Изобретение относится к области транспортного машиностроения, в частности к способам управления извне оператором при помощи пульта управления поворотом транспортного средства, предназначенного для перевозки крупногабаритных грузов и представляющего собой сочлененные друг с другом посредством грузонесущей рамы или непосредственно самим грузом двух платформ с автономными приводами поворота колес и индивидуальными силовыми установками.
Известен способ управления многозвенным транспортным средством, обеспечивающий следование ведомых звеньев транспортного средства по траектории ведущего звена, при этом траектория записывается на проезжую часть, содержащую частицы магнитного вещества по всей ширине, при помощи магнитной головки, расположенной на ведущем звене. Ведомые звенья при помощи магнитных головок считывают траекторию движения и, посредством исполнительных сервомеханизмов, воспроизводят движение по траектории ведущего звена (см. патент РФ №2041104, МПК B62D 13/04, опубл. 1995 г.).
К недостаткам данного способа можно отнести то, что он может не обеспечить надежную работу при движении по загрязненной проезжей части, позволяет реагировать на различные металлические предметы, которые случайным образом могут на ней оказаться, и не обеспечивает движение данного комплекса по неподготовленным дорогам.
Также известен способ управления транспортным средством, имеющим переднюю и заднюю поворотные тележки, заключающийся в том, что определяют и запоминают траекторию передней тележки в виде ряда значений углов взаимного расположения последовательных элементарных участков и поворачивают заднюю тележку в сторону траектории передней тележки. При этом заднюю тележку направляют к концу элементарного участка траектории передней тележки, начало которого отстоит от этой тележки на расстоянии, равном по хорде длине рамы (см. а.с. СССР №582130, МПК B62D 13/00, опубл. 1977 г.).
Однако данный способ не обеспечивает надежного движения задней поворотной тележки по траектории передней поворотной тележки на переходных траекториях движения. Кроме того, данный способ не будет корректно работать при радиусах поворота, сопоставимых с длинной перевозимого груза.
Известен принятый в качестве прототипа способ автоматического отслеживания траектории движения ведомого звена сочлененного транспортного средства, которое состоит из ведущего и ведомого тягачей, рамы для перевозки груза, при этом тягачи практически идентичны по конструкции, а рама закреплена на тягачах при помощи механических шарниров. Способ заключается в том, что значение угла складывания между ведущим тягачом и грузонесущей рамой усредняется по времени и, в качестве функции от пройденного пути, сравнивается со значением угла между грузонесущей рамой и ведомым тягачом. Если усредненный по времени угол между ведущим тягачом и грузонесущей рамой совпадает с углом между грузонесущей рамой и ведомым тягачом, то считается, что задача движения ведомого звена по траектории ведущего выполнена (см. патент США №4399884, МПК B62D 15/00, опубл. 1983 г.).
Данное изобретение имеет следующие недостатки:
1) способ управления не учитывает переходные траектории движения, которые проходит транспортное средство при входе в поворот и выходе из него;
2) способ управления не учитывает изменение скорости движения ведомого тягача относительно ведущего при движении транспортного средства по криволинейной траектории.
Технической задачей, на решение которой направленно данное изобретение, является совпадение траекторий движения ведущей и ведомой платформ при движении по криволинейным траекториям в составе транспортного средства с учетом участков переходных траекторий при входе в поворот и выходе из него, а также одновременного учета изменения скорости движения ведомой платформы относительно ведущей при прохождении ею криволинейных траекторий для снижения нежелательных нагрузок на перевозимый груз.
Решение поставленной технической задачи достигается тем, что в способе управления движением сочлененного транспортного средства, состоящего из ведущей и ведомой платформ, которые шарнирно соединены между собой посредством грузонесущей рамы или непосредственно перевозимым грузом, колеса каждой из которых выполнены ведущими и снабжены приводами поворота колес, заключающемся в том, что с помощью датчиков, входящих в состав системы управления, постоянно фиксируют параметры движения платформ, в том числе путь и углы складывания между продольной осью каждой из платформ и продольной осью грузонесущей рамы или перевозимого груза, при помощи системы управления осуществляют необходимые расчеты для выработки сигнала управления поворотом колес ведомой платформы для ее следования по траектории ведущей платформы, согласно изобретению дополнительно на этапе движения ведущей платформы по криволинейной траектории отслеживают курсовой угол каждой платформы как его приращение относительно общей неподвижной системы координат, начало которой совпадает с соответствующим этапом переходной траектории, контролируют скорость движения ведомой платформы относительно ведущей и рассчитывают параметры поворота ведомой платформы, такие как углы поворота колес, а также момент начала ее движения по криволинейной траектории в зависимости от расстояния между двумя платформами, одновременно с этим производят расчет координат траектории движения геометрического центра ведущей платформы по криволинейной траектории, которые далее, наряду с параметрами, поступающими с датчиков, учитывают при движении ведомой платформы по траектории ведущей, отслеживая значения координат их геометрических центров.
