Данное изобретение относится к медицинским диагностическим ультразвуковым зондам для получения изображения тела и, в частности, к ультразвуковым зондам, выполняющим трехмерное (3D) сканирование.
Обычные ультразвуковые зонды для получения изображения сканируют и предоставляют информацию сигнала, отраженного от плоской области тела, и формируют двухмерное (2D) изображение. В последние годы были разработаны 3D зонды для сканирования и получения изображения объемных областей тела. Трехмерные зонды для визуализации дают возможность осматривать, например, полость сердца целиком в трех измерениях в реальном времени. 3D зонды для данного применения, как правило, являются либо электронными, либо механическими. Электронный 3D зонд направляет переданные пучки в трех измерениях электронным образом с помощью двухмерного матричного преобразователя, как показано в патенте США US 5997479 (Savord и др.), например. При расположении элементов преобразователя в двух измерениях, переданные и принимаемые пучки могут направляться в трех измерениях посредством фазированного механизма направления пучков. Механический 3D зонд использует одномерный (1D) матричный преобразователь типа, применяемого для стандартного получения 2D изображения, и генерирует его возвратно-поступательные колебания. Это заставляет плоскость изображения 1D матрицы проходить через объемную область. Достоинство механического 3D зонда состоит в том, что он использует традиционную технологию 1D матрицы, но с тем ограничением, что необходимо применять механическое устройство для развертывания 1D матрицы.
Существуют несколько способов развертывания 1D матрицы. Один способ заключается в том, чтобы вращать 1D матрицу вокруг ее центра, как показано в патенте США US 5159931 (Pini). Вращение 1D матрицы сканирует цилиндрическую или коническую объемную область. Другой подход состоит в возвратно-поступательном колебании матрицы так, чтобы плоскость изображения проходила через клинообразную объемную область. Примеры данной методики развертывания представлены в патентах США US 5152294 (Mochizuki и др.), 5460179 (Okunuki и др.) и 6572548 (Cerofolini). Клин является узким в апертуре зонда и расширяется в глубине тела. Механический зонд патента '179 сконструирован специально для того, чтобы иметь точную ось на вершине клина, с той целью, чтобы зонд мог получать изображения между ребер.
Все эти 3D механические методики сканирования обеспечивают объемное изображение, которое является очень узким в точке непосредственно перед зондом. Однако существуют диагностические приложения, в которых необходимо иметь широкую зону обзора непосредственно перед зондом. Широкая зона обзора в ближней зоне может быть особенно полезна для сканирования плода, например, когда плод расположен близко к стенке брюшной полости. Соответственно, требуется механический 3D зонд, который сканирует широкую зону обзора непосредственно перед зондом.
В соответствии с принципами настоящего изобретения, описывается ультразвуковой 3D зонд, сканирующий широкую зону обзора перед апертурой зонда. В зонде установлен 1D матричный преобразователь, перемещающийся возвратно-поступательно по всей поверхности качения, предпочтительно сформированной в зонде в виде набора изогнутых направляющих. Матрица преобразователя установлена на каретке, которая перемещается вперед и назад по направляющим с помощью ремня или шнура, приводимого в движение электроприводом. В иллюстрируемом примере настоящего изобретения, шнур, который перемещает каретку преобразователя, обвивает кулачок, поддерживающий нужное натяжение шнура по мере того, как каретка перемещается по своей дугообразной траектории движения. В сконструированном варианте осуществления привод генерирует колебательные движения кулачка, чтобы приводить в движение шнур и перемещать 1D матрицу преобразователя по его траектории объемного сканирования.
