Изобретение относится к измерительной технике, в частности к способу определения величины и направления перемещения контролируемого объекта, например, в навигации или авиационной промышленности.
Из монографии Астапов Ю.М., Васильев Д.В., Заложнев Ю.И. «Теория оптико-электронных следящих систем», М.: Наука., 1988, 324 с. известен способ решения навигационных задач удержания выбранного направления или определения величины и направления перемещения контролируемого объекта в пределах зоны наблюдения по результатам сравнения наблюдаемых и эталонных изображений путем определения величины и направления смещения видеоизображений. Оценка величины и направления смещения видеоизображений определялась блоком корреляционного дискриминатора (КД) одномерного сдвига изображений, который принимает синхронно на два входа текущие и эталонные видеокадры и формирует на выходе оценку сдвигов между ними по окончании очередной пары сравниваемых сигналов путем формирования значения дискриминационной характеристики (ДХ). Двумерный КД образуется парциальными дискриминаторами, каждый из которых оценивает одну из компонент аддитивного сдвига - в направлении строк или столбцов. Однако ввиду отсутствия стабилизации крутизны дискриминационной характеристики этот способ оказался очень неточным.
Известен способ совмещения изображений для определения величины и направления перемещения контролируемого объекта путем представления изображения объекта на растровой сетке и определения смещения из структуры растра «Васильев Д.В., Гапон А.В. Элементы теории решений обратных корреляционных задач» // Электромагнитные волны и электронные системы. 2009. Т 14. №7. С.30-39, прототип. Измеряют распределение интенсивности отраженного от объекта излучения в каждой строке эталонного и текущего растров fЭ(t) и fТ(t)=fэ(t-τ), затем fЭ(t) и fТ(t) подвергают фильтрации ортогональными нормированными четной C(t) и нечетной S(t) финитными функциями. В результате нестационарной линейной фильтрации сопоставляемых сигналов соответствующих растров получают коэффициенты
аЭ=(С(t), fЭ(t)), bЭ=(S(t), fЭ(t)),
аТ=(С(t), fТ(t)), bТ=(S(t), fТ(t)),
представляющие собой скалярные произведения и являющиеся коэффициентами разложения строк эталонного и текущего растров fЭ(t)=хЭ=[аЭ,bЭ]Т и fТ(t)=xТ=[aТ, bТ]т. Выполнив ортогонализацию вектора хэ умножением его на матрицу поворота
получают значение ортокорреляционной функции строк эталонного и текущего растров в виде
R(τ)=аЭbТ-аТbЭ.
Значение R(τ) определяет величину и направление перемещения контролируемого объекта в пределах зоны наблюдения.
В качестве базисных функций C(t) и S(t) в «Гапон А.В. Свойства ортокорреляционных дискриминаторов сдвига изображений» // Электромагнитные волны и электронные системы. 2009. Т 14. №7. С.23-29 предлагается использовать, например, отрезки гармонических функций, вмещающих целое число l периодов на интервале определения L:
C(t)=COS(ωt) и S(t)=SIN(ωt), 
Сущность этого способа связана со специфической формой ортокорреляционной функции строк эталонного и текущего растров, представленной на фиг.1, аналогичной дискриминационной характеристике корреляционного дискриминатора сдвига. В дальнейшем величину R(τ) преобразуют методом нормировки, заключающимся в непосредственном измерении наклона R(τ) в нуле («Развитие и применение корреляционных методов обработки изображений в быстродействующих оптико-электронных следящих системах» Фирсов А.Е. (Автореферат дисс. … канд. техн. наук). М.: МФТИ (ГУ). 2007). Именно такой способ обеспечивает бесступенчатые измерения сдвигов видеоизображений на непрерывной шкале значений независимо от шага его пространственной дискретизации, благодаря чему становится достижимым определение величины перемещения объекта, которая прямо не связана с разрешением видеоизображений.
