Изобретение относится к приборостроению.
Известен способ калибровки измерительных систем (патент RU №2262713), в котором путем попеременного ввода в измерительную систему измеряемых и фиксированных эталонных сигналов хэm, автоматического определения в интервалах между эталонными сигналами реальной рабочей преобразовательной характеристики системы по значениям эталонных сигналов путем интерполяции и экстраполяции значений входного измеряемого сигнала многочленом степени n функции наилучшего равномерного приближения и обеспечивающий в соответствии с опорными эталонными значениями и с обобщенной теоремой Чебышева на интервале измерений по крайней мере n+1 или n+2 точки х∈[х0; хn+1], в которых погрешности измерений δM принимают поочередно с учетом неустранимых погрешностей равные максимальные значения ΔδM+(δM±ΔδM) и - (δM±δM) [1].
В данном способе калибровки измерительных систем по значениям эталонных сигналов измеряемой физической величины хэm в узлах интерполяции и определения преобразовательной характеристики f(x) между эталонными значениями, соответствующими узлам интерполяции используется полином наилучшего приближения Чебышева степени n с n+1 константами аi

и заданной максимальной погрешностью метода ее воспроизведения δмм=f(x)-Ln(x), когда все n+2 экстремальные значения погрешностей метода δMM на интервале измерения х∈[a; b] поочередно меняют знак и равны по абсолютной величине [1-3]. Ограничение числа операций при воспроизведении f(х) и устранение избыточной точности результата при максимальных значениях относительной погрешности, например, измерения напряжений в диапазоне δMO∈[50%; 10-11%] и менее достигается путем ограничения числа членов в (1) с наибольшими степенями ряда исходя из оценки верхнего значения погрешности δMM в соответствии с выражением

где f[n+1](x) - производная (n+1)-го порядка.
При этом для определения преобразовательной характеристики используются все члены ряда аiхi и константы аi [2]. Число вычислительных операций для реализации преобразовательной характеристики А будет равно 2n, а с учетом извлечения из памяти n+1 константы 3n+1.
Недостатком данного способа является то, что не учитываются взаимосвязанные действия в процессе измерений над физическими измеряемыми величинами, связанными с физическими процессами дискретизации, квантования аналого-цифрового преобразования входных измеряемых физических величин, аппроксимацией преобразовательных характеристик, порядком и условиями выполнения этих действий в процессе измерений, условиями технической реализации измерительных и вычислительных систем, связанных с ограниченными разрядными сетками представления измеряемых физических величин, преобразовательных характеристик для заданных диапазонов и погрешностей измерений. Таким образом, при заданных форматах представления физических величин, разрядных сетках операндов не будет обеспечена минимизация погрешности результата измерений.
Недостаток способа состоит и в том, что не обеспечены предельные оптимальные соотношения по точностным характеристикам, времени определения преобразовательных характеристик, количеству эталонных значений хэm, выборок констант аi из памяти, быстродействия, программно-аппаратурных затрат для диапазона значений погрешностей δMO∈[50%; 10-11%] и менее с устранением невостребованной, избыточной точности результата, поскольку при f[n+1](x)≠const исключено точное аналитическое определение эталонных значений физической величины или узлов интерполяции Чебышева и нельзя приближенно определять эталонные значения (узлы аппроксимации), если исключать отдельные неэффективные члены аiхi, константы ai, слабо влияющие по сравнению с другими членами, константами полинома на график представления преобразовательной характеристики, погрешность результата измерений. То есть когда при определении преобразовательной характеристики f(x), интерполяции функциональной зависимости главным является принцип максимальной идентичности функции преобразования измерительной системы f(x), заданной аналитически, графически или таблично, и приближающего ее полинома.
Недостатком способа является и увеличение суммарной погрешности измерений, определения преобразовательных характеристик и функциональных зависимостей по сравнению с табличным методом задания функциональной зависимости, поскольку погрешность результата измерений на выходе устройства δp увеличивается за счет составляющих погрешностей метода аппроксимации преобразовательной характеристики δM полиномом, погрешности дискретизации задания эталонов физических операндов аргумента xэm, констант ai, с дискретным квантованным представлением информации из-за ограниченных разрядных сеток вычислительных устройств преобразователей и отбрасыванием разрядов, выходящих за пределы представляемых форматов данных в измерительных системах.