На чертежах:
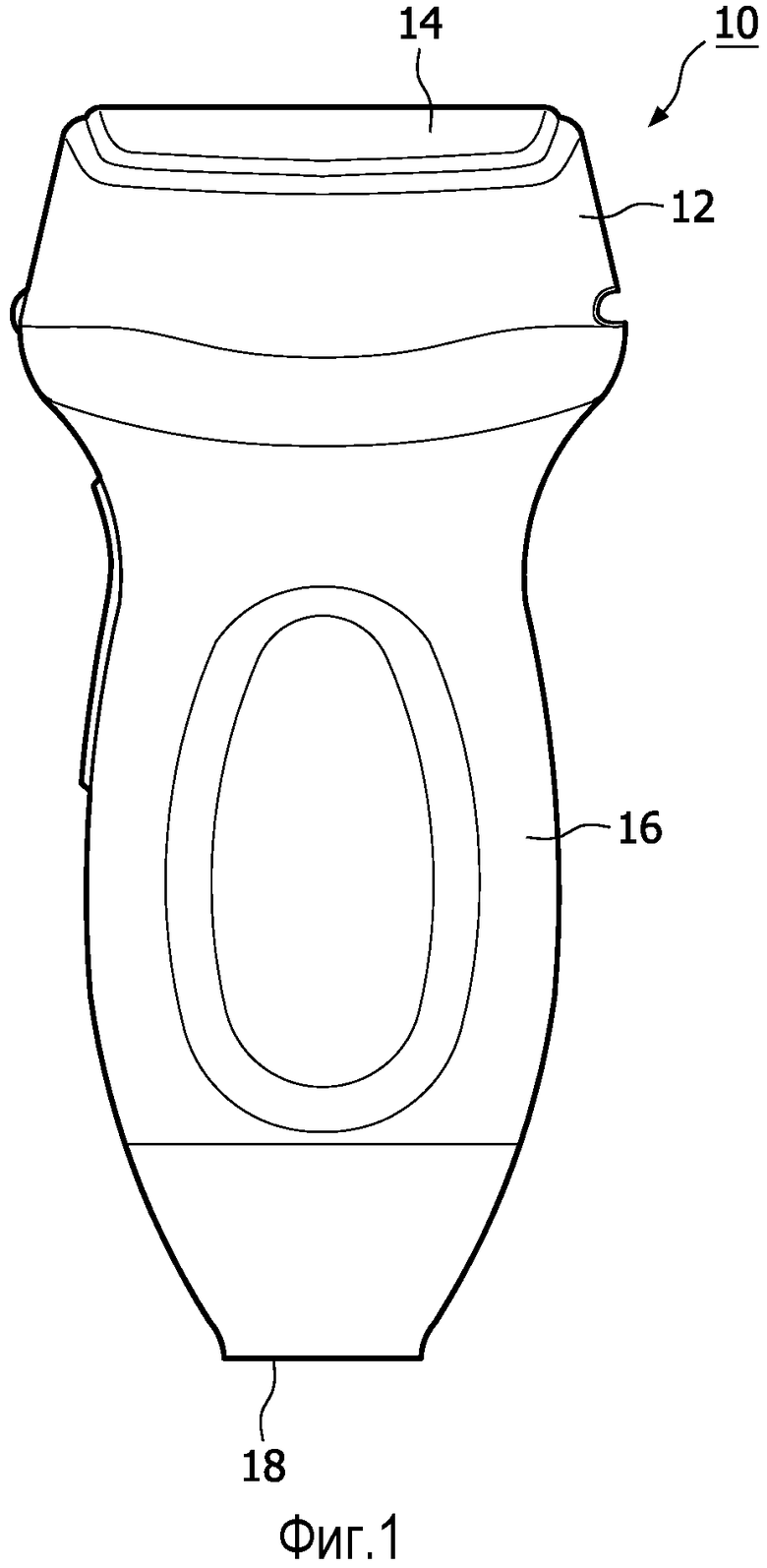
На Фиг.1 представлен внешний вид механического 3D зонда, согласно настоящему изобретению.
