Изобретение относится к области машиностроения, в частности к устройствам для механической обработки изделий сложной пространственной формы, и может быть использовано для шлифования, полирования, фрезерования, например, лопаток турбин авиационных двигателей, компрессоров и других изделий сложной пространственной формы.
Известно устройство для механической обработки изделий сложной пространственной формы, содержащее основание и размещенные на нем манипулятор перемещения обрабатывающего инструмента, снабженный приводом вращения инструмента, манипулятор перемещения обрабатываемого изделия, выполненный в виде многозвенного манипулятора, содержащего ведущие и ведомые звенья, шарнирно соединенные между собой и с приводами их вращательного перемещения (патент РФ №2063329 по кл. B25J 9/00 от 10.07.1996 г.).
Недостатком данного устройства является относительно низкая точность получения геометрических размеров поверхности в процессе обработки.
Наиболее близким техническим решением по совокупности существенных признаков является устройство для механической обработки изделий сложной пространственной формы, которое содержит основание, на котором размещен манипулятор перемещения обрабатывающего инструмента, выполненный в виде двухзвенного манипулятора с входным и выходным звеньями, на котором размещен привод вращения инструмента.
На основании также размещен манипулятор перемещения обрабатываемого изделия, выполненный в виде многозвенного механизма с приводом перемещения обрабатываемого изделия и плоский механизм с ведущими и ведомыми звеньями, при этом ведущие звенья соединены с приводами (патент РФ №2202465 по кл. B25J 9/00 от 20.04.2003 г.).
Недостатком данного устройства является относительно низкая точность получения заданных геометрических размеров поверхности в процессе обработки поверхности изделия, невозможность компенсации статических нагрузок по всем управляемым координатам, обусловленные неуравновешенностью масс и приводящие к превышению статических моментов в отдельных точках рабочей зоны по отношению к моментам, развиваемым исполнительными приводами, что требует применения приводов с необоснованно завышенными энергетическими характеристиками, снижает скорость перемещения выходного звена по заданной траектории и ухудшает точность воспроизведения программных движений из-за наличия статических и динамических ошибок, а также снижает производительность механической обработки изделий.
Задача, на решение которой направлено заявленное изобретение, заключается в повышении точности получения и контроля геометрических размеров поверхности изделия в процессе ее обработки и повышения производительности работы устройства.
Поставленная задача решается за счет того, что в устройство для механической обработки изделий сложной пространственной формы, содержащее основание, на котором размещены манипулятор перемещения обрабатывающего инструмента, выполненный в виде двухзвенного механизма с входным и выходным звеньями, на котором размещен привод вращения инструмента и манипулятор перемещения обрабатываемого изделия, выполненный в виде многозвенного механизма с приводом вращения обрабатываемого изделия и плоским механизмом его перемещения с ведущими и ведомыми звеньями, при этом ведущие звенья соединены с приводами, снабжено блоком оптического контроля геометрических параметров обрабатываемого изделия, расположенным на крышке устройства и блоком разгрузки от статических моментов приводов перемещения плоского многозвенного механизма и привода вращения обрабатываемого изделия, при этом блок разгрузки выполнен в виде отдельных узлов разгрузки приводов плоского многозвенного механизма и привода вращения обрабатываемого изделия, причем один узел разгрузки выполнен в виде полиспаста, состоящего из подвижного блока, связанного с выходным звеном многозвенного механизма и двух управляемых приводов, второй узел разгрузки выполнен в виде управляемого привода, выходной шток которого связан с выходным звеном многозвенного механизма, а корпус закреплен на основании устройства, третий узел разгрузки выполнен в виде управляемого привода, закрепленного на ведущем звене и на стенке корпуса устройства, а оптический блок контроля выполнен в виде герметичного кожуха с отверстием для введения обрабатываемого изделия в зону контроля, внутри кожуха расположен источник монохроматического света и последовательно установленные по ходу луча света объектив, зеркальные элементы и фокусирующая линза, между зеркальным элементом и контролируемой поверхностью изделия размещена дифракционная решетка, а на выходе кожуха установлена телевизионная камера.