Целью изобретения является повышение точности и скорости измерений.
Поставленная цель достигается тем, что в способе калибровки измерительных систем при заданном значении погрешности результата измерений δp исключаются неэффективные члены ряда аiхi приближающего полинома Ln(х), например, с нулевыми, четными или нечетными степенями и (или) константы аi, в соответствии со стратегией максимальной идентичности функции f(x) с полиномом Ln(x), слабо влияющие на значение погрешности δM по сравнению с другими членами ряда аiхi, с полной или частичной группировкой оставшихся членов полинома по схеме Горнера, выполняется симметрирование, взаимопоглощение слагаемых погрешностей определения преобразовательной характеристики результата δр на выходе системы в виде суммы погрешностей метода δм, дискретного квантованного представления данных δai набора констант аi, измеряемой физической величины х, промежуточных преобразований δnp с ограниченным числом разрядов в форматах представления данных измерительной системы.
По второму варианту определение преобразовательной характеристики системы с предельным соотношением точностных характеристик, скорости измерений и программно-аппаратурных затрат включает в себя этапы, в которых
приближенно определяется воспроизводящий полином с наименьшей степенью n, обеспечивающий заданную максимальную δMM или относительную погрешность δм0 воспроизведения преобразовательной характеристики системы;
в соответствии со стратегией максимальной идентичности графиков определения преобразовательной характеристики или градуировочной характеристики функции f(x) и приближающего полинома Ln(x) исключаются неэффективные, наименее влияющие на значение погрешности δM, члены ряда аiхi, константы аi и (или) ограничивается число значимых разрядов представления констант;
методом многомерной оптимизации производят поиск усеченного полинома наилучшего приближения Ln(x) с m<n+1 оставшимися константами аi, в котором на интервале измерений обеспечивается по крайней мере (m+1) точек, в которых погрешности δM принимают с учетом неустранимых погрешностей ΔδM равные максимальные значения +(δMM±ΔδMM) и -(δMM±δMM);
в соответствии с заданными погрешностями результата δр и полученными значениями погрешностей однократно или многократно уточняют степень полинома n и количество констант m; оставляют степень n без изменения или увеличивают (уменьшают) ее на единицу, уточняют число констант ai и (или) ограниченное число разрядов их представления для получения заданной погрешности результата с исключением невостребованной избыточной точности определения преобразовательной характеристики или функции f(x) полиномом Ln(x) с наиболее максимальным дискретным числом значащих цифр представления результата М и соответствующим ему минимальным числом операций А или (А+m) получения преобразовательной характеристики.
По третьему варианту дополнительно уменьшение погрешности результата δpM измерений осуществляется путем взаимопоглощения составляющих погрешностей округления δa0, δa1,…, δan констант a0, a1, …, аn, погрешностей выполнения промежуточных операций δnp с ограниченным числом разрядов представления их при квантовании и погрешности метода δMM, в котором включаются этапы симметричного округления констант а, в усеченном полиноме наилучшего приближения; последующего варьирования всевозможных комбинаций значений констант в пределах нескольких единиц младшего разряда относительно их симметрично округленных фиксированных квантованных значений с представлением в ограниченном, например, 8, 16, разрядном формате данных и поиском полинома с наименьшим значением погрешности δp во всем диапазоне измерений.
По четвертому варианту для определения преобразовательной характеристики с уменьшением погрешности результата измерений δpM из-за дискретизации задаваемой физической меры измерений, поиск полинома наилучшего приближения производится по отношению к преобразовательной характеристике измерительной системы или функции f(x), сдвинутой по оси х на половину единицы младшего разряда дискретного представления физической меры измерений.
По пятому варианту для определения преобразовательной характеристики, цифровых физических эталонов или градуировочных характеристик типа функции sinх для х∈[0°; 90°] в диапазоне погрешностей δM∈[50%; 10-11%] и ниже используется набор усеченных полиномов наилучшего приближения из ряда с n∈[0; 11] и выше с наименьшими дискретными оптимальными минимальными значениями приращений числа операций А или А+m не более 1…3 и соответствующими им приращениями двоичных значащих цифр результата М 1…6 и более.
По шестому варианту при определении преобразовательной характеристики для уменьшения числа операций с помощью усеченного полинома производится частичная или полная группировка членов ряда аiхi в соответствии со схемой Горнера группировки слагаемых аiхi.
По седьмому варианту определение преобразовательной характеристики или функциональной зависимости заданной таблично осуществляется путем определения значений преобразовательной характеристики или функции между промежуточными дискретными табличными значениями методом кусочно-линейной интерполяции.
По восьмому варианту для повышения быстродействия и снижения программно-аппаратурных затрат в процессе эксплуатации измерительной системы вместо n или n+1 эталонных значений xэm при калибровке используется только m значений, определяемых неравенством m<n+1.
Принцип реализации заявляемого способа кратко может быть показан следующим образом. На вход измерительной системы подаются полезные (измеряемые) и эталонные сигналы. В промежутках между подачей эталонных сигналов путем интерполяции значений измеряемого сигнала в соответствии с опорными эталонными значениями осуществляется автоматическое определение реальной преобразовательной характеристики измерительного канала. Предварительно определение преобразовательной характеристики производится путем градуировки измерительной системы - операции определения, фиксирования и официального утверждения функции преобразования средства измерений. Эталонная градуировочная характеристика может задаваться аналитически, строится в виде таблицы по экспериментальному набору эталонных значений [3, стр.67-71], [4].
Для определения градуировочной характеристики предварительно на измерительную систему подают набор эталонных воздействий измеряемых физических величин xэmi, по этим значениям воспроизводятся цифровые эквиваленты Nэкв, что соответствует табличному представлению. После чего для воспроизведения данной таблицы аналитически с заданной погрешностью метода измерений и устранением избыточной точности производится поиск, расчет полинома наилучшего приближения в соответствии с предлагаемым более эффективным способом определения преобразовательной характеристики.
Принцип реализации заявляемого способа повышения точности определения преобразовательной характеристики, быстродействия измерительной системы приведен на эквивалентном примере улучшения определения физического эталона функции sin (x).
В отличие от классического чебышевского альтернанса, когда в (1) при определении преобразовательной характеристики полным многочленом степени n с (n+1) членами требуется (n+1) набор эталонов хэm или имеется (n+1) узел аппроксимации, где значения эталона или функции совпадают со значениями интерполянта, в предлагаемом способе обеспечено сокращение количества вычислительных операций А, числа обращений к памяти по выборке m констант и числа m эталонных значений измеряемой величины. Принцип состоит в осуществлении ряда операций, чтобы существенное сокращение числа членов ряда аi·хi не приводило к значительному увеличению погрешности измерений по сравнению со значениями погрешности для ряда в (1) с полным набором членов n. При этом, как и для чебышевского альтернанса, обеспечивается при m оставшихся константах аi принцип чередования не менее чем (m+1) раз знака и симметрирования погрешности δMM воспроизводимой полиномом функции f(x)=sinx на интервале х∈[0: π/2] (фиг.1, 2), с наименьшим отклонением ее от нуля (фиг.1, 2). Сокращение в (1) числа вычислительных операций А, при заданной погрешности результата δpM измерений обеспечивается путем оптимального подбора степени полинома, исключения отдельных членов ряда, констант, например, когда задаются a0=0, а1=1, использованием только четных (нечетных) членов ряда с полной или частичной группировкой их по схеме Горнера и т.п.
