Изобретение относится к области рулевых приводов аэродинамических поверхностей (аэродинамические рули высоты и направления, элероны, управляемый стабилизатор, управляемый киль, поворотное крыло) летательного аппарата (ЛА) и может быть использовано при создании новых и модернизации существующих ЛА.
Известен газовый рулевой привод управляемой аэродинамической поверхности (УАП), который содержит рулевую машину с управляющим звеном, состоящим из электромеханического преобразователя (ЭМП) и газового усилителя (ГУ),.суммирующий усм- литель (СУ), усилитель мощности (УМ) и по- тенциометр обратной связь (ПОС), являющийся датчиком угла (ДУ) поворота УАП относительно корпуса ЛА, причем выходной вал рулевой машины механически связан с осью УАП и входом ДУ, первый вход СУ электрически связан с выходом блока формирования входного сигнала DBX рулевого привода, второй вход СУ электрически
связан с выходом ДУ, выход суммирующего усилителя электрически связан с входом УМ, а выход УМ электрически связан с входом управляющего звена рулевой машины. Недостатками этого привода являются сравнительно невысокие быстродействие и жесткость, обусловленные сжимаемостью газа, а также существенное увеличение массы привода с ростом времени полета летательного аппарата и потребной мощности привода.
Известен также гидравлический рулевой привод, который содержит рулевую машину с управляющим звеном, являющимся электрогидравлическим усилителем, суммирующий усилитель (СУ), усилитель мощности (УМ) и потенциометр обратной связи (ПОС), являющийся датчиком угла (ДУ) поворота УАП, причем выходной вал рулевой машины механически связан с осью УАП и входом ДУ, первый вход СУ электрически связан с выходом блока формирования входного сигнала UBx рулевого привода, втоVJ
ю
00
g
рой вход СУ электрически связан с выходом ДУ, выход СУ электрически связан с входом УМ, а выход УМ электрически связан с входом управляющего звена рулевой машины. Недостатком этого привода является большое значение потребной мощности рулевой машины, обусловленное тем, что выходной вал рулевой машины должен с большой угловой скоростью поворачивать ось УАП, преодолевая значительный шарнирный момент УАП, Большое значение потребной мощности рулевой машины вызывает большие значения ее размеров и массы, а также большой запас энергии, необходимой для работы рулевой машины. .
Прототипом заявляемого изобретения следует считать гидравлический привод УАП, который содержит рулевую машину с управляющим звеном, являющимся электрогидравлическим усилителем, суммирующий усилитель (СУ), усилитель мощности .(УМ) и потенциометр обратной связи (ПОС), являющийся датчиком угла (ДУ) поворота УАП, причем первый вход СУ электрически связан с выходом блока формирования входного сигнала UBx рулевого привода, второй вход.СУ электрически связан с выходом ДУ, выход суммирующего усилителя электрически связан с входом усилителя мощности, а выход усилителя мощности электрически связан с входом управляющего звена рулевой машины.
Кроме того, в прототипе выходной вал рулевой машины механически связан с осью управляемой аэродинамической поверхности и с входом ДУ.
Недостатком указанного рулевого привода является большое значение потребной мощности рулевой машины, так как рулевая машина, отклоняя УАП с большой угловой скоростью, обусловленной потребным высоким быстродействием процесса отклонения УАП, должна преодолевать значительный шарнирный момент УАП. Большое значение потребной мощности рулевой машины обуславливает большое зна- чени е размеров и массы рулевой машины и большой запас энергии на борту ЛА, используемой для работы рулевой машины,
Целью изобретения является обеспечение отклонения управляемой аэродинамической поверхности на заданный угол при уменьшении потребной мощности рулевой машины.
Поставленная цель достигается тем, что в состав привода введены дополнительная управляющая аэродинамическая поверхность (ДУАП), установленная на задней кромке УАП с возможностью вращения относительно оси, параллельной оси УАП, датчик угловой скорости (ДУС) поворота УАП и датчик углового ускорения (ДУУ) поворота УАП, причем осо ДУАП механически связана с выходным валом рулевой машины, ДУ,
ДУС и ДУУ механически связаны с УАП, выход ДУС электрически связан с третьим входом суммирующего усилителя, а выход ДУУ электрически связан с четвертым входом суммирующего усилителя.
