Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к области связи и, в частности, относится к методам создания и управления точными источниками частоты в сотовых телефонах или других устройствах связи.
Уровень техники
Современные устройства связи, осуществляющие связь по проводам или беспроводным способом, обычно нуждаются в, по меньшей мере, одном тактовом генераторе, работающем на сравнительно стабильной опорной частоте. При повышении интеграции устройства, например сотовые телефоны, в настоящее время обычно содержат дополнительные функции связи, например приемопередатчики беспроводной локальной сети (W-LAN), радиостанции системы Bluetooth, приемопередатчики глобальной системы позиционирования (GPS), интерфейсы универсальной последовательной шины (USB) и т.д. Кроме того, стандарты сотовой связи усложняются в соответствии с тенденцией одновременного использования нескольких каналов связи, каждый из которых может использовать отличающуюся рабочую частоту.
Каждый блок связи нуждается в, по меньшей мере, одной тактовой частоте для тактовой синхронизации или групповых трактов, или цифровых сигнальных процессоров, или для применения в качестве гетеродинов в радиосхемах. Точные рабочие частоты, необходимые каждому блоку, могут изменяться, и требования к точности также могут изменяться для разных функций. Например, сотовый телефон обычно должен содержать гетеродины, которые обеспечивают точность до приблизительно 0,1 частей на миллион (ч/млн) относительно опорного сигнала на базовой станции, принимающей передачи телефона. Поскольку доплеровский сдвиг, вызываемый движением телефона относительно базовой станции, может вызывать сдвиг кажущейся частоты вплоть до 0,5 ч/млн, то данную точность обеспечивают применением общеизвестных методов автоматической подстройки частоты (AFC). Приемник GPS, с другой стороны, будет работать вполне хорошо с точностью по частоте порядка 0,5 ч/млн или даже 2 или 3 ч/млн, но может требовать, чтобы его генератор опорной частоты был стабильным с точностью до 2 частей на миллиард (ч/млрд) в течение интервала измерений для оптимизации характеристик. Напротив, радиостанция системы Bluetooth может нуждаться в точности опорной частоты только порядка 20 ч/млн.
Для минимизации затрат устройства могут совместно использовать опорный генератор тактового сигнала. Например, в патенте США № 6867734 (Voor et al.) описано устройство связи, объединяющее сотовый приемопередатчик и приемник GPS, в котором совместно используемый опорный генератор тактового сигнала служит для синтеза гетеродинного сигнала для связного приемопередатчика и высокочастотный тактовый сигнал для приемника GPS. В международной публикации № WO 03/098258 A1 и европейской патентной заявке EP 1206039 A2 представлены другие решения для совместного использования генератора тактового сигнала связным приемопередатчиком и приемником GPS. Однако совместное использование опорного генератора тактового сигнала может порождать несколько проблем.
Во-первых, если AFC применяют для подстройки опорной тактовой частоты так, чтобы, например, гетеродин (LO) сотового приемопередатчика отслеживал частоту принятого сигнала базовой станции, то изменения опорной тактовой частоты отражались в других схемах, совместно использующих опорный сигнал. Временная потеря принятого сигнала, например, возможная при проезде по туннелю, может вызывать неожиданные изменения опорной тактовой частоты вследствие реакции контура AFC на потерю сигнала. Упомянутые изменения могут навредить рабочим характеристикам других схем, совместно использующих опорный сигнал. Изменения опорной частоты, обусловленные отслеживанием доплеровских ошибок, будут также проходить по другим схемам, совместно использующим опорный генератор тактового сигнала, и, тем самым, снова вызывать возможные ухудшения рабочих характеристик. Кроме того, корректировки опорной тактовой частоты методом AFC, даже относительно небольшие, могут сорвать работу в случаях применения, которые требуют стабильности тактового сигнала в течение критического интервала.
С учетом вышеизложенного в настоящей заявке предлагаются способы и устройства для генерации из одного опорного тактового сигнала, по меньшей мере, двух тактовых сигналов для отдельных применений в устройстве связи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Принципы, приведенные в настоящей заявке, обеспечивают способы и схемы синтеза, по меньшей мере, двух сигналов, синфазных с сигналом опорной частоты. В нескольких вариантах осуществления способ содержит этап генерации первого и второго выходных сигналов, синфазных с опорным тактовым сигналом, с помощью первой и второй схем цепи фазовой синхронизации. В ответ на обнаруженную погрешность частоты в первом выходном сигнале первый выходной сигнал корректируется подстройкой коэффициента деления частоты в первой схеме цепи фазовой синхронизации. Второй выходной сигнал корректируется отдельно от коррекции первого выходного сигнала подстройкой коэффициента деления частоты во второй схеме цепи фазовой синхронизации с использованием параметра подстройки, вычисленного по обнаруженной погрешности частоты.
В другом примерном способе первый и второй выходные сигналы генерируются, как описано выше, с использованием первой и второй схем цепей фазовой синхронизации. Первый выходной сигнал корректируется подстройкой коэффициента деления частоты в первой схеме цепи фазовой синхронизации и генерацией управляющего сигнала для подстройки частоты опорного тактового сигнала в ответ на обнаруженную погрешность частоты в первом выходном сигнале. Так как второй выходной сигнал получается из общего опорного тактового сигнала, то подстройки опорной тактовой частоты будут также подстраивать частоту второго выходного сигнала. Дополнительные подстройки второго выходного сигнала могут вводиться в некоторых вариантах осуществления подстройкой коэффициента деления частоты во вторых схемах цепи фазовой синхронизации.
Схема синтезатора частот в соответствии с, по меньшей мере, одним вариантом осуществления настоящего изобретения содержит первую и вторую схемы цепи фазовой синхронизации, выполненные с возможностью генерации первого и второго выходных сигналов, соответственно, при этом каждый выходной сигнал синхронизирован по фазе с общим опорным тактовым сигналом. Схема синтезатора частот дополнительно содержит схему частотной коррекции, выполненную с возможностью коррекции первого выходного сигнала подстройкой первого коэффициента деления частоты в первой схеме цепи фазовой синхронизации в ответ на обнаруженную погрешность частоты в первом выходном сигнале. Схема частотной коррекции дополнительно выполнена с возможностью вычисления параметра подстройки на основе обнаруженной погрешности частоты и коррекции второго выходного сигнала подстройкой второго коэффициента деления частоты во второй схеме цепи фазовой синхронизации с использованием параметра подстройки.
В нескольких вариантах осуществления схема частотной коррекции выполнена с возможностью вычисления параметра подстройки на основе смещения таким образом, что частоты первого и второго выходных сигналов корректируются в разных соотношениях. В одном или более вариантах осуществления схема частотной коррекции выполнена с возможностью планирования подстроек, вводимых в любой или каждый из первого или второго коэффициентов деления частоты или в опорный генератор тактового сигнала, чтобы исключить скачки частоты в первом или втором выходных сигналах, или в обоих упомянутых сигналах в течение, по меньшей мере, одного временного интервала, связанного с конкретным применением.
Предлагается также примерное устройство связи, содержащее схему связного приемопередатчика, схему второго приемника, первую и вторую схемы цепи фазовой синхронизации, выполненные с возможностью генерации первого и второго выходных сигналов, соответственно, синфазных с общим опорным тактовым сигналом, и схему частотной коррекции. Первый выходной сигнал используется схемой связного приемопередатчика и второй выходной сигнал используется схемой второго приемника. Схема частотной коррекции выполнена с возможностью коррекции первого выходного сигнала подстройкой первого коэффициента деления частоты в первой схеме цепи фазовой синхронизации и генерацией управляющего сигнала для подстройки частоты опорного тактового сигнала в ответ на погрешность частоты в первом выходном сигнале, обнаруженную схемой связного приемопередатчика. В некоторых вариантах осуществления схема частотной коррекции может быть дополнительно выполнена с возможностью вычисления параметра подстройки на основе обнаруженной погрешности частоты и коррекции опорной тактовой частоты, и коррекции второго выходного сигнала подстройкой второго коэффициента деления частоты во второй схеме цепи фазовой синхронизации с использованием параметра подстройки.