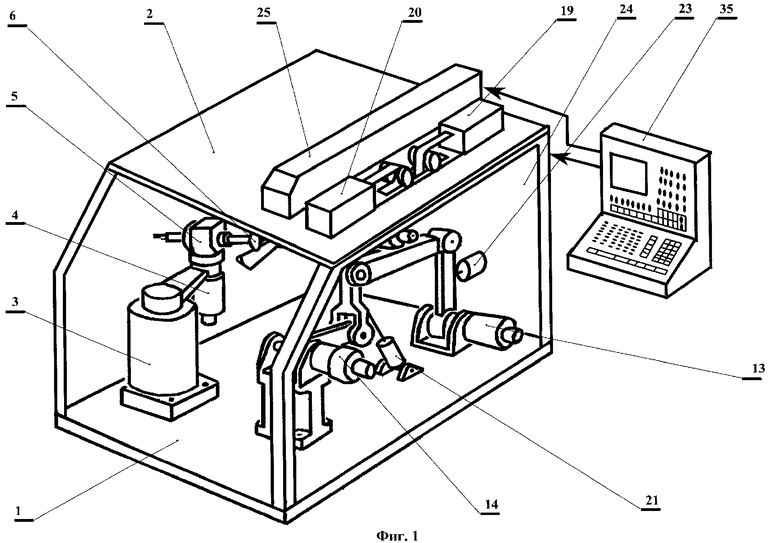
На фиг.1 показан общий вид устройства для механической обработки изделий сложной пространственной формы без крышки.
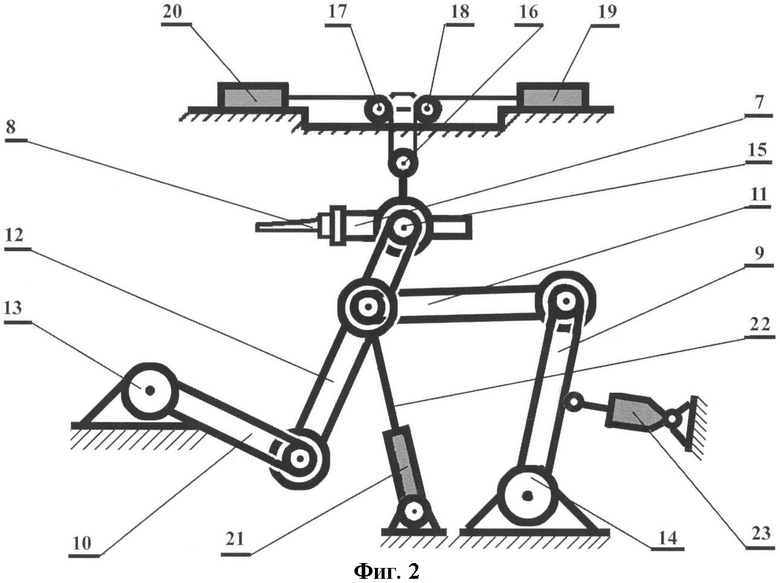
На фиг.2 показан плоский многозвенный механизм с ведущими и ведомыми звеньями с узлами разгрузки приводов перемещения многозвенного механизма.
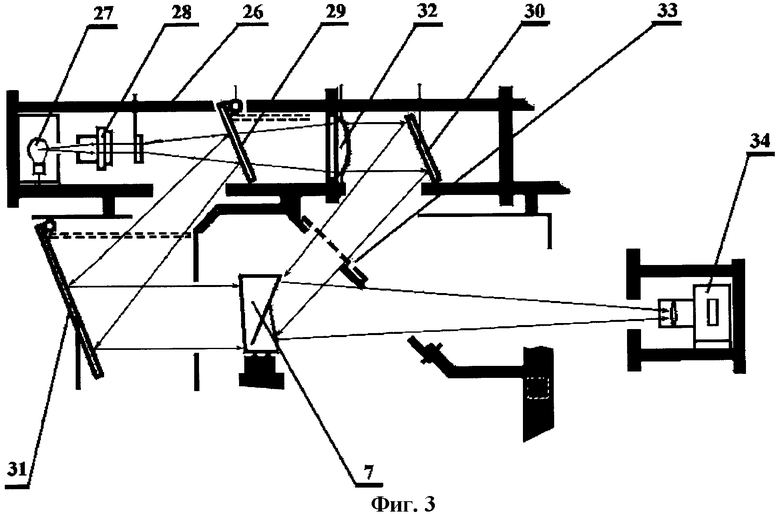
На фиг.3 показана структурная схема блока оптического контроля геометрических параметров обрабатываемого изделия.