Решение поставленной технической задачи достигается тем, что в дополнение к выполняемой системой управления функции отслеживать курсовые углы, пройденный путь каждой из платформ, а также углы складывания между сочлененными с грузонесущей рамой или перевозимым грузом ведущей и ведомой платформами согласно заявленному способу предполагается отслеживать также скорость движения ведомой платформы относительно ведущей при одновременном вычислении координат движения последней по криволинейной траектории с учетом общей точки отсчета, совпадающей с началом криволинейной траектории. Это позволяет в зависимости от скорости движения, углов складывания и курсовых углов определить момент входа ведомой платформы на криволинейную траекторию в той же точке, в которой движение по криволинейной траектории начала ведущая платформа. Поскольку далее постоянно осуществляется контроль и сравнение координат траектории движения ведомой платформы относительно ведущей для одной и той же точки на криволинейной траектории, в том числе и на переходной, то в процессе движения система управления вырабатывает сигнал на приводы поворота колес ведомой платформы для следования последней по траектории, совпадающей с ранее определенной траекторией ведущей платформы. При таком способе обеспечивается по существу следование платформ по одной и той же криволинейной траектории и регулирование скорости движения ведомой платформы во избежание возникновения неблагоприятных нагрузок на перевозимый груз.
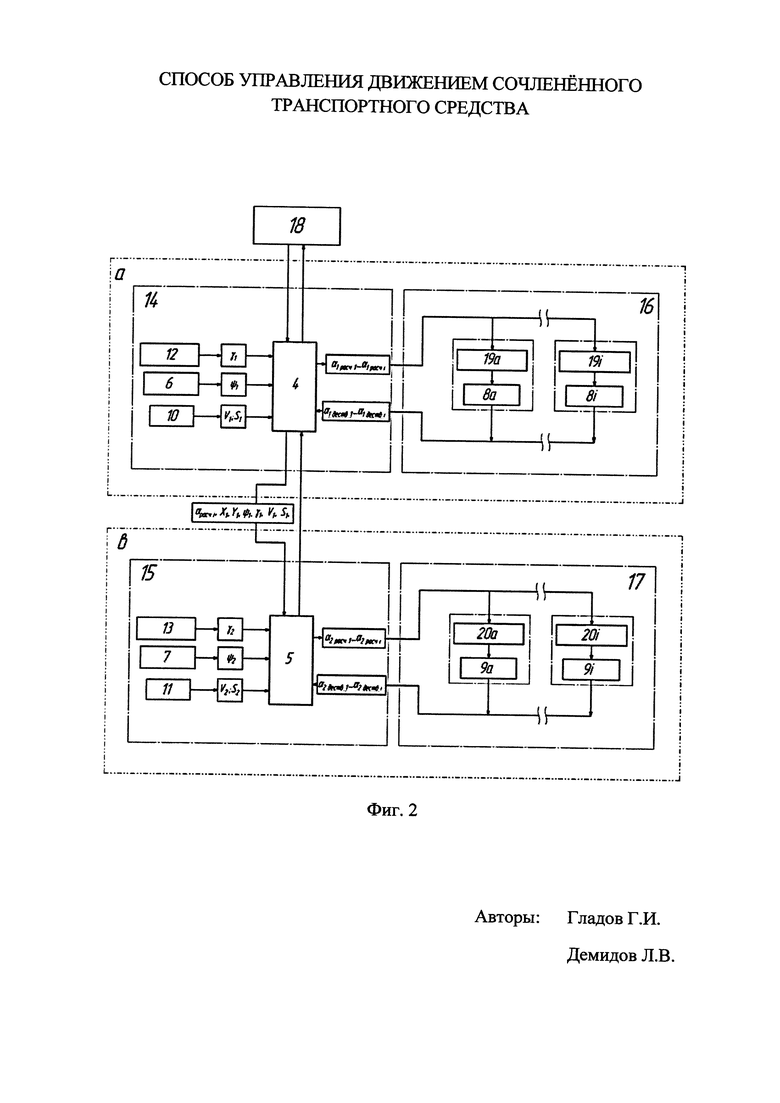
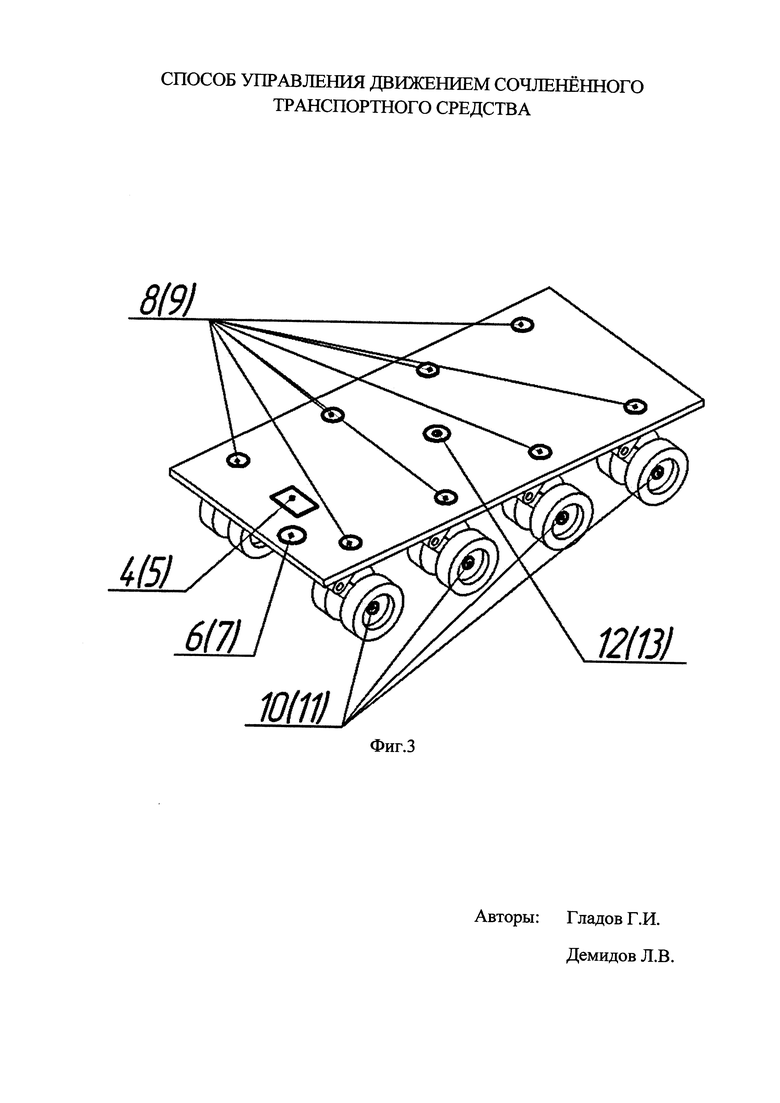
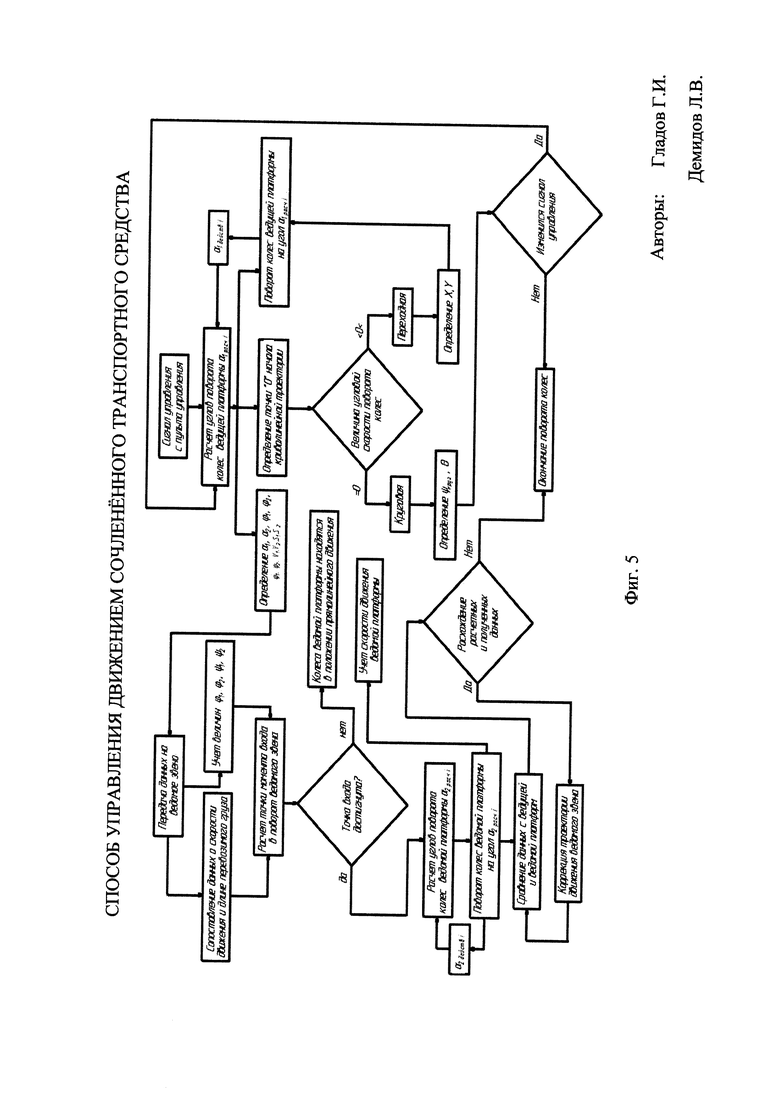
