зона скоростей. Блоками 22, 23 нелинейной коррекции осуществляется компенсация кинематическом погрешности, обусловленной колебаниями гидроцилиндров 7, 8 вокруг своих опор 13, }k. Наличие дополнительных внутренних контуров регулирования усилия на штоках 5, 6 гидроцилиндров 7, 8 выравнивает характеристики каналов управления. Суммарное усилие двух гидроцилиндров 7, 8 на выходном коленчатом
валу направлено по касательной к окружности вращения центров шарниров на концах штоков 5, 6 и формируется путем сравнения в сумматоре 19 сигнала задатчика и датчиков 10, 11 углового положения и угловой скорости, а также сравнения в блоках 26, 27 сравнения сигналов с выходов блоков 2k, 25 умножения с сигналами датчиков 17, 18 перепада давления на гидроци- пиндрах 7, 8. 1 з.п. ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ПНЕВМО- ИЛИ ГИДРОПРИВОД ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2473822C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПРИВОДНОГО ВАЛА СЛЕДЯЩЕГО ПНЕВМО- ИЛИ ГИДРОПРИВОДА | 2009 |
|
RU2472978C2 |
| Устройство для управления погрузочным манипулятором | 1983 |
|
SU1446598A1 |
| Электрогидравлический загружатель | 1979 |
|
SU830017A1 |
| Электрогидравлический вибростенд | 1979 |
|
SU862017A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2013 |
|
RU2523160C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ОШИБКИ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА В КОД | 2020 |
|
RU2740511C1 |
| Устройство для бескопирной обработки деталей с равноосным контуром на металлорежущих станках | 1976 |
|