Однако в случае необходимости определения величины и направления смещения контролируемого объекта, расположенного не на однородной фоновой поверхности, этот способ теряет свои преимущества. В случае перемещения объекта на неоднородной фоновой поверхности возникает «краевой эффект», то есть текущее и эталонное изображения отличаются не только сдвигом, но и новыми фрагментами, появляющимися на краях рабочего поля зрения, влияние которых растет пропорционально увеличению сдвига. Кроме этого в «Свойства ортокорреляционных дискриминаторов сдвига изображений» Гапон А.В. // Электромагнитные волны и электронные системы. 2009. Т 14. №7. С.30-39. утверждается, что не существует универсального способа нормировки крутизны ортокорреляционной функции, дающего оптимальный результат для всех возможных случаев базисных функций.
Таким образом, перед автором стояла задача разработать способ минимизации влияния «краевого эффекта» и универсальный способ стабилизации крутизны наклона дискриминационной характеристики, (технический результат), что позволило бы повысить точность и надежность способа определения величины и направления перемещения контролируемого объекта.
Поставленная задача решена предлагаемым, согласно изобретению, способом путем представления его изображения на растровой сетке видеокамеры и определения совмещения видеоизображений из структуры растра, включающим двумерное измерение распределения интенсивности отраженного от объекта излучения в каждой строке эталонного и текущего растров объекта, путем обработки соответствующих строк эталонного и текущего растров fЭ(t) и fТ(t) выделяют центральные части строк укороченной длины L3<L:  ,
,  ,
,  , где θ - задаваемый параметр, определяющий ширину монотонной рабочей зоны (МРЗ), формируют значение дискриминационной характеристики Dθ(τ) как разность корреляционных функций циклически сдвинутой укороченной строки эталонного растра
, где θ - задаваемый параметр, определяющий ширину монотонной рабочей зоны (МРЗ), формируют значение дискриминационной характеристики Dθ(τ) как разность корреляционных функций циклически сдвинутой укороченной строки эталонного растра  и соответствующей укороченной строки текущего растра
и соответствующей укороченной строки текущего растра  , раздвинутых относительно точки τ=0 на ±θ:
, раздвинутых относительно точки τ=0 на ±θ:

где Θ и ⊕ - операции вычитания и сложения по mod L3 соответственно
 ,
,  , а
, а  и
и 
формируются согласно выражениям
 и
и  .
.
В дальнейшем производят стабилизацию крутизны наклона Dθ(τ):
 , если для текущей строки растра Dθ(τ)>0, и
, если для текущей строки растра Dθ(τ)>0, и
 , в противном случае, где
, в противном случае, где
 и
и  .
.
Итоговая оценка величины и направления перемещения контролируемого объекта формируют усреднением соответствующих оценок по всем строкам растра.
В настоящее время из патентной и научной литературы неизвестна совокупность предлагаемых согласно изобретению признаков, позволяющих решить изложенную выше техническую задачу.
Дальнейшие подробности изобретения следуют из приведенного примера осуществления способа с помощью чертежей.