Изобретение поясняется чертежами, где на фиг. 1 представлен общий вид сочлененного транспортного средства в аксонометрической проекции, состоящего из ведомой и ведущей платформ; на фиг. 2 приведена схема системы управления; на фиг. 3 изображен общий вид одной из платформ в аксонометрической проекции; на фиг. 4 показана схема движения сочлененного транспортного средства по криволинейной траектории с указанием контролируемых параметров движения; на фиг. 5 изображена блок-схема работы системы управления.
На чертежах приняты следующие обозначения:
α1 расч i, α2 расч i - расчетные углы поворота колесных опор соответственно ведущей и ведомой платформ;
α1 действ i, α2 действ i - действительные углы поворота колесных опор соответственно ведущей и ведомой платформ;
φ1, φ2 - соответствующие углы складывания продольных осей ведущей и ведомой платформ относительно продольной оси грузонесущей рамы или груза;
ψ1, ψ2 - курсовой угол соответственно ведущей и ведомой платформ;
V1, S1 и V2, S2 - соответственно скорость и пройденный путь ведущей и ведомой платформ;
X, Y - координаты геометрического центра платформы при ее движении по криволинейной траектории.
Способ управления движением применим к сочлененному транспортному средству, которое состоит из идентичных ведущей и ведомой платформ 1 и 2. Последние между собой соединены шарнирно посредством грузонесущей рамы или непосредственно перевозимым грузом 3 (см. фиг. 1). При этом колеса каждой из них выполнены ведущими и снабжены приводами поворота колес (на чертеже не показаны). Управление движением такого транспортного средства осуществляется извне оператором с пульта управления.