Таким образом, в отличие от прототипа, в котором рулевая машина непосредственно поворачивает УАП на угол 5 , в предлагаемом рулевом приводе рулевая машина поворачивает дополнительную управляющую аэродинамическую поверхность (ДУАП) на угол 5т относительно УАП. При этом ДУАП оказывается под углом атаки ат, значение которого при нулевом значении угла атаки ЛА определяется выражением
ат 5т - 5 ,
0)
и на ДУАП создается подъемная аэродинамическая сила, которая создает момент Мт относительно оси вращения УАП
YT С$ -а, -Зт -q,(2) . ITy , (3)
где Сут - производная по углу атаки коэффициента подъемной силы ДУАП; Зт - площадь ДУАП; q - скоростной напор на высоте
полета ЛА со скоростью V; 1Ту - расстояние от оси вращения УАП до центра давления ДУАП.
Под действием момента Мт УАП начнет поворачиваться, а на ней возникнет аэродинамическая подъемная сила Yy, которая при допущении о нулевом угле атаки ЛА определяется выражением
. Yy CyV-c5-Sy-q,(4)
где Суд - производная по углу атаки коэффициента подъемной силы УАП; Sy - площадь УАП. Сила Yy направлена противоположно YT и приложена на плече lyy относительно оси вращения УАП. Поэтому она создает относительно этой оси момент Му
Му Yy ly,(5) направленный противоположно моменту Мт.
Очевидно, что после окончания пере- ходного процесса УАП повернется на такой угол (5, при котором будут равны противоположно направленные моменты Мт и Му .(6) Это выражение с учетом выражений (2)- (5) и допущений
Сут Суу ,(7) От - б
позволяет получить следующее соотношение между площадями 8т и Sy. обеспечивающее нормальное функционирование предложенного рулевого привода УАП:
ST lyy
(8)
Потребуем, как обычно, чтобы во всем диапазоне скоростей полета Л А, как на дозвуковых, так и на сверхзвуковых режимах, центр давления УАП находился позади оси вращения УАП. Тогда максимальное значение lyy можно оценить следующим соотношением
1УУ (0,2+0,25) Icaxy ,(9) где Icaxy- средняя аэродинамическая хорда УАП.
Если обеспечить
ту (0,8+1) Icaxy,(Ю)
то с учетом выражений (8)-(10) имеет место соотношение
ST (0,2+0,25) Sy,(11) т.е. в предложенном рулевом приводе УАП площадь ДУАП, а следовательно, и его размеры могут быть в 4-5 раз меньше площади (размеров) УАП.
При отклонении ДУАП рулевая машина предложенного рулевого привода УАП создает момент Мрт, максимальное значение которого должно быть равно максимальному значению МШт max шарнирного момента Мшт, который создается силой YT относительно оси вращения ДУАП.
Мшттах Сут СИттах ST Q I шт (12)
где «ттах максимальное значение угла атаки ДУАП; Шт - расстояние от оси вращения ДУАП до его центра давления.
В рулевом приводе, рассматриваемом в качестве прототипа, рулевая машина при отклонении УАП должна создавать момент Мру, максимальное значение Мрутах которого равно максимальному значению Му шарнирного момента УАП, которое в соответствии с выражениями (4) и (5) определяется выражением
Мутах Суд Отах Sy q 1уд, (13)
где бтах - максимальный угол отклонения УАП.
Так как
Мрттах Мшттах,
Мрутах Мутах.
то с учетом выражений (8), (12), (13), допущения (7) и допущения ССттах тах
получим
Мрттах шт
Мрутах lyy
Потребуем, чтобы во время диапазона скоростей полета ЛА, как на дозвуковых, так и на сверхзвуковых режимах, центр давления ДУАП находился позади его оси вращения. Тогда максимальное значение Шт можно оценить соотношением
1шт(0,2+0,25)сахт,(15) где icaxr - средняя аэродинамическая хорда ДУАП. Допустим, что значения Сахт и Сах находятся в таком же соотношении (11), что и площади ST и Sy ДУАП и УАП, т.е.
1сахт(0,2+025)1саху .(16)
Тогда с учетом выражений (10), (14), (15),
0 (16) получим .
МрТтах(0,04-Ю,Об25)Мрута с ,(17) т.е. максимальное значение момента, создаваемого рулевой машиной предлагаемого рулевого привода, в 16-20 раз меньше мак5 симального значения момента, создаваемого рулевой машиной рулевого привода, рассматриваемого в качестве прототипа.
