Группа изобретений относится к машиностроению и может быть использована для определения массы и/или положения центра масс преимущественно крупногабаритных изделий.
Известен способ определения массы и положения центра масс изделия, заключающийся в том, что изделие устанавливают на переходник, шарнирно установленный на трех опорах, и уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси наклона, проходящей через шарниры первых двух опор, установку изделия на переходник производят с заведомым смещением от оси наклона, а уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры при различных положениях изделия относительно оси наклона, при достижении состояния неустойчивого равновесия измеряют угол наклона переходника (см. патент РФ 2485466, кл. G01M 1/12, 2011) - наиболее близкий аналог для способа.
В результате анализа известного способа необходимо отметить, что его недостатком является сравнительно малый диапазон измерений. Это связано с тем, что силоизмерительные датчики в составе первых двух опор, с помощью которых производят измерение массы изделия, воспринимают нагрузку не только от изделия, но и от переходника. Обеспечение достаточной жесткости переходника, необходимой для удержания в наклоне крупногабаритных изделий при измерениях, приводит к увеличению массы переходника. Соответственно уменьшается диапазон измеряемых масс изделий, так как, с одной стороны, имеется ограничение по максимальной грузоподъемности датчиков, а с другой стороны - уменьшение массы измеряемых изделий приводит к увеличению относительной погрешности измерений массы.
Известно устройство для определения массы и положения центра масс изделия, содержащее переходник для установки изделия, шарнирно соединенный с тремя опорами, одна из которых имеет подвижную часть, выполненную с возможностью вертикального перемещения посредством привода, датчик наклона переходника относительно оси, проходящей через шарниры первых двух опор, поворотную платформу на переходнике, ось поворота которой является скрещивающейся с осью наклона и отстоящей от нее на заданном расстоянии (см. патент РФ 2485466, кл. G01M 1/12, 2011) - наиболее близкий аналог для устройства.
В результате анализа выполнения известного устройства необходимо отметить, что его недостатком является недостаточная точность измерения массы изделий, обусловленная необходимостью использования для измерения массы встроенных в опоры устройства силоизмерительных датчиков. Ограничения точностных возможностей, присущие любым видам силоизмерительных датчиков, связанные с особенностями их устройства и функционирования, накладывают соответствующие ограничения на точность измерений массы изделия в известном аналоге.
Техническим результатом заявленной группы технических решений является расширение диапазона измерений массы изделия и положения его центра масс и повышение точности измерений.
Указанный технический результат обеспечивается за счет того, что в способе определения массы и положения центра масс изделия, заключающемся в том, что изделие устанавливают на переходник, шарнирно установленный на трех опорах, и уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси наклона, проходящей через шарниры первых двух опор, установку изделия на переходник производят с заведомым смещением от оси наклона, уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры при различных положениях изделия относительно оси наклона, при достижении состояния неустойчивого равновесия измеряют угол наклона переходника, новым является то, что дополнительно измеряют угол наклона переходника с изделием в состоянии неустойчивого равновесия с прикрепленным к переходнику грузом с известными массой и положением центра масс.
В устройстве для определения массы и положения центра масс изделия, содержащем переходник для установки изделия, шарнирно соединенный с тремя опорами, одна из которых имеет подвижную часть, выполненную с возможностью вертикального перемещения посредством привода, датчик наклона переходника относительно оси, проходящей через шарниры первых двух опор, поворотную платформу на переходнике, ось поворота которой является скрещивающейся с осью наклона и отстоящей от нее на заданном расстоянии, новым является то, что переходник снабжен съемным грузом с известной массой и положением центра масс, прикрепляемым к переходнику на известном расстоянии от оси наклона, переходник выполнен сбалансированным относительно оси наклона.
Совокупность отличительных признаков устройства и способа расширяет диапазон измерений и повышает точность измерений массы изделия.