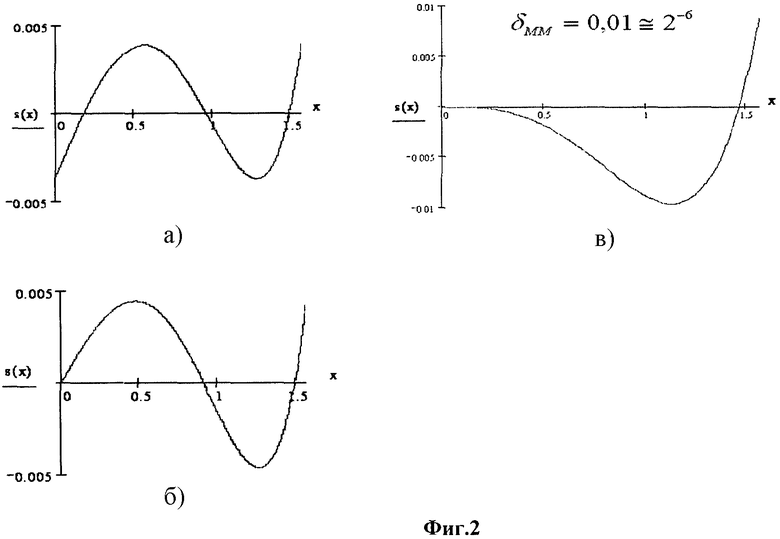
Рассмотрим более конкретно возможности повышения эффективности путем совершенствования полиномиальных методов на вышеуказанных примерах. Для классического полинома Чебышева наилучшего приближения функции sin(x) первой степени уЧ1=а0+a1x имеем (фиг.1)
уЧ1=0.1050+0.636·x (4)
При интервале х∈[0; π/2] значение погрешности δMM=0.105=2-3.2 (фиг.1). Полином получен путем решения задачи вариационного исчисления, когда при поиске минимального значения погрешности не закреплены левое (х1) и правое (х2) эталонные значения (положения узлов интерполяции). В общем случае для реализации алгоритма (4) вычисления полинома из памяти необходимо выбрать две константы а0, а1 и выполнить по операции алгебраического умножения и сложения, то есть всего осуществить 4 операции.
Для сравнения, при разложении функции sin(x) в ряд Тейлора только по одному линейному члену у=х без всяких оптимизаций вычислений максимальное значение погрешности при х=π/2 составит δ1T=|1-1.57|=0.57. Интересно отметить, что меньшее значение погрешности можно получить, если ограничиться на интервале х∈[0; π/2] только значением у0=а0=0.5 с погрешностью δ=|0.5| или уT1C=-0.285+х с погрешностью 0,285 и а1=1 в (1), или использовать полином у=а1·х с а0=0, с обеспечением поиска оптимального коэффициента аi=0.724 на правом подвижном конце подбора эталонного значения физической величины или узла интерполяции хэm (фиг.1б).
Таким образом, при значениях погрешности аппроксимации функции sinx для диапазона δMM∈[0.5; 0.15] применение классического полинома (4) неэффективно, а наиболее целесообразно использовать полином у=0.7246·х со значением погрешности δ1=0.137≅2-3 (фиг.1б), когда только при двух (а фактически одной) вычислительных операциях сразу получается около 3-х значащих двоичных цифр результата.
Компьютерное моделирование с целью поиска полиномов для аппроксимации преобразовательной характеристики с наиболее низким оптимальным произведением δММ(А+m) подтвердило, что разложение в ряд при использовании для нечетной функции sin(x) комбинаций членов с четными степенями неэффективно. Установлено, что для интервала значений погрешностей δ∈[0.15; 0.01] наиболее эффективно применение полинома

Исключение в (1), (5) операции выборки из памяти измерительной системы коэффициентов a0=0, аi=1 и разработка компьютерной программы моделирования с целью получения наименьшего значения для полинома (5) погрешности δMM=0.01≅2-6 обеспечивает при пяти вычислительных операциях по сравнению с применением полинома (4) у41=0.105+0.636·х уменьшение значения погрешности в 0.105/0.01=10.5 раза (фиг.2). На одну вычислительную операцию получено эффективное приращение ΔМ более трех значащих двоичных цифр результата.
Использование в (5) схемы Горнера предполагает дополнительную выборку константы 1 и поэтому общее сокращение числа операций не обеспечивает. В то же время применение полинома у=(0.9855-0.1426·x2)·x со схемой Горнера, с возможностью варьирования и оптимизации константы а1≠1 при увеличении числа операций только на одну по сравнению с (5) позволяет уменьшить значение погрешностей в 0.01/0.0046=2.17 раза. В связи с этим для интервала δ∈[001; 0.05] уже наиболее эффективно применение полинома y=(0.9855-0.1426·x2)·x.
