхронизации.
Параметры выбранного передатчика (номер, несущая частота, ширина спектра, форма, параметры синхронизации и мощность излучаемого сигнала, координаты или расстояние и угловое положение относительно точки приема) запоминаются в подсистеме 2, поступают для запоминания в блок 4, а также используются для настройки преобразователей частоты 1-2 и 1-5. С целью упрощения цепи управления преобразователями частоты 1-2 и 1-5 не показаны.
По сигналам блока 4 АС 1-1 наводится на заданное азимутально-угломестное направление приема прямого сигнала выбранного РПД, АС 1-2 наводится на заданное направление приема по азимуту α и углу места β рассеянного радиосигнала, а преобразователи частоты 1-2 и 1-5 перестраиваются на заданную частоту приема. Заданное азимутально-угломестное направление приема (α, β) рассеянного радиосигнала сохраняется в блоке 4 для последующего вычисления географических координат обнаруженных объектов. Прямой радиосигнал s'(t) выбранного передатчика с расширенным спектром и рассеянный воздушным объектом радиосигнал s(t) этого передатчика когерентно принимаются на частоте двумя пространственно совмещенными приемными каналами.
Принятый АС 1-1 зависящий от времени t прямой радиосигнал s'(t), а также принятый АС 1-6 зависящий от времени t рассеянный радиосигнал s(t) переносится на более низкую частоту в преобразователях частоты 1-2 и 1-5 соответственно.
Сформированные в преобразователях частоты 1-2 и 1-5 радиосигналы s'(t) и s(t) синхронно преобразуются с помощью АЦП 1-3 и АЦП 1-4 в комплексный цифровой прямой сигнал s' и комплексный цифровой разведываемый сигнал s. Комплексные цифровые сигналы s и s' поступают в блоки 3-1 и 3-4 соответственно, где синхронно регистрируются на заданном временном интервале.
После этого в блоке 3-4 цифровой прямой сигнал s' преобразуется в матричный сигнал комплексной фазирующей функции A, который поступает в устройство 3-3, где запоминается.
В устройстве 3-3 из сигнала A последовательно вычисляются сигналы AH, AHA и (AHA)-1, которые поступают в блок 3-1, где запоминаются.
В блоке 3-1 с использованием цифрового разведываемого сигнала s, поступившего от АЦП 1-3, и сигналов AH и (AHA)-1, поступивших от блока 3-3, вычисляется сигнал начального приближения комплексного частотно-временного изображения h(0)=(AHA)-1 AHs.
Полученный в блоке 3-1 сигнал h(0) начального приближения запоминается в блоке 3-2 и транслируется в устройство 3-3 для запоминания и инициализации очередной итерации с номером k=1.
В устройстве 3-3 с использованием сигнала частотно-временного изображения, полученного на предыдущей итерации, то есть h(k-1)=h(0) при k=1, формируется взвешивающий сигнал Л(h(1)) и сигнал [AHA+λЛ(h(1))]-1AH. Значение множителя Лагранжа λ выбирают исходя из уровня шумов в каналах приема. Сигнал [AHA+λЛ(h(1))]-1AH поступает в блок 3-1.
В блоке 3-1 с использованием сигнала [AHA+λЛ(h(1))]-1AH и запомненного разведываемого сигнала s синтезируется сигнал текущего частотно-временного изображения h(1)[AHA+λЛ(h(1))]-1AHs.
Полученный сигнал h(1) поступает в блок 3-2.
В блоке 3-2 сигнал h(1) запоминается для использования на следующей итерации. Кроме этого в блоке 3-2 энергия разности частотно-временных изображений 
При невыполнении условия 
При выполнении условия 
В блоке 4 восстанавливаются квадраты модулей элементов текущего частотно-временного изображения
Результаты обнаружения и пространственной локализации воздушных объектов отображаются для повышения информативности.
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает повышение вероятности обнаружения далеких и слабо рассеивающих объектов за счет реализации новых операций нелинейной и адаптивной обработки с обратной связью по полезному радиосигналу.
Таким образом, за счет применения вместо корреляционной фильтрации принятых сигналов операций адаптивной обработки с обратной связью по полезному радиосигналу и операций нелинейной обработки принятых радиосигналов, обеспечивающих повышение чувствительности, динамического диапазона и разрешающей способности синтеза частотно-временного изображения рассеянных объектами радиосигналов и, как следствие, повышение вероятности обнаружения далеких и слабо рассеивающих объектов, удается решить поставленную задачу с достижением указанного технического результата.
Источники информации
1. Патент ЕАПО №008335 по Евразийской заявке №20050110; опубл. 29.08.2006 // Бюллетень Евразийского патентного ведомства - 2006. - №3.
