Изобретение относится к гидроакустике и может быть использовано для измерения пеленга на источник звуковых волн в мелком море в пассивном режиме с помощью акустических приемников, установленных на морском дне, координаты которых и угловое положение считаются известными.
Известно устройство (Щуров В.А. Векторная акустика океана. Владивосток: Дальнаука, 2003. С.31) для измерения азимутального угла на источник звука в мелком море в пассивном режиме, содержащее установленные на дне приемник звукового давления и трехкомпонентный приемник вектора колебательной скорости, которые в совокупности образуют акустический комбинированный приемник, а также датчики углового положения локальной системы координат, связанной с акустическим приемником, относительно географической системы координат. В этом устройстве измеряются компоненты вектора интенсивности Ix, Iy в локальной ортогональной системе координат, связанной с акустическим комбинированным приемником, а направление на источник звука определяется по формуле

где φ - азимутальный угол в горизонтальной плоскости, отсчитываемый от оси Х локальной системы координат, связанной с акустическим комбинированным приемником. При необходимости результаты измерений углового положения источника звука в локальной системе координат пересчитываются в пеленг.
Недостатком данного измерительного устройства является большая погрешность измерения азимутального угла и пеленга, связанная с недостаточной направленностью акустического комбинированного приемника, которая является дипольной, и малая дальность действия, связанная с недостаточной помехоустойчивостью одиночного акустического комбинированного приемника.
Известно устройство (патент РФ на полезную модель №82972, МПК Н04В 10/00, 30.12.2008), в котором используется многоканальный цифровой комбинированный гидроакустический комплекс, содержащий n акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, а также систему сбора, обработки и отображения информации, содержащую блок сбора обработки и отображения информации, вход которого соединен с выходом оптического ресивера, устройство доступа к цифровым сетям передачи данных, вход которого соединен с выходом блока сбора обработки и отображения информации, и формирователь диаграммы направленности, вход и выход которого соединены со входом и выходом блока сбора обработки и отображения информации. Данное устройство является наиболее близким к заявленному изобретению и принято за прототип.
Недостатком этого устройства является невозможность значительного увеличения числа акустических комбинированных приемников и апертуры антенны из-за значительных дисперсионных искажений акустического сигнала при его распространении в мелком море. Вследствие таких искажений алгоритмы фазирования сигналов, принятых отдельными элементами антенны, которые положены в основу функционирования формирователя диаграммы направленности, и сам алгоритм определением азимутального угла на источник звука по формуле (1) становятся неэффективными. В результате дальность действия измерительной антенны не увеличивается, а погрешность измерения пеленга не уменьшается при увеличении апертуры антенны.
В основу настоящего изобретения поставлена задача увеличения дальности действия гидроакустического комплекса и уменьшения погрешности измерения азимутального угла и пеленга путем увеличения апертуры его измерительной системы. Для достижения поставленной цели предлагается использовать корреляционные свойства звукового поля по отношению к вертикальной компоненте вектора интенсивности. В соответствии с результатами работы (Щуров В.А., Кулешов В.П., Ткаченко Е.С. Вихри акустической интенсивности в мелком море. // Техническая акустика. 2010. №12. http://www.ejta.org) вертикальная компонента вектора интенсивности обладает явно выраженной периодической структурой в звуковом поле, создаваемом источником звука в мелком море на расстояниях, существенно превышающих размер ближней зоны rб=Н2/λ (Н - глубина моря, λ - длина волны на средней частоте рабочего диапазона частот). Это означает высокую коррелированность звуковых полей по отношению к вертикальной компоненте вектора интенсивности, измеренной в различных точках, разнесенных в пространстве на расстояния, существенно превышающие размер ближней зоны.
Для реализации поставленной задачи в гидроакустическом комплексе, содержащем n акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и отображения информации, содержащую блок сбора, обработки и отображения информации, вход которого соединен с выходом оптического ресивера, и устройство доступа к цифровым сетям передачи данных, вход которого соединен с выходом блока сбора, обработки и передачи информации, посредством трех акустических комбинированных приемников П1, П2, П3 образуется донная ортогональная база, в которой базовое расстояние Lx между приемниками П1, П2 ориентировано вдоль оси X, базовое расстояние Ly равно проекции расстояния между приемниками П1, П3 на ось Y локальной ортогональной системы координат, а базовые расстояния выбираются из условия Lx≥H2/λ, Ly≥H2/λ.
Кроме того, в систему сбора, обработки и отображения информации дополнительно введен трехканальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, первый блок вычисления функции взаимной корреляции К12(τ) сигналов, вход которого соединен с выходами первого и второго каналов блока вычисления вертикальной компоненты вектора интенсивности, второй блок вычисления функции взаимной корреляции К13(τ) сигналов, вход которого соединен с выходами первого и третьего каналов блока вычисления вертикальной компоненты вектора интенсивности, блок вычисления максимума функций взаимной корреляции, вход которого соединен с выходами блоков вычисления функций взаимной корреляции, блок вычисления азимутального угла на источник звука относительно оси X, вход которого соединен с выходом блока вычисления максимума функций взаимной корреляции, а выход соединен со входом устройства доступа к цифровым сетям передачи данных, причем функции взаимной корреляции вычисляются по формулам


а азимутальный угол на источник звука относительно оси Х локальной ортогональной системы координат вычисляется по формуле:

где τ=tx - временная задержка, соответствующая максимуму функции взаимной корреляции К12, τ=ty - временная задержка, соответствующая максимуму функции взаимной корреляции К13, с - предварительно определенная эффективная скорость звука в морской среде, Si(ω, ri)=p(ω, ri)Vz *(ω, ri) - спектральная плотность вертикального потока мощности, р(ω, ri), Vz(ω, ri)-Фурье - трансформанты звукового давления и вертикальной компоненты вектора колебательной скорости, ri - расстояние от источника звука до комбинированного акустического приемника Пi, ω0, 2Δω - средняя круговая рабочая частота и диапазон рабочих частот источника звука, Lx=(П1-П2), Ly=(П1-П3)sinθ, θ - угол между отрезками П1-П2 и П1-П3.
В заявляемом гидроакустическом комплексе общими существенными признаками для него и для его прототипа являются:
- n акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей;
- телеметрический блок, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером;
- система сбора, обработки и передачи информации, содержащая блок сбора, обработки и передачи информации, и устройство доступа к цифровым сетям передачи данных.
Сопоставительный анализ существенных признаков заявляемого гидроакустического комплекса и прототипа показывает, что первый в отличие от прототипа имеет следующие отличительные признаки:
- посредством трех акустических комбинированных приемников П1, П2, П3, образуется донная ортогональная база, в которой базовое расстояние Lx между приемниками П1, П2 ориентировано вдоль оси X, базовое расстояние Ly равно проекции расстояния между приемниками П1, П3 на ось Y локальной ортогональной системы координат, а базовые расстояния выбираются из условия  ,
,  ,
,
- трехканальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с входом блока сбора, обработки и отображения информации,
- первый блок вычисления функции взаимной корреляции К12(τ) сигналов, вход которого соединен с выходами первого и второго каналов блока вычисления вертикальной компоненты вектора интенсивности,
- второй блок вычисления функции взаимной корреляции К13(τ) сигналов, вход которого соединен с выходами первого и третьего каналов блока вычисления вертикальной компоненты вектора интенсивности,
- блок вычисления максимума функций взаимной корреляции, вход которого соединен с выходами блоков вычисления функций взаимной корреляции,
- блок вычисления азимутального угла на источник звука относительно оси X, вход которого соединен с выходом блока вычисления максимума функций взаимной корреляции, а выход соединен со входом устройства доступа к цифровым сетям передачи данных, причем функции взаимной корреляции вычисляются по формулам

а азимутальный угол на источник звука относительно оси Х локальной ортогональной системы координат вычисляется по формуле:

Таким образом, именно такая совокупность существенных признаков заявленного устройства позволяет создать гидроакустический комплекс для измерения азимутального угла на источник звука, уменьшить погрешность измерения и увеличить дальность действия самого комплекса при работе в мелком море.
Новизна заявляемого гидроакустического комплекса заключается в том, что в нем в качестве рабочего сигнала используется вертикальная компонента вектора интенсивности, которая обладает наибольшей пространственной коррелированностью в звуковом поле в мелком море в сравнении с сигналами горизонтальных компонент вектора интенсивности, которые используются в алгоритме (1). Именно эта особенность позволяет существенно увеличить базовые расстояния П1-П3, увеличить угловое разрешение, уменьшить погрешность определения азимутального угла на источник звука по формуле (2) и увеличить дальность действия всего устройства.
На основании изложенного можно заключить, что данная совокупность существенных признаков заявляемого изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решить поставленную задачу. Следовательно, заявляемое техническое решение является новым, обладает изобретательским уровнем, т.е. оно явным образом не следует из известных технических решений и пригодно для использования.
Сущность изобретения поясняется чертежами, где на фиг.1 представлена донная ортогональная база, т.е. геометрия расположения акустических приемников и источника звука относительно локальной системы координат, на фиг.2 представлена блок-схема гидроакустического комплекса.
Заявленный гидроакустический комплекс для измерения азимутального угла на источник звука в мелком море содержит донную ортогональную базу I, телеметрический блок II и систему III сбора, обработки и передачи информации. Донная ортогональная база I образуется посредством трех акустических комбинированных приемников П1, П2, П3, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей (на чертеже не показаны). Геометрия расположения акустических приемников и источника звука относительно локальной системы координат поясняется фиг.1.
Телеметрический блок II включает: делители напряжения 1, аналого-цифровую преобразующую схему 2, единую схему 3 электронного мультиплексирования, модулятор 4 и оптический излучатель 5, связанный оптической линией 6 связи с оптическим ресивером 7.
Система III сбора, обработки и передачи информации содержит: блок 8 сбора, обработки и передачи информации, трехканальный блок 9 вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока 8, первый блок 10 вычисления функции взаимной корреляции К12(τ) сигналов, вход которого соединен с выходами первого и второго каналов блока 9 вычисления вертикальной компоненты вектора интенсивности, второй блок 11 вычисления функции взаимной корреляции К13(τ) сигналов, вход которого соединен с выходами первого и третьего каналов блока 9 вычисления вертикальной компоненты вектора интенсивности, блок 12 вычисления максимума функций взаимной корреляции, вход которого соединен с выходами блоков 10 и 11 вычисления функции взаимной корреляции, блок 13 вычисления азимутального угла на источник звука относительно оси X, вход которого соединен с выходом блока 12 вычисления функции взаимной корреляции, а выход соединен со входом устройства 14 доступа к цифровым сетям передачи данных.
Гидроакустический комплекс работает следующим образом.
Звуковая волна, излучаемая источником звука, принимается акустическими комбинированными приемниками П1, П2, П3, образующих донную ортогональную базу I, базовые размеры которой Lx, Ly выбираются достаточно большими по сравнению с размером ближней зоны волновода rб=Н2/λ. Все сигналы с выходов акустических приемников поступают на вход телеметрического блока II, а после прохождения через делители напряжения 1, аналого-цифровую преобразующую схему 2 и единую схему 3 электронного мультиплексирования преобразуются в поток цифровой информации, поступающий через модулятор 4, оптический излучатель 5 и оптическую линию 6 связи на оптический ресивер 7. С выхода оптического ресивера 7 информация поступает в цифровом виде на вход блока 8 сбора, обработки и отображения информации, находящегося в системе III сбора, обработки и отображения информации. В блоке 8 сбора, обработки и отображения информации сигналы вновь разделяются по отдельным каналам звукового давления и компонент вектора колебательной скорости и поступают в трехканальный блок 9 вычисления спектральной плотности Si(ω, ri)=p(ω, ri)Vz *(ω, ri) - вертикального потока мощности в каждом из трех приемных каналов. В соответствии с результатами работы (Щуров В.А., Кулешов В.П., Ткаченко Е.С. Вихри акустической интенсивности в мелком море. // Техническая акустика. 2010. №12. http://www.ejta.org.) именно эти величины обладают наибольшей пространственной коррелированностью и наиболее простой пространственно-частотной структурой в звуковом поле, формируемом в мелком море набором нормальных волн. Эти свойства поля спектральной плотности вертикального потока мощности используются при дальнейшей обработке акустической информации. Эта обработка сводится к вычислению взаимных корреляционных функций К12(τ), К13(τ) в соответствующих блоках 10, 11, вычислению максимумов этих функций τ=tx, τ=ty в блоке 14 вычисления максимума и вычислению азимутального угла на источник звука в локальной системе координат по формуле (2) в блоке 13. При необходимости азимутальный угол, вычисленный в локальной системе координат, пересчитывается в пеленг в блоке 13, с выхода которого информация поступает в устройство 14 доступа к цифровым сетям передачи данных.

Изобретение предназначено для измерения пеленга на источник звуковых волн в мелком море в пассивном режиме с помощью акустических приемников, установленных на морском дне, координаты которых и угловое положение считаются известными. Гидроакустический измерительный комплекс (ГИК) содержит донную ортогональную базу, которая образуется посредством трех акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей. ГИК также содержит телеметрический блок, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и передачи информации, содержащую блок сбора, обработки и передачи информации, трехканальный блок вычисления вертикальной компоненты вектора интенсивности, первый блок вычисления функции взаимной корреляции К12(τ) сигналов, второй блок вычисления функции взаимной корреляции К13(τ) сигналов, блок вычисления максимума функций взаимной корреляции, блок вычисления азимутального угла на источник звука относительно оси X. Достигаемый технический результат - увеличение дальности действия и уменьшение погрешности измерения азимутального угла и пеленга путем увеличения апертуры его измерительной системы. 2 ил.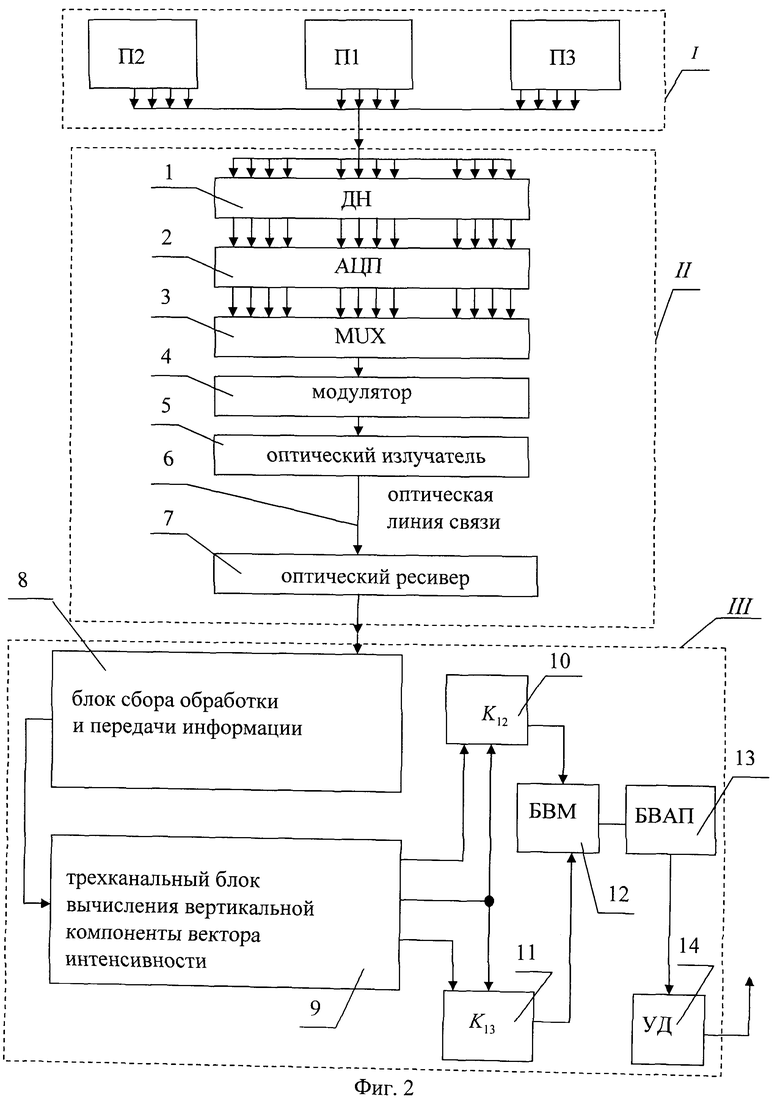
Гидроакустический измерительный комплекс, содержащий n акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, вход которого соединен с выходом акустических комбинированных приемников, включающий последовательно соединенные делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и передачи информации, содержащую блок сбора, обработки и передачи информации, вход которого соединен с выходом оптического ресивера, отличающийся тем, что в измерительном комплексе посредством трех акустических комбинированных приемников П1, П2, П3 образуется донная ортогональная база, в которой базовое расстояние Lx между приемниками П1, П2 ориентировано вдоль оси X, базовое расстояние Ly равно проекции расстояния между приемниками П1, П3 на ось Y локальной ортогональной системы координат, а базовые расстояния выбираются из условия Lx≥H2/λ, Ly≥H2/λ (Н - глубина моря, λ - длина волны на средней частоте рабочего диапазона частот), в систему сбора, обработки и отображения информации дополнительно введен трехканальный блок вычисления вертикальной компоненты вектора интенсивности, вход которого соединен с выходом блока сбора, обработки и отображения информации, первый блок вычисления функции взаимной корреляции К12(τ) сигналов, вход которого соединен с выходами первого и второго каналов блока вычисления вертикальной компоненты вектора интенсивности, второй блок вычисления функции взаимной корреляции К13(τ) сигналов, вход которого соединен с выходами первого и третьего каналов блока вычисления вертикальной компоненты вектора интенсивности, блок вычисления максимума функций взаимной корреляции, вход которого соединен с выходами блоков вычисления функций взаимной корреляции, блок вычисления азимутального угла на источник звука относительно оси X, вход которого соединен с выходом блока вычисления максимума функций взаимной корреляции, а выход соединен со входом устройства доступа к цифровым сетям передачи данных, причем функции взаимной корреляции вычисляются по формулам:


а азимутальный угол на источник звука относительно оси X локальной ортогональной системы координат вычисляется по формуле:

где τ=tx - временная задержка, соответствующая максимуму функции взаимной корреляции К12, τ=ty - временная задержка, соответствующая максимуму функции взаимной корреляции К13, с - предварительно определенная эффективная скорость звука в морской среде, Si(ω, ri)=p(ω,ri)Vz·(ω,ri) - спектральная плотность вертикального потока мощности, p(ω,ri), Vz(ω, ri) - Фурье-трансформанты звукового давления и вертикальной компоненты вектора колебательной скорости, ri - расстояние от источника звука до комбинированного акустического приемника Пi, ω0, 2Δω - средняя круговая рабочая частота и диапазон рабочих частот источника звука, Lx=(П1-П2), Ly=(П1-П3)sinθ, θ - угол между отрезками П1-П2 и П1-П3.
| УСТРОЙСТВО ДЛЯ РАЗРЕШЕНИЯ ПУСКА ОТВЕТЧИКА СТАРТСТОПНОГО ТЕЛЕГРАФНОГО АППАРАТА | 1948 |
|
SU82972A1 |
| СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ И АНТЕННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2168738C1 |
| СПОСОБ МОРСКОЙ ПОЛЯРИЗАЦИОННОЙ СЕЙСМОРАЗВЕДКИ | 2005 |
|
RU2279696C1 |
| 0 |
|
SU83140A1 | |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2236690C1 |
| US 7656749 В2, 02.02.2010 | |||
| US 6914854 В1, 05.07.2005 | |||
| US 5615175 А, 25.03.1997. | |||

