Изобретение относится к высокоманевренным транспортным средствам и может быть применено для перемещения людей с ограниченной подвижностью в помещениях и на улице. Объектами изобретения являются вариант транспортного средства с тремя колесам и вариант - с четырьмя колесами.
В качестве прототипа для первого варианта выбрано трехколесное персональное транспортное средство фирмы BRUNO модель THE REGAL CUB [Инструкция по эксплуатации BRUNO INDEPENDENT LIVING AIDS, INC S/N 98120200122. 1998]. На несущей конструкции транспортного средства закреплено кресло, рулевая колонка с передним поворотным ведущим колесом и пультом управления. Полуоси задних колес закреплены на несущей конструкции неподвижно. Привод работает от аккумулятора, закрепленного под креслом. Устройство достаточно компактное, однако недостаточно маневренное. Парковка к стенке или тротуару осуществляется традиционным способом, т.е. поворачивают переднее колесо, подъезжают к выбранному месту и, маневрируя, занимают желаемое положение. При этом задние колеса совершают только вращательное движение, следуя по дуговым траекториям за передним колесом, или остаются на месте. Такой маневр требует достаточно большого пространства.
Разворот транспортного средства также осуществляется традиционным способом - поворотом переднего колеса. Для минимизации площади разворота переднее колесо поворачивают на 90°, и разворот осуществляют вокруг центра, лежащего посредине между задними колесами. При этом минимальный радиус поворота равен колесной базе транспортного средства.
В качестве прототипа для второго варианта изобретения выбрано четырехколесное самоходное транспортное средство Meyra модель 3.420 [Каталог фирмы Wilhelm Meyer GmbH&Co, №3/95 DC, стр.182]. Транспортное средство имеет несущую конструкцию, на которой закреплено кресло, два передних ведущих колеса, привод которых работает от аккумулятора, закрепленного под креслом. Два задних колеса являются неприводными поворотными, они закреплены на опорах в виде вилок с вертикальной осью вращения и соединены «рулевой трапецией». Пульт управления находится на подлокотнике кресла и имеет джойстик. Данная конструкция обладает теми же недостатками, что описаны выше - недостаточной маневренностью, т.е. парковка и разворот осуществляются традиционными способами и требуют значительной площади.
В основу изобретения поставлена задача повышения маневренности, а именно создание конструкции, позволяющей минимизировать площадь для разворота и парковки транспортного средства.
Поставленная задача в первом варианте решается тем, что персональное самоходное транспортное средство имеет в своем составе несущую конструкцию, на которой закреплено кресло, источник питания, переднее поворотное колесо, два задних колеса и систему управления. От прототипа транспортное средство отличается тем, что каждое заднее колесо снабжено приводом, обеспечивающим его независимый от других колес поворот вокруг вертикальной оси. Каждый привод задних колес закреплен на задней части несущей конструкции и имеет связь с опорой колеса, имеющей вертикальную осью поворота. Приводы поворота колес выполнены с обеспечением возможности реализации как минимум двух режимов движения, а именно первый режим поворота задних колес синхронно и на одинаковый угол с передним колесом, а также второй режим поворота задних колес, при котором проекции горизонтальных осей вращения всех колес на опорную поверхность сходятся в одной точке, являющейся центром поворота транспортного средства. При этом угол между указанными проекциями для задних колес отличен от нуля.
При втором режиме центр поворота находится на проекции на опорную поверхность продольной плоскости симметрии транспортного средства и отстоит от вертикальной оси поворота переднего колеса на расстоянии L, которое определяется интервалом от L=0,1H до L=0,9H, где Н - колесная база. Наилучший результат для второго режима достигается, когда центр поворота находится на проекции на опорную поверхность продольной плоскости симметрии транспортного средства и отстоит от вертикальной оси поворота переднего колеса на расстоянии L, которое определяется как L=(0,4-0,6)Н, где Н - колесная база.
При этом ведущим может быть как переднее колесо, так и задние, также все колеса.
Во втором варианте изобретения поставленная задача решается тем, что персональное самоходное транспортное средство имеет в своем составе несущую конструкцию, на которой закреплено кресло, источник питания, два передних и два задних колеса и систему управления. От прототипа заявляемое транспортное средство отличается тем, что каждое колесо снабжено приводом, обеспечивающим его независимый от других колес поворот вокруг вертикальной оси. Каждый привод закреплен на несущей конструкции и имеет связь с опорой колеса, которая имеет вертикальную осью поворота. Приводы поворота колес выполнены с обеспечением возможности реализации как минимум двух режимов движения, а именно первый режим поворота задних колес синхронно и на одинаковый угол с передними колесами, а также второй режим поворота задних колес, при котором проекции горизонтальных осей вращения всех колес на опорную поверхность сходятся в одной точке, являющейся центром поворота транспортного средства, при этом угол между указанными проекциями для задних колес отличен от нуля. При втором режиме центр поворота находится на проекции на опорную поверхность продольной плоскости симметрии транспортного средства и отстоит от плоскости расположения вертикальных осей поворота передних колес на расстоянии М, которое определяется интервалом от М=0,1Н до М=0,9Н, где Н - колесная база.
Наилучший результат для второго режима достигается, когда центр поворота находится на проекции на опорную поверхность продольной плоскости симметрии транспортного средства и отстоит от плоскости расположения вертикальных осей передних колес на расстоянии М, которое определяется как М=(0,4-0,6)Н, где Н - колесная база. При этом ведущими могут быть как передние колеса, так и задние или диагонально расположенные колеса. Ведущими колесами могут быть и все четыре колеса.
В обоих вариантах изобретения опора колеса может быть выполнена в виде вилки, или стойки, или кронштейна.
Более подробно сущность изобретения раскрывается в приведенных ниже примерах реализации и иллюстрируется чертежами, на которых представлено: Фиг.1 - трехколесное транспортное средство, общий вид, Фиг.2 - мотор-колесо с приводом, Фиг.3 - трехколесное транспортное средство, движение боком, Фиг.4 - трехколесное транспортное средство, разворот на месте, Фиг.5 - четырехколесное транспортное средство, общий вид, Фиг.6 - четырехколесное транспортное средство, движение боком, Фиг.7 - четырехколесное транспортное средство, разворот на месте, Фиг.8 - трехколесное транспортное средство, схема поворота колес для движения вперед бортом (движение «крабом»), Фиг.9 - четырехколесное транспортное средство, схема поворота колес для движения «крабом», Фиг.10 - трехколесное транспортное средство, схема установки колес для поворота транспортного средства, Фиг.11 - четырехколесное транспортное средство, схема установки колес для поворота транспортного средства, Фиг.12 - трехколесное транспортное средство, возможные положения центра поворота, Фиг.13 - трехколесное транспортное средство, изменение положения центра поворота для разворота на месте, Фиг.14 - позиция IV на Фиг.13, увеличено, Фиг.15 - позиция V на Фиг.13, увеличено, Фиг.16 - четырехколесное транспортное средство, изменение положения центра поворота, Фиг.17 - позиция IV на Фиг.16, увеличено, Фиг.18 - позиция V на Фиг.16, увеличено, Фиг.19 - поясняющий чертеж к определению зависимостей угла поворота трехколесного транспортного средства.