2. RU, патент, 2472176, кл. G01S 13/02, 2013 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557251C1 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2522170C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО РАДИОКОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546330C1 |
| СПОСОБ ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2546331C2 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
| СПОСОБ СКРЫТНОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2724923C2 |
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2770176C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546329C1 |
Изобретение относится к радиотехнике и может быть использовано в системах контроля воздушного, наземного и морского пространства с использованием прямых и рассеянных подвижными объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения. Достигаемый технический результат - повышение вероятности обнаружения далеких и слабо рассеивающих объектов. Повышение вероятности обнаружения далеких и слабо рассеивающих объектов достигается за счет применения новых операций адаптивной и нелинейной обработки радиосигналов, рассеянных контролируемыми объектами. 3 ил., 1 табл.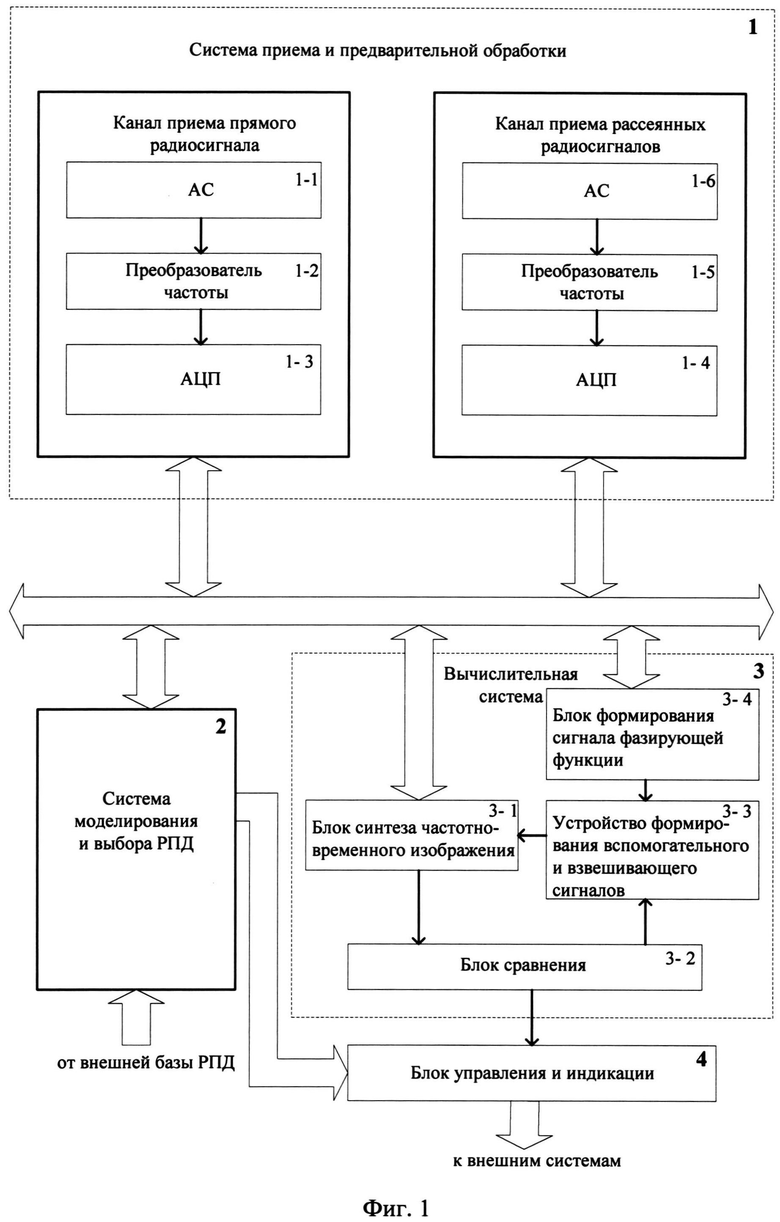
Способ скрытного обнаружения подвижных объектов, заключающийся в том, что когерентно принимают двумя пространственно совмещенными приемными каналами прямой радиосигнал от передатчика подсвета и рассеянный воздушными объектами разведываемый радиосигнал, синхронно преобразуют зависящие от времени прямой и разведываемый радиосигналы в комплексные цифровые сигналы, синхронно регистрируют цифровой прямой сигнал s' и цифровой разведываемый сигнал s, отличающийся тем, что преобразуют цифровой прямой сигнал s' в матричный сигнал комплексной фазирующей функции A, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом, запоминают матричный сигнал A, преобразуют цифровой разведываемый сигнал s в сигнал комплексного частотно-временного изображения h(0)=(AHA)-1AHs, где AH - матрица, эрмитово сопряженная с A, сигнал h(0) запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал


| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2011 |
|
RU2472176C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| МЕТКА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И КОНТРОЛЯ ОБЪЕКТОВ | 2007 |
|
RU2371734C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЕКАМЕТРОВОГО ДИАПАЗОНА | 2009 |
|
RU2408895C2 |
| Сборная железобетонная крепь для горных выработок | 1957 |
|
SU112446A1 |
| JP 6213943 A, 05.08.1994 | |||
| US 5923285 A1, 29.03.2006 | |||
| WO 2003079041 A3, 25.09.2003 | |||
| EP 1471364 A2, 27.10.2004. | |||