SU599960A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ С МАШИННО-ДРОССЕЛЬНЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2815567C1 |
Изобретение касается гидроавтоматики и может быть использовано в системах управления испытательных стендов. Целью изобретения является повышение надежности, точности, долговечности и плавности и расширение диапазона скоростей. Блоками 22, 23 нелинейной коррекции осуществляется компенсация кинематической погрешности, обусловленной колебаниями гидроцилиндров 7, 8 вокруг своих опор 13, 14. Наличие дополнительных внутренних контуров регулирования усилия на штоках 5, 6 гидроцилиндров 7, 8 выравнивает характеристики каналов управления. Суммарное усилие двух гидроцилиндров 7, 8 на выходном коленчатом валу направлено по касательной к окружности вращения центров шарниров на концах штоков 5, 6 и формируется путем сравнения в сумматоре 19 сигнала задатчика и датчиков 10, 11 углового положения и угловой скорости, а также сравнения в блоках 26, 27 сравнения сигналов с выходов блоков 24, 25 умножения с сигналами датчиков 17, 18 перепада давления на гидроцилиндрах 7, 8. 1 з.п. ф-лы, 2 ил.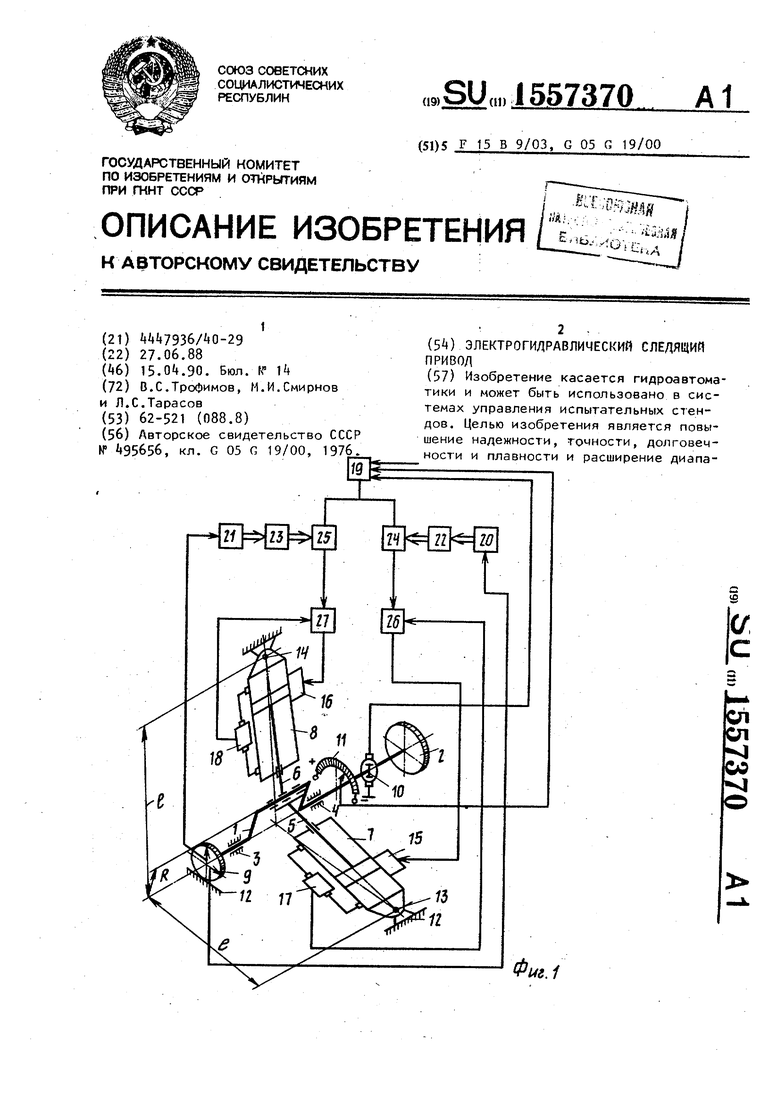
Изобретение относится к гидроавтоматике и может быть использовано в системах управления испытательных стендов.
Цель изобретения - повышение надежности, точности, долговечности и плавности и расширения диапазона скоростей.
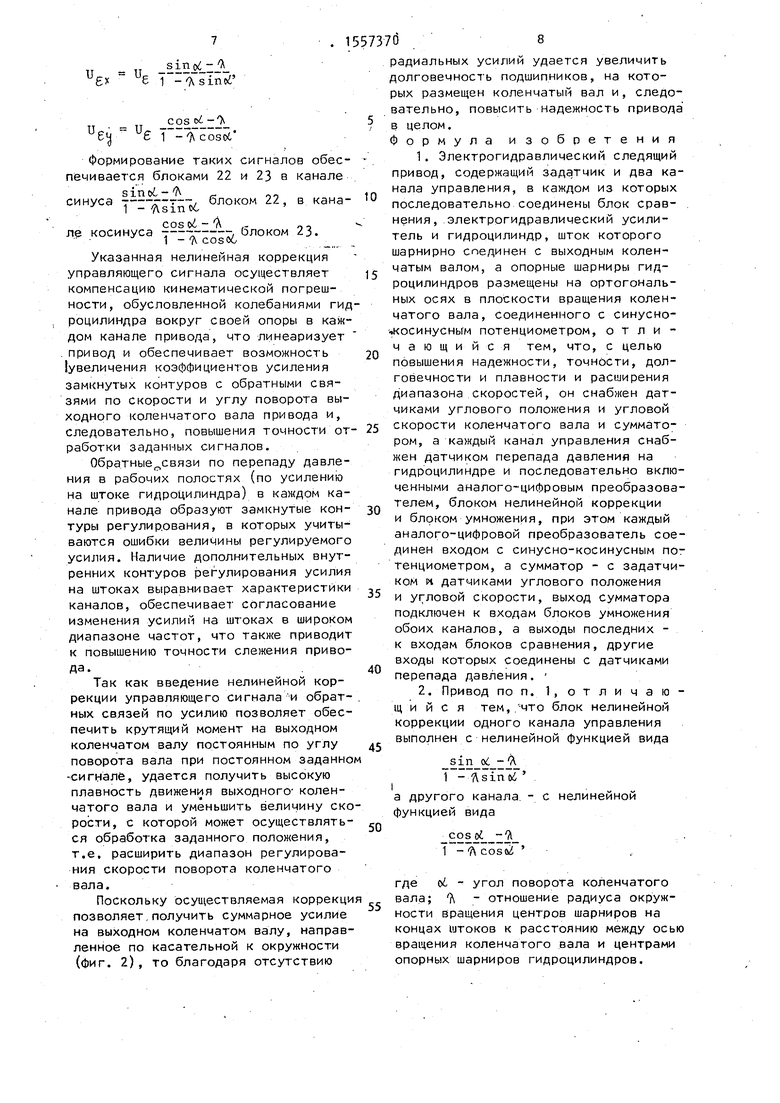
На фиг. 1 изображена принципиальная схема; на фиг. 2 - кинематическая схема электрогидравлического следящего привода.
Привод содержит задатчик (не изображен) , выходной коленчатый вал 1 с нагрузкой 2, установленный в подшипниковых опорах 3, k и шарнирно соединенный со штоками 5, 6 гидроцилиндров 7, 8.
На валу 1 установлены синусно-ко- синусный потенциометр 9, датчик 10 угловой скорости и датчик 1i угловог положения, закрепленные на общем основании 12. Гидроцилиндры 7 и 8 также закреплены на основании 12 с помощью опорных шарниров 13 и 1 t, расположенных на ортогональных осях в плоскости вращения вала 1. Непосредственно на гидроцилиндрах 7 и 8 установлены электрогидравлические усилители 15 и 16 и датчики 17 и 18 перепада давления в рабочих полостях (не обозначены) гидроцилиндров 7, 8 соответственно, сигналы которых пропорциональны усилиям, развиваемым на штоках 5, 6.
Входы сумматора 19 связаны соответственно с задатчиком, датчиком 11 углового положения и датчиком 10 угловой скорости поворота выходного коленчатого вала 1.
Устройство содержит также два канала управления с последовательно
0
5
0
0
5
0
5
соединенными аналого-цифровыми преобразователями (АЦП) 20 и 21, соответственно блоками 22 и 23 нелинейной коррекции, блоками 2k и 25 умножения (в качестве которых могут быть включены цифроаналоговые преобразователи), и блоками 26 и 27 сравнения соответственно. Входы АЦП 20 и 21 подключены к соответствующему (синусно-косинус- ному) выходу синусно-косинусного потенциометра 9, вторые входы блоков 2k, 25 подключены к выходу сумматора 19, вторые входы блоков 26 и 27 подключены к выходам датчиков 17 и 18, а выходы - к управляющим входам усилителей 15 и 16 соответственно. При этом датчик 17 АЦП 20, блоки 22, 2k и 26 образуют канал управления гидроцилиндром 7 (канал синуса),датчик 18 АЦП 21, блоки 23, 25 и 27 - соответственно гидроцилиндром 8 (канал косинуса). Блоки 2k, 25 служат для формирования сигналов коррекции и могут быть выполнены, например, на постоянных запоминающих устройствах с нелинейными функциями вида
sinoC- /Л
- для канала синуса и
cos oi. - Д
-Ticosct ДЯЯ канал/9 косинуса;
где об угол поворота выходного коленчатого вала; А - отношение радиуса окружности вращения центров шарниров (не обозначены) на концах штоков 5 и 6 гидроцилиндров к расстоянию между осью вращения выходного коленчатого вала 1 и центрами опорных шарниров 13 и Ik гидроцилиндров 7 и 8.
Сумматор 19 может быть выполнен, например, на операционном усилителе,
при этом выходы датчиков 10 и 11 сое динены с его инвертирующими входами, а задатчик - с неинвертирующим входом.
Электрогидравлический следящий привод работает следующим образом.
На вход сумматора 19 поступает управляющий сигнал задатчика, из которого вычитаются сигналы, пропорци- ональные углу и скорости выходного вала 1 (эта обратная связь обеспечивает формирование управляющего сигнала, стабилизирует и линеаризует систему, повышая ее точность и плав- ность отработки входного сигнала).
Суммарная ошибка Uc на выходе сумматора 19 является управляющим сигналом для каналов управления привода .
Поступая в блоки 2k и 25 умножени суммарная ошибка UЈ перемножается с сигналами, сформированными в блоках 22 и 23 нелинейной коррекции из сигналов, поступающих через соответству ющий АЦП 20 и 21 от потенциометра 9, установленного на коленчатом валу 1, и пропорциональных sin л, и cos об .
После перемножения полученные на выходах блоков .k и 25 сигналы срав- ниваются в блоках 26 и 27 с сигналам поступающими с датчиков 17 и 18, и сигналами (ошибки рассогласования) с выходов блоков 26 и 27, при этом осуществляется управление усилителями 15, 16.
В зависимости от величины и знака ошибки рассогласования усилители 15 и 16 подают рабочую жидкость в соответствующие полости гидроцилиндров 7 и 8.
Под воздействием усилий от перепада давления в рабочих полостях штоки 5, 6 совершают возвратно-поступательное движение. В результате сложения на коленчатом валу 1 возникает крутящий момент, под действием которого коленчатый вал совершает поворотное
движение. Для обеспечения заданного крутящего момента на коленчатом валу законы изменения усилий на штоках исполнительных элементов должны обес
печить суммарное усилие F
охр
направленное по касательной к окружности, описываемой коленом коленчатого вала (как в статике, так и в динамике), величина которого не должна зависеть .от угла поворота коленчатого валаГ Как видно из фиг. 2, для этрго необ
обеспечить усилия 5, 6
к
И,7
F Fxsin(«i+p)+Fgsin((A/J ); Fxcos(oi+p) (),
(1) (2)
где
И 90°
Fn
ca (3) и F
f
- oi , ft , jb углы поворота штоков 5, 6 относительно горизонтальной и вертикальной осей. Из (1) и (2) получаем Рй
-г ЈЙм&- ЯЛЯ Канала
cos(oi+ Р)
ч -c-0-s-( ка
нала косинуса (А), при этом для реализации выражений (3, 4) осуществляется измерение углов. Так как cos(ft+) 1, то выражения (3) и (4) принимают вид F FOKp cos(ot+ p) и Fx FoKp соз(оЈ + рЪ. Подставляя выражения косинусов углов (Ј + /3) и () , получим выражения усилий на штоках 5, 6, которые необходимо сформировать для выполнения выше указанных условий:
Fv F
sin oi - Tl
окр
ф - ZflsinoC+A
cos oi - /
ц гокр Ia
2-Acos +V
F,, F,
U,
Здесь ft - отношение радиуса R окружности вращения центров шарниров на концах штоков 5, 6 к расстоянию 1 между осью вращения выходного коленчатого вала 1 и центрами опорных шарниров 13, 1.
Поэтому выражения UЈ)C , Ugi Управляющих сигналов в каналах управления имеют вид
0
U,
ех
ис
ис
sin oЈ - Л
Je иб
ф - 2ftsino6+ A2cos pd -
-ф - 2flcos oL + К
При разложении в ряд Тейлора (с точностью до 0,5% при изменении угла поворота коленчатого вала 1 от Of до 360°) получим выражения для управляющих сигналов на входах усилителей 15,16
и
6 1 - Asinoi
U
Ј - cosci
Формирование таких сигналов обеспечивается блоками 22 и 23 в канале
sinci- A -„„
синуса блоком 22, в канаcos оЈ - А ,-00
ле косинуса т™ТU Ьлоком 23.
Указанная нелинейная коррекция управляющего сигнала осуществляет компенсацию кинематической погрешности, обусловленной колебаниями гидроцилиндра вокруг своей опоры в каждом канале привода, что линеаризует привод и обеспечивает возможность {увеличения коэффициентов усиления замкнутых контуров с обратными связями по скорости и углу поворота выходного коленчатого вала привода и.