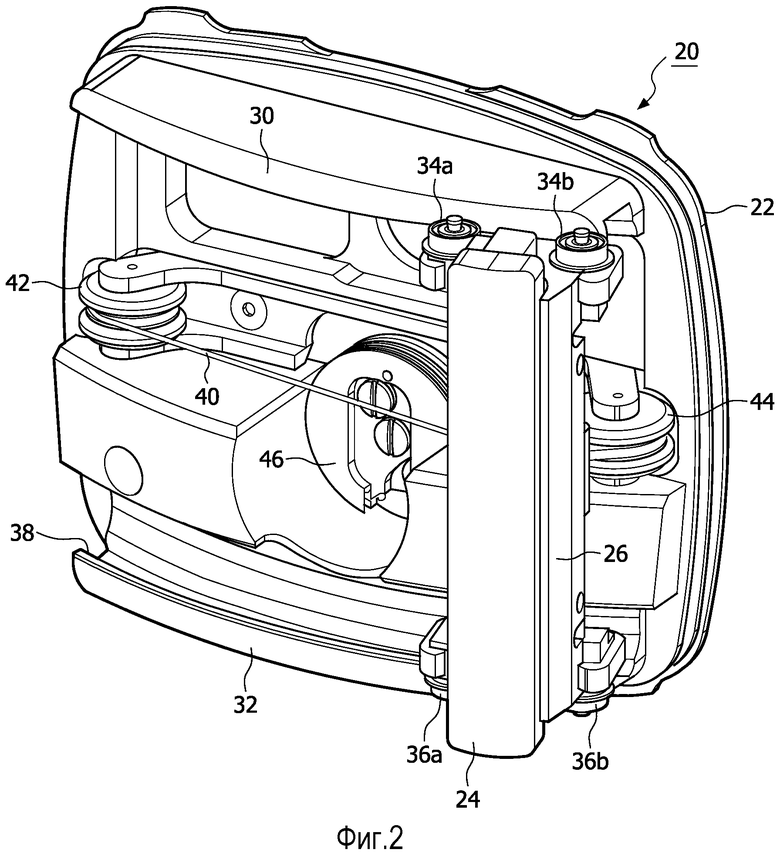
Фиг.2 представляет собой вид в перспективе механического узла 3D зонда, согласно настоящему изобретению, если смотреть сверху матрицы преобразователя.
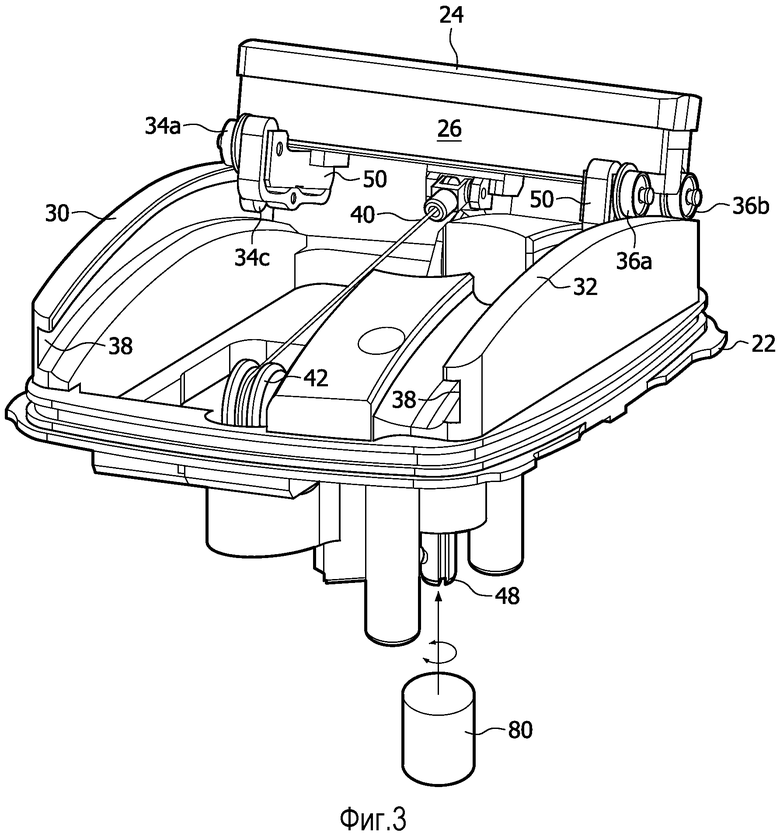
Фиг.3 представляет собой вид в перспективе механического узла зонда по Фиг.2, если смотреть сбоку.