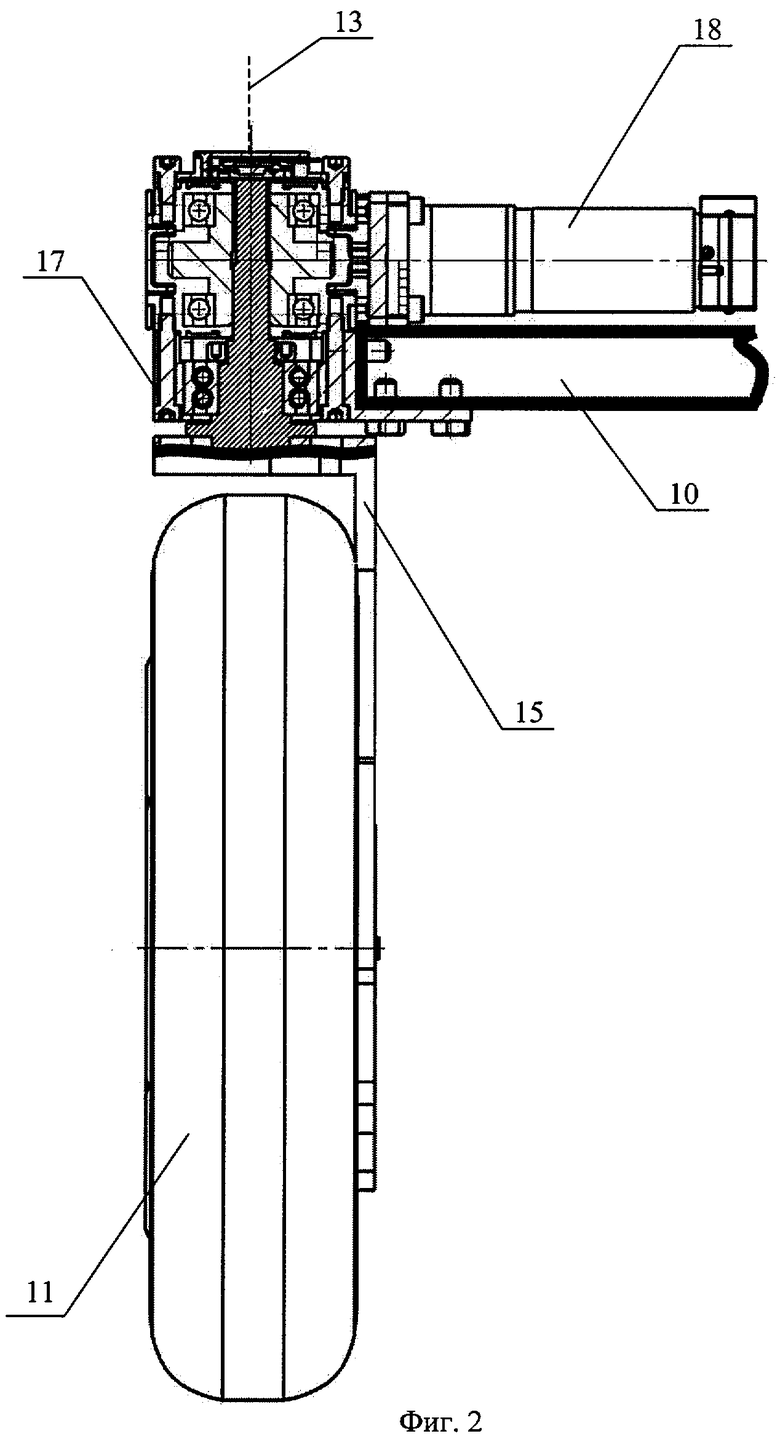
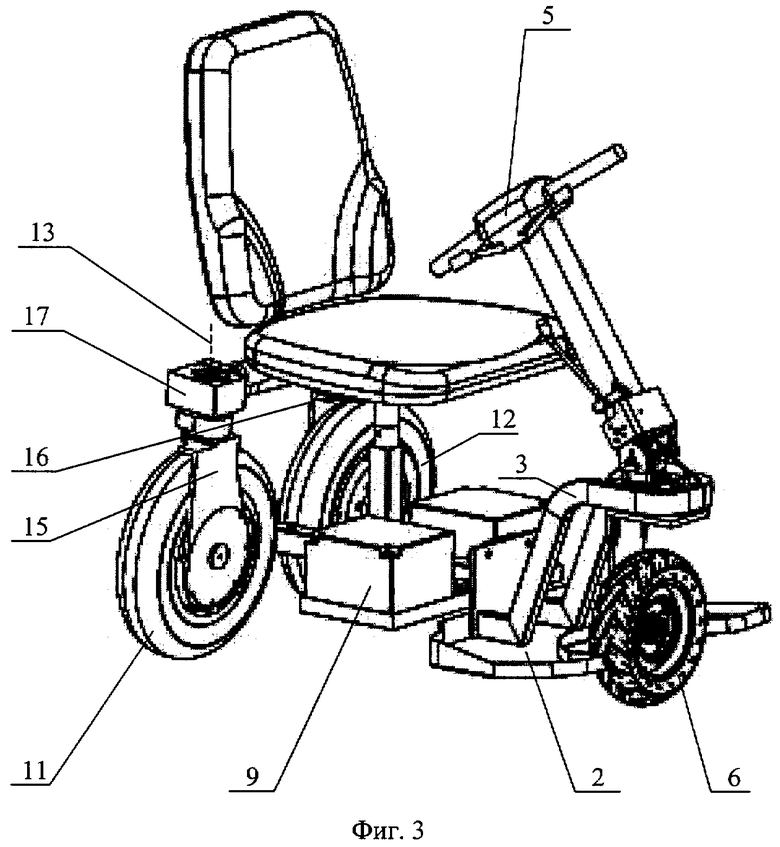
Трехколесное транспортное средство имеет в своем составе рамную несущую конструкцию 1 с подножками 2, опорой 3 рулевой колонки 4, закрепленной с обеспечением возможности изменения угла ее наклона. На рулевой колонке 4 имеется пульт 5 управления транспортным средством. Переднее колесо 6 закреплено на опоре, которая выполнена в виде вилки 7 с вертикальной или близкой к вертикальной осью поворота. Переднее колесо может быть ведущим и выполнено в виде, например, мотор-колеса. На несущей конструкции установлено кресло 8, под сиденьем которого расположены источники питания приводов - аккумуляторы 9. На задней части несущей конструкции на кронштейне 10 закреплены приводы поворота задних колес 11, 12 вокруг вертикальных осей 13 и 14 соответственно. Опорами задних колес могут служить стойки 15, 16, выполненные в виде Г-образно изогнутых пластин или балок, горизонтальная полка каждой из которых неподвижно соединена с вертикальным выходным валом своего редуктора 17 поворота, приводимого в движение электродвигателем 18. На вертикальной полке каждой стойки закреплено колесо: либо его ось, если колесо не является ведущим, либо двигатель колеса, если колесо является ведущим, т.е. мотор-колесом. Таким образом, между приводом поворота каждого заднего колеса имеется шарнирная связь с опорой колеса, имеющей вертикальную осью поворота. Опора каждого заднего колеса может быть выполнена в виде вилки, например, как для переднего колеса, или в виде кронштейна, или в любом другом приемлемом конструкционном виде. Переднее колесо 6 может не иметь рулевой колонки, а управляться от пульта управления, например, с джойстиком, закрепленным на подлокотнике кресла.