Мощность, развиваемая рулевой машиной, равна произведению создаваемого ею
0 момента на угловую скорость вращения той аэродинамической поверхности, с осью которой механически связан выходной вал рулевой машины. Поэтому, если даже допустить, что потребная угловая скорость
5 поворота ДУАП рулевой машины предло женного рулевого привода вдвое больше потребной угловой скорости поворота УАП рулевой машиной рулевого привода, рассматриваемого в качестве прототипа, то и в
0 этом случае потребная мощность рулевой машины предложенного рулевого привода в 8-10 раз меньше потребной мощности рулевой машины привода, рассматриваемого в качестве прототипа. Потребная мощность
5 рулевой машины определяет ее размеры, а следовательно, и массу, а также запас энергии на борту ЛА, необходимой для работы рулевой машины в течение времени полета Л А. Следовательно, при прочих равных ус0 ловиях существенное уменьшение потребной мощности рулевой машины предложенного рулевого привода по сравнению с потребной мощностью рулевой машины рулевого привода, рассматриваемого в качестве прототипа, приведет к существенному уменьшению размеров и массы рулевой машины предложенного рулевого привода УАП и запаса энергии на борту ЛА, необходимой для работы этой рулевой ма0 шины, по сравнению с теми же ее характеристиками рулевого привода, рассматриваемого в качестве прототипа.
Проведенные исследования показали, что для обеспечения устойчивой работы
5 предложенного рулевого привода УАП и малого значения постоянной временитрп этого рулевого привода,которое обуславливает высокое быстродействие отклонения УАП на заданный угол предложенным рулевым
.приводом УАП, необходимо иметь в этом приводе отрицательные обратные связи по
угловой скорости б и угловому ускорению
5 вращения УАП относительно корпуса ЛА. Для реализации этих отрицательных обратных связей в состав предложенного ру-. левого привода УАП введены датчик угловой
скорости (ДУС) 6 поворота УАП и датчик
углового ускорения (ДУУ) 6 поворота УАП относительно корпуса ЛА. ДУС измеряет угловую скорость б поворота УАП, и электрический сигнал Da, пропорциональный б,
U2--KV -б(18) с выхода ДУС поступает на третий вход суммирующего усилителя ДУУ, измеряет угловое ускорение б поворота УАП, и электрический сигнал УЗ, пропорциональный б ,
.. ,
: -б. ; (19) с выхода ДУУ поступает на четвертый вход суммирующего усилителя, В результате этого на выходе суммирующего усилителя действует электрический сигнал
(UBx+Ui+U2+U3),(20) где Key- коэффициент усиления суммирующего усилителя,
Uex входной сигнал привода, пропорциональный заданному углу 5з отклонения УАП
(21) и поступающий на первый вход суммирующего усилителя,
DI - электрический сигнал с выхода ДУ, пропорциональный углу 5 отклонения УАП
-б(22) и поступающий на второй вход суммирующего усилителя,
К - коэффициент усиления ДУ..