Способ управления движением сочлененного транспортного средства реализуется с помощью системы управления, которая состоит из двух контуров а и b, относящихся к ведущей и ведомой платформам 1 и 2 соответственно (см. фиг. 2 и 3). При этом каждый контур а и b содержит соответствующий контроллер 4 и 5, к каждому из которых подключены датчики 6 и 7 курсовых углов ψ1 и ψ2 соответственно, а также датчики 8 и 9 углов поворота α1 действ i и α2 действ i колесных опор, датчики 10 и 11 скорости движения V1 и V2 и датчики 12 и 13 углов складывания φ1 и φ2. В системе управления выделены командные и силовые части 14; 15 и 16; 17 соответственно. В состав командных частей 14 и 15 входят микроконтроллеры 4 и 5, при этом к микроконтроллеру 4 ведущей платформы 1 подключено устройство 18 управления, вырабатывающее управляющие сигналы по команде оператора, идущего рядом с транспортным средством при его движении. При этом платформы 1 и 2 транспортного средства приводятся в движение при помощи индивидуальных двигателей (на чертеже не показаны).
Микроконтроллер 4 связан с приводами поворота колес - двигателями 19а…i поворота колес и датчиками 8а…i углов поворота α1…действ i, входящих в силовую часть 16, для обеспечения обратной связи. Кроме этого, в микроконтроллер 4 ведущей платформы 1 поступают сигналы от датчиков 6 и 12 угла складывания φ1 и курсового угла ψ1, а также от датчика 10 скорости движения V1. Микроконтроллер 5 ведомой платформы 2 подсоединен к контроллеру 4. К микроконтроллеру 5 также подсоединены датчики 7 и 13 угла складывания φ2 и курсового угла ψ2, а также датчик 11 скорости движения V2, которые образуют командную часть 15 системы управления ведомой платформы 2. В свою очередь, контроллер 5 связан с приводами поворота колес - двигателями 20а…i поворота колес и датчиками 9а…i углов поворота α2 действ i, входящих в силовую часть 17, для обеспечения обратной связи.
В процессе движения транспортного средства фиксируют точку вхождения последнего на криволинейную траекторию, которую рассматривают как начальную точку «0» общей неподвижной системы 21 координат, в которой ось абсцисс X ориентирована по направлению 22 прямолинейного движения (см. фиг. 4). При этом транспортное средство движется первоначально по переходной траектории 23, которая затем может переходить в круговую траекторию 24.
Способ управления движением транспортного средства заключается в том, что с помощью датчиков, входящих в состав системы управления, постоянно фиксируют параметры движения ведущей и ведомой платформ: путь и углы складывания между продольными осями ведущей и ведомой платформ и продольной осью грузонесущей рамы или перевозимого груза. При помощи системы управления осуществляют необходимые расчеты для выработки сигнала управления поворотом колес ведомой платформы для ее следования по траектории ведущей платформы. При этом дополнительно на этапе движения ведущей платформы по криволинейной траектории отслеживают курсовой угол каждой платформы как его приращение относительно общей неподвижной системы координат, начало которой совпадает соответствующим этапом переходной траектории. Одновременно контролируют скорость движения ведомой платформы относительно ведущей. На этапе движения ведущей платформы по криволинейной траектории с помощью системы управления рассчитывают параметры поворота ведомой платформы: угол поворота колес, а также момент начала ее движения по криволинейной траектории в зависимости от расстояния между двумя платформами. Одновременно производят расчет координат траектории движения геометрического центра как ведущей, так и ведомой платформ по криволинейной траектории, которые далее наряду с параметрами, поступающими с датчиков, учитывают при движении ведомой платформы по траектории ведущей.
Работа системы управления осуществляется согласно алгоритму, представленному на фиг. 5, следующим образом.
Сигнал о начале изменения траектории движения от устройства 18 управления, посланный оператором с пульта управления, поступает на микроконтроллер 4 системы управления, входящий в командную часть 14 ведущей платформы 1 (см. фиг. 2). При этом отслеживается величина сигнала, исходя из которой микроконтроллер 4 рассчитывает углы поворота α1 расч i колес ведущей платформы 1. Далее сигнал на поворот поступает на приводы поворота колес - двигатели 19a…i поворота колес, входящие в силовую часть 16 ведущей платформы 1, которые поворачивают колеса на необходимый угол, при этом действительные углы поворота α1 действ i измеряются датчиками 8а…i углов поворота, обеспечивая таким образом обратную связь. Также в момент начала поворота ведущей платформы 1 микроконтроллер 4 начинает сбор параметров движения ведущей платформы 1 при помощи датчиков 6, 10, 12, а микроконтроллер 5, входящий в командную часть 15 ведомой платформы 2, начинает сбор параметров движения при помощи датчиков 7, 11, 13. Одновременно с началом поворота колес микроконтроллер 4 ведущей платформы 1 отмечает общую точку отсчета «0» - начала движения по криволинейной траектории, привязывая к ней неподвижную систему 21 координат (см. фиг. 4), ось абсцисс X которой ориентирована параллельно траектории 22 прямолинейного движения. Далее при движении ведущей платформы 1 по криволинейной траектории можно выделить два случая движения: движение по переходной траектории 23 и движение по круговой траектории 24. При движении по переходной траектории 23 координаты X, Y геометрического центра ведущей платформы 1 относительно неподвижной системы 21 координат, совпадающей с точкой «0» начала поворота, можно вычислить по формулам:

где kп - режимный параметр [рад/м] [1, с. 16];
α1 - угол поворота задающего колеса [°];
b - кратчайшее расстояние от задающего колеса до центральной точки [м]. Параметр kп количественно определяет управляющее воздействие оператора, в результате которого транспортное средство двигается по криволинейной траектории.
Вычисляя данные координаты через определенные промежутки времени, микроконтроллер 4 определяет переходную траекторию движения ведущей платформы как массив точек с координатами (X, Y).
В случае, если угловая скорость поворота колес ведущей платформы 1 равна нулю, что соответствует режиму окончания движения по переходной траектории, микроконтроллер 4 системы управления начинает определять траекторию движения ведущей платформы 1, считая ее круговой, по следующей зависимости:
ψкруг=ψперех+θ,
 .
.
где ψперех - максимальный курсовой угол, достигнутый при движении по переходной траектории [°];
θ - приращение курсового угла на круговой траектории [°];
R1min - минимальный радиус поворота [м];
Sкруг - путь, пройденный по круговой траектории [м];
ψкруг - текущее значение курсового угла ведущей платформы [°].
Сигналом к окончанию движения по круговой траектории 24 служит сигнал управления, который формирует команду на поворот колес ведущей платформы 1. При этом в точке выхода с круговой траектории 24 микроконтроллер 4 ведущей платформы 1 снова привязывает к ней неподвижную систему координат, ось абсцисс X которой направлена по касательной к круговой траектории, а ось ординат Y перпендикулярна ей. Далее процесс определения траектории движения повторяется таким же образом, как при входе в поворот. При этом учет координат и параметров движения ведут по отношению к геометрическому центру как ведущей, так и ведомой платформ 1 и 2.
Во время начала поворота ведущей платформы 1 на микроконтроллер 5 ведомой платформы 2 поступает информация о начале ее поворота, при этом микроконтроллер 5 сопоставляет данные о скорости движения и длине перевозимого груза 3, а также учитывает величины углов складывания φ1 и φ2 и курсовых углов ψ1 и ψ2 для расчета времени достижения точки входа в поворот. При достижении точки входа в поворот ведомой платформой 2 микроконтроллер 5 дает команду, основываясь на информации, поступившей от микроконтроллера 4 ведущей платформы, на поворот колес на определенный угол α2 расч i приводам поворота, а именно двигателям 20а…i поворота колес, входящих в силовую часть 17, которые поворачивают колеса на необходимый угол, при этом действительные углы α2 действ i поворота контролируются датчиками 9а…i углов поворота, обеспечивая, таким образом, обратную связь и учитывая при этом текущую скорость движения V2 ведомой платформы 2, которая рассчитывается по формуле:
 ,
,
где l1 - расстояние между колесами первой и второй осей ведущей платформы [м];
l2 - расстояние между колесами первой и второй осей ведомой платформы [м];
L1 - расстояние от передней оси до полюса поворота ведущей платформы [м];
L2 - расстояние от передней оси до полюса поворота ведомого платформы [м].