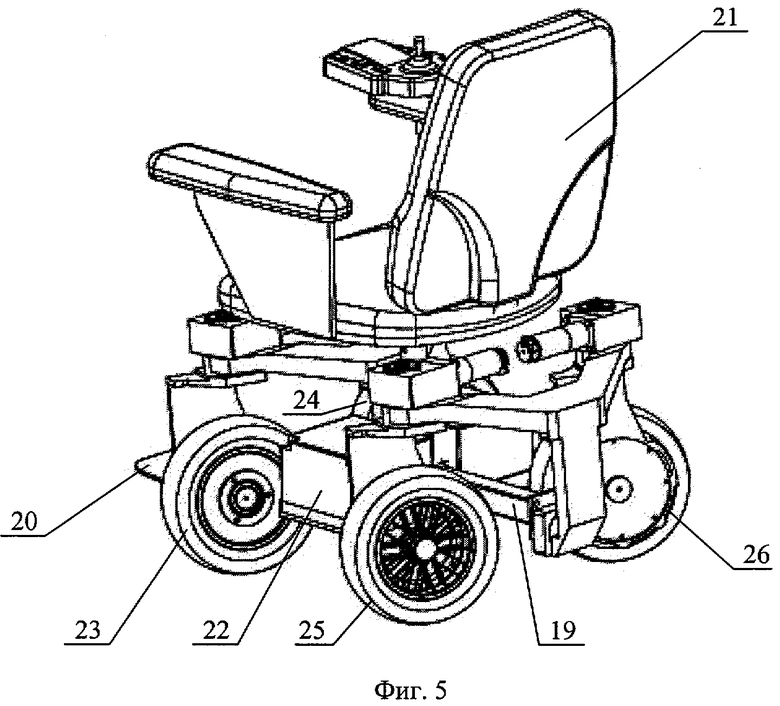
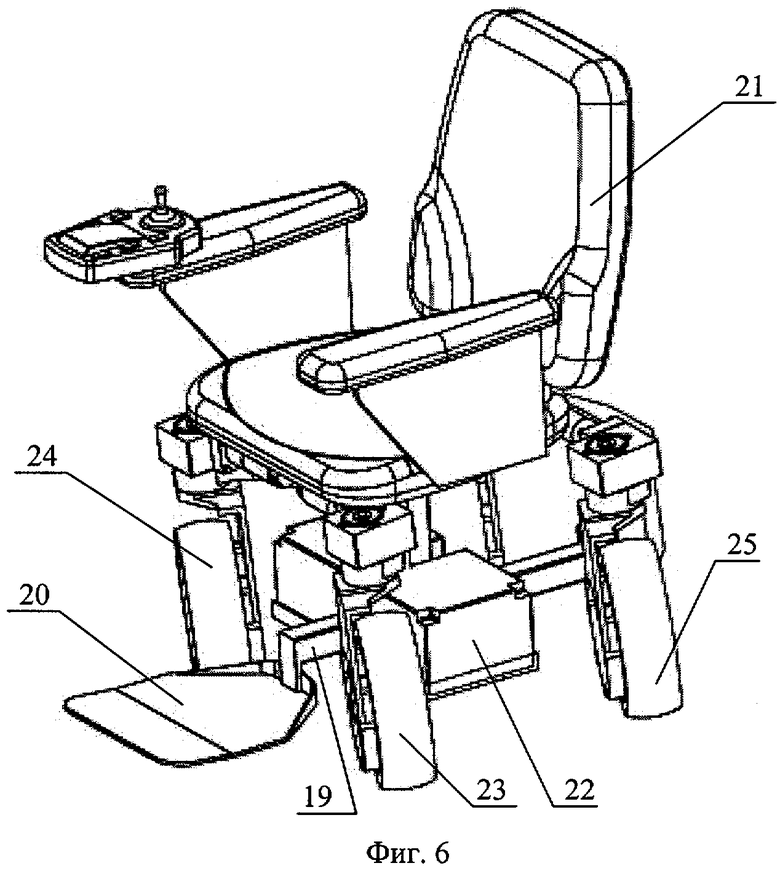
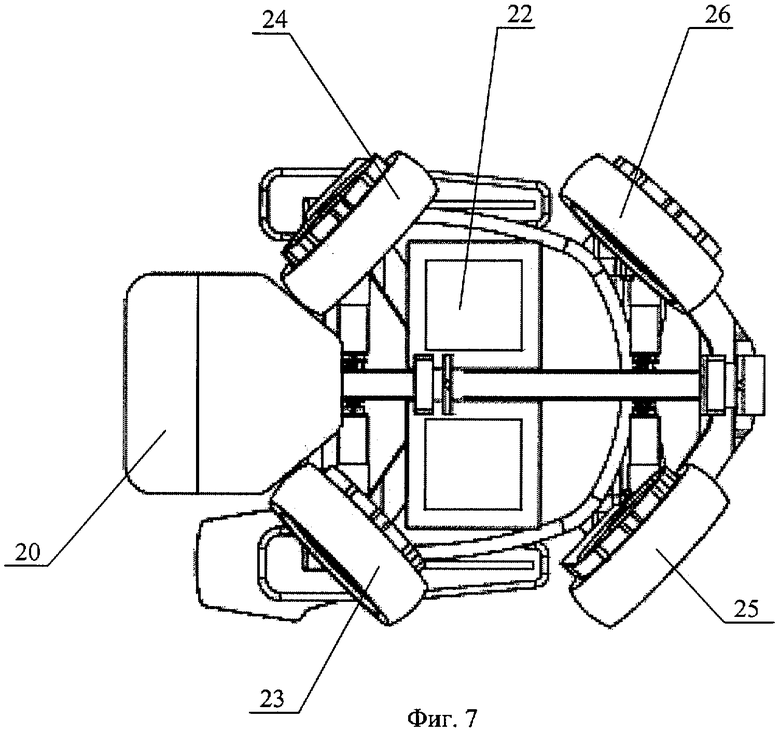
Четырехколесное транспортное средство имеет в своем составе рамную несущую конструкцию 19 с подножкой 20. На несущей конструкции установлено кресло 21, под сиденьем которого расположены аккумуляторы 22. Транспортное средство имеет два передних колеса 23, 24 и два задних колеса 25, 26. Опорами передних и задних колес могут служить стойки, выполненные в виде Г-образно изогнутых пластин, подобно тому, как это описано выше и представлено на Фиг.2. Горизонтальная полка каждой пластины неподвижно соединена с вертикальным выходным валом редуктора поворота данного колеса. Вал приводится в движение соответствующим электродвигателем. На вертикальной полке каждой стойки закреплено колесо: либо его ось, если колесо не является ведущим, либо двигатель колеса, если колесо является ведущим. Таким образом, между приводом поворота каждого колеса имеется связь с опорой колеса, имеющей вертикальную ось поворота. Опора колеса может быть выполнена в виде вилки, или в виде кронштейна, или в любом другом приемлемом конструкционном виде. В четырехколесном транспортном средстве ведущими колесами могут быть передние колеса, или задние колеса, или диагонально расположенные колеса, или все колеса. Управление колесами осуществляется от пульта управления, например, снабженного джойстиком. Пульт может быть закреплен на подлокотнике кресла.
Работа устройства и возможность реализации двух режимов, позволяющих минимизировать площадь для разворота и парковки транспортного средства, описана ниже и иллюстрируется Фиг.8-Фиг.19.