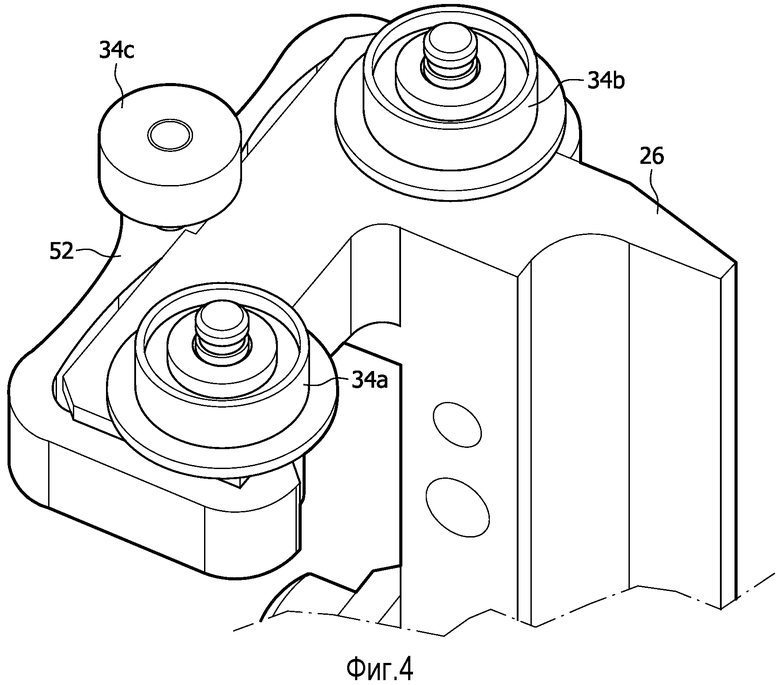
Фиг.4 является подробным видом в перспективе опорной конструкции на конце каретки механического узла по Фиг.2.
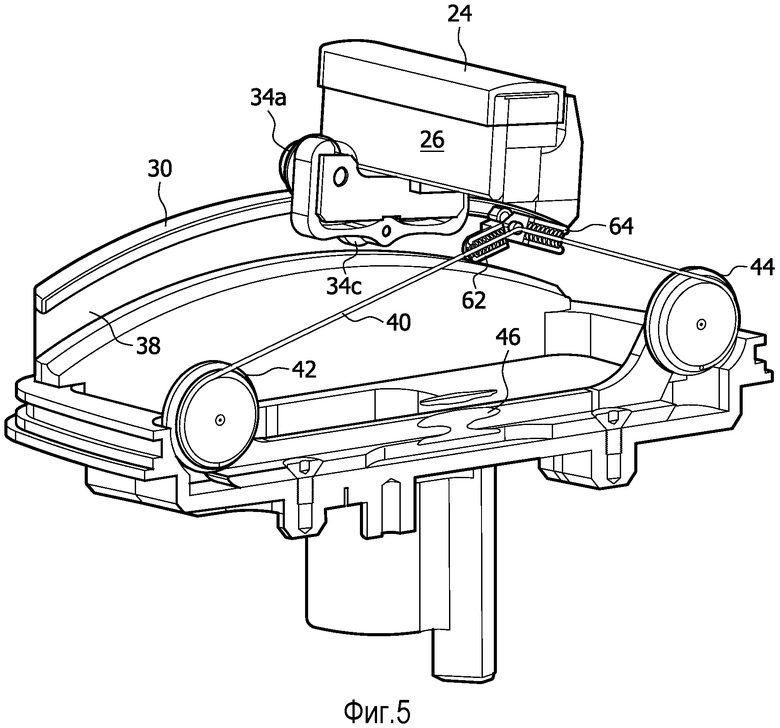
На Фиг.5 представлен вид в перспективе в разрезе, иллюстрирующий шнур и натяжные шкивы механического узла по Фиг.2.