Эффективное сокращение числа операций при незначительном увеличении максимальных значений погрешности для трех полиномов третьей степени: у=a0+a1·х+а3·x3 при a0≠0 и а1≠1; a0=0 и а1≠1; a0=0 и а1=1 проиллюстрировано соответственно на фиг.2 (а, б, в), где для всех трех полиномов третьей степени (полиномы под №3 в таблице) получены единственно возможные наименьшие отклонения от нуля погрешности в 4-х, 3-х и 2-х точках.
В соответствии с рассмотренными принципами, примерами для обеспечения оптимальных соотношений по точностным характеристикам для диапазона δMO∈[50%…10-11%], числу вычислительных операций, обращений к памяти, программно-аппаратным затратам путем компьютерного моделирования получен набор полиномов для приближения преобразовательной характеристики на примере функции sin(x) при х∈[0; π/2] (таблица 1). Эту таблицу следует использовать при оптимизации программно-аппаратной реализации физических эталонов функции sin(x) с заданной погрешностью и быстродействием в системах измерений, обработки информации, например, с 8, 16, 32 разрядами представления формата данных с фиксированной точкой.
Для всех указанных полиномов 3…11 степеней при а0=0, а1≠1 при увеличении числа операций на единицу по сравнению с полиномами, где a0=0, a1=1 погрешность уменьшилась примерно в два раза. Эффективность применения полиномиального метода вычисления функции sin(x) возрастает при увеличении степени полинома. Так, например, отношение значений погрешностей δ5/δ7=1.4·10-4/1.5·10-6=93. При увеличении числа операций с 8-ми до 11 обеспечивается приращение числа значащих двоичных цифр результата ΔМ более чем на 6.

Для сравнения следует отметить, что введение нулевого члена для полинома 5-й степени (таблица!) обеспечило уменьшение значения погрешности по сравнению с полиномом такой же степени с а1≠1 и а0=0 только в 0.7/0.55=1.272 раза. Но в этом случае необходимо ввести две дополнительные операции при вычислении функции.
Кроме погрешности метода δMM в измерительной системе имеют место погрешности из-за физических процессов дискретизации и квантования эталонных значений измеряемых величин, задания констант аi с конечным числом разрядов их представления, выполнения вычислений с урезанными разрядными сетками операндов. Максимальная погрешность результата измерений при определении преобразовательной характеристики с помощью полинома равна
δpM=δ∂+δMM+δai+δnp+δокр.
где δ∂ - погрешность дискретизации, обусловленная дискретным представлением измеряемой физической величины или аргумента с конечным числом разрядов, например, на входе аналого-цифрового преобразователя;
δMM - максимальная погрешность метода аппроксимации преобразовательной характеристики полиномом;
δai - погрешность, обусловленная квантованием констант с конечным числом разрядов их представления в измерительной системе;
δnp - погрешности, обусловленные вычислением значений функции преобразования с учетом конечного числа разрядных сеток операндов при проведении вычислений, например, при округлении избыточных разрядов произведения двух сомножителей;
δокр. - погрешность округления при отбрасывании дополнительных разрядов r, которые используются на этапе промежуточных вычислений.
Погрешности дискретизации измеряемой физической величины или аргумента для детерминированных процессов можно уменьшить примерно в два раза путем симметрирования со сдвигом на полдискрета его значения. То есть график или таблицу значений преобразовательной характеристики (функции преобразования) необходимо реализовать так, чтобы значения функции при ее воспроизведении соответствовали сдвинутым на 0.5 единицы младшего разряда действительным значениям аргумента или дискреты меры измерений.
Погрешность результата δpM с составляющими погрешности метода δMM, задания констант а0…an, при разложении в ряд в двоичной системе счисления с конечным числом членов их физического (материального) преобразования в системе, вес которых кратен степени числа 2 частично уменьшены путем их симметричного округления, взаимной компенсации с погрешностью метода и взаимным окончательным подбором коэффициентов аi с учетом конечных разрядных сеток с проверкой в этом случае допустимых минимальных значений погрешностей результата δpM на выходе измерительной системы. Например, для полинома в таблице 1 под №7 с а0=0 и аi≠1 было получено значение погрешности δM=0,7·10-6, когда коэффициенты аi представлены 8-ю десятичными разрядами. После урезания одного десятичного разряда получено увеличенное значение погрешности δM=1,93·10-6. Последующий дополнительный подбор коэффициентов по предлагаемому способу обеспечил значение составляющих погрешности δpM с учетом погрешностей урезания 4-х констант и метода до δpM=0,698·10-6.
Предложены эффективные способы калибровки измерительных систем определения преобразовательных характеристик, функциональных зависимостей, проверенные при эквивалентном воспроизведении функций вида sin(x) с оптимизацией показателей точности, быстродействия и программно-аппаратных затрат в диапазоне значений погрешности δpMO∈[50%; 10-6%] и ниже за счет исключения нулевого члена (a0=0), константы при линейном члене (а1=1), многомерной взаимной оптимизации коэффициентов а1…an.
Рациональное использование предлагаемых алгоритмов в измерительных системах и других технических приложениях позволяет обеспечить формирование от 1 до 32 и более значащих двоичных разрядов операндов результата измерений, избегая невостребованной избыточной точности результата. Потенциальный выигрыш по точностным характеристикам и быстродействию составляет от десятков до сотен процентов.
Обобщим применение предлагаемого способа при определении преобразовательной характеристики измерительной системы. Предварительно на измерительную систему подают набор эталонных воздействий измеряемых величин xэmi, по этим значениям воспроизводятся цифровые эквиваленты Nэкв, что соответствует табличному представлению. После чего для воспроизведения данной таблицы аналитически с заданной суммарной погрешностью результата измерений и устранением избыточной точности производятся поиск, расчет в соответствии с предлагаемым более эффективным способом определения преобразовательной или градуировочной характеристики.
Технические методы и способы реализации преобразовательных характеристик, поиска полиномов наилучшего приближения для определения функциональных зависимостей, градуировочных характеристик с предлагаемым способом экспериментально проверены и технически реализуется по описанным методикам, тем более что современные аналого-цифровые преобразователи и устройства преобразования и устройства определения преобразовательных характеристик обеспечивают получение результата измерений с предоставлением от 2 до 32 значащих двоичных разрядов, что примерно и соответствует δpMO∈[50%; 10-11%].
Литература
1. Патент РФ 2262713 Способ калибровки измерительных систем / Чекушкин В.В., Булкин В.В. - Опубл. 20.10.05, БИМП 29 (14).
2. Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы. - М.: Лаборатория базовых знаний, 2000. - 624 с.
3. Мурашкина Т.Н., Мещеряков В.А., Бадеева Е.А. и др. Теория измерений: Учебное пособие. М.: Высшая школа, 2007, 151 с.