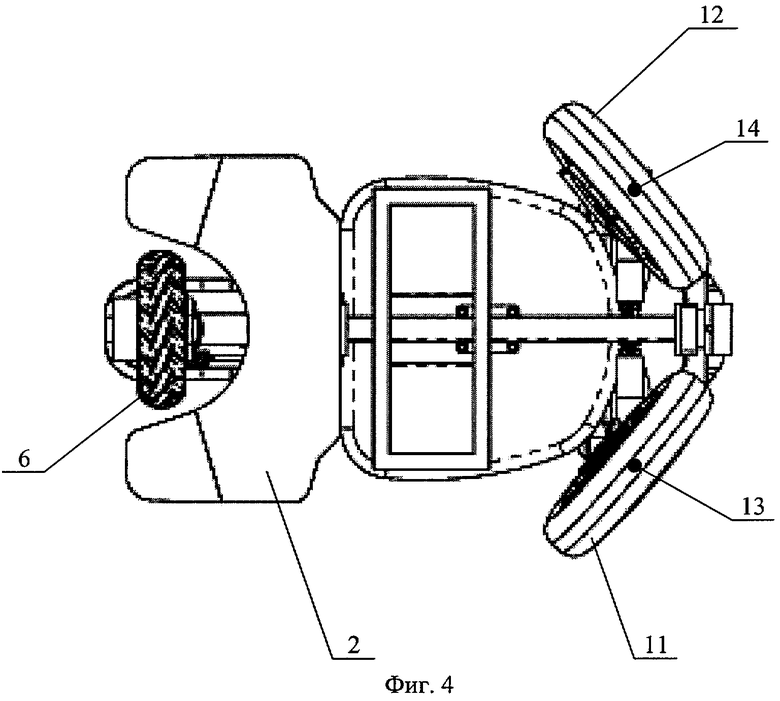
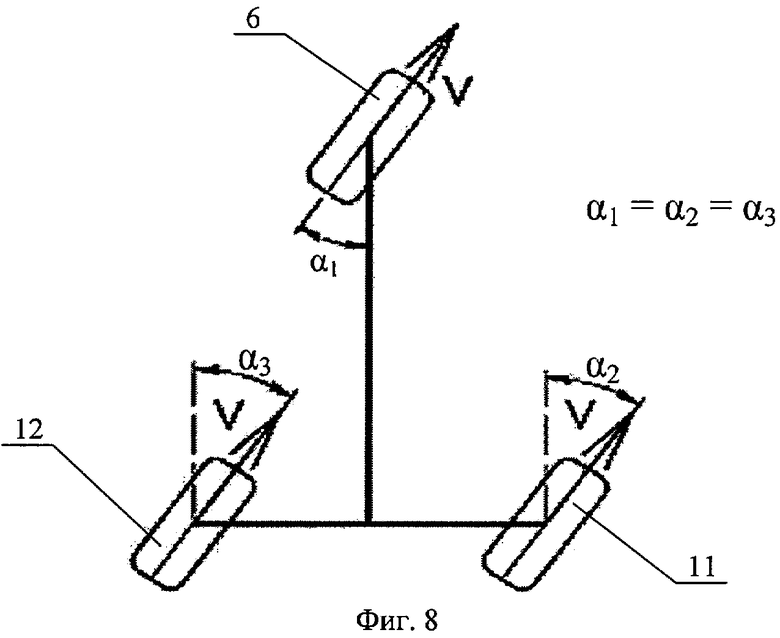
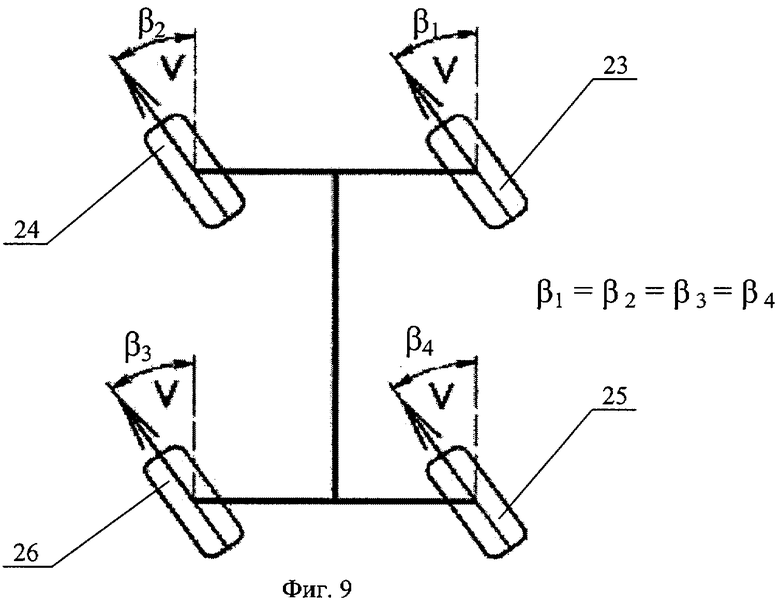
Транспортное средство (оба варианта) позволяет пользователю, например человеку с ограниченной подвижностью, осуществлять перемещения как в помещении, так и на улице. Траектория движения может быть прямой, а также с поворотами как в традиционном передне- или заднеуправляемом, так и в полноуправляемом средстве. Управление в трехколесном средстве осуществляется от рулевой колонки или от пульта, например, с джойстиком, четырехколесным - от пульта. Однако для парковки возможно применение режима движения бортом (крабом). Для осуществления такого движения все колеса посредством привода поворачиваются вокруг своих вертикальных осей одновременно на одинаковый угол. В трехколесном средстве α1=α2=α3, в четырехколесном соответственно β1=β2=β3=β4 (см. Фиг.8 и Фиг.9), движение происходит по прямой. При повороте колес на угол 90° возможно движение боком. Режим движения наиболее полезен при парковке транспортного средства, когда необходимо разместить его, к примеру, вдоль стены между уже установленными скутерами, автомобилями и т.д. и в других аналогичных ситуациях.