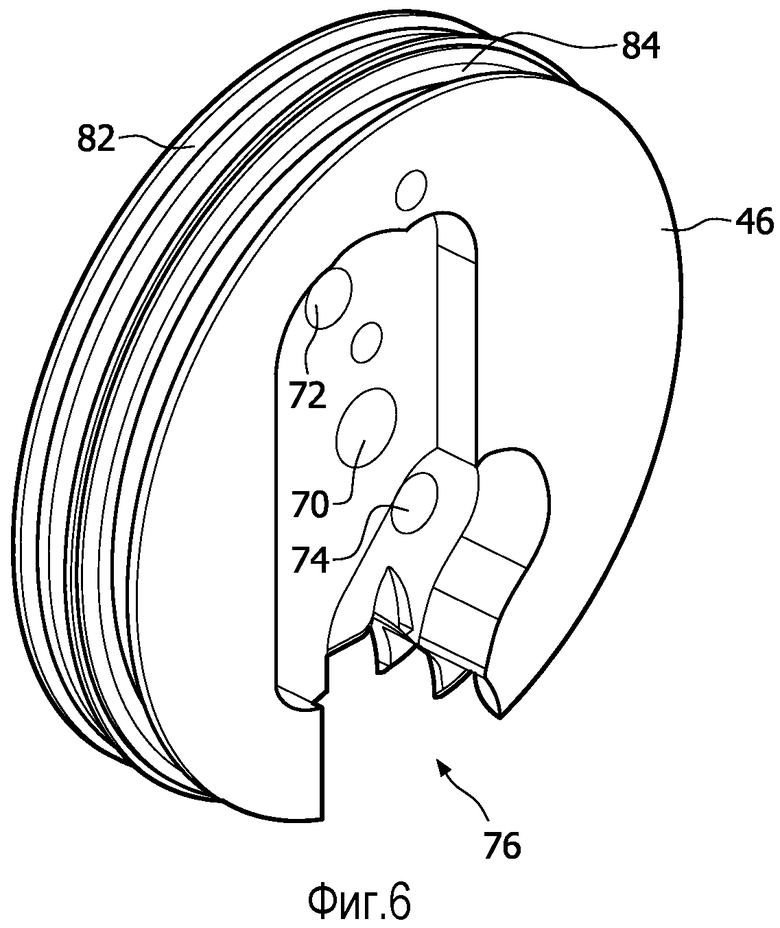
Фиг.6 представляет собой вид в перспективе приводного кулачка механического узла по Фиг.2.
Прежде всего, ссылаясь на Фиг.1, ультразвуковой 3D зонд 10, сконструированный в соответствии с принципами настоящего изобретения, показан снаружи. Зонд включает в себя внешний корпус, имеющий дистальный конец 12, внутри которого установлен узел 20 преобразователя (см. Фиг.2) таким образом, что плоскость изображения перемещающейся матрицы преобразователя распространяется от линзы или торцевой насадки 14. Матрица преобразователя расположена в отсеке для жидкости внутри дистального конца 12, содержащем жидкую среду, такую как минеральное масло, которая акустически соединяет ультразвуковую энергию между матрицей преобразователя и торцевой насадкой 14. По мере того, как матрица преобразователя перемещается вперед и назад, ее плоскость изображения проходит сквозь объемную область перед торцевой насадкой 14 для осуществления 3D сканирования материала в объемной области. На расстоянии, между матрицей преобразователя и наружной поверхностью торцевой насадки 14, плоскость изображения расходится так, что она может сканировать относительно широкую апертуру в ближней зоне прямо перед торцевой насадкой. Зонд 10 имеет рукоятку 16 ниже дистального конца, в которой устроено электрическое соединение гибких проводников в цепи, прикрепленных к элементам матрицы преобразователя, с выводимыми на зажимы проводниками шнура. Шнур (не показан) проходит от корпуса зонда через компенсатор натяжения, расположенный с проксимального конца 18 корпуса зонда. При использовании, специалист по ультразвуковой эхографии держит зонд за рукоятку и надавливает на кожу пациента торцевой насадкой для получения изображения объемной области тела пациента, находящейся перед торцевой насадкой.