10
15
20
Формула изобретения 1. Электрогидравлический следящий привод, содержащий задатчик и два ка нала управления, в каждом из которых последовательно соединены блок сравнения, электрогидравлический усилитель и гидроцилиндр, шток которого шарнирно соединен с выходным коленчатым валом, а опорные шарниры гидроцилиндров размещены на ортогональных осях в плоскости вращения коленчатого вала, соединенного с синусно- косинусным потенциометром, отличающийся тем, что, с целью повышения надежности, точности, долговечности и плавности и расширения диапазона скоростей, он снабжен датчиками углового положения и угловой
30
35
40
следовательно, повышения точности от- 25 скорости коленчатого вала и суммато- работки заданных сигналов.
Обратные связи по перепаду давления в рабочих полостях (по усилению на штоке гидроцилиндра) в каждом канале привода образуют замкнутые контуры регулирования, в которых учитываются ошибки величины регулируемого усилия. Наличие дополнительных внутренних контуров регулирования усилия на штоках выравнивает характеристики каналов, обеспечивает согласование изменения усилий на штоках в широком диапазоне частот, что также приводит к повышению точности слежения привода.
Так как введение нелинейной коррекции управляющего сигнала и обратных связей по усилию позволяет обеспечить крутящий момент на выходном коленчатом валу постоянным по углу поворота вала при постоянном заданном -сигнале, удается получить высокую плавность движения выходного- коленчатого вала и уменьшить величину скорости, с которой может осуществляться обработка заданного положения, т.е. расширить диапазон регулирования скорости поворота коленчатого
вала.
Поскольку осуществляемая коррекция позволяет получить суммарное усилие
на выходном коленчатом валу, направленное по касательной к окружности
(фиг. 2), то благодаря отсутствию
45
50
55
ром, а каждый канал управления снабжен датчиком перепада давления на гидроцилиндре и последовательно вклю ченными аналого-цифровым преобразова телем, блоком нелинейной коррекции и блоком умножения, при этом каждый аналого-цифровой преобразователь сое динен входом с синусно-косинусным по тенциометром, а сумматор - с задатчи ком и датчиками углового положения и угловой скорости, выход сумматора подключен к входам блоков умножения обоих каналов, а выходы последних - к входам блоков сравнения, другие входы которых соединены с датчиками перепада давления.
sin( Т г flsin&i
а другого канала - с нелинейной функцией вида
jL 1 - ft cosfci
где od - угол поворота коленчатого вала; А - отношение радиуса окружности вращения центров шарниров на концах штоков к расстоянию между осью вращения коленчатого вала и центрами опорных шарниров гидроцилиндров.
5
0
радиальных усилий удается увеличить долговечность подшипников, на которых размещен коленчатый вал и, следовательно, повысить надежность привода в целом.
Формула изобретения 1. Электрогидравлический следящий привод, содержащий задатчик и два канала управления, в каждом из которых последовательно соединены блок сравнения, электрогидравлический усилитель и гидроцилиндр, шток которого шарнирно соединен с выходным коленчатым валом, а опорные шарниры гидроцилиндров размещены на ортогональных осях в плоскости вращения коленчатого вала, соединенного с синусно- косинусным потенциометром, отличающийся тем, что, с целью повышения надежности, точности, долговечности и плавности и расширения диапазона скоростей, он снабжен датчиками углового положения и угловой
0
5
0
5 скорости коленчатого вала и суммато-
5
0
5
ром, а каждый канал управления снабжен датчиком перепада давления на гидроцилиндре и последовательно включенными аналого-цифровым преобразователем, блоком нелинейной коррекции и блоком умножения, при этом каждый аналого-цифровой преобразователь соединен входом с синусно-косинусным потенциометром, а сумматор - с задатчи- ком и датчиками углового положения и угловой скорости, выход сумматора подключен к входам блоков умножения обоих каналов, а выходы последних - к входам блоков сравнения, другие входы которых соединены с датчиками перепада давления.
sin( Т г flsin&i
а другого канала - с нелинейной функцией вида
jL 1 - ft cosfci
где od - угол поворота коленчатого вала; А - отношение радиуса окружности вращения центров шарниров на концах штоков к расстоянию между осью вращения коленчатого вала и центрами опорных шарниров гидроцилиндров.
(pus. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| /0 | |||