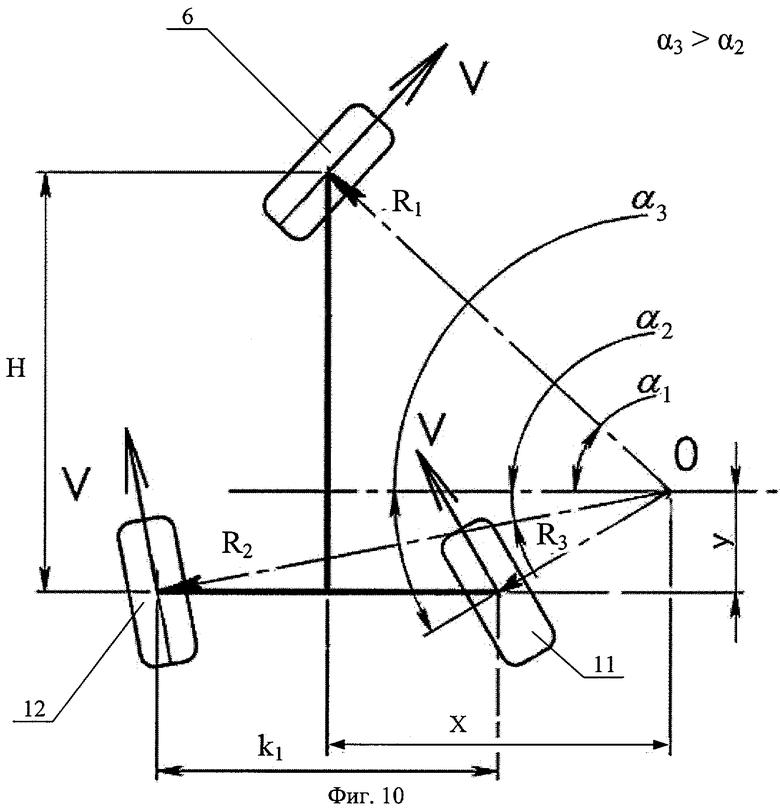
Второй режим (см. Фиг.10), повышающий маневренность транспортного средства - режим поворота. При этом система управления периодически считывает информацию с задающего органа (задающего колеса, имеющего ручной привод, джойстика и пр.), рассчитывает углы поворота управляемых колес и вырабатывает управляющие сигналы на соответствующие приводы. Точка О - центр поворота. Математически связь между управляемыми колесами трехколесного транспортного средства можно описать следующим образом:
где х - расстояние центра поворота О от проекции на опорную поверхность продольной плоскости симметрии транспортного средства,
y - расстояние центра поворота вдоль проекции на опорную поверхность продольной плоскости симметрии от проекции на опорную поверхность плоскости расположения вертикальных осей поворота задних колес (на Фиг.10 - координаты по горизонтали и по вертикали соответственно),
α2 - угол поворота колеса, едущего по дуге большего радиуса (наружное колесо),
α3 - угол поворота колеса, едущего по дуге меньшего радиуса (внутреннее колесо),
k1 - расстояние меду осями поворота задних колес,
α3>α2.
Так как колеса движутся каждое по своему радиусу (R1≠R2,≠R3), моменты на ведущих колесах и угловые скорости их различны, это также быть учтено в системе управления.
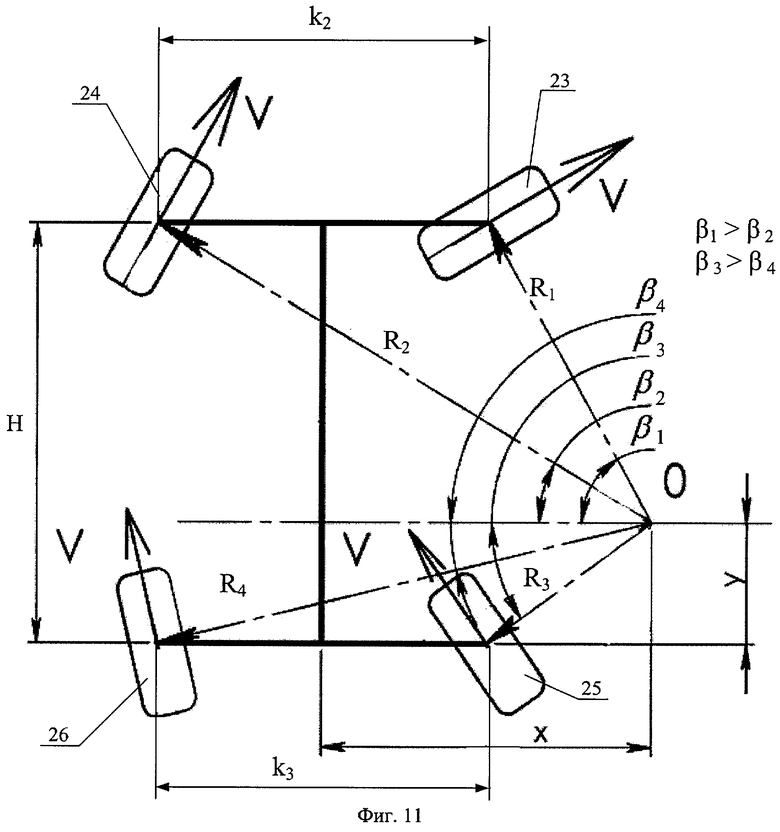
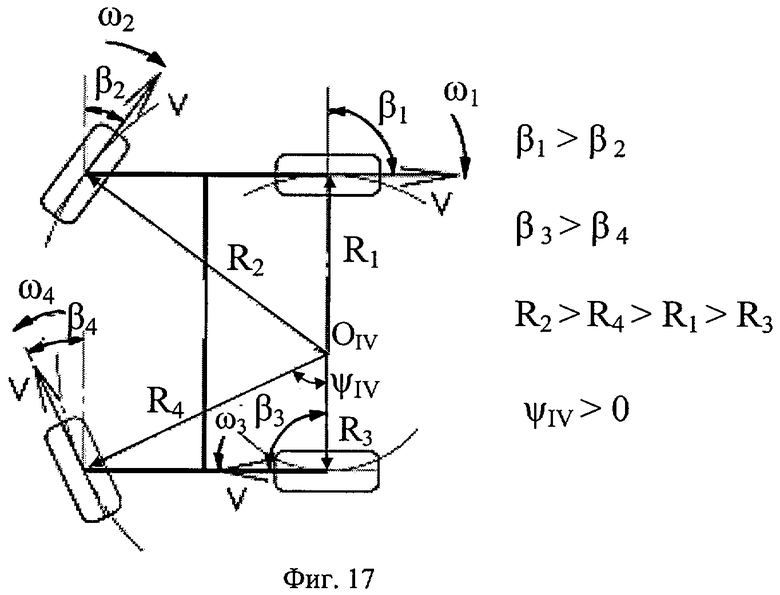
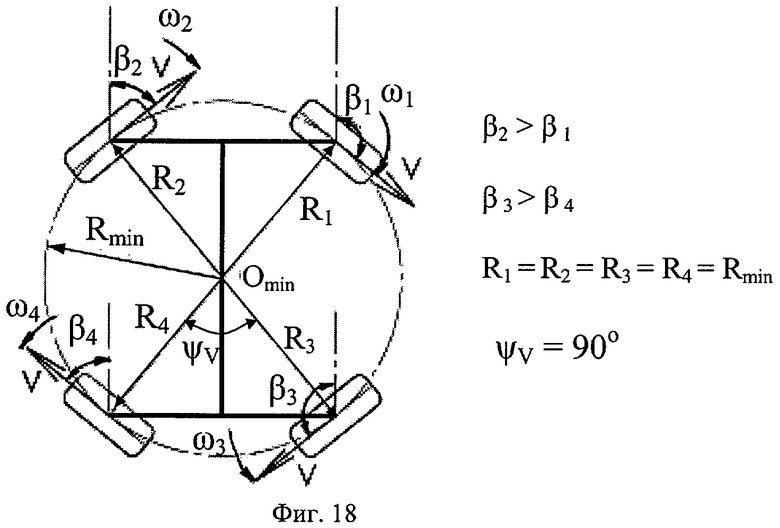
Для четырехколесного транспортного средства (см. Фиг.11) внутреннее переднее колесо имеет угол поворота β1, наружное переднее колесо - β2, внутреннее заднее колесо - β3, наружное заднее колесо - β4. Все углы отличны друг от друга (β1>β2, β3>β4,), их значения выражаются зависимостями:
где х - расстояние центра поворота О от проекции на опорную поверхность продольной плоскости симметрии транспортного средства,
y - расстояние центра поворота вдоль проекции на опорную поверхность продольной плоскости симметрии от проекции на опорную поверхность плоскости расположения вертикальных осей поворота задних колес (на Фиг.11 - координаты по горизонтали и по вертикали соответственно),
k2 - расстояние между осями поворота передних колес («колея» передних колес),
k3 - расстояние между осями поворота задних колес («колея» задних колес).
