Изобретение относится к области бесплатформенных инерциальных систем ориентации и навигации летательных аппаратов, морских и наземных подвижных объектов, внутритрубных инспектирующих снарядов магистральных трубопроводов и других подвижных объектов.
Известен способ калибровки блока с неортогональной ориентацией осей чувствительности шести кварцевых маятниковых акселерометров (Бранец В.Н., Дибров Д.Н., Рыжков B.C., Калихман Л.Я., Калихман Д.М., Полушкин А.В., Нахов С.Н. Методика аттестации блока измерения линейного ускорения с неортогональной ориентацией осей чувствительности шести кварцевых маятниковых акселерометров и методика аттестации рабочих мест для контроля блока и акселерометров // ХIII Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. Под ред. акад. РАН В.Г.Пешехонова. - СПб.: ГНЦ РФ ЦНИИ "Электроприбор". С.226-232). Метод разработан для блока шести акселерометров с осями чувствительности, ориентированными через 60° по образующим конуса с углом полураствора 54,7356°. Выставляют стенд с прецизионной оптической делительной головкой, например OPTIGON, так чтобы ось вращения головки была строго перпендикулярна вектору силы тяжести. Прибор закрепляют на оси вращения прецизионной оптической головки так, чтобы плоскость, образованная осями чувствительности пары акселерометров, была перпендикулярна оси вращения оптической головки, и разворачивают прибор вокруг оси вращения головки на определенные углы. При этом на одном обороте вокруг оси вращения головки определяют смещения нулей, масштабные коэффициенты и углы наклона осей чувствительности акселерометров к опорной плоскости. Затем закрепляют прибор так, чтобы ось вращения оптической делительной головки была параллельна оси симметрии конуса, образованного осями чувствительности акселерометров, и разворачивают прибор вокруг оси вращения головки на определенные углы. При этом на одном обороте вокруг оси вращения головки определяют значения углов между проекцией оси чувствительности измерительного канала на опорную плоскость и упорной плоскостью. Недостатком данного способа является то, что для всех операций при выполнении калибровки требуется прецизионное оборудование.
Известен способ скалярной калибровки тракта измерения линейных ускорений в составе бесплатформенной инерциальной навигационной системы (Измайлов Е.А., Лепе С.Н., Молчанов А.В., Поликовский Е.Ф. Скалярный способ калибровки и балансировки бесплатформенных инерциальных навигационных систем // Юбилейная XV Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. Под ред. акад. РАН В.Г.Пешехонова. - СПб.: ГНЦ РФ ЦНИИ "Электроприбор". С.145-154., Браславский Д.А., Поликовский Е.Ф., Якубович A.M. Способ калибровки трехосного блока акселерометра, заявка на авторское свидетельство №2422425/23 с приоритетом от 24 ноября 1976). Метод разработан для блока трех акселерометров с осями чувствительности, ориентированными ортогонально. Блок акселерометров устанавливается на платформу испытательного оборудования и разворачивается следующим образом. Все развороты делятся на три группы, в каждой из которых производится вращение вокруг одной из номинальных осей триады. Каждая группа содержит восемь поворотов на 45° из своего исходного положения вокруг соответствующей оси триады. Исходное положение первой группы - оси Х и Z перпендикулярны, а ось Y совпадает с вектором ускорения силы тяжести G. Вращение производится вокруг оси X. Исходное положение второй группы - оси Y и Z перпендикулярны, а ось Х совпадает с вектором ускорения силы тяжести G. Вращение производится вокруг оси Z. Исходное положение третьей группы - оси Х и Y перпендикулярны, а ось Z совпадает с вектором ускорения силы тяжести G. Вращение производится вокруг оси Y. Отличие этого способа от существующих состоит в применении в качестве эталона не вектора, а скаляра, функционально связанного с этим вектором. В качестве такого скаляра было предложено использовать скалярное произведение измеряемого вектора ускорения силы тяжести G на самого себя, то есть (в матричном виде) величины GT·G. Подобная замена позволяет значительно повысить точность калибровки триады акселерометров, снизить требования к погрешностям ориентации триады.
Недостатками данного изобретения является невозможность нахождения углов ориентации триады акселерометров относительно осей блока. Затруднение вызывает калибровка блока, содержащего более трех акселерометров, калибровку приходится проводить потриадно, а затем приводить в соответствие матрицы направляющих косинусов различных триад.