На них изображены:
Фиг.1 - дискриминационная характеристика корреляционного дискриминатора сдвига, предельная рабочая зона (ПРЗ) и монотонная рабочая зона (МРЗ)
Фиг.2 - алгоритм обработки видеоизображения в составе блоков:
1 - блок расчета циклической автокорреляционной функции  строки эталонного растра длины L, в котором для строки эталонного растра полной длины L рассчитывается циклическая автокорреляционная функция согласно выражению
строки эталонного растра длины L, в котором для строки эталонного растра полной длины L рассчитывается циклическая автокорреляционная функция согласно выражению  ;
;
2 - блок расчета параметра θ, определяющий максимально допустимый размер линейного участка МРЗ дискриминационной характеристики;
3 - блок формирования строки эталонного растра  укороченной длины L3=L-2*θ, в котором из середины строки эталонного растра fЭ(t) длины L выделяется центральная часть длиной L3;
укороченной длины L3=L-2*θ, в котором из середины строки эталонного растра fЭ(t) длины L выделяется центральная часть длиной L3;
4 - блок циклического сдвига  вправо на θ :
вправо на θ :  , в котором отсчеты укороченной строки эталонного растра
, в котором отсчеты укороченной строки эталонного растра  циклически сдвигаются вправо на θ позиций;
циклически сдвигаются вправо на θ позиций;
5 - блок циклического сдвига  влево на θ :
влево на θ :  , в котором отсчеты укороченной строки эталонного растра
, в котором отсчеты укороченной строки эталонного растра  циклически сдвигаются влево на θ позиций;
циклически сдвигаются влево на θ позиций;
6 - блок расчета величины  ;
;
7 - блок расчета нормировочного коэффициента  , на вход которого подают входную строку эталонного растра fЭ(t), значение
, на вход которого подают входную строку эталонного растра fЭ(t), значение  с выхода блока 6 и параметр θ с выхода блока 2, с помощью которых вычисляется величина нормировочного коэффициента
с выхода блока 6 и параметр θ с выхода блока 2, с помощью которых вычисляется величина нормировочного коэффициента  , используемого для нормировки отрицательного значения дискриминационной характеристики Dθ(t0);
, используемого для нормировки отрицательного значения дискриминационной характеристики Dθ(t0);
8 - блок расчета нормировочного коэффициента  , на вход которого подают входную строку эталонного растра fЭ(t), значение
, на вход которого подают входную строку эталонного растра fЭ(t), значение  с выхода блока 6 и параметр θ с выхода блока 2, с помощью которых вычисляется величина нормировочного коэффициента
с выхода блока 6 и параметр θ с выхода блока 2, с помощью которых вычисляется величина нормировочного коэффициента  , используемого для нормировки положительного значения дискриминационной характеристики Dθ(t0);
, используемого для нормировки положительного значения дискриминационной характеристики Dθ(t0);
9 - блок расчета величины дискриминационной характеристики Dθ(t0);
10 - блок формирования строки текущего растра  укороченной длины L3=L-2*θ, в котором из середины строки текущего растра fТ(t) длины L выделяется центральная часть длиной L3;
укороченной длины L3=L-2*θ, в котором из середины строки текущего растра fТ(t) длины L выделяется центральная часть длиной L3;
11 - блок нормировки значения дискриминационной характеристики Dθ(tθ), в котором отрицательное значение дискриминационной характеристики Dθ(tθ) нормируется на величину  , а положительное на величину
, а положительное на величину  .
.
Фиг.3 - Автокорреляционная функция  сигнала fЭ(t)
сигнала fЭ(t)
Фиг.4 - Процесс построения Dθ(τ)
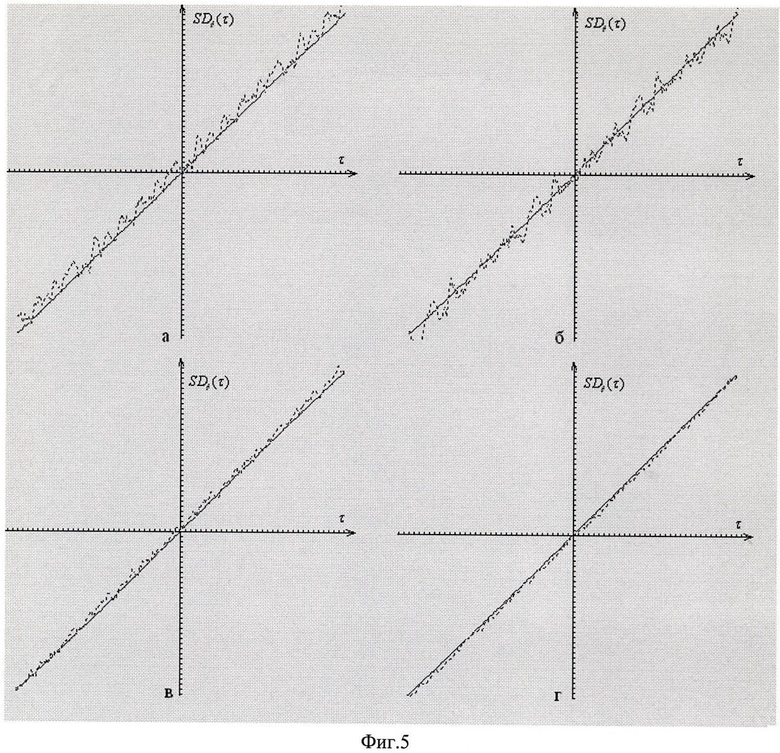
Фиг.5 - Субпиксельные ДХ модернизированного способа (сплошная линия) и прототипа (пунктирная линия).
На фиг.2 показана схема алгоритма обработки видеоизображения. Весь процесс функционирования алгоритма разбивается на два этапа: подготовительный и основной. Подготовительный этап выполняется только один раз в момент формирования строки эталонного растра fЭ(t),  , и предназначен для определения следующих величин: параметра θ, разности
, и предназначен для определения следующих величин: параметра θ, разности  и нормирующих коэффициентов
и нормирующих коэффициентов  и
и  . Строку эталонного растра fЭ(t),
. Строку эталонного растра fЭ(t),  , подают на вход блока 1 вычисления циклической автокорреляционной функции
, подают на вход блока 1 вычисления циклической автокорреляционной функции  сигнала fэ(t). На фиг.3 показан вид автокорреляционной функции
сигнала fэ(t). На фиг.3 показан вид автокорреляционной функции  . Выходной сигнал
. Выходной сигнал  подводят к блоку 2 определения параметра θ. Поиск максимально допустимого значения параметра θ производится по правилу: для всех значений
подводят к блоку 2 определения параметра θ. Поиск максимально допустимого значения параметра θ производится по правилу: для всех значений  рассчитывается средняя абсолютная разница E(θ) между значениями функции Dθ(τ) на линейном участке МРЗ в пределах интервала [-θ,θ] и наклонной линией, описываемой уравнением
рассчитывается средняя абсолютная разница E(θ) между значениями функции Dθ(τ) на линейном участке МРЗ в пределах интервала [-θ,θ] и наклонной линией, описываемой уравнением  , определенной на этом же интервале. Максимальное значение θ, при котором E(θ) не превысит задаваемой погрешности, и будет искомой величиной параметра θ. Значение параметра θ передается на блоки 3, 7, 8 и 10. В блоке 3 формируется сигнал
, определенной на этом же интервале. Максимальное значение θ, при котором E(θ) не превысит задаваемой погрешности, и будет искомой величиной параметра θ. Значение параметра θ передается на блоки 3, 7, 8 и 10. В блоке 3 формируется сигнал  ,
,  . На фиг.4 показан процесс определения параметра θ. В блоках 4 и 5 производится циклический сдвиг сигнала
. На фиг.4 показан процесс определения параметра θ. В блоках 4 и 5 производится циклический сдвиг сигнала  для получения
для получения  и
и  соответственно. В блоке 6 вычисляется разность
соответственно. В блоке 6 вычисляется разность  которая в последующем поступает в блоки 7, 8 и 9. В блоках 7 и 8 на основе fЭ(t), параметра θ и функции
которая в последующем поступает в блоки 7, 8 и 9. В блоках 7 и 8 на основе fЭ(t), параметра θ и функции  ,
,  вычисляются нормировочные коэффициенты
вычисляются нормировочные коэффициенты  и
и  соответственно. На этом предварительный этап заканчивается. Основной этап функционирования наступает с момента поступления строки текущего растра fТ(t) на вход модуля 10, где на основе fТ(t) и θ определяется
соответственно. На этом предварительный этап заканчивается. Основной этап функционирования наступает с момента поступления строки текущего растра fТ(t) на вход модуля 10, где на основе fТ(t) и θ определяется  ,
,  , который в дальнейшем передается в блок 9 для расчета величины Dθ(t0). Окончательный результат рассчитывается в блоке 11 на основе Dθ(t0),
, который в дальнейшем передается в блок 9 для расчета величины Dθ(t0). Окончательный результат рассчитывается в блоке 11 на основе Dθ(t0),  и
и  .
.
Для моделирования описанного способа совмещения видеоизображений для определения величины и направления перемещения объекта и сравнение его с прототипом производилось построение статических ДХ в условиях отсутствия помех. В качестве одномерного сигнала  ,
,  формировалась функция
формировалась функция  , где k - номер реализации функции,
, где k - номер реализации функции,  , L1=768; L2=(1/SubPixel) и N=50. Для исключения ошибок квантования функции fk(t) и получения на ее основе
, L1=768; L2=(1/SubPixel) и N=50. Для исключения ошибок квантования функции fk(t) и получения на ее основе  с произвольным сдвигом значения fk(t) рассчитывались с учетом минимального шага дискретизации: SubPixel=0.005. Величины
с произвольным сдвигом значения fk(t) рассчитывались с учетом минимального шага дискретизации: SubPixel=0.005. Величины  (смещение) и
(смещение) и  (масштаб) формировались случайным образом (процедурой RANDOM) в диапазоне [0..768] для
(масштаб) формировались случайным образом (процедурой RANDOM) в диапазоне [0..768] для  и [0..50] для
и [0..50] для  .
.
Строка эталонного растра  , длиной L=300 пикселей, формируется из центральной части fk(t) по формуле
, длиной L=300 пикселей, формируется из центральной части fk(t) по формуле  ,
,  , где Bэ - начало эталонного сигнала, равное Bэ=(768/2-150).
, где Bэ - начало эталонного сигнала, равное Bэ=(768/2-150).
Строка текущего растра  формируется из fk(t) по формуле
формируется из fk(t) по формуле  ,
,  , где τ=δ/SubPixel, δ - задаваемый сдвиг, кратный величине SubPixel.
, где τ=δ/SubPixel, δ - задаваемый сдвиг, кратный величине SubPixel.
Было проведено 200 экспериментов. Квант взаимного смещения строк растров составлял 1 пиксель. Всего моделировалось ±160 сдвигов. Проведенные эксперименты показали, что погрешность определения взаимного сдвига строк растров в пределах МРЗ у модернизированного способа ниже, чем у прототипа. Характерные выборочные данные для 10 опытов приведены в табл.1. Из табл.1 видно, что средняя погрешность прототипа, вычисленная в пределах МРЗ в интервале [-θ,θ], в среднем в 1.54 раза превышает погрешность модернизированного способа. Сравнительный анализ максимальной ошибки показывает, что у прототипа она в три с лишним раза больше, чем у модернизированного.

Моделирование по оценке субпиксельных взаимных сдвигов сигналов проводилось для ±160 сдвигов при величине параметра θ=1. Величина сдвига составляла 0.005 пикселя. Данные экспериментов, представленные на фиг.5, приведены в табл.2.
На фиг.5 представлены субпиксельные ДХ модернизированного способа, изображенные сплошными линиями, и прототипа, представленные пунктирными линиями.
Из табл.2 видно, что и средняя погрешность прототипа, и максимальная ошибка почти на порядок больше, чем у модернизированного способа определения совмещения видеоизображений для определения величины и направления перемещения объекта
Таким образам автором разработан и проверен надежный и быстрый способ определения величины и направления движения контролируемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА СЛЕЖЕНИЯ | 2004 |
|
RU2284552C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ, СОСТОЯЩАЯ ИЗ ГОЛОВКИ СОВМЕЩЕНИЯ ИЗОБРАЖЕНИЙ И САМОНАСТРАИВАЮЩЕГОСЯ АВТОПИЛОТА | 1960 |
|
SU1840806A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2000 |
|
RU2197070C2 |
| ЛАЗЕРНАЯ СИСТЕМА ТЕЛЕОРИЕНТАЦИИ | 2003 |
|
RU2267734C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССОГЛАСОВАНИЯ В ДВУМЕРНЫХ СЛЕДЯЩИХ СИСТЕМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2282874C2 |
| Устройство для автоматического сопровождения объекта слежения | 2018 |
|
RU2694888C1 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ СИГНАЛОВ ЯДЕРНОГО КВАДРУПОЛЬНОГО И ЯДЕРНОГО МАГНИТНОГО РЕЗОНАНСА | 2011 |
|
RU2490618C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАССОГЛАСОВАНИЯ В ДВУМЕРНЫХ СЛЕДЯЩИХ СИСТЕМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2305296C2 |
| СПОСОБ АНАЛИЗА НЕСТАЦИОНАРНОГО ПРОЦЕССА | 1998 |
|
RU2159956C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
Изобретение относится к измерительной технике. Согласно способу изображение объекта представляют на растровой сетке видеокамеры и определяют совмещение видеоизображений из структуры растра. Производят измерение двумерного распределения интенсивности отраженного от объекта излучения в каждой строке эталонного и текущего растров и их последующую цифровую обработку. Путем выделения центральной части строк эталонного и текущего растров формируют сигналы укороченной длины. Цифровую обработку сигналов производят путем определения значения дискриминационной характеристики как разности корреляционных функций измеренных циклически сдвинутых укороченных строк эталонного растра и соответствующих строк текущего растра. Далее нормируют крутизну наклона дискриминационной характеристики на значение дискриминационной характеристики в крайних точках монотонной рабочей зоны, в зависимости от знака вычисленного значения дискриминационной характеристики. Величину и направление перемещения контролируемого объекта определяют усреднением оценок по всем строкам растра. Технический результат - повышение точности и надежности за счет минимизации влияния «краевого эффекта» и стабилизации крутизны наклона дискриминационной характеристики. 5 ил., 2 табл.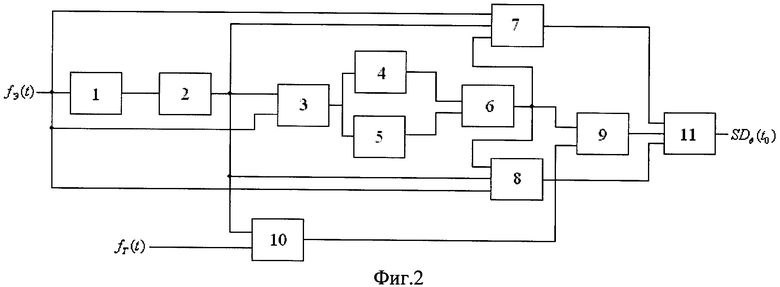
Способ определения величины и направления перемещения контролируемого объекта путем представления его изображения на растровой сетке видеокамеры и определения совмещения видеоизображений из структуры растра, включающий двумерное измерение распределения интенсивности отраженного от объекта излучения в каждой строке эталонного и текущего растров и их последующую цифровую обработку, отличающийся тем, что путем выделения центральной части строк эталонного и текущего растров формируют сигналы укороченной длины, а цифровую обработку сигналов производят путем определения значения дискриминационной характеристики как разности корреляционных функций измеренных циклически сдвинутых укороченных строк эталонного растра и соответствующих строк текущего растра и последующей нормировки крутизны наклона дискриминационной характеристики на значение дискриминационной характеристики в крайних точках монотонной рабочей зоны, в зависимости от знака вычисленного значения дискриминационной характеристики, при этом величину и направление перемещения контролируемого объекта определяют усреднением оценок по всем строкам растра.
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| СПОСОБ СЕЛЕКЦИИ НАЗЕМНЫХ И ВОЗДУШНЫХ ОБЪЕКТОВ (ЕГО ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1999 |
|
RU2173881C2 |
| RU 2058011 C1, 10.04.1996 | |||
| US 4725829 A1, 16.02.1988 | |||
| JP 61233952 A, 18.10.1986. | |||