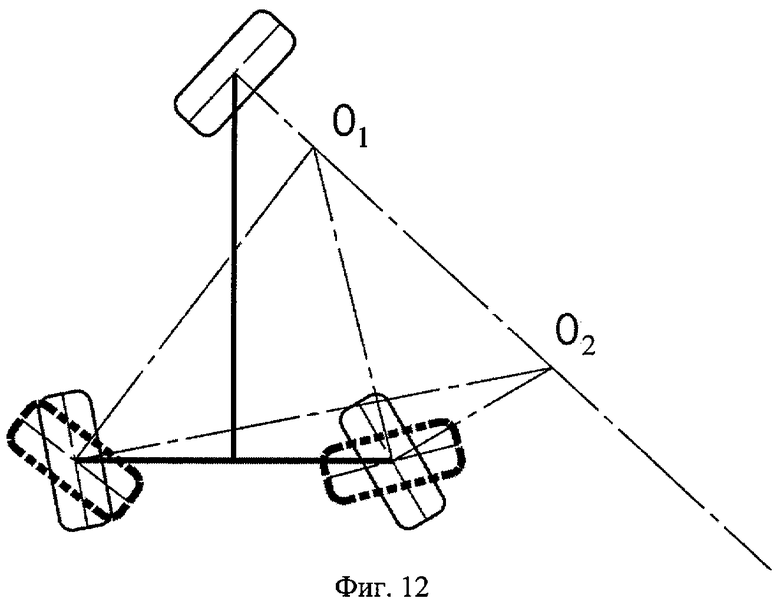
Для функционирования системы управления необходимо решить неопределенность связи между углами поворота колес, состоящую в том, что при повороте переднего колеса (для четырехколесного средства - при повороте передних колес) на определенный угол задние колеса могу иметь множество значений углов поворота, которым соответствуют различные положения центра поворота (к примеру, центры O1 и О2 на Фиг.12).
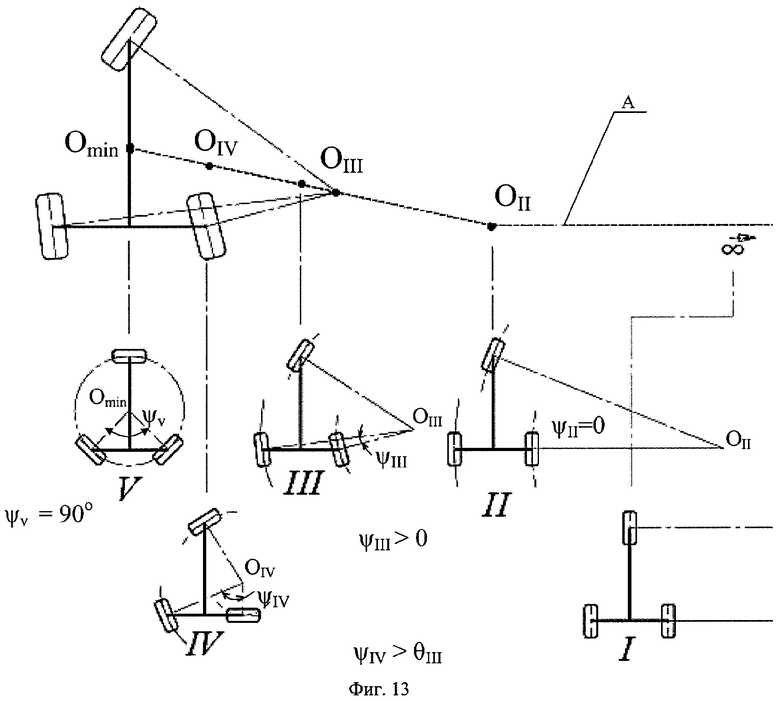
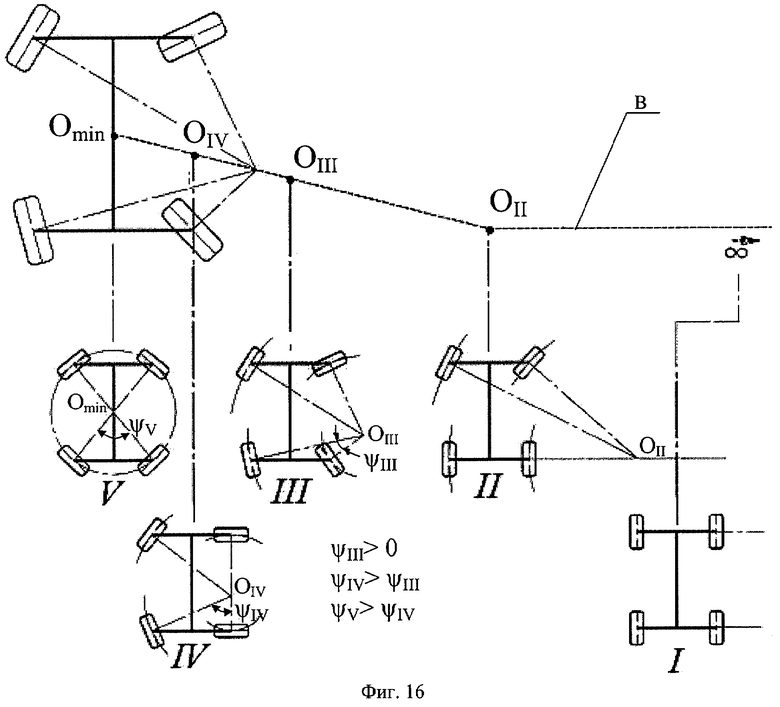
Эта неопределенность решается путем введения такого понятия, как «траектория движения» центра поворота. Траектория движения центра поворота - это геометрическое место точек расположения центра поворота для различных углов поворота транспортного средства. Она может выглядеть, например, как ломаная А и ломаная В на Фиг.13 и Фиг.16. Траектория центра поворота может изменяться в зависимости от скорости и/или иных параметров. Каждой точке кривой соответствует определенный радиус поворота для каждого колеса, что иллюстрируется сносками, схематично изображающими характерное положение колес транспортного средства. Позиции II-IV являются промежуточными от перемещения «по прямой» до вращения вокруг центра Оmin, лежащего на проекции на опорную поверхность продольной плоскости симметрии транспортного средства и равноудаленного от вертикальной оси поворота переднего колеса (для четырехколесного средства - равноудаленного от проекции на опорную поверхность плоскости расположения вертикальных осей поворота передних колес) и проекции на опорную поверхность плоскости расположения вертикальных осей поворота задних колес, а именно:
Позиция I - движение по прямой, центр поворота в бесконечности.
Позиция II (центр ОII) - поворот, традиционный для переднеуправляемого транспортного средства, - поворот переднего колеса (для четырехколесного - передних колес), задние следуют за ним по дуге, при этом не поворачиваются относительно продольной плоскости симметрии транспортного средства.
Наклонная часть кривой А и кривой В соответствует полноуправляемому режиму движения, при котором задние колеса поворачиваются.
Позиция III (центр ОIII) - поворот тремя колесами (для четырехколесного - четырьмя колесами) заявляемого средства по второму режиму. Оба задних колеса поворачиваются вокруг своих вертикальных осей поворота в противоположную сторону, чем переднее (для четырехколесного - чем передние) и с разной скоростью. Для трехколесного средства внутреннее заднее колесо поворачивается с большей скоростью, чем заднее наружное. Для четырехколесного - переднее внутреннее колесо поворачивается быстрее переднего наружного, а заднее внутреннее - быстрее заднего наружного.
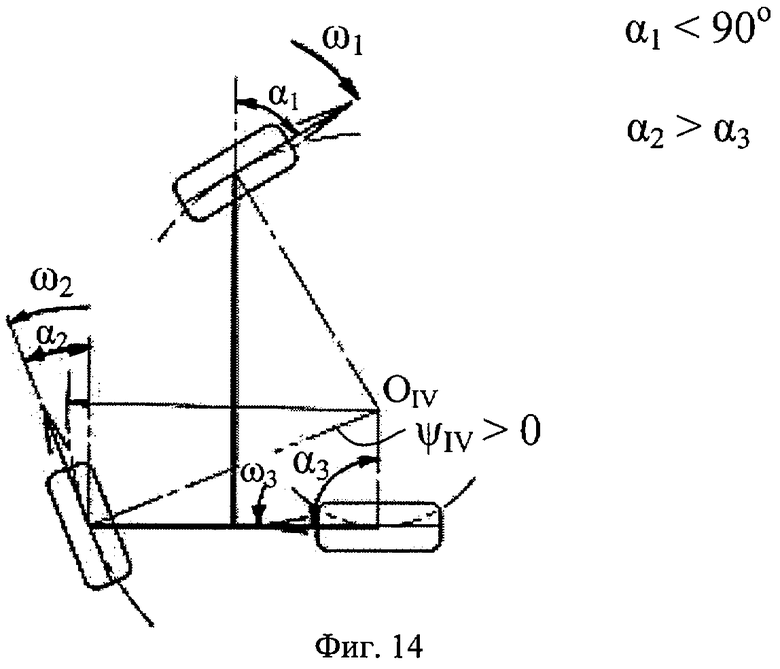
Позиция IV (центр OIV) - как позиция III, но по меньшему радиусу.
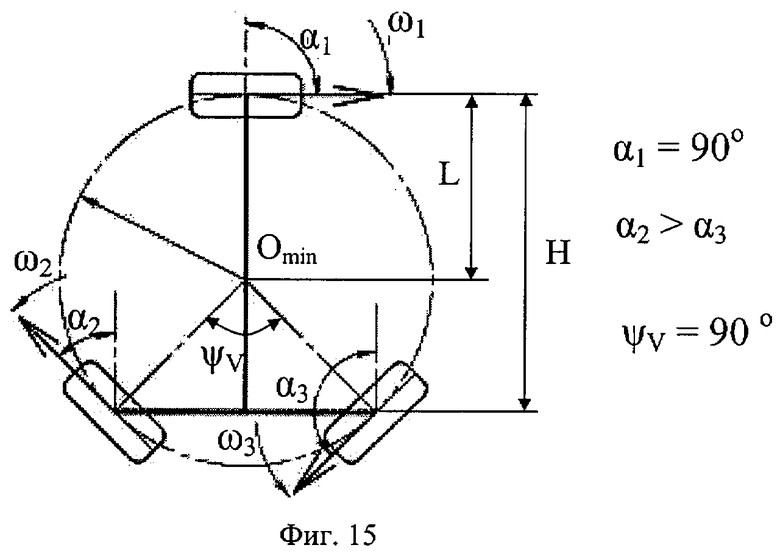
Позиция V (центр Оmin) - разворот на месте.
Следует отметить, что при повороте переднего колеса (для четырехколесного - при повороте передних колес) наступает момент, когда внутреннее заднее колесо ( для четырехколесного - внутреннее переднее колесо и внутреннее заднее колесо) устанавливается под углом 90° к проекции на опорную поверхность продольной плоскости симметрии транспортного средства (позиция IV на Фиг.13 и Фиг.16). Если после этого переднее колесо (для четырехколесного - переднее внутреннее колесо) продолжает поворачиваться далее до угла 90°, заднее внутреннее колесо (для четырехколесного - внутреннее переднее и внутреннее заднее колеса) поворачивается на угол, больший 90°. При этом, если центр поворота придет в точку Оmin, то линейная скорость всего аппарата будет равна нулю, однако угловые скорости всех колес ни в этот момент, ни в любой другой предшествующий момент времени не должны равняться нулю, т.е. для перехода в этот режим не требуется временная остановка ведущих колес аппарата.
Как видно из приведенных иллюстрирующих примеров, в отличие от обычного транспортного средства, осуществляющего поворот, как это показано на позиции II (проекции горизонтальных осей вращения всех колес на опорную поверхность сходятся в одной точке, являющейся центром поворота транспортного средства, при этом угол ψ между указанными проекциями для задних колес равен нулю), в заявляемом устройстве этот угол ψ отличен от нуля. В предельном случае, когда вращение осуществляется вокруг центра Оmin, угол ψ максимален. Однако возможно, а иногда желательно осуществлять поворот, когда центр вращения, хотя и находится на проекции на опорную поверхность продольной плоскости симметрии транспортного средства, но не совпадает с центром Оmin, а отстоит от вертикальной оси поворота переднего колеса на расстоянии L, которое задается интервалом L=(0,1÷0,9)Н, где Н - колесная база. Для четырехколесного средства возможный, а иногда желательный режим, когда центр поворота также находится на проекции на опорную поверхность продольной плоскости симметрии транспортного средства, но отстоит от проекции на опорную поверхность плоскости расположения вертикальных осей поворота передних колес на расстоянии М, которое определяется следующим соотношением М=(0,1÷0,9)Н, где Н - колесная база
Это объясняется индивидуальными особенностями конструкции транспортного средства, в частности местом расположения кресла.