Известен способ калибровки параметров бесплатформенного инерциального измерительного модуля (Патент РФ №2269813, кл. G05D 1/00, G01C 21/12, В64G 1/28, 2006. Авторы: Синев А.И., Чеботаревский Ю.В., Плотников П.К., Никишин В.Б. Способ калибровки параметров бесплатформенного инерциального измерительного модуля). В предлагаемом способе используются двухосный гироскоп и дополнительно введенный однокомпонентный гироскоп, а также блок трех акселерометров, которые устанавливают на корпусе модуля. Далее последовательно устанавливают модуль в шесть фиксированных положений. При этом точность задания ориентации относительно вектора силы тяжести является определяющей точность калибровки. В результате определяют нулевые сигналы и масштабные коэффициенты акселерометров, углы неточной установки измерительных осей акселерометров. Данный способ принимается за наиболее близкий аналог изобретения.
Недостатком данного способа является то, что процедура нахождения нулевых сигналов акселерометров, погрешностей углов установки их измерительных осей, масштабных коэффициентов акселерометров требует применения высокоточного испытательного оборудования, способ предназначен только для калибровки ортогонально расположенных акселерометров, а также в процессе калибровки не находятся коэффициенты, описывающие перекрестные связи акселерометров.
Задачей данного изобретения является упрощение процедуры калибровки акселерометров ИИМ, повышение точности калибровки акселерометров ИИМ.
Техническим результатом изобретения является снижение трудоемкости процедуры калибровки, снижение требований к точности испытательного оборудования, расширение числа коэффициентов, определяемых в процессе калибровки ИИМ, в частности, описывающих перекрестные связи акселерометров для их последующего учета в алгоритмах работы ИИМ, возможность калибровки ИИМ с любым числом и ориентацией измерительных осей акселерометров.
Поставленная задача решается следующим образом.
1. ИИМ закрепляют на платформе поворотного стола. При этом необходимым требованием к поворотному кронштейну является возможность точного съема информации об относительных углах поворотов платформы поворотного кронштейна по углам тангажа ϑ и крена γ. Это достаточно просто реализуется с использованием либо лимбов, либо цифровых датчиков угла (энкодеров). Высоких требований к точности начальной выставки платформы, ортогональности осей поворотов стола не предъявляется. Примером может служить поворотный кронштейн КП-9.
2. Платформу поворотного стола разворачивают во всем диапазоне углов крена γ и тангажа ϑ относительно вектора ускорения свободного падения  с фиксированным шагом, например 15°. В каждом положении фиксируют показания акселерометров
с фиксированным шагом, например 15°. В каждом положении фиксируют показания акселерометров  и углы поворотов ϑ и γ.
и углы поворотов ϑ и γ.
3. Численными методами на основе полученных в п.2 данных проводят идентификацию математической модели каждого акселерометра, например, следующего вида:

где i - номер ММА,  - составляющие вектора линейного ускорения по осям ИИМ,
- составляющие вектора линейного ускорения по осям ИИМ,  ,
,  - нулевой сигнал и показания i-го ММА,
- нулевой сигнал и показания i-го ММА,  - i-я строка матрицы
- i-я строка матрицы  , описывающей относительное расположение измерительных осей, перекрестные связи, масштабные коэффициенты акселерометров. В процессе идентификации проводится минимизация функционала качества (2) при варьировании смещений шкал датчиков углов поворотов платформы ϑ0,γ0 и угловых смещений осей поворотов платформы Δγ1,Δϑ2,Δψ2 (см. рис.1).
, описывающей относительное расположение измерительных осей, перекрестные связи, масштабные коэффициенты акселерометров. В процессе идентификации проводится минимизация функционала качества (2) при варьировании смещений шкал датчиков углов поворотов платформы ϑ0,γ0 и угловых смещений осей поворотов платформы Δγ1,Δϑ2,Δψ2 (см. рис.1).

где i - номер ММА, j - номер съема данных,  - i-я строка матрицы
- i-я строка матрицы  ,
,  - проекция вектора ускорения свободного падения на оси ИИМ.
- проекция вектора ускорения свободного падения на оси ИИМ.

где А' - матрица направляющих косинусов, учитывающая смещения шкал датчиков углов поворотов платформы и угловые смещения осей поворотов платформы,  - вектор ускорения свободного падения.
- вектор ускорения свободного падения.
4. Осуществляют привязку матрицы  к осям ИИМ. Для этого на неподвижном основании последовательно закрепляют ИИМ в два различных положения относительно вектора ускорения свободного падения
к осям ИИМ. Для этого на неподвижном основании последовательно закрепляют ИИМ в два различных положения относительно вектора ускорения свободного падения  , за исключением положений, получающихся путем разворота ИИМ на 180° вокруг любой оси (желательно разворачивать в ортогональные положения). Точно определяют углы ориентации ИИМ относительно вектора ускорения свободного падения
, за исключением положений, получающихся путем разворота ИИМ на 180° вокруг любой оси (желательно разворачивать в ортогональные положения). Точно определяют углы ориентации ИИМ относительно вектора ускорения свободного падения  в обоих случаях закрепления ИИМ, например, с помощью оптического квадранта.
в обоих случаях закрепления ИИМ, например, с помощью оптического квадранта.
5. Определяют матрицу направляющих косинусов  , обеспечивающую привязку матрицы
, обеспечивающую привязку матрицы  к осям ИИМ, например методом векторного согласования:
к осям ИИМ, например методом векторного согласования:

где  - нормированное значение соответствующего вектора
- нормированное значение соответствующего вектора  , "1" и "2" - обозначения первого и второго положений ИИМ.
, "1" и "2" - обозначения первого и второго положений ИИМ.

где ϑj, γj - точные значения заданных углов ориентации ИИМ, А - матрица направляющих косинусов.
6. Учитывают определенные ранее коэффициенты в алгоритмах работы ИИМ:

Изложенный способ калибровки параметров ИИМ позволяет с высокой точностью определить элементы матрицы, описывающей ориентацию измерительных осей, масштабные коэффициенты, перекрестные связи, нулевые сигналы акселерометров. Эти параметры являются основными для ИИМ. Их учет в алгоритмах работы ИИМ позволяет значительно повысить точность ИИМ. Рассматриваемый способ не накладывает ограничений на число и расположение калибруемых акселерометров в составе ИИМ. За счет предъявления точностных требований к измерению ориентации только на завершающем этапе калибровки снижаются требования к испытательному оборудованию, снижается трудоемкость процедуры калибровки. За счет учета большего числа коэффициентов в алгоритмах работы ИИМ повышается его точность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения точности калибровки масштабных коэффициентов и углов неортогональности осей чувствительности блока датчиков ДУС | 2019 |
|
RU2718142C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2010 |
|
RU2447404C2 |
| Способ повышения точности калибровки блока микромеханических датчиков угловой скорости | 2019 |
|
RU2727344C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| Способ определения коэффициентов калибровки интегрированного блока датчиков | 2017 |
|
RU2655053C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ОСНОВНЫХ ХАРАКТЕРИСТИК БЛОКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЕЙ | 2016 |
|
RU2626288C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ОРИЕНТАЦИИ ПРИБОРНОЙ СИСТЕМЫ КООРДИНАТ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА УПРАВЛЯЕМОГО ОБЪЕКТА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2008 |
|
RU2386107C1 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
Изобретение относится к области приборостроения бесплатформенных инерциальных систем ориентации и навигации летательных аппаратов, морских и наземных подвижных объектов, внутритрубных инспектирующих снарядов магистральных трубопроводов и других подвижных объектов. Технический результат - упрощение и повышение точности. Для этого при проведении калибровки инерциальный измерительный модуль (ИИМ) закрепляют на платформе поворотного стола низкой точности. Платформу поворотного стола разворачивают во всем диапазоне углов крена и тангажа относительно вектора ускорения свободного падения  с фиксированным шагом. В каждом положении фиксируют показания акселерометров и углы поворотов. Численными методами проводят идентификацию математической модели каждого акселерометра. В процессе идентификации проводят минимизацию суммарной невязки показаний датчиков при варьировании смещений шкал датчиков углов поворотов платформы и угловых смещений осей поворотов платформы. Затем проводят привязку измерительного базиса акселерометров к осям ИИМ. Рассматриваемый способ не накладывает ограничений на число и расположение калибруемых акселерометров в составе ИИМ. 1 ил.
