Изобретение относится к аэродинамическим органам стабилизации летательных аппаратов (см. энциклопедию "Авиация", научное издательство "Большая российская энциклопедия", Центральный аэрогидродинамический институт имени профессора Н.Е.Жуковского, Москва, 1994 г.).
Наиболее близкими по функциональному назначению прототипами являются классические стабилизаторы и дестабилизаторы. Эти аэродинамические поверхности предназначены для обеспечения рациональной степени продольной статической устойчивости, характеризуемой расстоянием между положением аэродинамического фокуса летательного аппарата (ЛА) и положением центра масс ЛА.
Существенным признаком предлагаемого решения, совпадающим с существенным признаком прототипа, является обеспечение рационального с точки зрения устойчивости и управляемости ЛА положения аэродинамического фокуса ЛА относительно центра масс ЛА.
К недостаткам прототипов следует отнести отсутствие возможности управлять положением аэродинамического фокуса в зависимости от текущего положения центра масс и текущих условий полета.
Техническим результатом, на решение которого направлено предлагаемое изобретение, является обеспечение в каждый момент полета желательного соотношения между положением центра масс и положением аэродинамического фокуса.
Указанный технический результат достигается за счет использования эффектов статической аэроупругости, для чего аэродинамическая поверхность выполнена поворотной и снабжена валом, соединенным с рулевой машиной посредством рычажного механизма. Рычажный механизм, передающий шарнирный момент с вала на рулевую машину, содержит одно или несколько звеньев, представляющих собой механические либо пневматические пружины. При этом параллельные механизмы, передающие шарнирный момент с вала на привод в обход пружинных элементов отсутствуют. Управление положением фокуса осуществляется перемещением штока рулевой машины, что приводит к изменению силы натяжения или сжатия пружины.
Отличительными признаками предлагаемого органа управления является то, что он выполнен в виде поворотной аэродинамической поверхности, соединенной с помощью рычажного механизма с рулевой машиной, причем одно или несколько звеньев рычажного механизма являются механическими либо пневматическими пружинами.
Пусть две одинаковые аэродинамические поверхности (АП) размещены симметрично справа и слева по борту летательного аппарата (ЛА). На фиг.1 показана левая поверхность. Пусть в исходном положении ось штока 2, совпадая с осью пружины 4, проходит через ось 8 вала 6, т.е. механизм находится в мертвом положении. В этом случае перемещение штока рулевой машины 9 не может вызвать поворота АП, а лишь натягивает либо сжимает пружину 4. Пусть также ось поворота 8 вала 6 расположена впереди точки приложения равнодействующей аэродинамических сил, действующих на АП.
Случай, когда рулевая машина натягивает пружину. При положительном угле атаки ЛА на АП будет действовать отрицательный аэродинамический шарнирный момент, который стремится уменьшить угол атаки АП относительно потока. В итоге этот угол станет меньше, чем угол атаки ЛА. Очевидно, что подъемная сила, возникающая на АП, будет тем больше, чем больше растягивающая сила в пружине, но при уменьшении силы в пружине до нуля АП превратится во флюгер, и ее подъемная сила станет нулевой. Таким образом, натягивая пружину больше или меньше, мы меняем несущую