В нескольких вариантах осуществления второй приемник может содержать схему приемника навигационного спутника, например схему приемника GPS, и схема частотной коррекции выполнена с возможностью планирования подстроек, чтобы исключить скачки частоты во время, по меньшей мере, одного измерения спутникового сигнала, выполняемого схемой приемника спутниковой системы позиционирования.
Разумеется, настоящее изобретение не ограничено вышеописанными признаками и преимуществами. Действительно специалисты в данной области техники определят дополнительные признаки и преимущества после прочтения последующего подробного описания и после просмотра прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
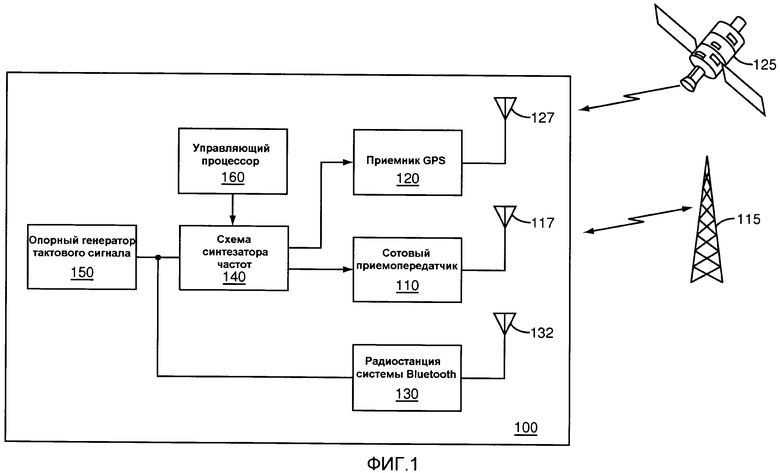
Фиг.1 - блок-схема одного варианта осуществления устройства связи, осуществляющего связь с базовой станцией сотовой связи и приема сигналов навигационного спутника.
Фиг.2 - блок-схема схемы цепи фазовой синхронизации.
Фиг.3 - функциональные блоки схемы синтезатора частот в соответствии с, по меньшей мере, одним вариантом осуществления изобретения.
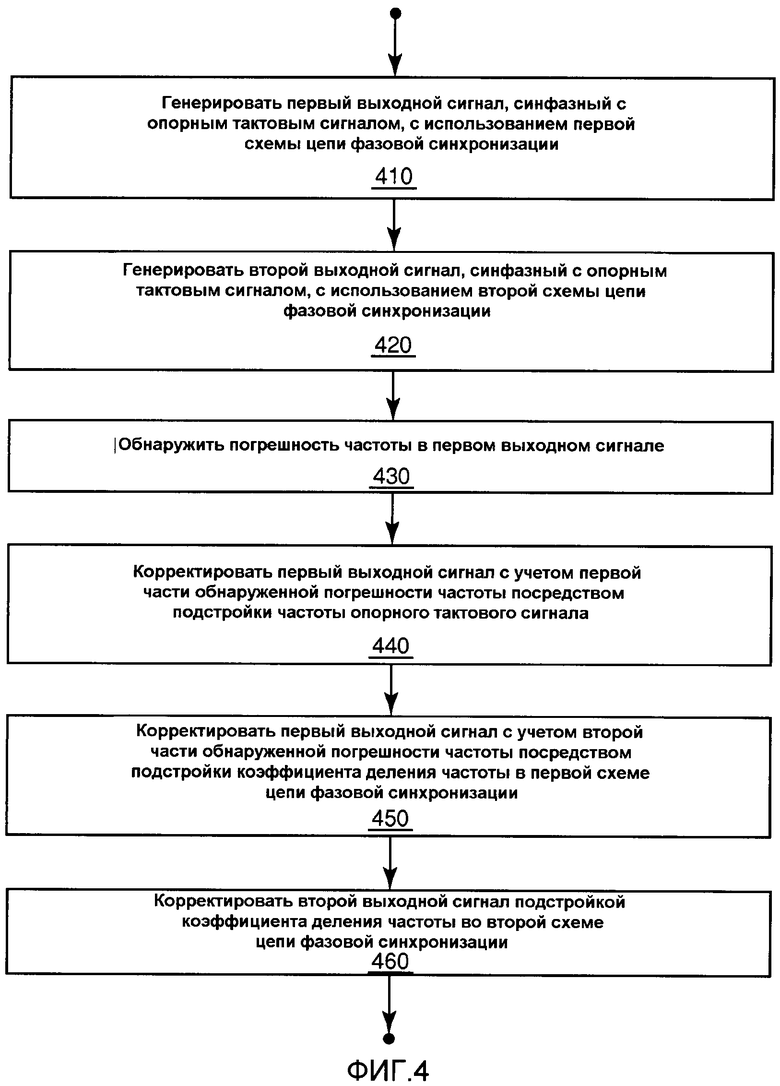
Фиг.4 - блок-схема последовательности операций примерного способа генерации нескольких выходных сигналов, синфазных с общим опорным тактовым сигналом, и коррекции данных сигналов в ответ на обнаруженную погрешность частоты.
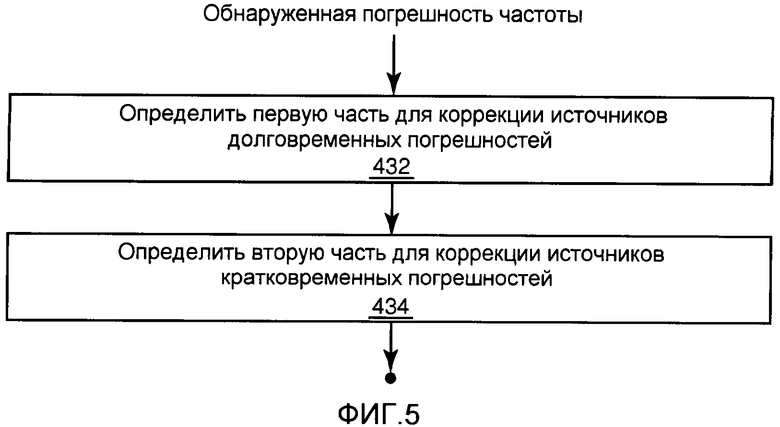
Фиг.5 - блок-схема последовательности операций определения первой и второй частей обнаруженной погрешности частоты в соответствии с некоторыми вариантами осуществления настоящего изобретения.
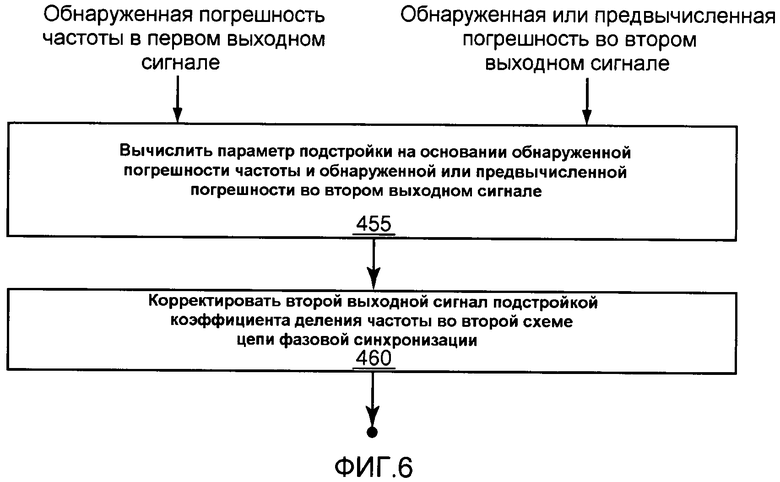
Фиг.6 - блок-схема последовательности операций коррекции второго выходного сигнала на основе обнаруженной погрешности частоты в первом выходном сигнале и предвычисленной погрешности во втором выходном сигнале.
ПОДРОБНОЕ ОПИСАНИЕ
Ниже в описании рассматривается примерный сотовый телефон для иллюстрации различных аспектов настоящего изобретения. Однако специалисты в данной области техники смогут понять, что описанные методы можно применить к любому устройству поддерживающему режим связи, который использует автоматическую подстройку частоты (AFC) некоторого вида в дополнение к, по меньшей мере, одному другому режиму радиопередачи или связи, который может также или не может использовать AFC. Например, способы и схемы, описанные в настоящей заявке, можно использовать в телевизионных приемниках, вещательных радиоприемниках, беспроводных телефонах или подобных устройствах, когда какие-либо из данных устройств интегрированы с другими блоками связи. Соответственно, заявленное изобретение ни в какой степени не ограничено применениями в сотовом телефоне.
На фиг.1 изображен сотовый телефон 100, содержащий сотовый приемопередатчик 110, осуществляющий связь с сотовой базовой станцией 115 через антенну 117 сотового телефона, и приемник GPS 120, принимающий позиционные сигналы от, по меньшей мере, одного навигационного спутника 125 через антенну 127. Сотовый телефон 100 содержит также радиостанцию 130 системы Bluetooth, которая может осуществлять связь с другими устройствами, оснащенными системой Bluetooth, через антенну 132 системы Bluetooth.
Сотовый телефон 100 содержит также схему 140 синтезатора частот, возбуждаемую опорным тактовым сигналом из опорного генератора 150 тактового сигнала, который подает, по меньшей мере, один тактовый сигнал в каждый из сотового приемопередатчика 110 и приемника GPS 120. Каждый из упомянутых подаваемых тактовых сигналов может быть гетеродинным (LO-) сигналом для непосредственного использования в схеме повышающего преобразователя или понижающего преобразователя или может быть промежуточным сигналом, из которого могут быть получены LO- и/или цифровые тактовые сигналы. В показанном варианте осуществления радиостанция 130 системы Bluetooth использует опорный тактовый сигнал непосредственно от опорного генератора 150 тактового сигнала. В других вариантах радиостанция 130 системы Bluetooth может снабжаться другим тактовым сигналом, генерируемым схемой 140 синтезатора частот. Управляющий процессор 160 управляет схемой 140 синтезатора частот, а также приемником GPS 120, сотовым приемопередатчиком 110 и радиостанцией 130 системы Bluetooth.
На фиг.2 показана схема 200 цепи фазовой синхронизации (PLL), которую можно использовать в схеме 140 синтезатора частот для генерации выходного сигнала, синфазного с опорным тактовым сигналом.
Схема PLL 200 содержит генератор 210, дельта-сигма (ДУ) делитель 220 частоты, фазовый детектор 230, генератор 240 подкачки заряда, контурный фильтр 250 и опорный делитель 260. Работа PLL широко известна в технике и будет описана только вкратце в настоящей заявке. Вообще говоря, выходной сигнал, формируемый генератором 210 на частоте f
OUT, подается обратно в ДУ-делитель 220, который вырабатывает сигнал с частотой  . Как более подробно поясняется ниже, ДУ-делитель 220 допускает использование нецелочисленных коэффициентов деления частоты с высоким разрешением. Выходной сигнал ДУ-делителя 220 подается в фазовый детектор 230, в котором упомянутый сигнал сравнивается с опорным сигналом. Опорный сигнал на фиг.2 получается делением опорного тактового сигнала (с частотой f
REF) с использованием опорного делителя 260, который обладает коэффициентом R деления частоты. (Деление опорной частоты является дополнительной возможностью, как очевидно специалистам в данной области техники; если опорная частота не делится, то R=1 в целях данного анализа). Фазовый детектор 230 сравнивает относительные фазы деленного выходного сигнала и деленного опорного сигнала и генерирует сигнал с использованием генератора 240 подкачки заряда, который возбуждает контурный фильтр 250 и генератор 210. Контурный фильтр эффективно интегрирует корректирующие сигналы, генерируемые фазовым детектором 230 и генератором 240 подкачки заряда, для формирования управляющего сигнала, который возбуждает генератор 210 с такой выходной частотой (и фазой), что сравниваемые сигналы на фазовом детекторе 230 имеют постоянный (обычно, нулевой) фазовый сдвиг. Таким образом, сигналы на входе фазового детектора 230 приводятся к одинаковой частоте, чтобы частота выходного сигнала генератора 210 стабилизировалась на
. Как более подробно поясняется ниже, ДУ-делитель 220 допускает использование нецелочисленных коэффициентов деления частоты с высоким разрешением. Выходной сигнал ДУ-делителя 220 подается в фазовый детектор 230, в котором упомянутый сигнал сравнивается с опорным сигналом. Опорный сигнал на фиг.2 получается делением опорного тактового сигнала (с частотой f
REF) с использованием опорного делителя 260, который обладает коэффициентом R деления частоты. (Деление опорной частоты является дополнительной возможностью, как очевидно специалистам в данной области техники; если опорная частота не делится, то R=1 в целях данного анализа). Фазовый детектор 230 сравнивает относительные фазы деленного выходного сигнала и деленного опорного сигнала и генерирует сигнал с использованием генератора 240 подкачки заряда, который возбуждает контурный фильтр 250 и генератор 210. Контурный фильтр эффективно интегрирует корректирующие сигналы, генерируемые фазовым детектором 230 и генератором 240 подкачки заряда, для формирования управляющего сигнала, который возбуждает генератор 210 с такой выходной частотой (и фазой), что сравниваемые сигналы на фазовом детекторе 230 имеют постоянный (обычно, нулевой) фазовый сдвиг. Таким образом, сигналы на входе фазового детектора 230 приводятся к одинаковой частоте, чтобы частота выходного сигнала генератора 210 стабилизировалась на  .
.
Схема PLL 200 является одним примером синтезатора частот с дробным делением частоты. В общем, синтезаторы частот с дробным делением частоты используют то обстоятельство, что быстрые изменения коэффициента N деления цепи обратной связи могут усредняться низкочастотной характеристикой замкнутой системы схемы PLL 200. Например, на протяжении десяти периодов опорного сигнала, если коэффициент деления равен целому числу N
1 в течение семи периодов и целому числу N
2 в течение остальных трех периодов, то средний коэффициент равен  . Специалисты в данной области смогут понять, что эффективный коэффициент деления не ограничен целыми числами. Например, если N
2=N
1+1, то в предыдущем примере эффективный коэффициент деления равен (N
1+0,3). Синтезаторы с дробным коэффициентом деления десятки лет применялись для получения меньших величин шагов подстройки (или, что эквивалентно, для обеспечения возможности использования более высоких опорных частот), но всегда содержали в выходном сигнале паразитные тональные сигналы, которые сложно подавить. Однако в последнее время были разработаны полностью цифровые способы реализации временных последовательностей введения изменений в мгновенное значение коэффициента деления цепи обратной связи, включая применение ДУ-делителя 220, показанного на фиг.2, чтобы минимизировать влияние паразитного выходного сила с обеспечением при этом гибкости коэффициентов деления, которые можно изменять на почти произвольно малые величины шагов.
. Специалисты в данной области смогут понять, что эффективный коэффициент деления не ограничен целыми числами. Например, если N
2=N
1+1, то в предыдущем примере эффективный коэффициент деления равен (N
1+0,3). Синтезаторы с дробным коэффициентом деления десятки лет применялись для получения меньших величин шагов подстройки (или, что эквивалентно, для обеспечения возможности использования более высоких опорных частот), но всегда содержали в выходном сигнале паразитные тональные сигналы, которые сложно подавить. Однако в последнее время были разработаны полностью цифровые способы реализации временных последовательностей введения изменений в мгновенное значение коэффициента деления цепи обратной связи, включая применение ДУ-делителя 220, показанного на фиг.2, чтобы минимизировать влияние паразитного выходного сила с обеспечением при этом гибкости коэффициентов деления, которые можно изменять на почти произвольно малые величины шагов.
Так как правильно разработанный синтезатор с дробным коэффициентом деления допускает очень малые шаги подстройки, то небольшие подстройки или корректировки выходной частоты можно выполнять подстройкой коэффициента N деления частоты. В результате автоматическая подстройка частоты (AFC), которая традиционно выполнялась подстройкой опорной тактовой частоты, может выполняться вместо этого подстройками коэффициента деления частоты в ДУ-делителе 220. В патенте США 6856791, выданном 15 февраля 2005 на имя Klemmer, содержание которого включено в настоящую заявку посредством ссылки, описана схема AFC для мобильного терминала, использующего схему PLL с дробным коэффициентом деления для непосредственного уменьшения погрешностей в синтезированной частоте. Погрешность частоты в синтезированной выходной частоте обнаруживается посредством анализа сигналов, принимаемых из базовой станции, и генерируется управляющий сигнал, чтобы подстраивать дробный коэффициент делителя частоты для компенсации погрешности. В варианте осуществления, описанном Klemmer, погрешность частоты обнаруживается наблюдением за средней скоростью вращения символов в принятой совокупности I (синфазной)/Q (квадратурной) составляющих; специалистам в данной области техники известны различные методы обнаружения и измерения погрешности в источнике частоты относительно сигнала, принятого из внешнего передатчика.