Наличие в сигнале UCy составляющих -Ка 5 и -Кз .-б обеспечивает устойчивую работу предлагаемого рулевого привода УАП и малое значение его постоянной времени грп , что обуславливает высокое быстродействие предлагаемого рулевого привода при отклонении УАП на заданный угол бз .
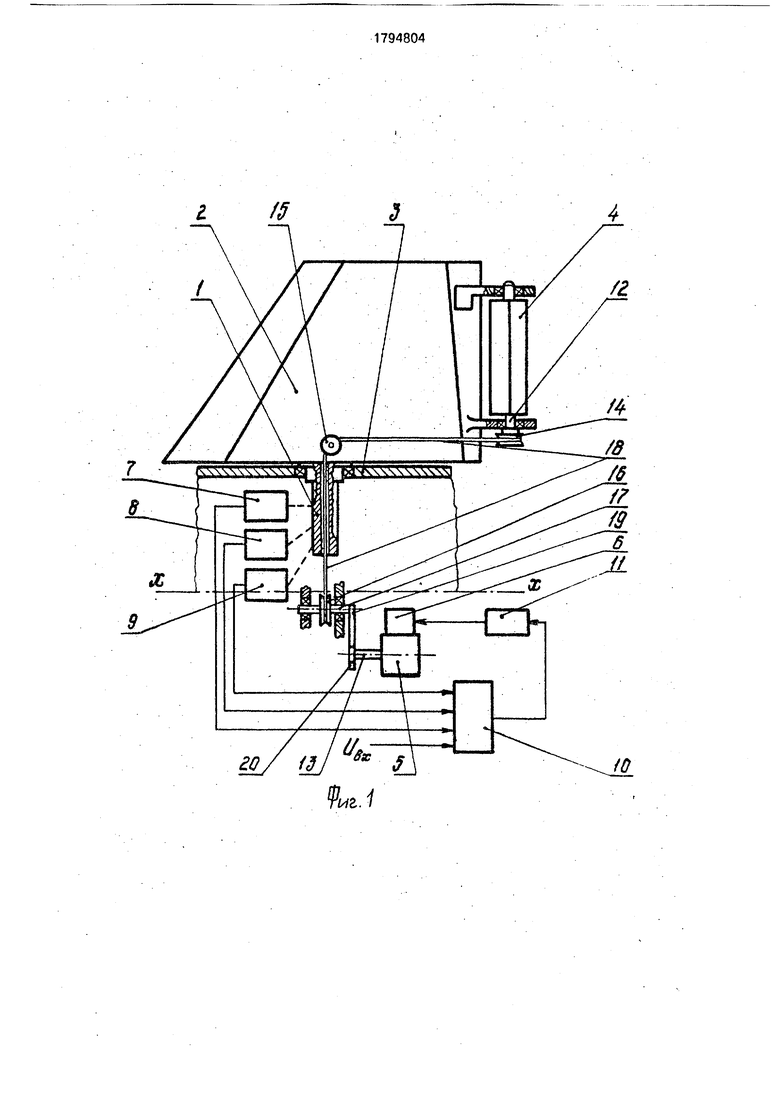
Сущность изобретения поясняется конструктивно-функциональной схемой рулевого привода УАП, показанной на фиг. 1, где 1 - ось управляемой аэродинамической поверхности (УАП), 2 - УАП; 3 - корпус ЛА; 4 - дополнительная управляющая аэродинамическая поверхность (ДУАП); 5 - рулевая машина; б - управляющее звено рулевой
машины; 7 - датчик угла (ДУ) поворота УАП; 8 - датчик угловой скорости (ДУС) поворота УАП; 9 - датчик углового ускорения (ДУУ) поворота УАП; 10 - суммирующий усилитель; 11 - усилитель мощности; 12 - ось
ДУАП; 13- выходной вал рулевой машины; 14 - ведомый ролик; 15 - промежуточный ролик; 16 - ведущий ролик; 17 - вал; 18 - тросовая проводка; 19 -зубчатый сектор; 20
- шестерни; 21 - входной электрический
сигнал рулевого привода, Пунктирными линиями показаны механические связи ДУ 7, ДУС 8 и ДУУ 9 с осью 1 УАП 2. X-Х - продольная ось ЛА.
Устройство предлагаемого рулевого
привода УАП состоит .в следующем. Ось 1 УАП 2 установлена в корпусе ЗЛА с возможностью вращения, На УАП 2 в области ее задней кромки установлена дополнительная управляющая аэродинамическая поверхность (ДУАП) А с возможностью вращения относительно УАП. 2 вокруг оси, параллельной оси 1 УАП 2. Внутри корпуса 3 Л А установлены рулевая машина 5 с управляющим звеном б, ДУ 7, ДУС 8, ДУУ 9, суммирующий
усилитель 10 и усилитель мощности 11. Ось 12 ДУАП 4 механически связана с выходным валом 13 рулевой машины 5 посредством ведомого ролика 14, закрепленного на оси 12 ДУАП 4, двух промежуточных роликов 15,
установленных на УАП 2 с возможностью их вращения, ведущего ролика 16, закрепленного на валу 17, который установлен в корпусе ЛА с возможностью вращения, тросовой проводки 18 между роликами 14 и
16 через ролики 15, зубчатого сектора 19, закрепленного на валу. 17, и шестерни 20,
закрепленной на выходном валу 13 рулевой машины 5. ДУ 7 механически связан с осью
I УАП 2 и электрически связан со вторым входом суммирующего усилителя 10. ДУС 8 механически связан с осью 1 УАП 2 и электрически связан с третьим входом суммирующего усилителя 10. ДУУ 9 механически связан с осью 1 УАП 2 и электрически связан с четвертым входом суммирующего усилите- . ля 10. Выход суммирующего усилителя 10 электрически связан с входом усилителя мощности 11, а выход усилителя мощности
II электрически связан с входом управляю- щего звена 6 рулевой машины 5.
При рассмотрении работы предложенного рулевого привода УАП 2 в динамике в качестве исходного состояния привода примем установившийся режим его работы, при
котором на первом входе суммирующего усилителя 10 действует напряжение ,
УАП 2 неподвижна и имеет нулевой угол отклонения «5 0,
ДУАП 4 неподвижна и имеет нулевой угол отклонения. (5т 0.