Сущность заявленной группы изобретений иллюстрируется графическими материалами, на которых:
- на фиг. 1 - устройство с изделием и съемным грузом в исходном положении;
- на фиг. 2 - вид на устройство со стороны третьей опоры;
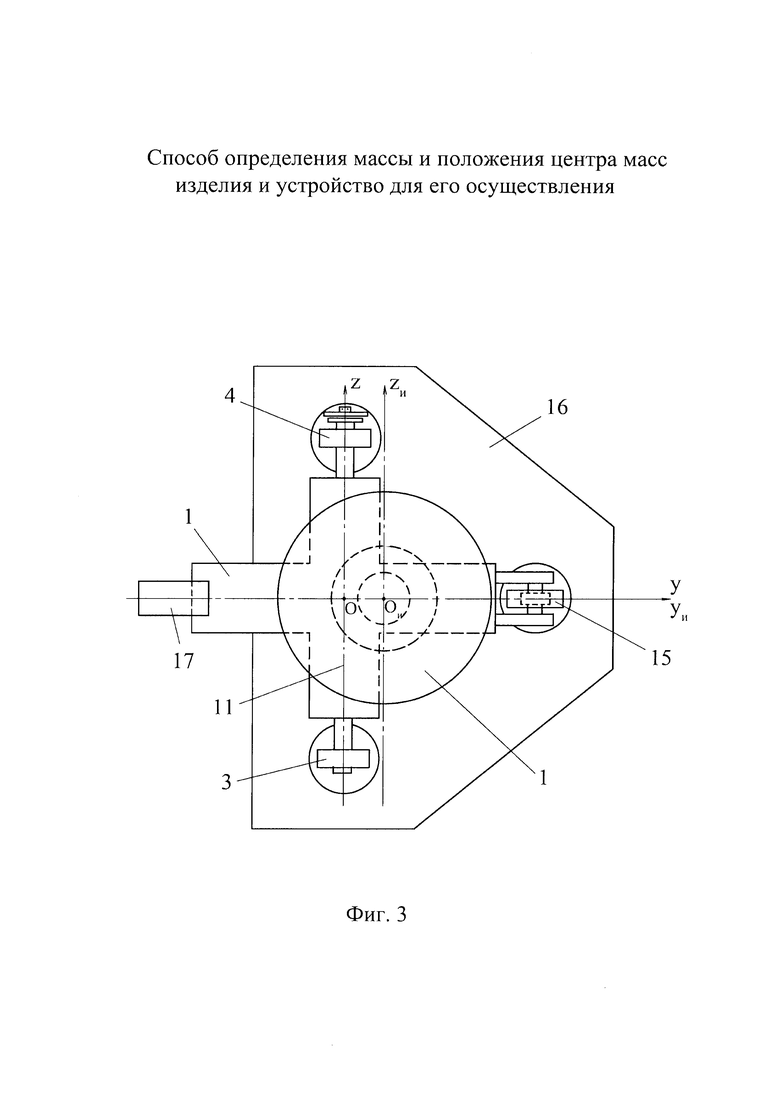
- на фиг. 3 - вид на устройство сверху;
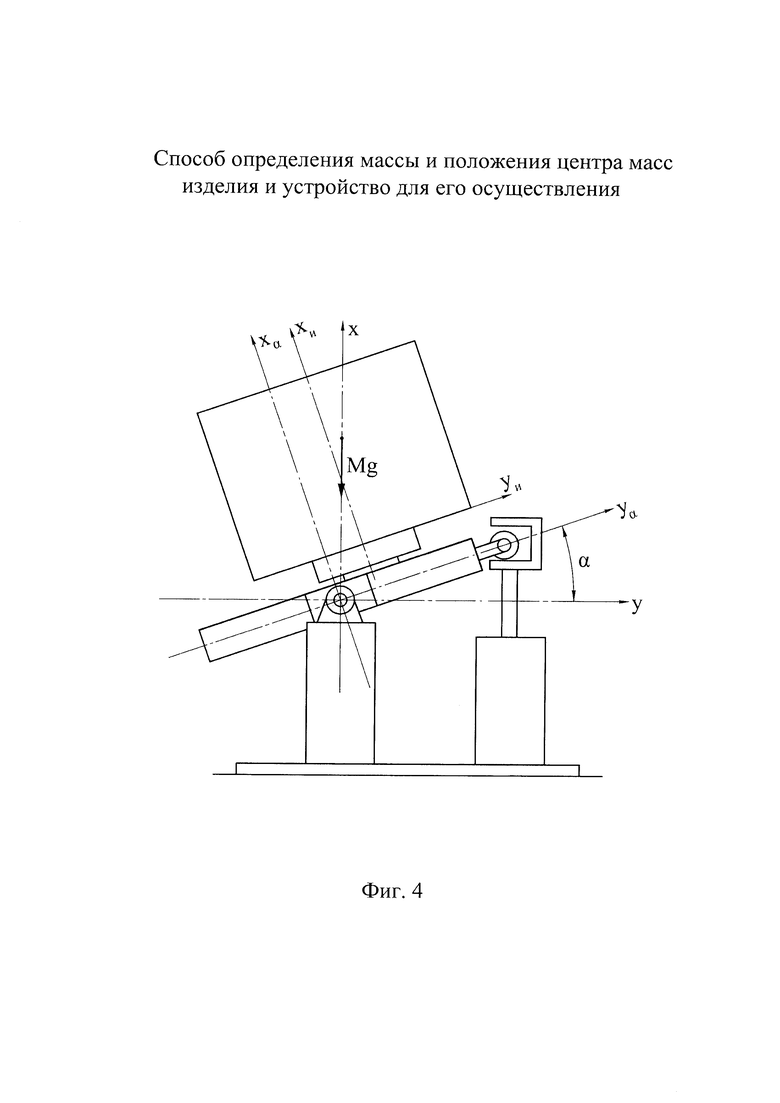
- на фиг. 4 - устройство без съемного груза с изделием в положении неустойчивого равновесия;
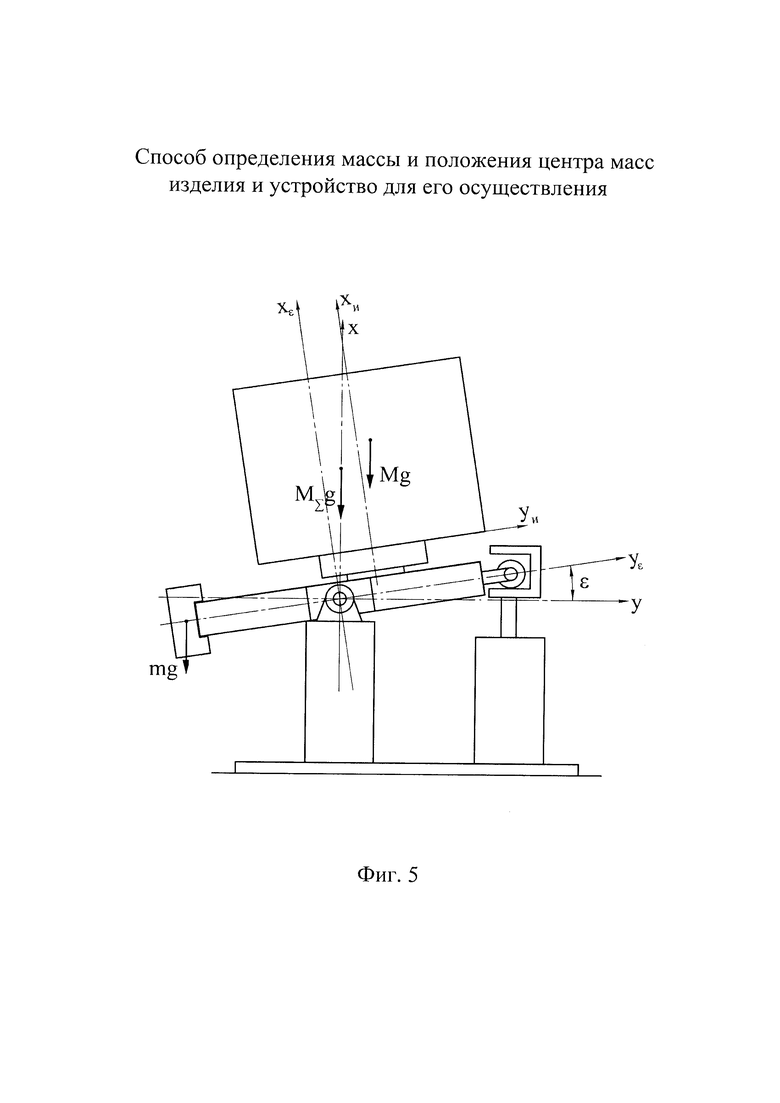
- на фиг. 5 - устройство со съемным грузом и изделием в положении неустойчивого равновесия;
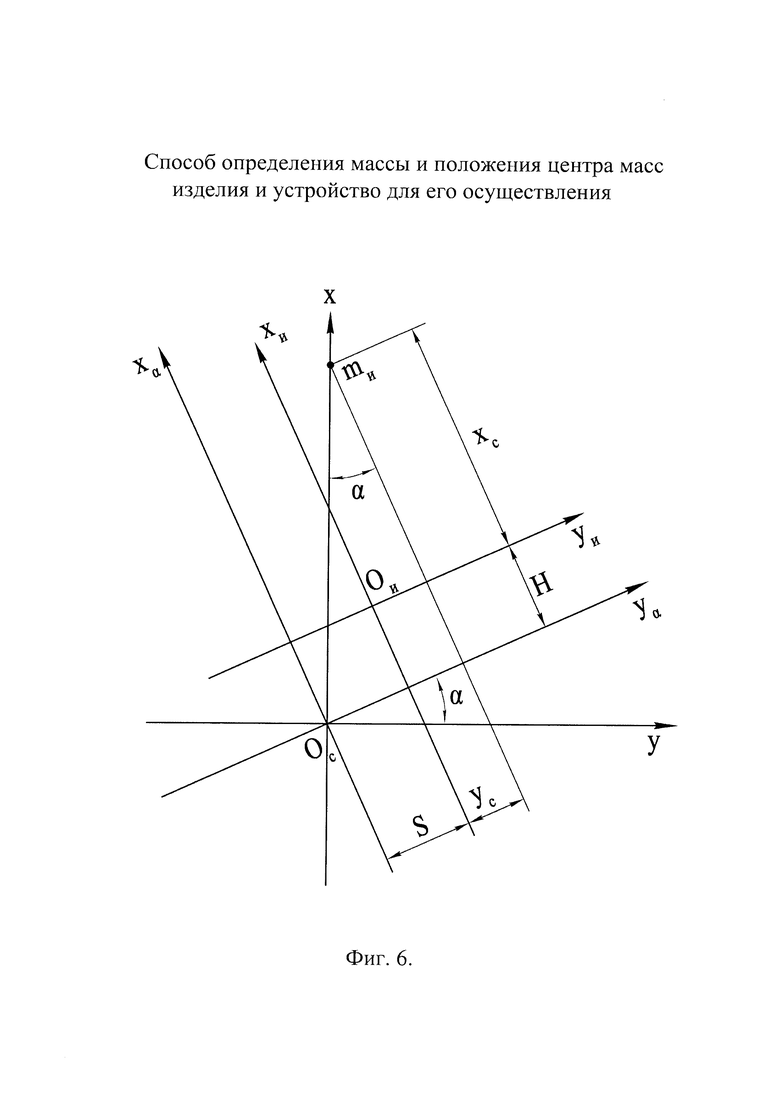
- на фиг. 6 - взаимное расположение систем координат изделия и устройства при уравновешенном состоянии изделия с переходником;
- на фиг. 7 - схема соотношения геометрических параметров в положении равновесия изделия с прикрепленным к переходнику грузом.
Устройство содержит переходник 1 для установки изделия 2, соединенный шарнирами 3, 4 и 5 с тремя опорами 6, 7 и 8, третья опора 8 имеет подвижную часть 9, выполненную с возможностью вертикального перемещения посредством привода в составе опоры 8. Устройство снабжено датчиком 10 наклона переходника 1 относительно оси 11 наклона, проходящей через шарниры 3 и 4 первых двух опор. На переходнике 1 имеется поворотная платформа 12, ось 13 поворота которой является скрещивающейся с осью 11 наклона и отстоящей от нее на заданном расстоянии S. Расстояние S выбирается, с одной стороны, достаточно большим для уменьшения погрешностей измерения углов наклона, с другой стороны, учитываются конструктивные особенности, вносящие ограничения на наклон крупногабаритных изделий. Переходник сбалансирован относительно оси наклона.
Расстояние Н от оси 11 до верхней плоскости платформы 12 выбирается возможно меньшим, учитывая обеспечение достаточной прочности платформы. Ось 13 поворота платформы и ось 11 наклона платформы скрещиваются под прямым углом. Датчик 10 наклона переходника установлен на опоре 7 соосно с осью 11 наклона, подвижная часть 14 датчика 10 крепится к валу переходника 1, опирающемуся посредством шарнира 4 на опору 7. На подвижной части 9 опоры 8 закреплена скоба 15, в которой размещен шарнир 5. Опоры 6, 7 и 8 закреплены на опорной плите основания 16. Съемный груз 17 прикрепляется к переходнику 1 на известном расстоянии D от оси наклона. Ось Oz системы координат Oxyz переходника совпадает с осью 11 наклона, фиг. 3. Переходник сбалансирован относительно Oz, то есть центр масс переходника находится на оси 11 наклона. Системы координат изделия - Оиxиyиzи.
Способ определения массы и положения центра масс изделия посредством описанного выше устройства осуществляют следующим образом.
Изделие 2 устанавливают на переходник 1 без съемного груза 17, см. фиг. 4, уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси 11 наклона, проходящей через шарниры 3 и 4 первых двух опор 6 и 7. Изделие устанавливают на переходник с заведомым смещением S от оси 13 наклона. Уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры 8 при различных положениях изделия относительно оси 11 наклона. При достижении состояния неустойчивого равновесия с помощью датчика 10 измеряют угол наклона переходника. Изделие устанавливают на переходник в четырех положениях, переход из одного положения в другое производят поворотом изделия относительно оси 13. В качестве начала отсчета угла наклона выбирают горизонтальное положение переходника, показанное на фиг. 1, а измерение углов наклона производят в положениях переходника, показанных на фиг. 4 и фиг. 5, при котором происходит отрыв шарнира 5 от скобы 15.
После того, как изделие устанавливают на платформу переходника в первом положении так, как показано на фиг. 1 и измеряют угол α наклона в первом равновесном состоянии, система координат переходника Oxyz займет положение Oxαyαzα. Затем переходник возвращают в начальное положение, поворачивают изделие вокруг оси 13 на платформе переходника на 90° во второе положение. После чего переходник наклоняют до достижения состояния равновесия и измеряют угол β наклона. Затем переходник возвращают в начальное положение, поворачивают изделие вокруг оси 13 на 180° от первоначального положения в третье положение. После чего переходник наклоняют до достижения состояния равновесия и измеряют угол γ наклона. Затем переходник возвращают в начальное положение, поворачивают изделие вокруг оси 13 на 270° от первоначального положения в четвертое положение. После чего переходник наклоняют до достижения состояния равновесия и измеряют угол δ наклона.
Взаимное положение систем координат при измерении угла α показано на фиг. 6. Положения систем координат при измерениях углов β, γ и δ имеют аналогичные геометрические схемы.
Далее решают систему четырех уравнений, описывающих соотношения геометрических параметров в соответствующих положениях равновесия, относительно трех неизвестных координат хс, yс, zc центра масс в системе координат изделия Оихиyиzи:
0°) (S+yс)/(Н+хс)=tg α
90°) (S+zc)/(H+хс)=tg β
180°) (S-yс)/(Н+хс)=tg γ
270°) (S-zc)/(H+хс)=tg δ
Для определения координаты yс совместно решают первое и третье уравнения, для определения координаты zc используются второе и четвертое уравнения. Координата хс определяется как через углы α, γ, так и через углы и β, δ и усредняется. В результате получим выражения для координат центра масс изделия в системе координат изделия:
хс=S[1/(tgα+tgγ)+1/(tgβ+tgδ)-H];
yc=S(tgα-tgγ)/(tgα+tgγ);
zc=S(tgβ-tgδ)/(tgβ+tgδ).
Далее дополнительно измеряют угол ε наклона переходника с изделием в состоянии неустойчивого равновесия с прикрепленным к переходнику грузом с известными массой mг и положением центра масс, как показано на фиг. 5. С целью упрощения расчетов груз закрепляют так, чтобы координаты хг и его центра масс были равны:
хг=0;
yг=D.
Величину D и массу груза mг выбирают из конструктивных соображений. Например, из условия, чтобы углы наклона не выходили за допустимые пределы в положении равновесия.
Схема соотношения геометрических параметров в положении равновесия изделия с прикрепленным к переходнику грузом показана на фиг. 7. Здесь mΣ - суммарный центр масс изделия и съемного груза.
В положении равновесия:
mгDcos ε=mи[(S+yc)-(H+xc)tgε]cos ε,
откуда масса изделия равна:
mи=mгD/[(S+yc)-(H+xc)tg ε].
Таким образом, как следует из полученной формулы, заявленная группа технических решений обеспечивает расширение диапазона измерений массы изделия и повышение точности измерений массы изделия. Расширение диапазона измерений обеспечивается возможностью использования подходящего по массе съемного груза исходя из условия, при котором углы наклона не выходят за допустимые пределы в положении равновесия. Повышение точности измерений массы изделия обеспечивается отсутствием в составе устройства силоизмерительных датчиков с присущими им ограничениями по точности измерений, связанных с особенностями их устройства и функционирования. В качестве образцовой меры массы в предлагаемом техническом решении используют съемный груз, масса которого может быть измерена с заданной точностью, например, путем сравнения с эталонными мерами массы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485466C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И ТЕНЗОРА ИНЕРЦИИ ИЗДЕЛИЯ | 2010 |
|
RU2434213C1 |
| Способ определения статической устройчивости транспортных средств | 2022 |
|
RU2788539C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2476843C1 |
| Стенд для измерения массы, координат центра масс и моментов инерции изделий | 2024 |
|
RU2830397C1 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539810C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ, КООРДИНАТ ЦЕНТРА МАСС И МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЯ | 2012 |
|
RU2506551C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЙ | 2013 |
|
RU2525629C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2458328C1 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2012 |
|
RU2593644C2 |



Изобретения относятся к машиностроению, а именно к способам и устройствам определения координат центра масс преимущественно крупногабаритных изделий. Способ заключается в том, что изделие устанавливают на переходник, шарнирно установленный на трех опорах, и уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси наклона, проходящей через шарниры первых двух опор. Установку изделия на переходник производят с заведомым смещением от оси наклона, уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры при различных положениях изделия относительно оси наклона, при достижении состояния неустойчивого равновесия измеряют угол наклона переходника. Дополнительно измеряют угол наклона переходника с изделием в состоянии неустойчивого равновесия с прикрепленным к переходнику грузом с известными массой и положением центра масс. Устройство для осуществления способа содержит переходник для установки изделия, шарнирно соединенный с тремя опорами, одна из которых имеет подвижную часть, выполненную с возможностью вертикального перемещения посредством привода, датчик наклона переходника относительно оси, проходящей через шарниры первых двух опор, поворотную платформу на переходнике, ось поворота которой является скрещивающейся с осью наклона и отстоящей от нее на заданном расстоянии. Также переходник снабжен съемным грузом с известной массой и положением центра масс, прикрепляемым к переходнику на известном расстоянии от оси наклона. Переходник выполнен сбалансированным относительно оси наклона. Технический результат заключается в расширении диапазона измерений массы и центра масс, повышении точности измерений. 2 н. и 1 з.п. ф-лы, 7 ил.
1. Способ определения массы и положения центра масс изделия, заключающийся в том, что изделие устанавливают на переходник, шарнирно установленный на трех опорах, и уравновешивают изделие с переходником путем приведения в состояние неустойчивого равновесия относительно оси наклона, проходящей через шарниры первых двух опор, причем установку изделия на переходник производят с заведомым смещением от оси наклона, уравновешивание изделия с переходником производят путем наклона переходника с изделием с помощью привода третьей опоры при различных положениях изделия относительно оси наклона, при достижении состояния неустойчивого равновесия измеряют угол наклона переходника, отличающийся тем, что дополнительно измеряют угол наклона переходника с изделием в состоянии неустойчивого равновесия с прикрепленным к переходнику грузом с известными массой и положением центра масс и по результатам измерений определяют массу и положение центра масс изделия.
2. Устройство для определения массы и положения центра масс изделия, содержащее переходник для установки изделия, шарнирно соединенный с тремя опорами, одна из которых имеет подвижную часть, выполненную с возможностью вертикального перемещения посредством привода, датчик наклона переходника относительно оси, проходящей через шарниры первых двух опор, поворотную платформу на переходнике, ось поворота которой является скрещивающейся с осью наклона и отстоящей от нее на заданном расстоянии, отличающееся тем, что переходник снабжен съемным грузом с известной массой и положением центра масс, прикрепляемым к переходнику на известном расстоянии от оси наклона.
3. Устройство по п. 2, отличающееся тем, что переходник выполнен сбалансированным относительно оси наклона.
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2485466C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2458328C1 |
| Устройство для определения координат центра масс изделия | 1989 |
|
SU1781576A1 |
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |

