Настоящее описание относится к системам на основе датчиков для диагностических систем ультразвуковой визуализации. Более конкретно, настоящее описание направлено на устройства/системы ультразвуковых датчиков и соответствующих способов, которые включают в себя и/или обеспечивают физическое перемещение двумерной фазированной решетки элементов преобразователя для улучшения диагностической визуализации.
Диагностические системы ультразвуковой визуализации позволяют медицинским специалистам обследовать внутренние ткани и органы пациентов без инвазивных эксплоративных хирургических вмешательств. Диагностические системы ультразвуковой визуализации дают эксплуатационные преимущества перед другими технологиями, в которых используется ионизирующее излучение, такими как рентгеновская томография. Кроме того, диагностические системы ультразвуковой визуализации обычно являются менее сложными, а потому обычно менее затратными по сравнению с традиционными системами визуализации, такими как системы магниторезонансной визуализации и системы компьютерной томографии.
Таким образом, диагностические системы ультразвуковой визуализации дают существенные преимущества во множестве клинических ситуаций, например, при контролировании развития плода. Ультразвуковая визуализация плода может быть осуществлена путем размещения ультразвукового датчика на поверхности живота беременной женщины и получения диагностических данных. Согласно альтернативному варианту ультразвуковая визуализация плода может быть выполнена трансвагинально путем вагинального введения ультразвукового датчика беременной женщине и получения диагностических данных.
Диагностическая визуализация плода в первый триместр беременности является надежным инструментом для выявления возможных аномалий плода. Например, она может быть эффективна для выявления потенциальных аномалий на раннем гестационном цикле для улучшения планирования мероприятий по медицинскому обслуживанию в оставшийся период беременности и/или для помощи в принятии решения на ранней стадии в отношении исхода беременности в долгосрочном плане. Большое многообразие потенциальных аномалий ставит серьезные задачи перед врачом-клиницистом, который должен поставить диагноз в отношении плода. Визуализация анатомии плода в значительных объемах должна выполняться с высоким разрешением, чтобы можно было провести такую диагностику плода. Например, ультразвуковая визуализация для диагностики аномалий сердца плода требует как высокого пространственного разрешения, так и высокого разрешения по времени в пределах относительно малого поля обзора, в то время как поле обзора, необходимое для трансвагинального исследования плода, т.е. полного анатомического строения плода, существенно больше (примерно 140480 градусов).
С середины 1990-х годов были достигнуты значительные успехи в ранней диагностике аномалий плода с использованием трансвагинальных ультразвуковых датчиков, в которых применяются высокие частоты и одномерные решетки элементов преобразователя. Позднее было осуществлено механическое перемещение трансвагинальных ультразвуковых датчиков, использующих решетки с размерностью 1 и так называемой «1,5», для обеспечения трехмерных изображений.
Однако современные диагностические системы ультразвуковой визуализации с механическим перемещением имеют множество ограничений. Например, невозможно выполнить трехмерную визуализацию сердца плода в реальном времени, не прибегая к технологиям пространственно-временной корреляции изображений, которые не вполне полноценны. Кроме того, современные технологии имеют ограниченные возможности по получению цветных допплеровских изображений при сборе изображений сердца плода. В дополнение к этому, современные датчики обладают низким пространственным разрешением в вертикальной плоскости механически перемещаемой одномерной решетки, которая отчасти рассматривается в качестве так называемой решетки с размерностью «1,5» (в которой в вертикальном измерении имеется множество элементов преобразователя - более одного, но существенно меньше, чем в продольном измерении). Кроме того, анатомические особенности матери обычно ограничивают доступ датчика, что снижает возможности сбора необходимых диагностических данных (дополнительные ограничения могут быть связаны с положением плода в матке).
Устройства, системы и способы настоящего описания направлены на решение указанных проблем и/или решают их. В действительности, в настоящем описании сущности изобретения обеспечиваются предпочтительные устройства, системы и способы, которые способствуют механическому перемещению двумерных матричных решеток преобразователей для эффективного сбора данных в клинических условиях. Раскрытые устройства, системы и способы имеют многочисленные клинические применения, в том числе, например, для выполнения визуализации плода при трансвагинальном исследовании.
В настоящем описании обеспечиваются предпочтительные устройства, системы и способы для получения трехмерных диагностических изображений. Согласно примерам вариантов осуществления обеспечивается ультразвуковой датчик в сборе, который включает в себя удлиненный корпус, выполненный с возможностью приспособления к анатомическим ограничениям, блок чувствительных элементов, установленный в корпусе, включающий в себя двумерную фазированную решетку элементов преобразователя, а также механизм управления шарнирным поворотом, который перемещает двумерную фазированную решетку элементов преобразователя относительно удлиненного корпуса. Блок чувствительных элементов предпочтительно выполнен с возможностью физического перемещения in situ для обеспечения желаемого с клинической точки зрения поля обзора.
Удлиненный корпус ультразвукового датчика в сборе, в общем, включает в себя участок наконечника, участок основания, а также промежуточный участок, расположенный между участком наконечника и участком основания. Блок чувствительных элементов, в общем, размещен в пределах участка наконечника удлиненного корпуса (или в нем). Кроме того, раскрытый механизм управления шарнирным поворотом, в общем, расположен на участке основания удлиненного корпуса или установлен, полностью или частично, на нем.
Согласно настоящему описанию врач-клиницист имеет возможность взаимодействовать с механизмом управления шарнирным поворотом или манипулировать им. В примерах вариантов осуществления настоящего описания при приведении в действие механизма управления шарнирным поворотом врачом-клиницистом гибкий промежуточный участок, относящийся к удлиненному корпусу (или определяемый им), позволяет участку наконечника перемещаться относительно участка основания, что обеспечивает оптимальную ориентацию решетки датчика относительно продольной оси удлиненного корпуса в направлении целевой области. Механизм управления шарнирным поворотом управляет шарнирным поворотом двумерной фазированной решетки элементов преобразователя относительно упомянутого удлиненного корпуса в направлении, по существу перпендикулярном продольной оси упомянутого удлиненного корпуса.
Описанный блок чувствительных элементов, в общем, включает в себя матричную решетку или двумерную фазированную решетку элементов преобразователя. Двумерная фазированная решетка элементов преобразователя соединена с механизмом перемещения или установлена на механизме перемещения, выполненном с возможностью поворота решетки элементов преобразователя вокруг или относительно оси, заставляя тем самым элементы преобразователя перемещаться с охватом заданного поля обзора. Звуковые волны испускаются элементами преобразователя и отражаются (по меньшей мере, частично) тканью или иными анатомическими структурами в целевой области. Отраженные волны принимаются блоком чувствительных элементов, который формирует соответствующие электрические сигналы, передаваемые в блок обработки данных, где они обрабатываются для формирования трехмерного изображения, например, на устройстве отображения. На устройстве отображения также может отображаться вид толстого среза с использованием данных, собранных в вертикальном измерении. Таким образом, в предпочтительных вариантах осуществления настоящего описания приведение в действие механизма управления шарнирным поворотом и манипулирование им эффективно позволяют перемещать двумерную фазированную решетку элементов преобразователя относительно продольной оси удлиненного корпуса в направлении целевой области, повышая тем самым качество отображенного изображения.
Имеются существенные преимущества, реализуемые в примерах вариантов осуществления настоящего описания, по сравнению с традиционными системами ультразвуковых датчиков, например трансвагинальными датчиками. К примеру, возможность эффективного использования перемещаемой матричной решетки, в пределах допуска согласно настоящему описанию, позволяет получать скорости сбора данных, достаточные для выполняемой в реальном времени трехмерной объемной визуализации желаемых анатомических структур, например, целиком сердца плода. Конкретнее, перемещение с механической подачей двумерной решетки по настоящему описанию обеспечивает врачу-клиницисту широкое поле обзора для визуализации всего плода, в то время как двумерная решетка, не будучи перемещаемой двигательным механизмом, обеспечивает высокую скорость сбора ультразвуковых изображений в пределах малого поля обзора, что оптимально пригодно для визуализации сердца плода, органа с высокой частотой сокращений (обычно 170 ударов в минуту). Настоящее описание обеспечивает предпочтительный шарнирный поворот наконечника, чтобы позволить осуществить визуализацию соответствующего анатомического строения в полном объеме.
Следует отметить, что трехмерные данные изображений, собранные с помощью раскрытых матричных решеток датчиков, могут быть пригодны для вспомогательных технологий обработки данных. Например, такие трехмерные данные могут быть дополнены цветной допплеровской информацией, чтобы показать кровоток в сосудах сердца плода. Однако, как известно на данном уровне техники, обработку допплеровских сигналов можно выполнить только с акустическими данными, которые специально получены для этой цели, что требует проведения множества циклов передачи/приема в одном направлении.
Хотя конкретные варианты осуществления ультразвуковых датчиков в сборе, выполненные в соответствии с настоящим описанием, могут быть использованы с получением желаемых результатов для трансвагинальной визуализации плода, следует признать, что этим настоящее описание не ограничивается. Как ясно среднему специалисту, ультразвуковые датчики в сборе, выполненные в соответствии с идеей настоящего описания, могут применяться для различных типов диагностической визуализации, в том числе при визуализации простаты, диагностической визуализации при лапароскопических вмешательствах и в других клинических приложениях.
Следует понимать, что как предшествующее общее описание, так и последующее подробное описание служат примерами и имеют целью предоставить дополнительные объяснения раскрытых устройств, систем и способов. Прилагаемые чертежи, которые входят в данное описание и составляют его часть, включены для иллюстрации и обеспечения дополнительного понимания раскрытых устройств, систем и способов. Дополнительные предпочтительные признаки, функции и преимущества раскрытых устройств, систем и способов станут понятными из последующего описания, в особенности, в сочетании с прилагаемыми чертежами.
В помощь специалистам для создания и использования раскрытых датчиков в сборе и сопутствующих способов сделаны ссылки на прилагаемые чертежи, где:
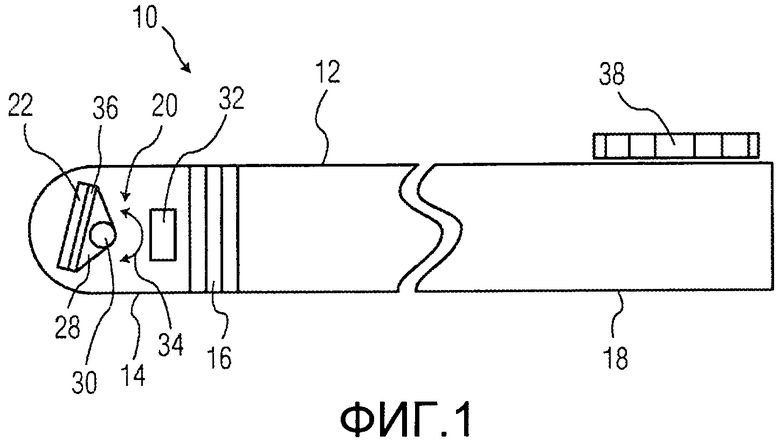
на Фигуре 1 схематично представлен пример ультразвукового датчика в сборе, выполненного в соответствии с настоящим описанием;
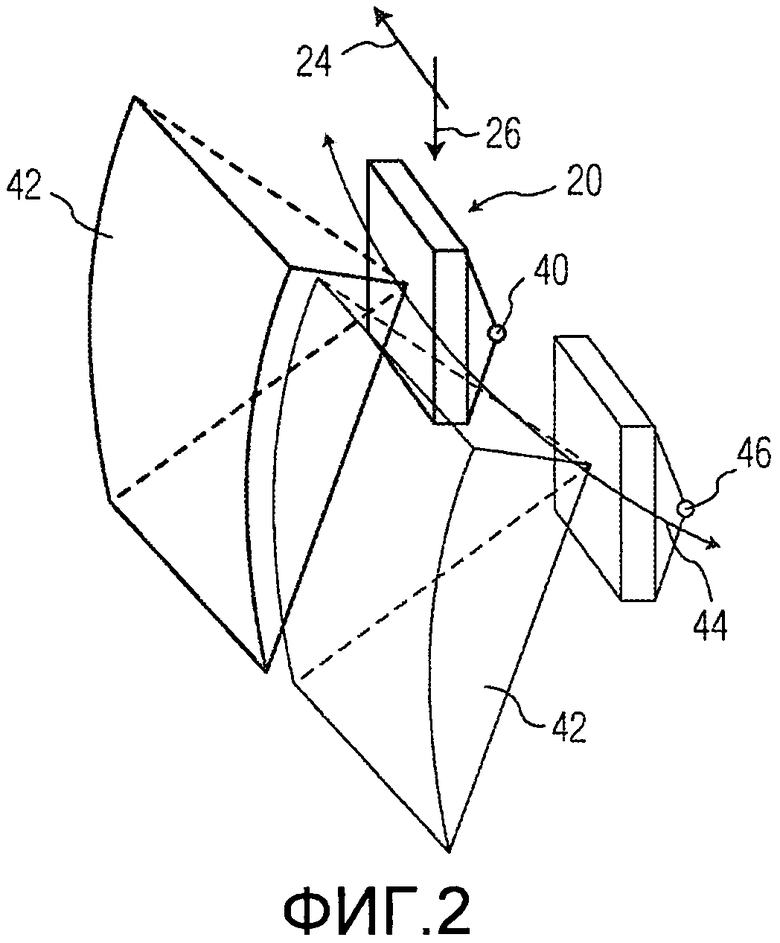
на Фигуре 2 показан шарнирный поворот матричной решетки на примере ультразвукового датчика в сборе, представленного на Фигуре 1; и
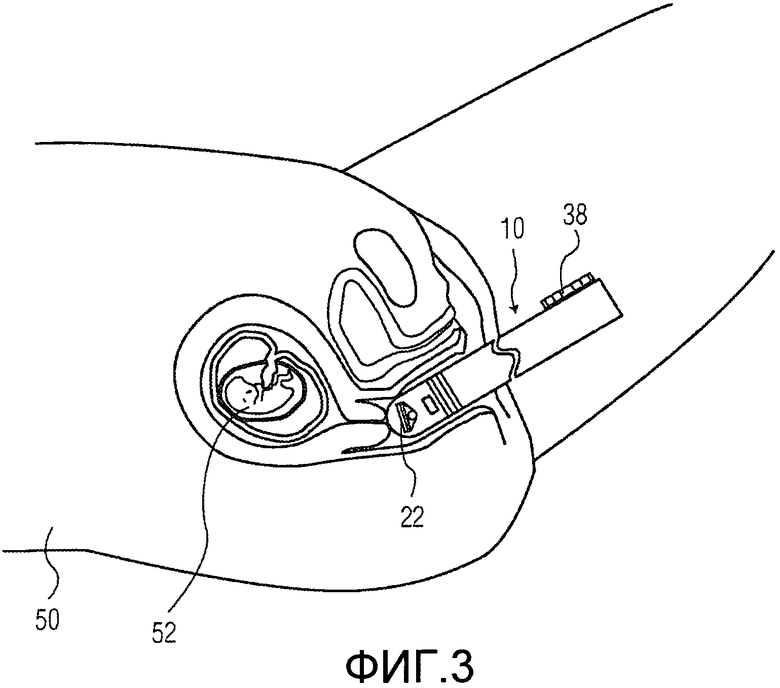
на Фигуре 3 показан пример ультразвукового датчика в сборе, представленного на Фигуре 1, расположенного для трансвагинальной визуализации плода.
Согласно примерам вариантов осуществления в настоящем описании обеспечивается ультразвуковой датчик в сборе для анатомической визуализации, например трансвагинальной визуализации плода, который включает в себя физически перемещаемую двумерную решетку элементов преобразователя, выполненную с возможностью шарнирного поворота для размещения с целью улучшения диагностической визуализации плода. При осуществлении визуализации плода представленным ультразвуковым датчиком в сборе двумерная решетка элементов преобразователя имеет возможность шарнирно поворачиваться во влагалище пациентки. Могут быть разработаны альтернативные клинические пути реализации согласно настоящему описанию, где шарнирный поворот двумерной решетки элементов преобразователя помогает улучшить сбор данных визуализации.
Обратимся к Фигуре 1, на которой типовой ультразвуковой датчик в сборе обозначен в целом позицией 10. Ультразвуковой датчик 10 в сборе включает в себя удлиненный корпус 12, выполненный с возможностью приспособления к соответствующим анатомическим ограничениям, например анатомическим ограничениям тела матери, в плане визуализации ее плода. Удлиненный корпус 12 включает в себя участок 14 наконечника, промежуточный участок 16, а также участок 18 основания.
Участок 14 наконечника размещает в себе и/или несет на себе блок 20 датчика, который включает в себя матричную решетку элементов 22 преобразователя. Матричная решетка является в общем плоской или по существу плоской с геометрической точки зрения, хотя могут применяться и другие геометрические формы без отхода от сущности и объема изобретения. Матричная решетка элементов преобразователя в настоящем описании также упоминается как двумерная фазированная решетка элементов 22 преобразователя. Отдельные элементы преобразователя (не показаны) продолжаются как в горизонтальном измерении, обозначенном стрелкой 24 на Фигуре 2, так и в вертикальном измерении, перпендикулярном горизонтальному измерению и обозначенном стрелкой 26 на Фигуре 2. Могут использоваться различные конструкции элементов преобразователя согласно настоящему описанию. Например, отдельные элементы преобразователя могут быть пьезоэлектрическими элементами, расположенными так, как раскрыто в патенте США №6419633. Конструкция и/или выбор соответствующих элементов преобразователя для включения в состав раскрытой матричной решетки целиком определяются опытом средних специалистов на основе, в частности, соответствующих рабочих, конструкционных и/или клинических параметров.
Двумерная фазированная решетка элементов 22 преобразователя обычно крепится к держателю 28 преобразователя или установлена на нем. Держатель 28 преобразователя шарнирно закреплен на оси 30 перемещения, перпендикулярной продольной оси, определяемой удлиненным корпусом. Обеспечивается механизм 32 перемещения, который включает в себя шаговый двигатель (не показан), используемый для физического перемещения двумерной фазированной решетки элементов 22 преобразователя путем поворота держателя 28 преобразователя вокруг оси 30 перемещения, как показано стрелкой 34. Держатель 28 преобразователя приводится в движение шаговым двигателем, который может соединяться с держателем 28 преобразователя через соответствующий соединительный механизм (соединительные механизмы), например механизм зубчатой передачи (не показан), ременный привод (не показан) или их сочетание.
Под контролем врача-клинициста механизм 32 перемещения заставляет двумерную фазированную решетку элементов 22 преобразователя «качаться» из стороны в сторону, охватывая поле обзора, составляющее примерно 140 градусов. Таким образом, в примере осуществления настоящего описания внешний модуль управления (не показан) выполнен с возможностью отправки/передачи сигналов управления на шаговый двигатель, например, с использованием беспроводной среды передачи или по проводам управления (не показаны), заставляя тем самым двумерную фазированную решетку элементов 22 преобразователя физически перемещаться с охватом поля обзора в процессе ультразвуковой визуализации. Поле обзора, охватываемое перемещением двумерной фазированной решетки элементов 22 преобразователя, может быть заранее определено, например, с учетом угловых границ, времени пребывания, скорости перемещения и т.п.
В примерах вариантов осуществления согласно настоящему описанию блок 20 датчика включает в себя подчиненное электронное устройство 36 формирования лучей, находящееся в электрической связи с двумерной фазированной решеткой элементов преобразователя и служащее для минимизации количества сигналов, передаваемых между блоком 20 датчика и внешним устройством обработки данных (не показано). Подчиненное электронное устройство формирования лучей перемещается с охватом поля обзора посредством механизма перемещения. Например, в патенте США №6491638 раскрыто аналогичное электронное устройство формирования лучей, предназначенное для одномерной решетки элементов преобразователя.
Вернемся к Фигуре 1, где участок 18 основания включает в себя механизм 38 управления шарнирным поворотом, который можно привести в действие для перемещения двумерной фазированной решетки элементов 22 преобразователя по направлению вглубь или за пределы страницы. В примерах вариантов осуществления механизм 38 управления шарнирным поворотом может представлять собой регулировочную головку, связанную через удлиненный корпус 12 с узлом зубчатой передачи (не показан), который также соединен с основанием участка 14 наконечника. Когда пользователь приводит в действие механизм 38 управления шарнирным поворотом, поворачивая регулировочную головку, участок 14 наконечника перемещается относительно участка 18 основания. Например, если пользователь перемещает механизм 38 управления шарнирным поворотом в направлении по часовой стрелке, участок 14 наконечника перемещается по направлению вглубь страницы, а когда пользователь перемещает механизм 38 управления шарнирным поворотом в противоположном направлении, участок 14 наконечника перемещается по направлению за пределы страницы.
В других примерах вариантов осуществления механизм 38 управления шарнирным поворотом может быть связан через корпус 12 с электронным переключателем (не показан), который электронным образом соединен с шаговым двигателем (не показан), связанным (непосредственно или опосредованно) с блоком 20 датчика. Когда пользователь приводит в действие механизм 38 управления шарнирным поворотом в направлении по часовой стрелке, шаговый двигатель перемещает блок 20 датчика по направлению вглубь страницы. Точно так же, когда пользователь приводит в действие механизм 38 управления шарнирным поворотом в противоположном направлении, шаговый двигатель перемещает блок 20 датчика по направлению за пределы страницы.
Обратимся к Фигуре 2, на которой показан пример шарнирного поворота двумерной фазированной решетки элементов 22 преобразователя. Блок 20 датчика показан в неповернутом положении, при котором центр блока 20 датчика изначально располагается в положении 40. Двумерная фазированная решетка элементов 22 преобразователя осуществляет сбор данных в трехмерной пространственной области 42, расположенной спереди участка наконечника в направлении, противоположном направлению расположения участка основания. Хотя и не показано на Фигуре 2, трехмерная пространственная область 42 перемещается по мере того, как механизм 32 перемещения (показанный на Фигуре 1) перемещает двумерную фазированную решетку элементов 22 преобразователя с охватом поля обзора, например заданного поля обзора.
Вернемся к схематичному описанию на Фигуре 2, где механизм управления шарнирным поворотом (показанный на Фигуре 1) был приведен в действие, что вызвало перемещение блока 20 датчика вдоль траектории 44 шарнирного поворота, в результате которого центр блока 20 датчика переместился в положение 46. Шарнирный поворот блока 20 датчика, как показано, приводит к смещению трехмерной пространственной области 42. Таким образом, пользователь/врач-клиницист может направить трехмерную пространственную область 42 в область интереса и получить для этой области ультразвуковые данные с высоким разрешением.
Обратимся к Фигуре 3, на которой показано приложение диагностической трансвагинальной визуализации с использованием типового ультразвукового датчика 10. Ультразвуковой датчик 10 расположен в пациентке 50 для трансвагинальной визуализации плода 52. Если в этом примере сердце плода 52 расположено на правой стороне пациентки 50, то специалист-медик/врач-клиницист (не показан) может привести в действие механизм 38 управления шарнирным поворотом для перемещения двумерной фазированной решетки элементов 22 преобразователя совместно с трехмерной пространственной областью сбора ультразвуковых данных (см. Фигуру 2) в направлении правой стороны пациентки 50 для получения изображений сердца плода 52 с высоким разрешением.
Устройства, системы и способы, представленные в настоящем описании, могут быть использованы для широкого круга приложений по визуализации при ультразвуковой диагностике. Устройства, выполненные согласно идеям настоящего описания, в особенности, пригодны для ультразвуковой диагностической визуализации плода с высоким разрешением. Существенным преимуществом ультразвуковых датчиков, выполненных согласно настоящему описанию, в числе прочих являются повышенные характеристики диагностической визуализации, достигаемые путем перемещения двумерной решетки элементов преобразователя. В настоящем описании, таким образом, предложены ультразвуковые датчики в сборе, которые, в частности, имеют относительно небольшую двумерную решетку элементов преобразователя, расположенную в небольшом корпусе датчика, что позволяет получить небольшой ультразвуковой датчик со сравнительно широким полем обзора. Шарнирный поворот наконечника датчика обеспечивает оптимальное позиционирование двумерной решетки элементов преобразователя для улучшения визуализации.
Хотя настоящее описание было описано со ссылками на примеры вариантов осуществления и примеры приложений, настоящее описание ими не ограничивается. Наоборот, раскрытые устройства, системы и способы допускают различные изменения, модификации, усовершенствования и/или альтернативные приложения без отхода от сущности и объема настоящего изобретения. Более того, настоящее описание определенно включает в себя все подобные изменения, модификации, усовершенствования и альтернативные приложения.
Изобретение относится к медицинской технике, а именно к диагностическим системам и способам ультразвуковой визуализации. Трансвагинальный ультразвуковой датчик содержит удлиненный корпус, включающий участок наконечника, промежуточный участок и участок основания. В пределах участка наконечника корпуса расположен держатель с установленной на нем двумерной фазированной решеткой элементов преобразователя и механизмом перемещения. Держатель имеет ось перемещения, ориентированную перпендикулярно продольной оси корпуса. Двумерная фазированная решетка передает и принимает звуковые волны в пределах трехмерной пространственной области, расположенной спереди участка наконечника, и выполнена с возможностью поворота вокруг оси перемещения. Механизм перемещения перемещает держатель преобразователя вдоль траектории шарнирного поворота таким образом, что достигается регулируемое желаемое с клинической точки зрения поле обзора. Способ выполнения ультразвуковой диагностической визуализации включает приемы работы с ультразвуковым датчиком. Использование изобретения позволяет повысить эффективность сбора данных в клинических условиях и улучшить характеристики диагностической визуализации. 2 н. и 11 з.п. ф-лы, 3 ил.
1. Трансвагинальный ультразвуковой датчик (10) в сборе, содержащий:
удлиненный корпус (12), имеющий продольную ось, который включает в себя участок (14) наконечника, промежуточный участок (16), и участок(18) основания;
двумерную фазированную решетку элементов (22) преобразователя, продолжающуюся в горизонтальном измерении (24) и вертикальном измерении (26), перпендикулярном упомянутому горизонтальному измерению (24), которая установлена на держателе (28) преобразователя, имеющем ось (30) перемещения, ориентированную в целом перпендикулярно продольной оси корпуса, причем держатель преобразователя и упомянутая двумерная фазированная решетка элементов преобразователя расположены в пределах участка (14) наконечника упомянутого удлиненного корпуса (12), причем двумерная фазированная решетка элементов (22) преобразователя выполнена с возможностью передачи и приема звуковых волн в пределах трехмерной пространственной области (42), расположенной спереди участка наконечника в направлении, противоположном направлению расположения участка основания, и выполнена с возможностью поворота вокруг оси перемещения; и
механизм (32) перемещения для физического перемещения держателя (28) преобразователя, оси (30) перемещения и двумерной фазированной решетки элементов (22) преобразователя для изменения ориентации оси перемещения относительно продольной оси так, чтобы обеспечить регулируемое желаемое с клинической точки зрения поле обзора путем перемещения трехмерной пространственной области вдоль траектории (44) шарнирного поворота, причем держатель преобразователя, ось перемещения и двумерная фазированная решетка элементов (22) преобразователя соединены с механизмом (32) перемещения, и механизм (32) перемещения выполнен с возможностью перемещения трехмерной пространственной области в разные положения вдоль траектории шарнирного поворота.
2. Трансвагинальный ультразвуковой датчик (10) в сборе по п.1, в котором ось (30) перемещения в одном положении вдоль траектории (44) шарнирного поворота перпендикулярна продольной оси, определяемой упомянутым удлиненным корпусом (12).
3. Трансвагинальный ультразвуковой датчик (10) в сборе по п.1, в котором двумерная фазированная решетка элементов (22) преобразователя представляет собой плоскую матричную решетку.
4. Трансвагинальный ультразвуковой датчик (10) в сборе по п.1, в котором конфигурация и размеры удлиненного корпуса (12) приспособлены к анатомическим ограничениям.
5. Трансвагинальный ультразвуковой датчик (10) в сборе по п.1, дополнительно содержащий подчиненное электронное устройство (36) формирования лучей, находящееся в электрической связи с упомянутой двумерной фазированной решеткой элементов (22) преобразователя; при этом упомянутое подчиненное электронное устройство (36) формирования лучей перемещается с охватом поля обзора посредством упомянутого механизма (32) перемещения.
6. Трансвагинальный ультразвуковой датчик (10) в сборе по п.1, в котором механизм (32) перемещения дополнительно содержит механизм (38) управления шарнирным поворотом для управления шарнирным поворотом упомянутой двумерной фазированной решетки элементов (22) преобразователя относительно упомянутого удлиненного корпуса (12).
7. Трансвагинальный ультразвуковой датчик (10) в сборе по п.6, в котором упомянутый механизм (38) управления шарнирным поворотом управляет шарнирным поворотом упомянутой двумерной фазированной решетки элементов (22) преобразователя относительно упомянутого удлиненного корпуса (12) в направлении, по существу, перпендикулярном продольной оси упомянутого удлиненного корпуса (12).
8. Трансвагинальный ультразвуковой датчик (10) в сборе по п.7, в котором упомянутый удлиненный корпус (12) дополнительно включает в себя промежуточный участок (16), примыкающий к участку (14) наконечника, и участок (18) основания, примыкающий к промежуточному участку (16), при этом упомянутый механизм (38) управления шарнирным поворотом выполнен с возможностью перемещения участка (14) наконечника относительно участка (18) основания, посредством чего упомянутая двумерная фазированная решетка элементов (22) преобразователя шарнирно поворачивается относительно участка (18) основания упомянутого удлиненного корпуса (12).
9. Способ выполнения ультразвуковой диагностической визуализации, содержащий этапы, на которых:
обеспечивают ультразвуковой датчик (10) в сборе в участке наконечника удлиненного корпуса (12), который включает в себя участок наконечника, промежуточный участок (16) и участок (18) основания, причем участок наконечника, промежуточный участок и участок основания расположены вдоль продольной оси удлиненного корпуса, при этом ультразвуковой датчик в сборе дополнительно включает в себя двумерную фазированную решетку элементов (22) преобразователя, размещенную в пределах участка (14) наконечника, при этом упомянутая двумерная фазированная решетка элементов (22) преобразователя продолжается в горизонтальном измерении (24) и в вертикальном измерении (26), перпендикулярном упомянутому горизонтальному измерению (24), причем двумерная фазированная решетка элементов (22) преобразователя также выполнена с возможностью передачи и приема звуковых волн в пределах трехмерной пространственной области (42), расположенной спереди участка наконечника вдоль продольной оси в направлении, противоположном направлению расположения участка основания; и
физически перемещают упомянутую двумерную фазированную решетку элементов (22) преобразователя вокруг оси (30) перемещения в первом направлении, отличном от направления продольной оси, и перемещают датчик в сборе вдоль траектории (44) шарнирного поворота во втором направлении, отличном от направления продольной оси, с помощью механизма (32) перемещения для обеспечения желаемого с клинической точки зрения поля обзора посредством механизма перемещения, при этом двумерная фазированная решетка элементов (22) преобразователя присоединена с возможностью изменения положения посредством механизма (32) перемещения.
10. Способ выполнения ультразвуковой диагностической визуализации по п.9, в котором упомянутый этап перемещения включает в себя физическое перемещение упомянутой двумерной фазированной решетки элементов (22) преобразователя вокруг оси (30) перемещения, перпендикулярной продольной оси упомянутого удлиненного корпуса (12).
11. Способ выполнения ультразвуковой диагностической визуализации по п.9, дополнительно содержащий этап отображения вида толстого среза с использованием данных, собранных в вертикальном измерении (26).
12. Способ выполнения ультразвуковой диагностической визуализации по п.9, в котором перемещение датчика в сборе вдоль траектории (44) шарнирного поворота дополнительно содержит этап физического шарнирного поворота, выполняемого посредством механизма (38) управления шарнирным поворотом, упомянутой двумерной фазированной решетки элементов (22) преобразователя относительно продольной оси упомянутого удлиненного корпуса (12) в направлении целевой области.
13. Способ выполнения ультразвуковой диагностической визуализации по п.12, в котором упомянутый этап шарнирного поворота включает в себя физический шарнирный поворот упомянутого участка (14) наконечника относительно продольной оси упомянутого удлиненного корпуса (12) по отношению к целевой области.
| WO 2006119173 A1, 09.11.2006 | |||
| US 2003018269 A1, 23.01.2003 | |||
| US 6419633 B1, 16.07.2002 | |||
| US 5191890 A, 09.03.1993 | |||
| 0 |
|
SU80105A1 | |