Так как корректировки частоты, вводимые в делителе 220 частоты, не влияют на опорный тактовый сигнал, то данные подстройки также не будут влиять на другие схемы, которые совместно используют частоту опорного тактового сигнала. На фиг.3 показана схема 300 синтезатора частот, содержащая две схемы PLL 200, указанные на фиг.3 как PLL 200' и PLL 200”, возбуждаемые каждая опорным тактовым сигналом от опорного генератора 150 тактового сигнала. Схема 300 синтезатора частот дополнительно содержит схему 310 частотной коррекции, которая выполнена с возможностью коррекции частоты первого выходного сигнала 350 подстройкой делителя 220' частоты в PLL 200' в ответ на обнаруженную погрешность частоты в, по меньшей мере, одном из выходных сигналов. Схема 310 частотной коррекции дополнительно выполнена с возможностью генерации управляющего сигнала 360 для подстройки частоты опорного генератора 150 тактового сигнала. Далее в примерном варианте осуществления на фиг.3 схема частотной коррекции также выполнена с возможностью введения подстройки в делитель 220” частоты в PLL 200".
В то время как корректировки частоты выходного сигнала 350, вводимые подстройкой делителя 220' частоты, не влияют на выходной сигнал 370 (из PLL 200”), подстройки опорного тактового генератора 150 непосредственно влияют на выходной сигнал 370. Таким образом, корректировки частоты первого сигнала, выходного сигнала 350 могут распределяться между подстройками коэффициента деления частоты делителя 220' и подстройками опорного генератора 150 тактового сигнала. Распределение может быть основано на искомой корректировке частоты второго выходного сигнала 370. Например, в предположении, что в выходном сигнале 350 обнаружена погрешность частоты +5 ч/млн (Положительную ошибку можно произвольно определить как означающую, что выходной сигнал 350 имеет более высокую частоту, чем требуется). Схема 310 частотной коррекции может быть выполнена с возможностью распределения полученной коррекции на 3 ч/млн данной схемы на долю подстройки делителя 220' в PLL 200'. Таким образом, управляющий сигнал, настраивающий коэффициент деления частоты делителя 220', подстраивается так, что частота выходного сигнала 350 снижается на 3 ч/млн (или 0,0003%) относительно искомой частоты. Затем схема 310 частотной коррекции может генерировать управляющий сигнал 360 для подстройки опорного генератора 150 тактового сигнала, чтобы устранить остальную часть ошибки. Следует отметить, что в некоторых вариантах осуществления схема 310 частотной коррекции может вычислять управляющий сигнал 360 для подстройки опорного генератора 150 тактового сигнала на основе искомой подстройки. В других вариантах осуществления традиционные методы с обратной связью, основанные на обнаруженной погрешности, могут применяться для генерации аналогового управляющего сигнала 360 для подстройки опорного генератора тактового сигнала, чтобы исключить любую погрешность частоты, не скорректированную подстройкой делителя 220'.
Предыдущие примеры можно дополнительно пояснить дополнительными численными данными. Предполагается, что опорная тактовая частота, f REF, равна 26,00 МГц и искомая выходная частота равна 869,01 МГц. Дополнительно предполагается, что опорный делитель 260 не применяется или в альтернативном варианте, что R=1. Соответственно, номинальный коэффициент N деления должен быть установлен приблизительно равным 33,423462. (На практике, разумеется, коэффициент деления может быть задан в двоичной форме. Кроме того, разрешение может быть в практическом устройстве меньше, чем разрешение, подразумеваемое в данном примере.) Дополнительно предполагается, что, посредством сравнения генерируемого выходного сигнала 350 с принятым сигналом, обнаруживается погрешность частоты 4,0 кГц. Иначе говоря, фактически определяется выходная частота, равная 869,014 МГц, а не искомая частота 869,010 МГц. В относительном исчислении данная погрешность приблизительно равна 4,6 ч/млн. Данная погрешность частоты может содержать погрешность, обусловленную доплеровским сдвигом, а также погрешность, обусловленную температурным дрейфом в опорном генераторе 150 тактового сигнала. Погрешность может быть почти идеально скорректирована подстройкой деления частоты в делителе 220' до значения N 33,423308. Иначе говоря, значение N немного подстраивается вниз на 0,000154, что приводит к погрешности намного ниже 0,1 ч/млн.
Как отмечено ранее, благодаря применению AFC к одному делителю 220', частота выходного сигнала 370, которая также получается из опорного генератора 150 тактового сигнала, не испытывает влияния. Однако если часть обнаруженной погрешности частоты корректируется подстройкой опорного генератора 150 тактового сигнала, то выходной сигнал 370 также подстраивается в таком же отношении. Например, в вышеприведенном примере выявлено, что выходной сигнал 350 содержит исходную погрешность частоты около +4,6 ч/млн. Как может быть известно или получено оценкой из данной погрешности, приблизительно +0,3 ч/млн обусловлены доплеровским сдвигом, тогда как остальные +4,3 ч/млн вызваны погрешностью в опорном генераторе 150 тактового сигнала. Выходной сигнал 350 можно корректировать распределением подстроек между подстройками коэффициента деления частоты делителем 220' и опорным генератором 150 тактового сигнала, как описано выше. В данном случае в предположении, что часть погрешности, обусловленная опорным генератором 150 тактового сигнала, оценена правильно, выходной сигнал 370 будет скорректирован подстройкой опорного генератора 150 тактового сигнала.
Специалистам в данной области техники должно быть понятно, что настройка схемы 310 частотной коррекции для введения независимых подстроек в делитель 220' частоты и опорный генератор 150 тактового сигнала обеспечивает две степени свободы. Таким образом, выходной сигнал 350 и выходной сигнал 370 можно корректировать или подстраивать независимо. Данные подстройки могут быть совершенно произвольными в пределах диапазона и разрешения, налагаемых подробным конструктивным решением делителя 220', схемы управления для генерации управляющего сигнала 360 и частотным планом. Таким образом, подстройки могут распределяться на долю делителя 220' частоты и опорного генератора 150 тактового сигнала на основе искомого смещения, чтобы частоты первого и второго выходных сигналов корректировались в разных соотношениях.
Третью степень свободы можно получить настройкой схемы 310 частотной коррекции, чтобы также вводить подстройку в делитель 220” частоты в PLL 200”. Данная настройка может быть полезна, например, в некоторых ситуациях, в которых опорный генератор 150 тактового сигнала применяется еще одной схемой, например, дополнительным связным приемопередатчиком. Если никакой подстройки опорного генератора 150 тактового сигнала не выполняется, то искомая коррекция выходного сигнала 370, например, для согласования со всей или частью коррекции, введенной в выходной сигнал 350, может быть вычислена непосредственно и введена в делитель 220”. С другой стороны, если подстройка опорного генератора 150 тактового сигнала выполняется, то величина данной подстройки должна учитываться при предвычислении подстройки делителя 220”, которая требуется для достижения искомой подстройки или коррекции выходного сигнала 370. Например, в ранее приведенном примере, в выходном сигнале 350 обнаружена погрешность +4,6 ч/млн, скорректированная подстройкой делителя 220' частоты для учета +0,3 ч/млн в погрешности и подстройкой опорного генератора 150 тактового сигнала для учета остальных +4,3 ч/млн. (Если +4,6 ч/млн соответствует положительной погрешности, как в вышеприведенном примере, то опорная тактовая частота корректируется снижением до компенсации.) Частота выходного сигнала 370 также испытывает влияние подстройки опорного генератора 150 тактового сигнала и, тем самым, снижается в соответствующем отношении. Если требуется отличающаяся подстройка выходного сигнала 370, например, для компенсации независимого источника погрешности частоты, то возможно выполнение дополнительной подстройки делителя 220” частоты. Упомянутый источник может быть измерен или обнаружен, например, сравнением выходного сигнала 370 с принятым сигналом или может быть предвычислен на основе, например, обнаруженной погрешности в выходном сигнале 350 или знания рабочих характеристик опорного генератора 150 тактового сигнала, или на основе прогнозируемого доплеровского сдвига принимаемого сигнала, например, сигнала спутниковой системы позиционирования, со спутника 125. Соответственно, подстройку выходного сигнала 370, вызванную коррекцией опорного генератора 150 тактового сигнала, можно увеличить введением смещения или дополнительной подстройки в делитель 220”, которая приводит к сдвигу частоты в том же направлении. В альтернативном варианте общую подстройку можно уменьшить введением подстройки, сдвигающей частоту в противоположном направлении, или даже полностью обратить, при достаточно большой подстройке коэффициента деления частоты в делителе 220”.