4. Аверьянов А.М., Чекушкин В.В. Метод поиска полиномов наилучшего приближения для воспроизведения функциональных зависимостей, калибровки датчиков и измерительных систем. №3, 2009, с.2-6.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИОНАЛЬНЫХ ЗАВИСИМОСТЕЙ | 2015 |
|
RU2602989C2 |
| СПОСОБ ЛИНЕАРИЗАЦИИ ГРАДУИРОВОЧНОЙ ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ | 2011 |
|
RU2468379C1 |
| СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2002 |
|
RU2262713C2 |
| Устройство для вычисления полиномов | 1986 |
|
SU1386990A1 |
| Перестраиваемый цифровой фильтр с программируемой структурой | 2016 |
|
RU2631976C2 |
| Способ диагностики недвоичных блоковых кодов | 2018 |
|
RU2693190C1 |
| СПОСОБ СИНТЕЗА ЭЛЕКТРИЧЕСКИХ ФИЛЬТРОВ ПО ЗАДАННОЙ АМПЛИТУДНО-ЧАСТОТНОЙ ХАРАКТЕРИСТИКЕ | 2001 |
|
RU2241306C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРЕАТИНФОСФАТА В ТКАНИ МОЗГА (ВАРИАНТЫ) | 2006 |
|
RU2340903C2 |
| Способ измерения сопротивления изоляции с экстраполяцией тока абсорбции | 2022 |
|
RU2795369C1 |
| СПОСОБ ЛИНЕАРИЗАЦИИ ГРАДУИРОВОЧНОЙ ХАРАКТЕРИСТИКИ ПЬЕЗОРЕЗОНАНСНОГО ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ С ПЕРЕМЕННЫМ МЕЖЭЛЕКТРОДНЫМ ЗАЗОРОМ | 1996 |
|
RU2127496C1 |
Изобретение относится к измерительной технике и может быть использовано для автоматической коррекции погрешностей измерительных устройств. Согласно изобретению в способе калибровки измерительных систем осуществляется взаимная компенсация составляющих погрешностей измерений. В соответствии со стратегией максимальной идентичности графиков экспериментально снятой преобразовательной характеристики, полученной на основе набора эталонных значений, получают аппроксимации, по которым воспроизводится функция наилучшего равномерного приближения, в виде полинома степени n с ограниченным числом членов m<n+1, интерполирующая и экстраполирующая значения эталонных сигналов. Благодаря этому могут быть повышены точность и скорость измерений при снижении программно-аппаратурных затрат. 4 з.п. ф-лы, 2 ил.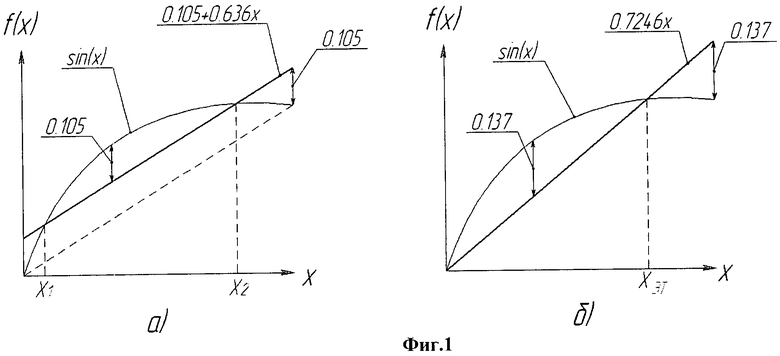
1. Способ калибровки измерительных систем путем попеременного ввода в измерительную систему измеряемых и фиксированных эталонных сигналов хэт, автоматического определения в интервалах между эталонными сигналами реальной преобразовательной характеристики системы по значениям эталонных сигналов путем интерполяции и экстраполяции значений входного измеряемого сигнала многочленом степени n наилучшего равномерного приближения и обеспечивающий в соответствии с опорными эталонными значениями и обобщенной теоремой Чебышева на интервале измерений по крайней мере n+1 или n+2 точки х∈[х0; xn+1], в которых погрешности измерений δM принимают поочередно с учетом неустранимых погрешностей ΔδM равные максимальные значения +(δM±ΔδM) и -(δM±ΔδM), отличающийся тем, что при заданном значении погрешности результата измерений δР исключаются неэффективные члены ряда a
ixi определения преобразовательной характеристики в виде приближающего полинома Ln (х), например, с нулевыми, четными или нечетными степенями и (или) константы а
i в соответствии со стратегией максимальной идентичности преобразовательной характеристики измерительной системы f(x) с полиномом Ln (х), слабо влияющие на значение погрешности δМ по сравнению с другими членами а
ixi, выполняется симметрирование и(или) взаимопоглощение слагаемых погрешностей определения преобразовательной характеристики результата измерений δр на выходе системы в виде суммы погрешностей метода δM, дискретного квантованного представления данных δai, набора констант a
i, измеряемой физической величины х, промежуточных преобразований δпр с ограниченным числом разрядов в форматах преобразования и представления данных измерительной системы;
определение преобразовательной характеристики системы с предельным соотношением точностных характеристик, скорости измерений и программно-аппаратурных затрат, включает в себя этапы, в которых
приближенно определяется воспроизводящий полином с наименьшей степенью n, обеспечивающий заданную максимальную погрешность метода δММ или относительную погрешность δMO определения преобразовательной характеристики системы;