способность АП от нуля (флюгер) до значения, почти соответствующего жесткому прикреплению АП к ЛА (максимальная сила натяжения). При этом положительному углу атаки ЛА будет соответствовать положительная подъемная сила АП. Если при этом АП расположена впереди центра масс ЛА, она будет эквивалентна обычному дестабилизатору, площадь которого тем больше, чем больше натяжение пружины, если же АП расположена позади центра масс, то эквивалентна обычному стабилизатору, площадь которого тем больше, чем больше натяжение пружины.
Случай, когда рулевая машина сжимает пружину. Если уменьшая силу натяжения пружины перейти нулевой уровень и начать ее сжимать, то картина поменяется следующим образом. При силе сжатия, не превышающий некоторый критический уровень, и при нулевом угле атаки ЛА угол отклонения АП будет нулевым. При возникновении положительного угла атаки ЛА под действием отрицательного аэродинамического шарнирного момента АП повернется на отрицательный угол. Если бы пружина не была сжата, АП перешла бы во флюгерное положение и ее угол поворота был бы равен углу атаки со знаком минус. Но сила, сжимающая пружину, заставит АП двигаться дальше, так что окончательный угол поворота АП станет по величине больше угла атаки. В итоге АП приобретет отрицательный угол поворота относительно набегающего потока, и подъемная сила, действующая на АП, станет отрицательной. Если при этом АП расположена впереди центра масс, то момент, создаваемый АП относительно центра масс, будет стремиться уменьшить угол атаки ЛА, и АП будет выполнять ту же функцию, что и классический стабилизатор (аэродинамическая поверхность, жестко прикрепленная к фюзеляжу позади центра масс ЛА). Заметим, что полет стрелы с оперением впереди может сбыть устойчивым, а с оперением позади неустойчивым, если оперение устроено так, как это описано выше.
Таким образом, в рассмотренном примере увеличение натяжения пружины сдвигает фокус ЛА вперед, если АП расположены впереди центра масс ЛА, и сдвигает фокус ЛА назад, если АП расположены позади центра масс ЛА. Увеличение силы сжатия пружины приводит к противоположному эффекту. Изменение усилия в пружине осуществляется путем перемещения штока привода.
Возможность управления положением аэродинамического фокуса в процессе полета с помощью предлагаемого органа стабилизации демонстрируется приведенным ниже примером фиг.2 и фиг 3.
На фиг.2 показано исходное состояние одного из возможных вариантов рассматриваемого органа стабилизации. Предполагаем, что в этом состоянии аэродинамический шарнирный момент отсутствует, а механизм передачи усилия находится в мертвом положении, т.е. шарниры О, А и В лежат на одной прямой (хотя на рисунке линия ОАВ совпадает с осью летательного аппарата, это не обязательно). Считаем, что тяга АВ выполнена в виде пружины, коэффициент жесткости которой обозначим через k. Очевидно, что при отсутствии аэродинамического шарнирного момента любому положительному перемещению штока рулевой машинки хш (т.е. любому смещению влево конца В пружины) будет соответствовать один и тот же угол отклонения рулевой поверхности δ0 (угол начальной установки).
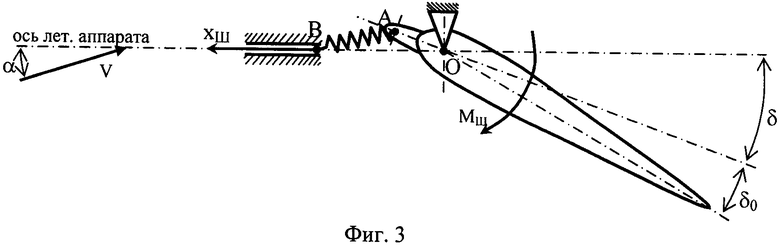
Рассмотрим теперь ситуацию, соответствующую отклонению руля под действием аэродинамического шарнирного момента Мш на угол δ от исходного положения (фиг.3).
Уравнение равновесия составим в вариационном виде:

Здесь Π - потенциальная энергия пружины,  .
.
В свою очередь ΔL - приращение длины пружины, имеющей длину L в недеформированном состоянии (т.е. в недеформированном состоянии АВ=L).
Таким образом,

Воспользовавшись теоремой Пифагора, запишем соотношение
(L+ΔL)2=(хШ+L+ОА-ОА·cosδ)2+(ОА·sinδ)2,
из которого получим:

После несложных операций уравнение равновесия приобретет вид:

Полученное уравнение является нелинейным относительно угла δ. Однако для имеющих практический смысл геометрических размеров и малых углов δ(δ<0.3 рад.) оно может быть линеаризовано почти без потери точности. Нетрудно получить следующее линеаризованное уравнение:

Примем, что для шарнирного момента от аэродинамических сил справедлива следующая линеаризованная зависимость:

Здесь ρ, V - соответственно плотность воздуха и скорость полета,
S - площадь поворотной поверхности,
 - производная коэффициента шарнирного момента
- производная коэффициента шарнирного момента
аэродинамической поверхности по углу отклонения 5.
Выше для простоты мы положили, что шарнирный момент МШ0, соответствующий нулевой подъемной силе поверхности, равен нулю (это соответствует симметричному профилю). Мы предположили также, что производные коэффициента шарнирного момента по α и δ равны друг другу.
Подставив (5) в (4) и разрешив полученное уравнение относительно угла 5, получим:
Здесь  - скоростной напор.
- скоростной напор.
Запишем теперь линеаризованное выражение для подъемной силы, действующей на рулевую поверхность:

Это выражение также является приближенным, поскольку принято, что производные коэффициента подъемной силы  и
и  одинаковы.
одинаковы.
Подставив (6) в (7), придем к окончательному выражению для подъемной силы рулевой поверхности:

Это выражение перепишем следующим образом

Здесь
Величину SЭ назовем эквивалентной площадью рассматриваемой аэродинамической поверхности.
Из формул (9) и (10) следует, что рассматриваемая нами поворотная поверхность создает такую же подъемную силу, как и жестко закрепленная (неповоротная) поверхность с площадью SЭ=SЭ(xШ). Как видим, величина эквивалентной площади зависят от ряда конструктивных параметров (L, ОА,  , k), условий полета (q,
, k), условий полета (q,  ), а также от перемещения штока рулевой машинки хШ. Последнее обстоятельство позволяет путем изменения хШ управлять величиной эквивалентной площади в процессе полета, а, следовательно, и положением аэродинамического фокуса летательного аппарата.
), а также от перемещения штока рулевой машинки хШ. Последнее обстоятельство позволяет путем изменения хШ управлять величиной эквивалентной площади в процессе полета, а, следовательно, и положением аэродинамического фокуса летательного аппарата.
Обратим внимание на то, что в отличие от обычной площади эквивалентная площадь может принимать и отрицательные значения. Это означает, что при определенных условиях положительные углы атаки летательного аппарата вызывают на рассматриваемой нами поверхности отрицательную подъемную силу.
Перечислим цели, которые могут быть достигнуты при использовании предлагаемого органа управления аэродинамическим фокусом.
1. Оптимизация условий управления полетом.
Зная в каждый момент полета положение центра масс летательного аппарата, число Маха и скоростной напор, с помощью управления величиной хШ можно добиться оптимального (с точки зрения решения задач управления) рассогласования между положением центра тяжести летательного аппарата и положением его аэродинамического фокуса.
2. Минимизация мощности приводов, используемых для управления полетом.
Система управления любого летательного аппарата выполняет две функции.
Первая функция - балансировка моментов всех сил относительно центра масс. Балансировка нарушается вследствие изменения положения центра масс (расход топлива) и от скорости полета (число Маха), т.е. она зависит от сравнительно медленно меняющихся параметров.
Вторая функция - оперативное управление, т.е. управление для реализации заданных алгоритмов движения (траекторий) и парирование непредвиденных возмущений. Это управление должно обладать достаточным быстродействием.
Традиционная система управления, исполнительными органами которой являются, например, поворотные стабилизаторы, выполняет обе эти функции одними и теми же органами управления (в данном случае поворотными стабилизаторами). При этом шарнирный момент стабилизаторов, преодолеваемый рулевой машинкой, должен соответствовать требованиям балансировки, а скорость поворота стабилизаторов - требованиям оперативного управления. Поскольку мощность есть произведение шарнирного момента на угловую скорость, произведение этих величин и определяет потребную мощность приводов.
При использовании рассматриваемых здесь органов управления функция балансировки может быть выполнена именно этими поверхностями, причем потребная скорость перемещения штока соответствующего привода определяется скоростями изменения центровки, скоростного напора и числа Маха. Поскольку в ряде важных случаев эти скорости невелики, то и потребная мощность соответствующих приводов может быть небольшой. В связи с тем, что функция балансировки с рулевых поверхностей, используемых для оперативного управления, теперь снята, их площади и соответствующие шарнирные моменты могут быть существенно уменьшены. Таким образом, общая потребная мощность приводов всех рулей окажется меньшей, чем при традиционном управлении.
3. Новые возможности в компоновках летательных аппаратов.
При значениях хШ, соответствующих отрицательным значениям эквивалентной площади, рассматриваемый орган управления, будучи установленным впереди центра масс летательного аппарата, выполняет роль стабилизатора, а при размещении позади центра масс - роль дестабилизатора. Это парадоксальное свойство может оказаться полезным в ряде случаев.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ФЛЮГЕРНЫМ ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ | 2015 |
|
RU2609620C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ СХЕМЫ "ФЛЮГЕРНАЯ УТКА" (КРАСНОВ-УТКА) | 2015 |
|
RU2609644C1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1994 |
|
RU2090446C1 |
| Рулевой привод управляемой аэродинамической поверхности летательного аппарата | 1990 |
|
SU1794804A1 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2646691C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕОБРАЗУЕМОГО В ЛЕТАТЕЛЬНЫЙ АППАРАТ, И ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169085C1 |
| АЭРОДИНАМИЧЕСКАЯ СХЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2093417C1 |
| СПОСОБ ПОВОРОТА УПРАВЛЯЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2193992C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| ВЕРТОЛЕТ | 1993 |
|
RU2089455C1 |