В этом случае на выходе ДУ 7 действует нулевой электрический сигнал Ui (22)
,
на выходе ДУС 8 действует нулевой электрический сигнал U2 (18)
.
и на выходе ДУУ 9 действует нулевой электрический сигнал Us (19)
.
Сигналы Ui, 1)2, Уз поступают соответственно на второй, третий четвертый входы суммирующего усилителя 10, в результате чего на выходе суммирующего усилителя 10 действует нулевой электрический сигнал Ucy(20)
,
который поступает на вход усилителя мощности 11 и вызывает нулевой электрический сигнал на его выходе
.
поступающий на вход управляющего звена 6 рулевой машины 5, в результате чего выходной вал 13 рулевой машины 5 будет неподвижным.
Пусть в момент времени п потребовалось отклонить УАП 2 на некоторый заданный угол (5з 0, а именно .
(5з 0.Поэтому в соответствии с выражением (21) на первом входе суммирующего усилителя 10 при t ti будет действовать электрический сигнал
UBX 0. .
Так как УАП 2 пока остается неподвижной, то на других входах суммирующего усилителя будут действовать нулевые сигналы Ui, U. и Оз, и на выходе суммирующего усилителя 10 появится сигнал
Ucy О,
который после усиления усилителем мощности 11 вызовет появление положительного электрического сигнала UM на входе управляющего звена 6 рулевой машины 5
UM 0.
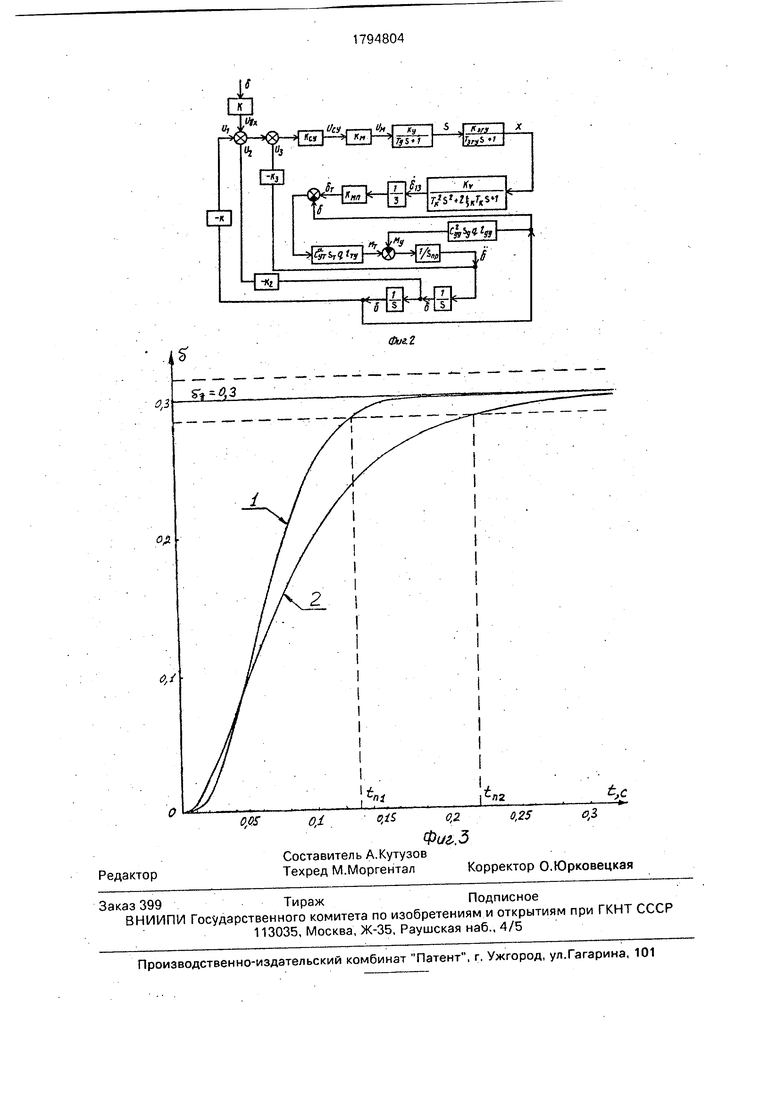
Динамика процессов, протекающих в управляющем звене 6 и рулевой машине 5, которую для определения примем гидравлической, описывается следующей математической моделью
1(КУ -UM-I).
Х3 тД- (Кэгу -I -Х3),(23) ЭГУ
Ti- 5i3+2Јk -Tk -c5i3+ 5i3 Kv Хз,
.