в соответствии со стратегией максимальной идентичности графиков воспроизведения преобразовательной характеристики или градуировочной характеристики и приближающего полинома Ln(x) исключаются неэффективные, наименее влияющие на значение погрешности δM, члены ряда a
ixi, константы а
i и (или) ограничивается число значимых разрядов представления констант;
методом многомерной оптимизации производят поиск усеченного полинома наилучшего приближения Ln(x) с m<n+1 оставшимися константами аi, в котором на интервале измерений обеспечивается по крайней мере (m+1) точек, в которых погрешности δMM принимают с учетом неустранимых погрешностей ΔδM равные максимальные значения +(δMM±ΔδMM) и -(δMM±ΔδMM);
в соответствии с заданными погрешностями результата δР и полученными значениями погрешностей метода δM однократно или многократно проводят их сравнение и уточняют степень полинома n и количество констант m; оставляют степень n без изменения или увеличивают (уменьшают) ее на единицу, уточняют число констант аi и (или) ограниченное число разрядов их представления для получения заданной погрешности результата с исключением невостребованной избыточной точности определения преобразовательной характеристики или функции f(x) полиномом Ln(x) с наиболее максимальным дискретным числом значащих цифр представления результата М и соответствующим ему минимальным числом операций А или (А+m) получения преобразовательной характеристики;
определение преобразовательной характеристики с уменьшением погрешности результата δрM измерений осуществляется путем взаимопоглощения составляющих погрешностей округления δа0, δa1, …, δаn констант а
0, а
1, …, а
n, погрешностей выполнения промежуточных операций δnp с ограниченным числом разрядов представления их при квантовании и погрешности метода δMM, в котором включаются этапы симметричного округления констант аi в усеченном полиноме наилучшего приближения; последующего варьирования всевозможных комбинаций значений констант в пределах нескольких единиц младшего разряда относительно их симметрично округленных фиксированных квантованных значений с представлением в ограниченном, например, 8, 16-разрядном формате данных и поиском полинома с наименьшим значением погрешности δрМ во всем диапазоне измерений.
2. Способ по п.1, отличающийся тем, что для определения преобразовательной характеристики с уменьшением погрешности результата измерений δрM из-за дискретизации задаваемой физической меры измерений поиск полинома наилучшего приближения производится по отношению к преобразовательной характеристике измерительной системы или функции f(x), сдвинутой по оси х на половину единицы младшего разряда дискретного представления физической меры измерений.
3. Способ по п.1, отличающийся тем, что для определения преобразовательной характеристики цифровых физических эталонов или градуировочных характеристик типа функции sin х для х∈[0°; 90°] в диапазоне погрешностей δMO∈[50%; 10-11%] и ниже используется набор усеченных полиномов наилучшего приближения из ряда с n∈[0; 11] и выше с наименьшими дискретными оптимальными минимальными значениями приращений числа операций А или А+m не более 1…3 и соответствующими им приращениями двоичных значащих цифр результата М 1…6 и более.
4. Способ по п.1, отличающийся тем, что определение преобразовательной характеристики или функциональной зависимости, заданной таблично, осуществляется путем определения значений преобразовательной характеристики или функции между промежуточными дискретными табличными значениями методом кусочно-линейной интерполяции.
5. Способ по п.1, отличающийся тем, что в процессе эксплуатации измерительной системы при калибровке используется m эталонных значений хэт, определяемых неравенством m<n+1.
| СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2002 |
|
RU2262713C2 |
| Способ калибровки амплитудных шкал измерительных приборов | 1987 |
|
SU1525644A1 |
| Способ измерения значений погрешностей измерителей напряжения | 1973 |
|
SU636566A1 |
| Способ определения статистической погрешности измерительных устройств | 1981 |
|
SU991342A2 |
| Устройство для автоматизированной поверки измерительных приборов | 1982 |
|
SU1051478A2 |
| US 7451002 В2, 11.11.2008 | |||
| JP 4300253 В2, 22.07.2009. | |||

