Изобретение относится к области машиностроения, в частности к устройствам для механической обработки изделий сложной пространственной формы, и может быть использовано для шлифования, полирования, фрезерования пространственно-сложных поверхностей деталей, в частности лопастей гребных винтов, рабочей части лопаток газовой, паровой или гидротурбины.
Известно устройство для механической обработки изделий сложной пространственной формы, содержащее основание и расположенные на нем узел для установки обрабатывающего инструмента с приводом его вращения и перемещения и узел для установки обрабатываемого изделия с возможностью его перемещения (Европейский патент 0142072 по кл. В24В 19/20 от 20.10.1984 г.). Недостатками данного устройства являются относительная сложность устройства, относительно низкая точность обработки изделий, обусловленные большим количеством звеньев в узлах для перемещения и вращения обрабатывающего инструмента и для перемещения обрабатываемого изделия.
Известно также устройство для механической обработки лопаток турбин, содержащее основание и размещенные на нем узел для перемещения обрабатываемого изделия по шести координатам, узел для вращения и поступательного перемещения обрабатывающего инструмента (Европейский патент 0325495 по кл. В24В 19/14 от 23.01.1989 г.). Недостатком данного устройства является большая инерционная масса звеньев механизма, снижающая производительность обработки, обусловленная тем, что звенья в узлах для перемещения обрабатываемого изделия и обрабатывающего инструмента последовательно связаны поступательными кинематическими парами.
Известно устройство для механической обработки изделий сложной пространственной формы, содержащее основание и размещенные на нем узел для установки обрабатывающего инструмента, снабженный корпусом привода вращения инструмента, узел установки обрабатываемого изделия, выполненный в виде многозвенного манипулятора, содержащего ведущие и ведомые звенья, шарнирно соединенные между собой и с приводами их вращательного перемещения (патент РФ 2063329 по классу B25J 9/00 от 10.07.1996 г.). Недостатками данного устройства являются сложность конструкции, обусловленная наличием большого числа звеньев в манипуляторах, а также неравномерность отношения среднеквадратичной величины приводных скоростей к скорости перемещения инструмента относительно изделия в пределах рабочей зоны (кинематическая анизотропность пространственного механизма).
Наиболее близким техническим решением по отношению к предложенному устройству по совокупности существенных признаков является устройство для механической обработки изделий сложной пространственной формы, содержащее основание и размещенные на нем манипулятор перемещения обрабатываемого изделия, состоящий из плоского пятизвенного манипулятора с двумя вращательными приводами, перемещающего еще два вращательных привода (всего имеющий четыре управляемые координаты), и плоский двухзвенный манипулятор перемещения привода вращения режущего инструмента (еще две управляемые координаты)(патент РФ 2202465 от 28.05.2001 г. по классу B25J 9/00; В24В 19/14). Следует отметить также возможность применения привода прямого действия на основе синхронных вращательных электродвигателей с постоянными магнитами, что позволяет исключить редукторы из конструкции, тем самым упрощая ее и уменьшая погрешность обработки. Наличие шести управляемых координат создает возможность обработки изделия перемещением инструмента относительно изделия в соответствии со способом, описанным в патенте РФ 2198778 от 26.02.2001 г. по классу В24В 19/14; В24В 19/20; В24В 51/00; В23С 3/18.
Вместе с тем, механизм содержит большое количество вращательных кинематических пар, каждая из которых вносит свой вклад в погрешность обработки за счет люфта и эксцентриситета. Манипулятор перемещения изделия перемещается в вертикальной плоскости, что вызывает необходимость статической разгрузки манипулятора дополнительными разгрузочными устройствами, которые предложены в патенте РФ 2377116 от 28.04.2008 по классу В24В 19/14; B25J 9/00; B23Q 27/00. Несмотря на увеличение числа разгрузочных устройств, манипулятор перемещения изделия остается не полностью разгруженным, вследствие чего в его крайних положениях статическая нагрузка на два привода превышает допустимые значения. Это приводит к существенному уменьшению рабочей зоны.
Задача, на решение которой направлено заявленное изобретение, заключается в увеличении рабочей зоны механизма за счет применения полностью уравновешенного манипулятора перемещения изделия и в повышении точности обработки изделий за счет уменьшения числа подвижных звеньев и кинематических пар механизма.
Поставленная задача решается за счет того, что для обеспечения полной разгрузки манипулятора перемещения изделия от силы тяжести его ведущее звено сопрягается с основанием горизонтальной поступательной кинематической парой, а его ведомое звено является статически уравновешенным относительно оси вращательной кинематической пары, сопрягающей ведущее и ведомое звенья. Для обработки изделий сложной пространственной формы вращающимся инструментом (фрезой, шлифовальным кругом и т.п.) требуется, по меньшей мере, пять управляемых координат, определяющих положение поверхности вращения (режущей поверхности инструмента) в системе координат обрабатываемого изделия. Таким образом, устройство имеет две управляемые координаты в манипуляторе перемещения инструмента и три управляемые координаты в манипуляторе перемещения изделия. Манипулятор перемещения инструмента перемещается в горизонтальной плоскости и сила тяжести не оказывает влияния на его исполнительные приводы. Манипулятор перемещения изделия может быть полностью статически уравновешен за счет того, что его ведущее звено перемещается горизонтально, а массы на ведомом звене распределены так, чтобы центр тяжести этого звена был расположен на оси вращательной кинематической пары, сопрягающей ведущее и ведомое звенья.
На фиг.1 представлен общий вид устройства для механической обработки изделий сложной пространственной формы. Манипулятор перемещения инструмента 12 расположен на основании 1 и содержит первый вращательный привод 2, перемещающий ведущее звено 3 вокруг вертикальной оси, на котором расположен второй вращательный привод 4, перемещающий ведомое звено 5 вокруг вертикальной оси относительно ведущего звена 3. На ведомом звене 5 установлен привод 14 вращения режущего инструмента 12. Манипулятор перемещения изделия расположен на основании 1 и содержит поступательную кинематическую пару 6, по которой соответствующим линейным приводом 13 или вращательным приводом в сочетании с передаточным механизмом горизонтально перемещается ведущее звено 7. На ведущем звене 7 манипулятора перемещения изделия расположен вращательный привод 8, перемещающий ведомое звено 9 вокруг горизонтальной оси, перпендикулярной направлению перемещения ведущего звена. На ведомом звене 9 расположен привод 10 вращательного перемещения обрабатываемого изделия 11. Ведомое звено 9 совместно с приводом 10 вращательного перемещения обрабатываемого изделия 11 является статически уравновешенным относительно горизонтальной оси привода 8.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения. Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Устройство работает следующим образом. После закрепления инструмента 12 на валу привода 14, после закрепления обрабатываемого изделия 11 на валу привода 10 и запуска устройства происходит обработка изделия по программе, которая определяется заданной формой изделия, при этом линейные перемещения обрабатываемого изделия 11 по двум координатам в вертикальной плоскости осуществляются посредством приводов 13, 8, движения которых передаются соответственно через звенья 7 и 9 и суммируются на обрабатываемом изделии. Привод 10 может обеспечить неограниченное угловое перемещение обрабатываемого изделия 11 вокруг своей оси. Одновременно с указанными перемещениями обрабатываемого изделия осуществляется перемещение режущего инструмента 12 по одной угловой и одной линейной координате в горизонтальной плоскости совместно приводами 2 и 4, при этом перемещение инструмента осуществляется при помощи ведущего звена 3 и ведомого звена 5, вращение инструмента осуществляется при помощи привода 14.
Предложенное устройство позволяет повысить точность относительных перемещений манипуляторов за счет уменьшения числа звеньев и кинематических пар, а также увеличить рабочую зону перемещений инструмента относительно обрабатываемого изделия за счет применения полностью уравновешиваемой конструкции манипулятора, увеличивающей диапазон его горизонтальных перемещений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2384398C2 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2008 |
|
RU2377116C1 |
| ШАРНИР МАНИПУЛЯТОРА | 2005 |
|
RU2283217C1 |
| МАНИПУЛЯТОР СТАНКА ДЛЯ СНЯТИЯ КРОМОК ИЛИ ФАЦЕТА ПЛОСКИХ СТЕКЛЯННЫХ ИЗДЕЛИЙ | 2010 |
|
RU2481184C2 |
| СФЕРИЧЕСКИЙ V-МАНИПУЛЯТОР | 2020 |
|
RU2730345C1 |
| МАНИПУЛЯТОР-ТРИПОД С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ | 2008 |
|
RU2403143C2 |
| РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2063329C1 |
| Манипулятор для передачи изделий | 2023 |
|
RU2822908C1 |
| МАНИПУЛЯТОР ДЛЯ ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ | 2013 |
|
RU2547981C2 |
Изобретение относится к области машиностроения и может быть использовано для шлифования, полирования, фрезерования пространственно-сложных поверхностей деталей, в частности лопастей гребных винтов, рабочей части лопаток газовой, паровой или гидротурбины. На основании устройства размещены узел для установки обрабатывающего инструмента с приводом вращения инструмента и узел для установки обрабатываемого изделия в виде многозвенного манипулятора. Узел для установки обрабатывающего инструмента представляет собой двухзвенный манипулятор, перемещающий привод вращения инструмента в горизонтальной плоскости. Узел для установки обрабатываемого изделия содержит ведущее звено, сопрягаемое с основанием горизонтальной поступательной кинематической парой, и сопряженное с ним вращательной кинематической парой статически уравновешенное ведомое звено с приводом вращательного перемещения обрабатываемого изделия. В результате повышается точность относительных перемещений манипуляторов за счет уменьшения числа звеньев и кинематических пар, а также увеличивается рабочая зона перемещений инструмента относительно обрабатываемого изделия за счет применения полностью уравновешиваемой конструкции манипулятора, увеличивающей диапазон его горизонтальных перемещений. 1 з.п. ф-лы, 1 ил.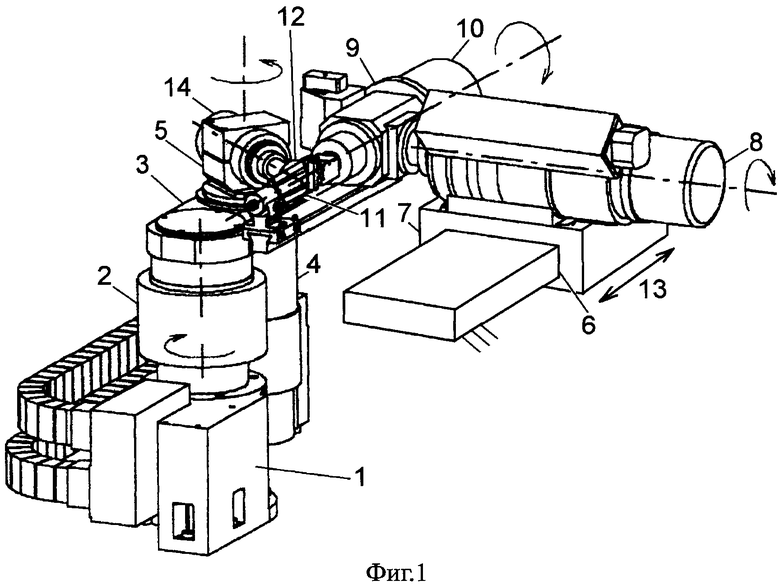
1. Устройство для механической обработки изделий сложной пространственной формы, содержащее основание и размещенные на нем узел для установки обрабатывающего инструмента с приводом вращения инструмента и манипулятор перемещения изделия, содержащий привод вращательного перемещения обрабатываемого изделия и ведущее и ведомое звенья, шарнирно соединенные между собой и с приводами их перемещения и образующие плоский механизм, причем узел для установки обрабатывающего инструмента выполнен в виде двухзвенного манипулятора, ведущее звено которого закреплено на основании и содержит привод, сопряженный с ведомым звеном, отличающееся тем, что для обеспечения полной разгрузки манипулятора перемещения изделия от силы тяжести его ведущее звено сопряжено с основанием горизонтальной поступательной кинематической парой, а его ведомое звено совместно с приводом вращательного перемещения обрабатываемого изделия выполнено статически уравновешенным относительно оси вращательной кинематической пары, сопрягающей ведущее и ведомое звенья.
2. Устройство по п.1, отличающееся тем, что в манипуляторе перемещения изделия угол между поступательной кинематической парой и осью вращательной кинематической пары, сопрягающей ведущее и ведомое звенья, равен 90°.
| RU 2202465 С2, 20.04.2003 | |||
| ПАТЕНТНО-ТЕХНННККИБИБЛИОТЕКА | 0 |
|
SU325495A1 |
| US 4603511 A, 05.08.1986. | |||