где (5is , , (5i3 - скорость ускорения и производная от ускорения движения выходного вала 13 рулевой машины 5,
Kv, Тк, Јk коэффициент усиления, постоянная времени и декремент затухания коле- бательного звена, моделирующего процессы, происходящие в рулевой машине 5, выходом которых является скорость
5i3 выходного вала 13 рулевой машины 5,
Кд, Ту - коэффициент усиления и постоянная времени электрических элементов уп- равляющего звена 6;
Кэгу, Тэгу - коэффициент усиления и постоянная времени электрогидравличе- ского усилителя (ЭГУ), который входит в состав управляющего звена 6; I - ток на входе ЭГУ;
Хз - перемещение золотника ЭГУ. Выражения (23) показывают,что при UM 0 выходной вал 13 рулевой машины 5 начнет
двигаться со скоростью 5i3 0. Это движение выходного вала 13 через зубчатое зацепление шестерни 20 с сектором 19 приведет к повороту вала 17 и ведущего ролика 1 б, что в свою очередь через тросовую проводку 18
приведет к повороту ведомого ролика 14 и ДУАП 4 на угол
(.
Пусть вектор скорости ЛА направлен на его продольной оси X-Х. Тогда в соответствии с выражением (1) при 5т 0 и д О ДУАП 4 окажется под углом атаки Of - 5Г 0, что приведет к созданию на ДУАП 4 положительной подъемной силы YT (2) и положительного момента Мт(3) этой силы
относительно оси вращения УАП 2, под действием которого УАП 2 начнет вращаться с
угловым ускорением 6 , определяемым выражением
5
1
пр
(Мт-Му).
(24)
где 1.пр момент инерции УАП 2 и связанных с ней деталей. В результате этого появятся
угловая скорость с5 0 и угол поворота д 0 УАП 2.
В результате поворота УАП 2 на угол б О создается подъемная сила Yy (4) и момент My (5) этой силы относительно оси вращения
111794804 12 . .
УАП 2 и уменьшается .угол атаки ат ДУАП 2.щадь, длина, высота УАП 2 и расстояние от
Все это приводит к уменьшению угловогопередней кромки УАП 2 до оси ее вращения;
ST, IT.hT, let -площадь, длина, высота ДУАП
ускорения 6 УАП 2.4 и расстояние от передней кромки ДУАП 4
В результате измерения значений5 до оси ее вращения. Расстояние между ося$ 1 :ми вращения УАП 2 и ДУАП 4 составляет
0,о и о соответствующими датчиками нао407м
выходах ДУ. 7, ДУС 8 и ДУУ9 появляются Рассматривалась работа рулевого приэлектрические сигналы Ui (22). U2 (18) и U3вода доя двух режимов полета ЛА: 1) полет
19 .которые в соответствии с выражением10 у земли с дозвуковой скоростью; 2) полет на
(20). зависимостью большой высоте со сверхзвуковой скороим Км Ucy (25)стью. Значения скорости V, высоты Н, плоти выражениями (23) приводят к уменьшениюности B03AyXa р , скоростного напора q,
скорости 5i3 выходного вала 13 рулевой ма-числа М, производных Сут С .расстоя- шины 5 и скорости вращения ДУАП 4.ний lyy, ту между осью вращения УАП 2 и
Поворот ДУАП 4 будет происходить доточками приложения.аэродинамических сил
тех пор. пока после окончания переходногоYy (4) и YT (2). а также расстояние Шт между
- осью вращения ДУАП 4 и точкой приложепроцесеа ( д .р -0) наступит равенство. Ния силы YT (2) для этих режимов полета и
5 5з , т.е. УАП 2 отклонится на заданный20 приведены в таблице 2.
угол 5з. При этом ДУАП 4 отклонится отно-При моделировании принимались слесительно УАП 2 на такой угол 0V, чтобы придующие значения коэффициентов и парауголеатакиСт ДУАП 4, определяемом выра-метров, использующихся в математической
жениём„модели предложенного рулевого привода:
«г дт-оз,b К 75В;К21 ЗВс;Кз1 0.125Вс2;Ксу
выполнялось равенство (6) моментов Мт ,02 АВ ; ,1 см ,6c ,
My сил Yf(2) и Yy (4) относительно оси вра-КМп 120; Ту 0,7 с; Тэгу 2-10 Зс,
щенияУАП2. ,Тк 1 102с; |k 0,2; ,147 кг- м2;
Таким образом, предложенный рулевой«п з 0,3. Численное интегрирование системы
привод выполняет задачу отклонения УАП 2дифференциальных уравнений (23), (24) прона заданный угол бз при сравнительно не-водилось методом Рунге-Кутта с шагом 0,0001
большой мощности рулевой машины 5, такс при следующих начальных условиях
как эта рулевая машина отклоняет ДУАП 4, i -1
имеющую небольшую площадь и малый«с 5(о) От(ь) 0, о ,(to)OC ; l(t0)OA;
шарнирный момент, и при довольно высо-w . . , . п J. . . -. .-., ,
ком быстродействии, которое обеспечива- -nr Mto)0,c5i3(to)OC ,613 (t0)
ется наличием в приводе отрицательныхОС. , to ОС.