с фиксированным шагом. В каждом положении фиксируют показания акселерометров и углы поворотов. Численными методами проводят идентификацию математической модели каждого акселерометра. В процессе идентификации проводят минимизацию суммарной невязки показаний датчиков при варьировании смещений шкал датчиков углов поворотов платформы и угловых смещений осей поворотов платформы. Затем проводят привязку измерительного базиса акселерометров к осям ИИМ. Рассматриваемый способ не накладывает ограничений на число и расположение калибруемых акселерометров в составе ИИМ. 1 ил.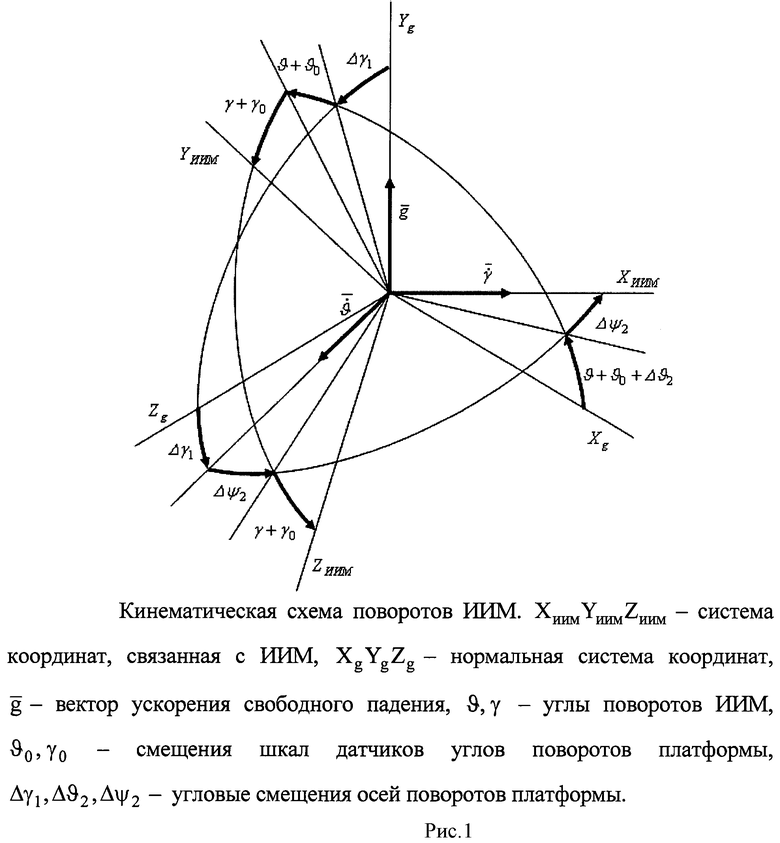
Способ калибровки инерциального измерительного модуля (ИИМ) по каналу датчиков линейного ускорения, отличающийся тем, что предварительная калибровка проводится путем задания различных ориентации ИИМ относительно вектора ускорения свободного падения на грубом поворотном столе, при этом определяют нулевые сигналы и матрицу, описывающую относительное расположение измерительных осей, перекрестные связи, масштабные коэффициенты акселерометров, затем проводят привязку матрицы, описывающей относительное расположение измерительных осей, перекрестные связи, масштабные коэффициенты акселерометров к осям ИИМ, для чего точно определяют ориентацию ИИМ в двух различных положениях относительно вектора ускорения свободного падения  , за исключением положений, получающихся путем разворота ИИМ на 180° вокруг любой оси, при этом рассматриваемый способ не накладывает ограничений на число и расположение калибруемых акселерометров в составе ИИМ, затем учитывают определенные ранее коэффициенты в алгоритмах работы ИИМ.
, за исключением положений, получающихся путем разворота ИИМ на 180° вокруг любой оси, при этом рассматриваемый способ не накладывает ограничений на число и расположение калибруемых акселерометров в составе ИИМ, затем учитывают определенные ранее коэффициенты в алгоритмах работы ИИМ.
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| БИНДЕР Я.И., ПАДЕРИНА Т.В., АНУЧИН О.Н | |||
| Калибровка датчиков угловой скорости с механическим носителем вектора кинетического момента в составе бесплатформенных инерциальных измерительных модулей | |||
| Г | |||
| и Н | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| US 3883812 A, 13.05.1975 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |