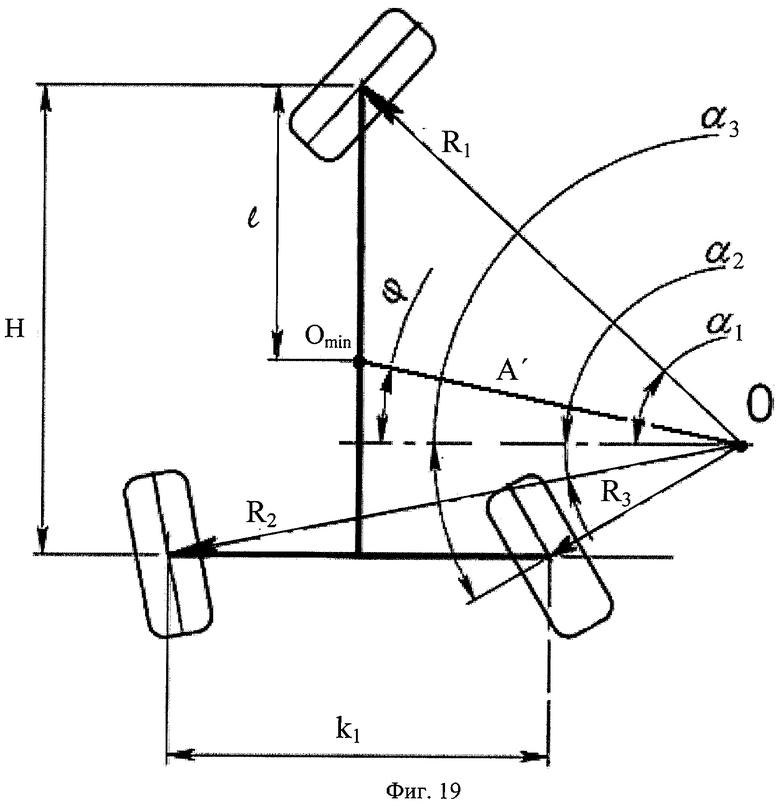
В заявляемом устройстве система управления задает углы поворота колес в зависимости от выбора режима движения (прямолинейное, поворот, движение «крабом») и положения задающего органа (угол поворота переднего колеса, угол отклонения рукоятки джойстика и т.д.) Для трехколесного транспортного средства в случае, если задающим элементом является переднее колесо, углы поворота двух задних колес α2, α3 определяются углом поворота переднего колеса α1, а также геометрическими характеристиками центра поворота. На участках траектории центра поворота, которые описываются как отрезки прямой «А» на Фиг.13 и более подробно - прямая «А′» на Фиг.19, эти зависимости могут быть выражены как
где α2 - угол поворота колеса, едущего по дуге большего радиуса (наружное колесо),
α3 - угол поворота колеса, едущего по дуге меньшего радиуса (внутреннее колесо),
k1 - расстояние меду осями поворота задних колес,
Н - колесная база,
ϕ - угол наклона линейного участка траектории А′ центра поворота к проекции на опорную поверхность плоскости расположения вертикальных осей поворота задних колес,
l - расстояние от оси поворота переднего колеса до точки пересечения траектории А′ центра поворота с проекцией на опорную поверхность продольной плоскости симметрии транспортного средства.
Указанные зависимости, как и возможные многочисленные другие зависимости, описывающие движение транспортного средства, «заложены» в систему управления транспортного средства и реализуются механизмами поворота управляемых колес. Это позволяет придать транспортному средству повышенную маневренность, в частности минимизировать площадь разворота и парковки транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПЕРАТИВНОГО ИЗМЕНЕНИЯ КОЛЕИ САМОХОДНОГО КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНОЕ КОЛЕСНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381127C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО ПОДЪЕМА ПО ЛЕСТНИЧНЫМ МАРШАМ | 2001 |
|
RU2215510C2 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2217119C1 |
| ТРАНСФОРМИРУЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2297206C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ПРЕОДОЛЕНИЯ ИМ ЛЕСТНИЧНЫХ МАРШЕЙ (ВАРИАНТЫ) | 2000 |
|
RU2200526C2 |
| ШАССИ ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ДВИЖЕНИЯ, В ЧАСТНОСТИ, ПО ЛЕСТНИЦАМ | 2005 |
|
RU2312788C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕИМУЩЕСТВЕННО ДЛЯ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА ПО ЛЕСТНИЦАМ | 2008 |
|
RU2368366C1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ЧЕЛОВЕКА С ДИСФУНКЦИЕЙ НИЖНИХ КОНЕЧНОСТЕЙ В САМОХОДНОЙ КОЛЯСКЕ НА ЛЕСТНИЦЕ С ПОРУЧНЯМИ | 2010 |
|
RU2417787C1 |
Изобретение относится к высокоманевренным транспортным средствам и может быть использовано для перемещения людей с ограниченной подвижностью в помещениях и на улице. Самоходное транспортное средство содержит несущую конструкцию с закрепленным креслом, источником питания, передним поворотным колесом, двумя задними колесами и системой управления. Каждое заднее колесо снабжено приводом для независимого поворота вокруг вертикальной оси. Каждый привод закреплен на задней части несущей конструкции и взаимосвязан с опорой колеса с вертикальной осью поворота. Приводы поворота колес выполнены с возможностью реализации как минимум двух режимов движения. Первый режим движения - это режим поворота задних колес синхронно и на одинаковый угол с передним колесом. При втором режиме поворота задних колес проекции горизонтальных осей вращения всех колес на опорную поверхность сходятся в одной точке. Точка является центром поворота транспортного средства. Угол между проекциями для задних колес отличен от нуля. При втором режиме центр поворота находится на продольной оси проекции на опорную поверхность продольной плоскости симметрии транспортного средства и отстоит от вертикальной плоскости поворота переднего колеса на расстоянии L, определяемом интервалом от L=0,1Н до L=0,9Н, где Н - колесная база. В результате конструкция имеет повышенную маневренность и позволяет минимизировать площадь для разворота и парковки транспортного средства. 2 н. и 13 з.п. ф-лы, 19 ил.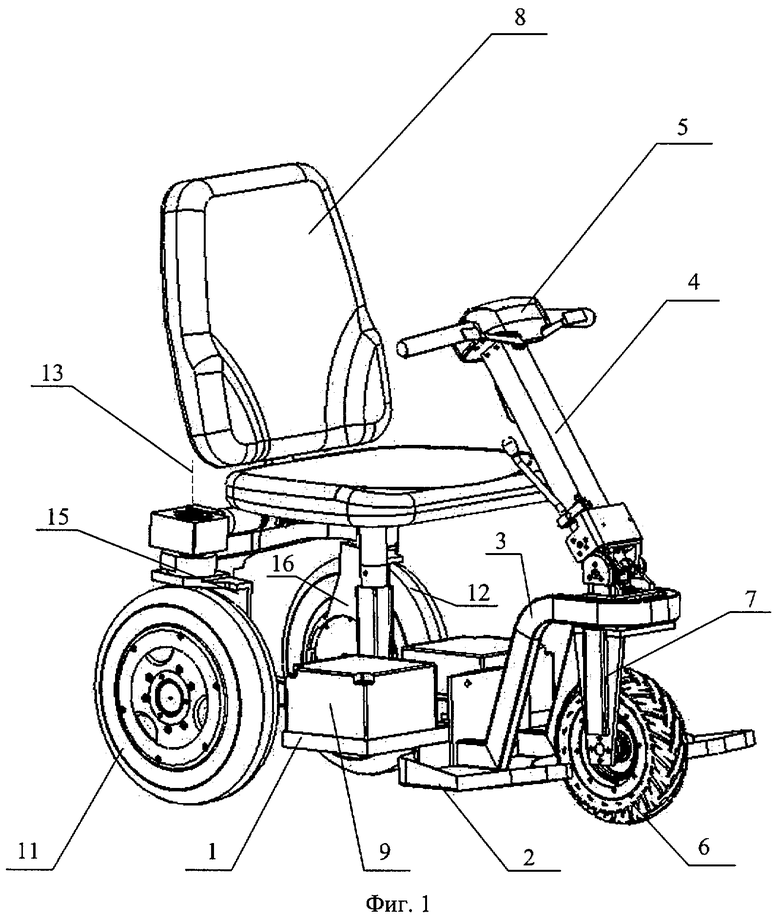
| Инструкция по эксплуатации BRUNO INDEPENDENT LIVING AIDS, INC S/N 98120200122 | |||
| Каталог фирмы WILHELM MEYER GMBH&Co, №3/95 DC, с.182 | |||
| US 5022476 A, 11.06.1991 | |||
| ИНВАЛИДНАЯ КОЛЯСКА | 1994 |
|
RU2076673C1 |
| Способ передвижения инвалидной коляски и инвалидная коляска | 1988 |
|
SU1602529A1 |