Таким образом, платформа 2, двигаясь со скоростью V2, рассчитанной в соответствии с параметрами движения транспортного средства, позволяет избежать нежелательных нагрузок на грузонесущую раму или перевозимый груз при движении транспортного средства по криволинейной траектории.
При движении по криволинейной траектории колеса ведомой платформы 2 поворачивают на такие же углы, как и колеса ведущей платформы 1. При этом микроконтроллер 5 сравнивает данные, вычисленные на основе информации с датчиков 7, 9, 11 и 13 ведомой платформы 2, с данными, полученными от микроконтроллера 4 ведущей платформы 1. При расхождении данных на величину, превышающую допустимую ошибку, микроконтроллер 5 вырабатывает сигнал, корректирующий траекторию движения ведомой платформы, а именно доворачивает колеса ведомого звена до необходимого по расчету угла. В результате достигается необходимая точность движения ведомой платформы 2 по траектории ведущей платформы 1 не только на круговых траекториях 24, но и на переходных траекториях 23 как при входе в поворот, так и при выходе из него. При этом колеса каждой отдельной оси ведомой платформы 2 будут двигаться по траектории, с большой вероятностью совпадающей с траекторией движения колес соответствующей оси ведущей платформы 1. Кроме того, изменение скорости движения V2 ведомой платформы 2 относительно скорости V1 ведущей платформы 1 позволяет не допускать возникновения неблагоприятных нагрузок на грузонесущую раму или перевозимый груз 3.
Таким образом, изобретение позволяет достигнуть совпадения траекторий движения ведущей и ведомой платформ при движении по криволинейным траекториям с учетом участков переходных траекторий, а также одновременного изменения скорости движения ведомой платформы относительно ведущей для снижения нежелательных нагрузок на грузонесущую раму или перевозимый груз.
Источники информации
1. Закин, Я.Х. Маневренность автомобиля и автопоезда / Я.Х. Закин. - М.: Машиностроение, 1986. - 136 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ТОРМОЗНЫХ СИЛ НА КОЛЕСАХ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2028227C1 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| Транспортное средство для перевозки крупногабаритных грузов | 1987 |
|
SU1437267A1 |
| Способ распределения крутящих моментов, подводимых к колесам двухосных полноприводных транспортных средств с шарнирно-сочленённой рамой | 2023 |
|
RU2814698C1 |
| Транспортное средство для перевозки крупногабаритных грузов | 1984 |
|
SU1177187A1 |
| Автопоезд для перевозки длинномерных грузов | 1977 |
|
SU715371A1 |
| ПРИВОДИМАЯ ХОДОВАЯ ЧАСТЬ С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2347707C2 |
| Устройство для автоматической блокировки вертикального шарнира сцепки тягача с прицепным звеном | 1987 |
|
SU1411203A1 |


Предложен способ управления движением сочлененного транспортного средства, состоящего из ведущей и ведомой платформ (1, 2), которые шарнирно соединены между собой посредством грузонесущей рамы или непосредственно перевозимым грузом (3), колеса каждой из которых выполнены ведущими и снабжены приводами поворота колес. С помощью датчиков, входящих в состав системы управления, постоянно фиксируют параметры движения платформ, в том числе путь и углы складывания между продольной осью каждой из платформ и продольной осью