Устройство для механической обработки изделий сложной пространственной формы содержит: основание 1, крышку 2, расположенные на основании манипулятор перемещения обрабатывающего инструмента, выполненный в виде двухзвенного механизма с входным звеном 3 и выходным звеном 4, на котором размещен привод 5 вращения инструмента 6. На основании размещен также манипулятор перемещения обрабатываемого изделия, выполненный в виде многозвенного механизма с приводом вращения 7 обрабатываемого изделия 8 и плоский механизм с ведущими звеньями 9 и 10 и ведомыми звеньями 11 и 12, при этом ведущие звенья соединены с приводами 13 и 14, а ведомое звено 12 - с приводом 15.
Устройство содержит блок разгрузки от статических моментов приводов перемещения плоского многозвенного механизма вращения, при этом блок разгрузки выполнен в виде отдельных узлов разгрузки приводов многозвенного механизма. Первый узел разгрузки привода выполнен в виде полиспаста (фиг.2), состоящего из подвижного блока 16, связанного с выходным звеном многозвенного механизма и соединенных друг с другом подвижных блоков 17 и 18, расположенных на крышке 2 и связанных с разгрузочными приводами 19 и 20. Второй узел разгрузки приводов многозвенного механизма выполнен в виде управляемого привода 21, шток 22 которого соединен с местом подвижного соединения ведомых звеньев 11 и 12, а корпус подвижно закреплен на основании устройства 1.
Третий узел разгрузки привода многозвенного механизма выполнен в виде управляемого привода 23, выходной шток которого закреплен на ведущем звене 9, а другой - на стенке 24 корпуса устройства.
Устройство содержит также блок оптического контроля геометрических параметров обрабатываемого изделия 25, размещенный на крышке устройства 2. Блок выполнен в виде герметичного кожуха 26, внутри которого расположен источник монохроматического света 27 и последовательно установленные по ходу луча света объектив 28, зеркальные элементы 29, 30, 31, фокусирующая линза 32 и дифракционная решетка 33. На выходе кожуха расположена телевизионная камера 34. Управление устройством осуществляется по программе управления при помощи пульта 35.
Устройство работает следующим образом.
После закрепления инструмента 6, обрабатываемого изделия 8 и включения устройства с пульта 35 происходит обработка изделия по программе, которая определяется требуемой формой изделия, при этом линейные перемещения обрабатываемого изделия осуществляются при помощи приводов 13 и 14, движения которых передаются через звенья 9, 10, 11 и суммируется в звене 12.
Привод 15 осуществляет вращение выходного звена механизма относительно оси перпендикулярной плоскости, в которой перемещается многозвенный механизм перемещения обрабатываемого изделия 8. Привод осуществляет вращение обрабатываемого изделия относительно оси параллельной плоскости работы многозвенного механизма. В процессе работы устройства приводы перемещения 13 и 14 воспринимают значительные статические нагрузки от сил веса звеньев 9, 10, 11, 12, что увеличивает нагрузочный момент на валу. Статические моменты, действующие на приводы, уменьшают скорость перемещения выходного звена по заданной траектории и ухудшают точность воспроизведения движений по программе из-за наличия статических и динамических ошибок. Для преодоления статических моментов требуется применять приводы с необоснованно завышенными энергетически завышенными характеристиками.
Для устранения указанных недостатков устройство снабжено блоком разгрузки от статических сил по всем управляемым координатам, нагруженным статическими силами, которые обусловлены неуравновешенными массами. В рассматриваемом пятизвенном плоском механизме перемещения обрабатываемого изделия это достигается введением подвесного узла (полиспаста) с двумя управляемыми пневмоцилиндрами, напольного управляемого пневмоцилиндра и бокового узла (пружинного элемента).
Наличие узлов разгрузки позволило эффективно использовать блок оптического (бесконтактного) контроля геометрических параметров обрабатываемого изделия, т.к. только в совокупности узлов разгрузки и блока оптического контроля позволяет обеспечивать требуемую точность обработки сложных поверхностей в процессе обработки без снятия обрабатываемого изделия, что повышает производительность работы устройства.
Оптический блок контроля работает следующим образом.
Луч монохроматического света, пройдя через объектив, фокусирующую линзу, отражаясь от зеркальных элементов и пройдя через дифракционную решетку, попадает на поверхность обрабатываемого изделия и, отражаясь от нее, попадает на фотоматрицу телевизионной камеры. Изображение, зафиксированное телевизионной камерой, записывается в память компьютера как двумерный массив координат анализируемых точек поверхности. Применение дифракционной решетки позволяет получить полную непрерывную информацию о контролируемой поверхности, попадающей в поле зрения фотоматрицы.
Таким образом, введение в устройство для механической обработки изделий сложной пространственной формы блока разгрузки от статических моментов и оптического блока контроля геометрических размеров обрабатываемого изделия, позволяет повысить точность и производительность обработки, благодаря контролю геометрических размеров поверхности в процессе обработки изделия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2011 |
|
RU2475347C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2006 |
|
RU2353502C2 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2020 |
|
RU2749819C1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЦИЛИНДРИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2010 |
|
RU2437753C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| Устройство дистанционного управления секцией крепи | 1979 |
|
SU870735A1 |
| Устройство для поточно-винтовой обработки зубчатых изделий | 1989 |
|
SU1757794A1 |
Изобретение относится к области машиностроения, в частности к устройствам для механической обработки изделий сложной пространственной формы, и может быть использовано для шлифования, полирования, фрезерования, например, лопаток турбин авиационных двигателей, компрессоров. На основании размещены манипулятор перемещения обрабатывающего инструмента и манипулятор перемещения обрабатываемого изделия. Первый манипулятор выполнен с входным и выходным звеньями. На нем размещен привод вращения инструмента. Второй манипулятор выполнен с приводом вращения обрабатываемого изделия и плоским механизмом его перемещения с ведущими и ведомыми звеньями. Устройство снабжено блоком оптического контроля геометрических параметров обрабатываемого изделия. Имеется блок разгрузки от статических моментов приводов перемещения плоского многозвенного механизма и привода вращения обрабатываемого изделия, выполненных в виде отдельных узлов разгрузки. Один узел выполнен в виде полиспаста, состоящего из подвижного блока, связанного с выходным звеном многозвенного механизма, и двух управляемых приводов. Второй узел выполнен в виде управляемого привода, выходной шток которого связан с выходным звеном многозвенного механизма. Корпус привода закреплен на основании. Третий узел выполнен в виде управляемого привода, закрепленного на ведущем звене и на стенке корпуса устройства. В результате обеспечивается повышение точности получения и контроля геометрических размеров поверхности изделия. 1 з.п. ф-лы, 3 ил.
1. Устройство для механической обработки изделий сложной пространственной формы, содержащее размещенные на основании корпус, манипулятор перемещения обрабатывающего инструмента в виде двухзвенного механизма с входным и выходным звеньями, на котором размещен привод вращения инструмента, и манипулятор перемещения обрабатываемого изделия, выполненный в виде многозвенного механизма с приводом вращения обрабатываемого изделия и плоским многозвенным механизмом его перемещения с ведущими и ведомыми звеньями, при этом ведущие звенья соединены с приводами, отличающееся тем, что оно снабжено крышкой, расположенным на ней блоком оптического контроля геометрических параметров обрабатываемого изделия и блоком разгрузки от статических моментов приводов перемещения ведущих звеньев плоского многозвенного механизма перемещения и привода вращения обрабатываемого изделия, при этом упомянутый блок разгрузки выполнен в виде отдельных узлов разгрузки приводов перемещения ведущих звеньев плоского многозвенного механизма и привода вращения обрабатываемого изделия, причем один узел разгрузки выполнен в виде полиспаста, состоящего из подвижного блока, связанного с выходным звеном плоского многозвенного механизма и двух управляемых приводов, второй узел разгрузки выполнен в виде управляемого привода с выходным штоком, который связан с выходным звеном плоского многозвенного механизма, и корпусом, закрепленным на основании, а третий узел разгрузки выполнен в виде управляемого привода, закрепленного на ведущем звене плоского многозвенного механизма и на стенке корпуса.
2. Устройство по п.1, отличающееся тем, что оптический блок контроля выполнен в виде герметичного кожуха с отверстием для введения обрабатываемого изделия в зону контроля, расположенного внутри кожуха источника монохроматического света и последовательно установленных по ходу луча света объектива, зеркальных элементов и фокусирующей линзы, причем между зеркальным элементом и контролируемой поверхностью изделия размещена дифракционная решетка, а на выходе кожуха установлена телевизионная камера.
| RU 2202465 С2, 20.04.2003 | |||
| РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2063329C1 |
| СПОСОБ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ | 2001 |
|
RU2198778C2 |
| ПАТЕНТНО-ТЕХНННККИБИБЛИОТЕКА | 0 |
|
SU325495A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОСТАНОВКИБУЙРЕПАВЬЮШКИ | 0 |
|
SU179638A1 |
| ДВИЖОК ИНТРОСПЕКЦИИ ПАМЯТИ ДЛЯ ЗАЩИТЫ ЦЕЛОСТНОСТИ ВИРТУАЛЬНЫХ МАШИН | 2014 |
|
RU2640300C2 |