Изобретение относится к аэродинамическим органам стабилизации летательных аппаратов. Орган управления аэродинамическим фокусом летательного аппарата включает аэродинамическую поверхность, закрепленную на валу, рулевую машину и рычажный механизм передачи шарнирного момента от вала к штоку рулевой машины. Рычажный механизм передает на шток рулевой машины шарнирный момент, создаваемый аэродинамической поверхностью, через одно или несколько своих звеньев, являющихся механическими либо пневматическими пружинами. Изобретение направлено на обеспечение соотношения между положением центра масс и положением аэродинамического фокуса. 3 ил.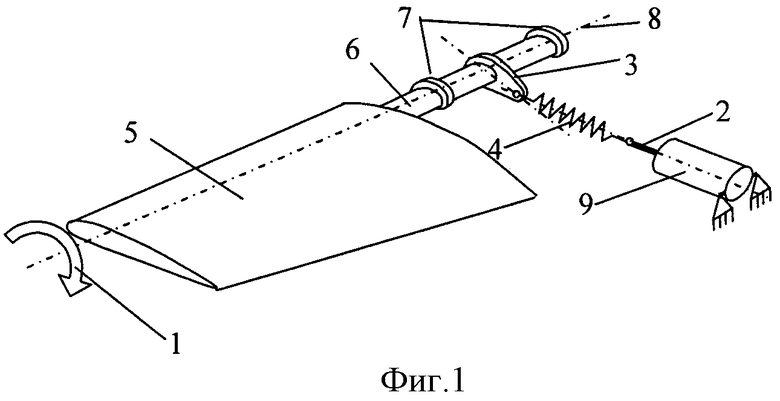
Орган управления аэродинамическим фокусом летательного аппарата, включающий аэродинамическую поверхность, закрепленную на валу, рулевую машину и рычажный механизм передачи шарнирного момента от вала к штоку рулевой машины, отличающийся тем, что рычажный механизм передает на шток рулевой машины шарнирный момент, создаваемый аэродинамической поверхностью, через одно или несколько своих звеньев, являющихся механическими либо пневматическими пружинами.
| Энциклопедия | |||
| Авиация | |||
| Научное издательство Большая Российская Энциклопедия, ЦАГИ, 1994, с.207, 393, 539, 577, 604, 605, 646 | |||
| RU 2007109395 А, 20.09.2008 | |||
| Импульсный транзисторный усилитель | 1988 |
|
SU1550607A1 |
| ПРОТИВОБЛОКИРОВОЧНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025341C1 |
| US 7165746 В2, 23.01.2007. | |||