грузонесущей рамы или перевозимого груза. При помощи системы управления осуществляют необходимые расчеты для выработки сигнала управления поворотом колес ведомой платформы для ее следования по траектории ведущей платформы. На этапе движения ведущей платформы по криволинейной траектории отслеживают курсовой угол каждой платформы как его приращение относительно общей неподвижной системы координат, начало которой совпадает с соответствующим этапом переходной траектории. Контролируют скорость движения ведомой платформы относительно ведущей и рассчитывают параметры поворота ведомой платформы, такие как углы поворота колес, а также момент начала ее движения по криволинейной траектории в зависимости от расстояния между двумя платформами. Одновременно с этим производят расчет координат траектории движения геометрического центра ведущей платформы по криволинейной траектории, которые далее, наряду с параметрами, поступающими с датчиков, учитывают при движении ведомой платформы по траектории ведущей, отслеживая значения координат их геометрических центров. Достигается совпадение траекторий движения ведущей и ведомой платформ при движении по криволинейным траекториям в составе транспортного средства с учетом участков переходных траекторий при входе в поворот и выходе из него, а также одновременного учета изменения скорости движения ведомой платформы относительно ведущей при прохождении ею криволинейных траекторий для снижения нежелательных нагрузок на перевозимый груз. 5 ил.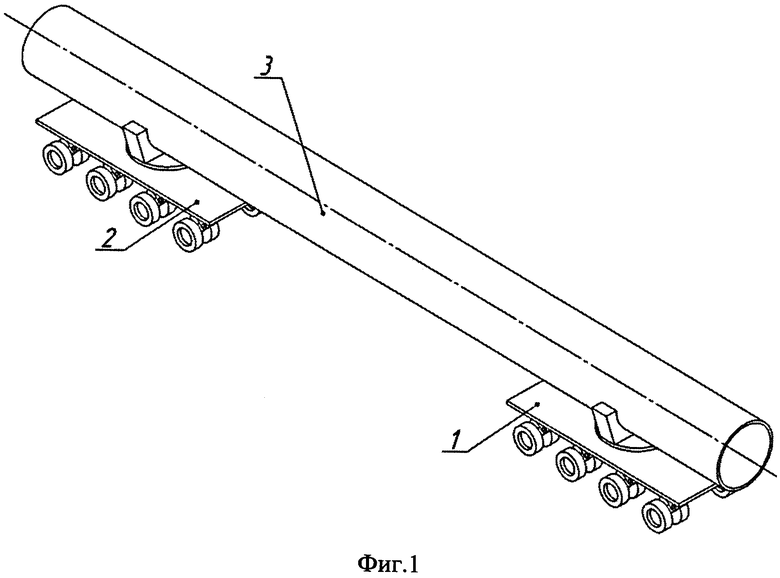
Способ управления движением сочлененного транспортного средства, состоящего из ведущей и ведомой платформ, которые шарнирно соединены между собой посредством грузонесущей рамы или непосредственно перевозимым грузом, колеса каждой из которых выполнены ведущими и снабжены приводами поворота колес, заключающийся в том, что с помощью датчиков, входящих в состав системы управления, постоянно фиксируют параметры движения платформ, в том числе путь и углы складывания между продольной осью каждой из платформ и продольной осью грузонесущей рамы или перевозимого груза, при помощи системы управления осуществляют необходимые расчеты для выработки сигнала управления поворотом колес ведомой платформы для ее следования по траектории ведущей платформы, отличающийся тем, что дополнительно на этапе движения ведущей платформы по криволинейной траектории отслеживают курсовой угол каждой платформы как его приращение относительно общей неподвижной системы координат, начало которой совпадает с соответствующим этапом переходной траектории, контролируют скорость движения ведомой платформы относительно ведущей и рассчитывают параметры поворота ведомой платформы, такие как углы поворота колес, а также момент начала ее движения по криволинейной траектории в зависимости от расстояния между двумя платформами, одновременно с этим производят расчет координат траектории движения геометрического центра ведущей платформы по криволинейной траектории, которые далее, наряду с параметрами, поступающими с датчиков, учитывают при движении ведомой платформы по траектории ведущей, отслеживая значения координат их геометрических центров.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| AU3781885A, 09.08.1985 | |||
| Способ управления транспортным средством | 1976 |
|
SU582130A1 |