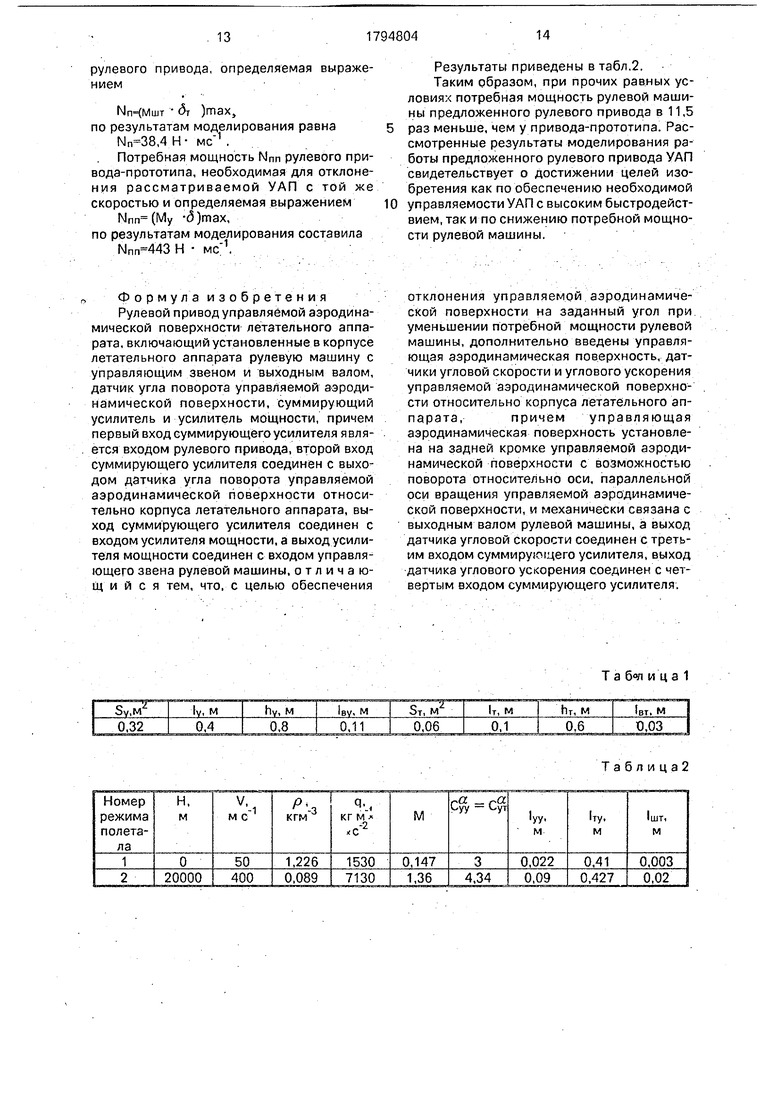
обратных связей по угловой скорости и уг-Результаты моделирования показаны левому ускорению поворота УАП 2. Для ко-ап на фиг.З. График 1 представляет зависи- личественной оценки значений потребной40 мость 5(г)дяя первого режима полета ЛА мощности рулевой машины 5 предложенно-ПРИ М-0,147, а график 2 - зависимость д (t) го рулевого привода и постоянной времени«ля второго режима полета ЛА при ,36. этого привода, характеризующей его быст-Пунктирными линиями на фиг.З показаны родействие при отклонении УАП, было про-,R границы зоны + 5% от(5з , при входе в кото- ведено моделирование. работыРУю графика 5(t) с последующим на выходе предложенного рулевого привода.Дляопре-этого графика из нее переходный процесс деленности рассматривался рулевой при-считается закончившимся. Анализ графиков вод с гидравлической рулевой машиной,Ч и 2 показывает, что в зависимости от ре- математической моделью которого являют-цп жима полета ЛА переходный процесс откло- ся выражения (18)...(25), (1)...(5) и выражениене«ия УАП на заданный угол предложенным от , (26)рулевым приводом заканчивается за время где Кмп - коэффициент усиления механиче-101 0,1.3 с. ,22с, ской передачи от выходного вала 13 рулевойа постоянная времени трп этого привода из- машины 5 к ведомому ролику 14, закреплен-ее меняется в пределах ному на оси 12 ДУАП 4.грп (0,04-0.07) с.
При моделировании рассматривалисьцто свидетельствует о высоком быстродейУАП 2 и ДУАП 4 прямоугольной формы вствим привода. При этом потребная мощплане, размеры которых приведены вность Nn рулевой машины предложенного табл.1, где обозначено Sy, ly, hy, 1Ву - плорулевого привода, определяемая выражением
Мп-(Мшт 5т )тах} по результатам моделирования равна
,4H- .
Потребная мощность Nnn рулевого привода-прототипа, необходимая для отклоне- ния рассматриваемой УАП с той же скоростью и определяемая выражением
Мпп(Му -б)тах, по результатам моделирования составила
Н мс
-1
Результаты приведены в табл.2.
Таким образом, при прочих равных условиях потребная мощность рулевой машины предложенного рулевого привода в 11,5 раз меньше, чем у привода-прототипа. Рассмотренные результаты моделирования работы предложенного рулевого привода УАП свидетельствует о достижении целей изобретения как по обеспечению необходимой управляемости УАП с высоким быстродействием, так и по снижению потребной мощности рулевой машины.

| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1993 |
|
RU2072311C1 |
| СПОСОБ ПОВОРОТА УПРАВЛЯЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2193992C2 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1994 |
|
RU2090446C1 |
| АЭРОДИНАМИЧЕСКАЯ СХЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2093417C1 |
| Регулятор амплитуды колебаний в контуре управления направлением движения летательного аппарата | 2022 |
|
RU2788621C1 |
| ДЕМПФЕР РЫСКАНИЯ САМОЛЕТА | 1999 |
|
RU2194650C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ШАРНИРНОГО МОМЕНТА РУЛЕВЫХ ОРГАНОВ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ИСПЫТАНИИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243526C1 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2461041C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
Изобретение относится к области рулевых приводов аэродинамических поверхно2 стей летательных аппаратов и может быть использовано при создании новых и модернизации старых летательных аппаратов. Целью изобретения является обеспечение заданного угла поворота управляемой аэродинамической поверхности при уменьшении потребной мощности рулевой шины. Для достижения поставленной цели в привод вводится дополнительная управляющая аэродинамическая поверхность, механически соединенная с выходным валом рулевой машины, и датчики скорости и ускорение управляемой аэродинамической поверхности, механически с ней связанные. 3 ил. 2 табл.
Формула изобретения Рулевой привод управляемой аэродинамической поверхности летательного аппарата, включающий установленные в корпусе летательного аппарата рулевую машину с управляющим звеном и выходным валом, датчик угла поворота управляемой аэродинамической поверхности, суммирующий усилитель и усилитель мощности, причем первый вход суммирующего усилителя является входом рулевого привода, второй вход суммирующего усилителя соединен с выходом датчика угла поворота управляемой аэродинамической поверхности относительно корпуса летательного аппарата, выход суммирующего усилителя соединен с входом усилителя мощности, а выход усилителя мощности соединен с входом управляющего звена рулевой машины, отличающийся тем, что. с целью обеспечения
отклонения управляемой аэродинамической поверхности на заданный угол при уменьшении потребной мощности рулевой машины, дополнительно введены управляющая аэродинамическая поверхность, датчики угловой скорости и углового ускорения управляемой аэродинамической поверхности относительно корпуса летательного аппарата,причем управляющая аэродинамическая поверхность установлена на задней кромке управляемой аэродинамической поверхности с возможностью поворота относительно оси, параллельной оси вращения управляемой аэродинамической поверхности, и механически связана с выходным валом рулевой машины, а выход датчика угловой скорости соединен с третьим входом суммирующего усилителя, выход датчика углового ускорения соединен с четвертым входом суммирующего усилителя.
Т а и ц а 1
Таблиц а 2
| Костин С.В., Петров Б.И. | |||
| Чашынин Н.С | |||
| Рулевые приводы | |||
| М.: Машиностроение, 1973, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU102A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Костин С.В., Петров Б.И,, Чашынин Н.С | |||
| Рулевые приводы | |||
| М.: Машиностроение, 1973, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