Таким образом, специалисты в данной области техники оценят гибкость и диапазон регулирования, облегчаемого вышеописанной схемой и ее вариантами. В некоторых случаях применения могут требоваться только две контрольных точки, а в других случаях, могут требоваться три. Таким образом, схема 310 частотной коррекции может быть выполнена с возможностью подстройки делителя 220' частоты, а также опорного генератора 150 тактового сигнала в некоторых вариантах осуществления, или выполнена с возможностью подстройки только делителя 220' частоты, а также делителя 220” частоты в других вариантах осуществления. Для применений, требующих трех контрольных точек, схема 310 частотной коррекции может быть выполнена, как показано на фиг.3, чтобы подстраивать делители 220' и 220” частоты, а также опорный генератор 150 тактового сигнала. Специалистам в данной области техники будет очевидно, что возможны также дополнительные варианты, включая применение дополнительных схем PLL 200, предназначенных для дополнительных подстроек.
Специалистам в данной области техники будет также понятно, что несколько функциональных элементов вышеописанной схемы 300 синтезатора частот могут быть реализованы на, по меньшей мере, одном микроконтроллере или микропроцессоре и могут быть реализованы совместно с соответствующими прикладными программными интерфейсами между ними или отдельно от них. По меньшей мере, один из упомянутых элементов может быть реализован на управляющем процессоре 160 или на процессоре, используемом совместно, например, с сотовым приемопередатчиком 110 или приемником GPS 120. В альтернативном варианте упомянутые элементы могут быть реализованы на отдельном аппаратном устройстве. Несколько функциональных блоков, например опорный делитель 260 и ДУ-делитель 220, могут быть реализованы с использованием отдельных интегральных схем или могут быть интегрированы в составе цифровой или комбинированной специализированной интегральной схемы (ASIC). Фазовый детектор 230, генератор 240 подкачки заряда и контурный фильтр 250 могут, аналогичным образом, составлять, по меньшей мере, одну отдельную интегральную схему или могут быть интегрированы на ASIC. В некоторых вариантах осуществления контурный фильтр 250 может использовать традиционные аналоговые компоненты, но в других вариантах осуществления полностью цифровые решения могут заменить цепь 200 фазовой синхронизации. Аналогично, VCO (генератор, управляемый напряжением) 210 может содержать дискретную аналоговую схему или может быть реализован на цифровой или комбинированной ASIC. Опорный генератор 150 тактового сигнала обычно содержит кварцевый генератор, который может быть скомпенсирован или стабилизирован различными способами, известными в технике, но можно применить другие источники опорного тактового сигнала. Специалистам в данной области техники будут очевидны оптимальные соотношения между затратами, рабочими характеристиками и стоимостью эксплуатации, характерные для упомянутых вариантов конструктивных решений.
На фиг.4 представлена блок-схема последовательности операций примерного способа синтеза, по меньшей мере, двух выходных сигналов, синфазных с опорным тактовым сигналом, например таких, которые могут быть реализованы с использованием схемы 300 синтезатора частот, показанной на фиг.3, или одного из ее вариантов. Хотя способ, изображенный на фиг.4, описан ниже на примере компонентов, показанных на фиг.3, специалистам в данной области техники будет очевидно, что в соответствующих обстоятельствах, можно применить альтернативные схемные конфигурации и функционально эквивалентные компоненты.
На этапе 410 первый выходной сигнал 350 генерируется и синхронизируется по фазе с опорным тактовым сигналом с использованием первой схемы PLL 200'. На этапе 420 второй выходной сигнал 370 генерируется и синхронизируется по фазе с тем же опорным тактовым сигналом с использованием второй схемы PLL 200”. Описание работы примерной схемы PLL 200 приведено выше и далее не повторяется.
На этапе 430 обнаруживается погрешность частоты в первом выходном сигнале 350. Как изложено выше, данная погрешность частоты может быть обнаружена сравнением частоты выходного сигнала 350 с сигналом, принятым из удаленного передатчика. В системе беспроводной связи, например передачи базовой станции, обычно формируются с очень стабильным опорным генератором. Передачи мобильной станции должны, как правило, базироваться на генераторе опорной частоты, который работает с точностью до 0,1 ч/млн или около этого. Данные передачи обычно обеспечиваются с использованием, по меньшей мере, одного общеизвестного метода автоматической подстройки частоты (AFC). Один данный метод, как пояснялось выше, содержит измерение средней скорости вращения совокупности I/Q-составляющих, полученной из принятого сигнала. Поскольку принятый сигнал обычно преобразуется с понижением частоты с использованием того же генератора опорной частоты или связанного с тем, который служит генерации передаваемых сигналов, то погрешность, обнаруженную из измерения вращения совокупности I/Q-составляющих, можно использовать для коррекции погрешности частоты в гетеродинном сигнале передачи.
На этапе 440 схема 310 частотной коррекции корректирует, по меньшей мере, первую часть обнаруженной погрешности частоты подстройкой частоты опорного генератора 150 тактового сигнала. Как описано выше, схема 310 частотной коррекции может вычислять и генерировать цифровой управляющий сигнал, например настроечное слово, для подстройки частоты опорного генератора 150 тактового сигнала. В альтернативном варианте обнаруженную погрешность, если данная погрешность в цифровой форме, можно преобразовывать в аналоговый сигнал, используемый для подстройки опорного генератора 150 тактового сигнала посредством аналогового управляющего интерфейса. Данное решение может быть необходимо, например, для управления кварцевым генератором на варакторе, управляемым напряжением (VCXO). Управляющий сигнал 360, выработанный для подстройки опорного генератора 150 тактового сигнала, может объединяться с другими подстройками, вводимыми в опорный генератор 150 тактового сигнала, например температурной компенсацией, или может быть введен отдельно.
Как пояснялось выше, часть обнаруженной погрешности частоты, корректируемую подстройкой опорного генератора 150 тактового сигнала, можно выбирать произвольно. В альтернативном варианте коррекция опорного генератора 150 тактового сигнала может содержать коррекцию остаточной погрешности частоты, после того, как вторая часть обнаруженной погрешности частоты скорректирована с использованием коэффициента деления частоты делителя 220'. Схема 310 частотной коррекции может быть также выполнена с возможностью распределения части коррекции погрешности частоты на долю подстройки опорного генератора тактового сигнала, на основании предвычисленной или измеренной погрешности, относимой на счет источников погрешностей, работающих по тактовому сигналу. Например, схема 310 частотной коррекции может получать температурные данные и быть выполненной с возможностью предвычисления составляющей погрешности частоты, обусловленной температурной. Данная предвычисленная составляющая погрешности может распределяться на долю коррекции опорной тактовой частоты.
В некоторых вариантах осуществления схема 310 частотной коррекции может быть выполнена с возможностью усреднения нескольких измерений погрешности частоты в течение предварительно заданного интервала времени, чтобы определять среднюю погрешность частоты. Данное решение может быть особенно полезным, когда обнаруженная погрешность изменяется в течение нескольких секунд или минут, возможно, вследствие изменений доплеровского сдвига, обусловленного изменениями относительной скорости. Схема 310 частотной коррекции может быть выполнена с возможностью распределения данной средней ошибки на долю опорного генератора 150 тактового сигнала и подстройки опорной тактовой частоты соответствующим образом.
На этапе 450 вторая часть обнаруженной погрешности частоты в первом выходном сигнале 350 корректируется подстройкой коэффициента деления частоты в делителе 220' частоты. Данная вторая часть обнаруженной погрешности частоты может содержать остаток погрешности частоты за вычетом первой части. В альтернативном варианте схема 310 частотной коррекции может быть выполнена с возможностью недостаточной или избыточной коррекции в зависимости от конкретных прикладной задачи и обстоятельств. Кроме того, данную подстройку для коррекции второй части погрешности частоты, фактически, можно вводить первой. Например, схема 310 частотной коррекции может вычислить искомую подстройку, которую следует выполнить посредством делителя 220' частоты, ввести данную подстройку и затем дать возможность схеме AFC с обратной связью устранять остаточную погрешность частоты подстройкой опорной тактовой частоты.
И, наконец, в способе, показанном на фиг.4, схема 310 частотной коррекции корректирует второй выходной сигнал 370 подстройкой коэффициента деления частоты в делителе 220” во второй схеме PLL 200” на этапе 460. Как отмечалось выше, упомянутая коррекция второго выходного сигнала 370 может основываться на измеренной или предвычисленной погрешности во втором выходном сигнале и, обычно, будет учитывать любую подстройку, введенную в опорный генератор 150 тактового сигнала.
Способ, показанный на фиг.4, использует три подстройки (делителя 220', делителя 220” и опорного генератора 150 тактового сигнала) для коррекции двух выходных сигналов 350 и 370. В других вариантах осуществления выходные сигналы 350 и 370 можно регулировать с использованием только двух из данных 3 контрольных точек. Например, подстройки могут распределяться между делителем 220' и опорным генератором 150 тактового сигнала, что обеспечивает независимое регулирование выходных сигналов 350 и 370. Аналогично подстройки можно независимо вводить в делители 220' и 220”.
Гибкость, предоставляемая вышеописанными способами, может быть особенно полезной в таких случаях применения, когда функционирование приемника или приемопередатчика особенно чувствительно к изменениям опорной частоты. Например, приемник GPS обычно выполняет операции корреляции для выделения принятых сигналов с расширенным спектром. Для обеспечения искомой чувствительности упомянутые корреляции могут продолжать в течение нескольких сот миллисекунд. В течение данных операций изменения частоты опорного сигнала может срывать корреляции и, тем самым, делать бесполезными полученные измерения. Таким образом, в некоторых вариантах осуществления настоящего изобретения схема 310 частотной коррекции может быть выполнена с возможностью планирования подстроек, вводимых в любой или каждый из делителя 220' или 220” или опорного генератора 150 тактового сигнала, чтобы исключить скачки частоты (например, резкие изменения частоты) в выходном сигнале в течение критического временного интервала, зависящего от прикладной задачи. Указанное планирование может приводиться в исполнение сигналами, принимаемыми из специализированной схемы, например сигналом, который указывает, что подстройки следует отсрочить. В некоторых вариантах осуществления схема 310 частотной коррекции может снабжаться информацией, задающей некоторые временные интервалы, зависящие от прикладной задачи, на основании которых возможна разработка графика введения подстроек.
В некоторых случаях указанное планирование подстроек может только временно влиять на то, каким образом используется конкретная коррекция. Для примера предлагается ситуация, когда погрешность частоты обнаруживается в выходном сигнале, используемом в сотовом приемопередатчике 110. Если график подстроек запрещает подстройки, которые влияют на второй выходной сигнал, то сигнал сотовой системы можно корректировать непосредственно, подстройкой соответствующего делителя 220 частоты; данная подстройка не будет влиять на второй выходной сигнал. Позднее, когда подстройки, влияющие на второй выходной сигнал, больше не запрещаются, то возможно перераспределение корректировок первого выходного сигнала посредством распределение всей или части коррекции на долю подстройки опорного генератора 150 тактового сигнала.
В некоторых вариантах осуществления относительно большие подстройки опорного генератора 150 тактового сигнала могут быть нежелательны. В данных вариантах осуществления схема 310 частотной коррекции может быть выполнена с возможностью плавного введения подстройки в опорный генератор тактового сигнала посредством последовательного распределения искомой коррекции первого выходного сигнала 350 между делителем 220' частоты и опорным генератором 150 тактового сигнала. Данные последовательные подстройки можно вводить в опорный генератор 150 тактового сигнала и делитель 220' в течение предварительно заданного временного интервала таким образом, чтобы большая доля полной коррекции обнаруженной погрешности частоты постепенно смещалась в подстройки опорной тактовой частоты. В некоторых вариантах осуществления упомянутые подстройки можно вычислять для смещения все возрастающей доли полной коррекции в подстройку опорной тактовой частоты при каждой последовательной подстройке. В других вариантах осуществления временной интервал не требуется задавать предварительно. Наоборот, последовательные подстройки можно вводить с использованием фиксированной величины шага или максимальной величины шага, вводимых последовательно до тех пор, пока искомая доля коррекции погрешности не сместится в подстройку опорной тактовой частоты.
На фиг.5 представлена блок-схема последовательности операций примерного способа распределения подстроек между делителем 220' частоты и опорным генератором 150 тактового сигнала. В некоторых вариантах осуществления данное распределение может сочетаться со способом, показанным на фиг.4, и тогда данные этапы можно вставить между этапами 430 и 440. В любом случае на основании обнаруженной погрешности частоты первая часть погрешности частоты определяется на этапе 432, при этом первая часть соответствует долговременным источникам погрешности. Упомянутые источники могут содержать, например, постоянные ошибки настройки опорного генератора 150 тактового сигнала, медленно изменяющиеся ошибки, обусловленные температурным воздействием на опорный генератор 150 тактового сигнала, или ошибки, вызванные снижением напряжения, подаваемого от почти разрядившегося аккумулятора. На этапе 434 определяется вторая часть обнаруженной погрешности частоты, соответствующая кратковременным источникам погрешности. Кратковременная погрешность может возникать, например, в результате доплеровского сдвига. После того как упомянутые первая и вторая части обнаруженной погрешности частоты определены, они могут быть использованы схемой 310 частотной коррекции для распределения подстроек между, например, делителем 220' и опорным генератором 150 тактового сигнала, как было показано на фиг.4.
На фиг.6 более подробно показана коррекция второго выходного сигнала 370 на основе обнаруженной погрешности частоты в первом выходном сигнале 350 и предвычисленной или обнаруженной погрешности частоты во втором выходном сигнале 370. Если известно, что вся или часть обнаруженной погрешности частоты в первом выходном сигнале 350 обусловлена, например, погрешностью опорной частоты, то можно предвычислить соответствующую погрешность для второго выходного сигнала 370. Однако другие источники также могут вносить вклад в предвычисленную погрешность. В любом случае на этапе 455 схема 310 частотной коррекции вычисляет параметр подстройки на основании обнаруженной погрешности частоты в первом выходном сигнале 350 и обнаруженной или предвычисленной погрешности во втором выходном сигнале 370. Предвычисленная ошибка может содержать, например, прогнозируемый доплеровский сдвиг в позиционном сигнале, получаемом из приемника GPS. Вычисление параметра подстройки учитывает погрешность, обнаруженную в первом выходном сигнале 350, либо непосредственно, либо посредством учета корректировок, выполненных для первого выходного сигнала 350 посредством подстроек, введенных в делитель 220' частоты и/или опорный генератор 150 тактового сигнала. Например, схема 310 частотной коррекции может в некоторых вариантах осуществления корректировать первый выходной сигнал 350 подстройкой только коэффициента деления частоты в делителе 220'. В данном случае схема 310 частотной коррекции может вычислять параметр подстройки для применения при коррекции второго выходного сигнала 370, непосредственно на основе обнаруженной погрешности. В другом варианте осуществления, по меньшей мере, часть обнаруженной погрешности частоты может быть скорректирована в первом выходном сигнале 350 подстройкой опорного генератора 150 тактового сигнала, причем в данном случае распределение погрешности вместе с обнаруженной погрешностью частоты можно применить при вычислении искомой подстройки второго выходного сигнала 370.
Специалистам в данной области техники будет очевидна принимая во внимание предыдущее пояснение применимость способов и схем, описанных в настоящей заявке, в устройстве связи, например многофункциональном устройстве связи, показанном на фиг.1. Устройство 100 связи содержит схему связного приемопередатчика, показанную на фиг.1 в виде схемы 110 сотового приемопередатчика, и схему второго приемника, показанную на фиг.1 в виде приемника GPS 120. Схема 140 синтезатора частот может соответствовать схеме 300 синтезатора частот, показанной на фиг.3, и содержит первую и вторую схемы 200' и 200” цепей фазовой синхронизации, выполненные с возможностью генерации первого и второго выходных сигналов 350 и 370, соответственно, синфазных с общим опорным тактовым сигналом из опорного генератора 150 тактового сигнала. Первый выходной сигнал используется схемой 110 связного приемопередатчика и второй выходной сигнал используется схемой 120 второго приемника.
Схема 140 синтезатора частот может дополнительно содержать схему 310 частотной коррекции. Схема 310 частотной коррекции выполнена с возможностью коррекции первого выходного сигнала подстройкой первого коэффициента деления частоты в первой схеме 200' цепи фазовой синхронизации и генерации управляющего сигнала для подстройки частоты опорного тактового сигнала в ответ на погрешность частоты в первом выходном сигнале, обнаруженную схемой 110 связного приемопередатчика. В некоторых вариантах осуществления схема 310 частотной коррекции может быть дополнительно выполнена с возможностью вычисления параметра подстройки на основе обнаруженной погрешности частоты и подстройки опорной тактовой частоты и с возможностью коррекции второго выходного сигнала подстройкой второго коэффициента деления частоты во второй схеме 200” цепи фазовой синхронизации с использованием параметра подстройки. В некоторых вариантах осуществления схема 310 частотной коррекции может быть выполнена с возможностью планирования подстроек любой или каждой из схем 200' или 200” цепей фазовой синхронизации или опорного генератора 150 тактового сигнала, чтобы исключать скачки частоты во время измерений, по меньшей мере, спутникового сигнала, выполняемых схемой приемника спутниковой системы позиционирования.
Специалистам в данной области техники будет очевидно, что вышеприведенное описание и прилагаемые чертежи представляют неограничивающие примеры способов и устройств, предложенных в настоящей заявке для синтеза нескольких сигналов, синфазных с общим опорным сигналов. Соответственно, настоящее изобретение ограничено только нижеследующей формулой изобретения и ее юридически допустимыми эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕЛИТЕЛЬ ЧАСТОТЫ, СХЕМА АВТОМАТИЧЕСКОЙ ФАЗОВОЙ ПОДСТРОЙКИ ЧАСТОТЫ, ПРИЁМОПЕРЕДАТЧИК, РАДИОСТАНЦИЯ И СПОСОБ ЧАСТОТНОГО РАЗДЕЛЕНИЯ | 2015 |
|
RU2668737C1 |
| СИНТЕЗАТОР ЧАСТОТ С ЧАСТОТНОЙ ИЛИ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2004 |
|
RU2280945C1 |
| СИНТЕЗАТОР С ИЗМЕНЯЕМОЙ ЧАСТОТОЙ, СПОСОБ СИНТЕЗА ЧАСТОТЫ СИГНАЛА В СИНТЕЗАТОРЕ И РАДИОТЕЛЕФОН | 1992 |
|
RU2153223C2 |
| Цифровой синтезатор частоты с частотной модуляцией | 1989 |
|
SU1771068A1 |
| АДАПТИВНЫЙ СИНТЕЗАТОР ЧАСТОТ С КОММУТАЦИЕЙ ЭЛЕМЕНТОВ КОЛЬЦА ФАЗОВОЙ АВТОПОДСТРОЙКИ | 2010 |
|
RU2419201C1 |
| СИНТЕЗАТОР ЧАСТОТЫ С ДЕЛЕНИЕМ НА ДРОБНОЕ ЧИСЛО И КОРРЕКЦИЕЙ ОСТАТОЧНОЙ ПОГРЕШНОСТИ И СПОСОБ СИНТЕЗА ЧАСТОТЫ | 1994 |
|
RU2134930C1 |
| Цифровой синтезатор частот | 1980 |
|
SU1042188A1 |
| Цифровой синтезатор частоты с частотной модуляцией | 1987 |
|
SU1543544A1 |
| Цифровой синтезатор частот | 1983 |
|
SU1117840A1 |
| Синтезатор частот | 1986 |
|
SU1478328A1 |

Изобретение относится к области связи и может использоваться для управления точными источниками частоты в сотовых телефонах или других устройствах связи. Достигаемый технический результат - генерация из одного опорного тактового сигнала, по меньшей мере, двух тактовых сигналов для отдельных применений в устройстве связи. Описаны способы и схемы синтеза, по меньшей мере, двух сигналов, синфазных с общим опорным тактовым сигналом. В одном варианте осуществления способ содержит этапы генерации первого и второго выходных сигналов, синфазных с опорным тактовым сигналом, с помощью первой и второй схем цепей фазовой синхронизации, в ответ на обнаружение погрешности частоты в первом выходном сигнале первый выходной сигнал корректируется подстройкой коэффициента деления частоты в первой схеме цепи фазовой синхронизации, второй выходной сигнал корректируется отдельно от коррекции первого выходного сигнала подстройкой коэффициента деления частоты во второй схеме цепи фазовой синхронизации с помощью параметра подстройки, вычисленного по обнаруженной погрешности частоты. В другом способе второй выходной сигнал выводится из общего опорного тактового сигнала подстройкой опорной тактовой частоты (FREF) также подстраивают частоту второго выходного сигнала. Предложены также схемы реализации способов. 5 н. и 17 з.п. ф-лы, 6 ил.
1. Схема синтезатора частот, содержащая: первую схему цепи фазовой синхронизации, выполненную с возможностью генерации первого выходного сигнала, синфазного с опорным тактовым сигналом; вторую схему цепи фазовой синхронизации, выполненную с возможностью генерации второго выходного сигнала, синфазного с тем же самым опорным тактовым сигналом; и схему частотной коррекции, выполненную с возможностью коррекции первого выходного сигнала посредством подстройки первого коэффициента деления частоты в первой схеме цепи фазовой синхронизации и генерации управляющего сигнала для подстройки частоты опорного тактового сигнала в ответ на обнаруженную погрешность частоты в первом выходном сигнале, при этом схема частотной коррекции выполнена с возможностью генерации управляющего сигнала для коррекции по меньшей мере одного источника относительно долговременной погрешности частоты на обнаруженную погрешность частоты и определения подстройки первого коэффициента деления частоты для коррекции по меньшей мере одного источника относительно кратковременной погрешности частоты на обнаруженную погрешность частоты.
2. Схема синтезатора частот по п.1, в которой схема частотной коррекции выполнена с возможностью определения подстройки первого коэффициента деления частоты на основании доплеровского сдвига, являющегося результатом движения схемы синтезатора частот относительно удаленного передатчика.
3. Схема синтезатора частот по п.1, в которой схема частотной коррекции выполнена с возможностью генерации управляющего сигнала на основании погрешности опорной частоты в опорном тактовом сигнале.
4. Схема синтезатора частот по п.2, в которой схема частотной коррекции выполнена с возможностью генерации управляющего сигнала на основании среднего значения обнаруженной погрешности частоты на интервале усреднения и определения подстройки первого коэффициента деления частоты на основании разности между средним значением и обнаруженной погрешностью частоты.
5. Схема синтезатора частот по п.1, в которой схема частотной коррекции дополнительно выполнена с возможностью вычисления параметра подстройки на основании обнаруженной погрешности частоты и подстройки опорной тактовой частоты и коррекции второго выходного сигнала посредством подстройки второго коэффициента деления частоты во второй схеме цепи фазовой синхронизации с использованием параметра подстройки.
6. Схема синтезатора частот по п.1, в которой схема частотной коррекции выполнена с возможностью планирования подстроек частоты опорного тактового сигнала и первого коэффициента деления частоты, чтобы исключать скачки частоты в первом или втором выходных сигналах или обоих упомянутых сигналах в течение по меньшей мере одного временного интервала, зависящего от прикладной задачи.
7. Схема синтезатора частот по п.1, в которой схема частотной коррекции выполнена с возможностью введения последовательных подстроек в частоту опорного тактового сигнала и первый коэффициент деления частоты, чтобы сдвигать во времени большую долю общей коррекции обнаруженной погрешности частоты к подстройкам частоты опорного тактового сигнала.
8. Схема синтезатора частот, содержащая: первую схему цепи фазовой синхронизации, выполненную с возможностью генерации первого выходного сигнала, синфазного с опорным тактовым сигналом; вторую схему цепи фазовой синхронизации, выполненную с возможностью генерации второго выходного сигнала, синфазного с тем же самым опорным тактовым сигналом; и схему частотной коррекции, выполненную с возможностью: коррекции первого выходного сигнала посредством подстройки первого коэффициента деления частоты в первой схеме цепи фазовой синхронизации в ответ на обнаруженную погрешность частоты в первом выходном сигнале; вычисления параметра подстройки на основании обнаруженной погрешности частоты; и коррекции второго выходного сигнала посредством подстройки второго коэффициента деления частоты во второй схеме цепи фазовой синхронизации с использованием параметра подстройки; при этом схема частотной коррекции выполнена с возможностью вычисления параметра настройки на основании смещения, так что частоты первого и второго выходных сигналов корректируются в разных соотношениях.
9. Схема синтезатора частот по п.8, в которой схема частотной коррекции выполнена с возможностью определения смещения на основании обнаруженной погрешности во втором выходном сигнале.
10. Схема синтезатора частот по п.8, в которой схема частотной коррекции выполнена с возможностью определения смещения на основании прогнозируемой погрешности во втором выходном сигнале.
11. Схема синтезатора частот по п.8, в которой схема частотной коррекции выполнена с возможностью планирования подстроек первого и второго коэффициентов деления частоты, чтобы исключать скачки частоты в первом или втором выходных сигналах или обоих упомянутых сигналах в течение по меньшей мере одного временного интервала, зависящего от прикладной задачи.
12. Способ синтеза по меньшей мере двух выходных сигналов из опорного тактового сигнала, при этом способ содержит следующие этапы: генерируют первый выходной сигнал, синфазный с опорным тактовым сигналом, с использованием первой схемы цепи фазовой синхронизации; генерируют второй выходной сигнал, синфазный с опорным тактовым сигналом, с использованием второй схемы цепи фазовой синхронизации; корректируют первый выходной сигнал посредством подстройки первого коэффициента деления частоты в первой схеме цепи фазовой синхронизации и генерации управляющего сигнала для подстройки частоты опорного тактового сигнала в ответ на обнаруженную погрешность частоты в первом выходном сигнале, при этом первый коэффициент деления частоты подстраивается для коррекции по меньшей мере одного источника относительно кратковременной погрешности частоты на обнаруженную погрешность частоты, а управляющий сигнал генерируется для коррекции по меньшей мере одного источника относительно долговременной погрешности частоты на обнаруженную погрешность частоты.
13. Способ по п.12, в котором подстройка первого коэффициента деления частоты в первой схеме цепи фазовой синхронизации включает в себя подстройку первого коэффициента деления частоты на основании доплеровского сдвига, являющегося результатом движения относительно удаленного передатчика.
14. Способ по п.12, в котором генерация управляющего сигнала включает в себя генерацию управляющего сигнала на основании погрешности опорной частоты в опорном тактовом сигнале.
15. Способ по п.12, в котором генерация управляющего сигнала включает в себя генерацию управляющего сигнала на основании среднего значения обнаруженной погрешности частоты на интервале усреднения, и при этом подстройка первого коэффициента деления частоты в первой схеме цепи фазовой синхронизации включает в себя подстройку первого коэффициента деления частоты на основании разности между средним значением обнаруженной погрешности частоты и обнаруженной погрешностью частоты.
16. Способ по п.12, дополнительно содержащий вычисление параметра настройки на основании обнаруженной погрешности частоты в первом выходном сигнале и подстройки опорной тактовой частоты, и коррекцию второго выходного сигнала посредством подстройки второго коэффициента деления частоты во второй схеме цепи фазовой синхронизации с использованием параметра подстройки.
17. Способ по п.12, дополнительно содержащий планирование подстроек частоты опорного тактового сигнала и первого коэффициента деления частоты, чтобы исключать скачки частоты в первом или втором выходных сигналах или обоих упомянутых сигналах в течение по меньшей мере одного временного интервала, зависящего от прикладной задачи.
18. Способ синтеза по меньшей мере двух выходных сигналов из опорного тактового сигнала, при этом способ содержит следующие этапы: генерируют первый выходной сигнал, синфазный с опорным тактовым сигналом, с использованием первой схемы цепи фазовой синхронизации; генерируют второй выходной сигнал, синфазный с опорным тактовым сигналом, с использованием второй схемы цепи фазовой синхронизации; корректируют первый выходной сигнал посредством подстройки первого коэффициента деления частоты в первой схеме цепи фазовой синхронизации в ответ на обнаруженную погрешность частоты в первом выходном сигнале; вычисляют параметр подстройки на основании обнаруженной погрешности частоты; и корректируют второй выходной сигнал отдельно от коррекции первого выходного сигнала посредством подстройки второго коэффициента деления частоты во второй схеме цепи фазовой синхронизации с использованием параметра подстройки; при этом параметр подстройки вычисляют на основании смещения, так что частоты первого и второго выходных сигналов корректируются в разных отношениях.
19. Способ по п.18, дополнительно содержащий планирование подстроек первого и второго коэффициентов деления частоты, чтобы исключать скачки частоты в первом или втором выходных сигналах или в обоих упомянутых сигналах в течение по меньшей мере одного временного интервала, зависящего от прикладной задачи.
20. Устройство связи, содержащее схему связного приемопередатчика; схему второго приемника; первую схему цепи фазовой синхронизации, выполненную с возможностью генерации первого выходного сигнала, синфазного с опорным тактовым сигналом, для использования связным приемопередатчиком; вторую схему цепи фазовой синхронизации, выполненную с возможностью генерации второго выходного сигнала, синфазного с тем же самым опорным тактовым сигналом, для использования схемой второго приемника; и схему частотной коррекции, выполненную с возможностью коррекции первого выходного сигнала посредством подстройки первого коэффициента деления частоты в первой схеме цепи фазовой синхронизации и генерации управляющего сигнала для подстройки частоты опорного тактового сигнала в ответ на погрешность частоты в первом выходном сигнале, обнаруженную схемой связного приемопередатчика, при этом схема частотной коррекции выполнена с возможностью генерации управляющего сигнала для коррекции по меньшей мере одного источника относительно долговременной погрешности частоты на обнаруженную погрешность частоты и определения подстройки первого коэффициента деления частоты для коррекции по меньшей мере одного источника относительно кратковременной погрешности частоты на обнаруженную погрешность частоты.
21. Устройство связи по п.20, в котором схема частотной коррекции дополнительно выполнена с возможностью вычисления параметра подстройки на основании обнаруженной погрешности частоты и подстройки опорной тактовой частоты и коррекции второго выходного сигнала посредством подстройки второго коэффициента деления частоты во второй схеме цепи фазовой синхронизации с использованием параметра подстройки.
22. Устройство связи по п.20, в котором схема частотной коррекции выполнена с возможностью планирования подстроек частоты опорного тактового сигнала и первого коэффициента деления частоты, чтобы исключать скачки частоты в первом или втором выходных сигналах или обоих упомянутых сигналах в течение по меньшей мере одного временного интервала, зависящего от прикладной задачи.
| СХЕМА И СПОСОБ ФАЗОВОЙ СИНХРОНИЗАЦИИ ДЛЯ СИСТЕМЫ ФАЗОВОЙ АВТОПОДСТРОЙКИ ЧАСТОТЫ | 1994 |
|
RU2127485C1 |
| СИНТЕЗАТОР С ИЗМЕНЯЕМОЙ ЧАСТОТОЙ, СПОСОБ СИНТЕЗА ЧАСТОТЫ СИГНАЛА В СИНТЕЗАТОРЕ И РАДИОТЕЛЕФОН | 1992 |
|
RU2153223C2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US 6867734 B2, 15.03.2005 | |||
| US 5559475 A, 24.09.1996. | |||