Фиг.2 представляет собой вид узла 20 преобразователя, если смотреть сверху матрицы 24 преобразователя. Матрица 24 преобразователя установлена на узле 26 каретки, который перемещается вперед и назад (слева направо и вновь в обратном направлении на Фиг.2) вдоль пары направляющих 30, 32. С каждого конца узла каретки имеется группа шарикоподшипниковых роликов 34,36, которые катятся по направляющим 30, 32. Узел 26 каретки перемещается вперед и назад с помощью шнура 40, прикрепленного к нижней части узла каретки, как более подробно показано на Фиг.5. Из точек прикрепления к узлу каретки шнур 40 проходит вокруг пары натяжных шкивов 42,44, а затем частично вокруг кольцевых канавок кулачка 46. Концы шнура 40 прикрепляются на винтах в середине кулачка 46. Кулачок вращается возвратно-поступательно посредством бесщеточного электродвигателя 80 постоянного тока, прикрепленного к кулачковому валу 48, проходящему из донной части кулачка в рукоятку, где расположен электродвигатель. См. Фиг.3.
Вышеупомянутые компоненты узла 20 преобразователя установлены на перегородке 22. Перегородка по периметру имеет канавки, в которые помещаются уплотнительные кольца, герметично отделяющие отсек для жидкости, в котором расположен узел 26 каретки, от внутренней части рукоятки 16 зонда, в которой размещены электрические соединения электропривода и преобразователя/шнура. От матрицы 24 преобразователя через уплотнение в перегородке к внутренней части рукоятки проходит гибкий электрический контур, а кулачковый вал 48 герметизируется посредством прохождения через динамическое жидкостное уплотнение в перегородке 22. Жидкостный канал проходит через перегородку для прикрепления к неэластичному баллону внутри рукоятки, который обеспечивает компенсацию изменений в жидкостном объеме с помощью давления и температуры, как описывается в публикации заявки на международный патент WO 2005/094690 (Wickline и др.).
Шарикоподшипниковые ролики, находящиеся на концах узла 26 каретки, составлены в наборы из трех роликов, два из которых катятся по верху направляющих 30, 32 и еще один катится внутри углубления 38 на боковой стороне каждой направляющей. На виде по Фиг.2, ролики 34а и 34b на одном конце узла каретки и ролики 36а и 36b на другом конце узла каретки являются роликами, катящимися по верхней поверхности направляющих 30 и 32. Направляющие 30, 32 в данном примере слегка искривлены в виде дуги. Такой немного цилиндрический профиль направляющих определяет траекторию движения узла каретки и заставляет плоскость матрицы преобразователя проходить через скорее трапециевидный объем, чем просто квадратный или прямоугольный объем, обеспечивая более широкую зону обзора, чем могло бы дать использование плоских, линейных направляющих. Последовательные плоскости изображения, сканируемые матричным преобразователем по мере его перемещения вперед и назад, таким образом, расходятся с увеличением по вертикали плоскостей при движении матрицы преобразователя.
Фиг.3 представляет собой вид узла 20 преобразователя, по Фиг.2, если смотреть сбоку. В данной проекции ролики 36а и 36b можно видеть катящимися по верху направляющей 32, а ролик 34а виден катящимся по верху направляющей 30. Ролик 34с, который катится внутри углубления 38 направляющей 30, виден частично с левой стороны узла 26 каретки. Цилиндрическая дуга направляющих 30, 32 также четко показана на данном чертеже. Ролики установлены на подшипниковых опорах 50, которые прикреплены к донной части узла каретки. На данной проекции видно шарнирное соединение шнура 40 с нижней частью узла каретки. Кулачковый вал 48 показан выступающим из донной части перегородки 22.
Фиг.4 является другим вариантом осуществления прикрепления роликов к узлу 26 каретки, в котором подшипниковая опора 50 встроена в донную часть узла 26 каретки. Верхние ролики 34а и 34b установлены со стороны узла каретки, а опорная скоба 52, к которой крепится нижний ролик 34с, катящийся в углублении 38, обеспечивает предварительную нагрузку узла каретки относительно перегородки 22.
На Фиг.5 представлен вид в разрезе, проходящем через центры натяжных шкивов 42 и 44. На данной проекции показаны соединения концов шнура с соединительными элементами 62,64 шнура, шарнирно прикрепленными к нижней части узла каретки. Обжимные шаровые наконечники на концах шнура надавливают на пружины внутри соединительных элементов, что обеспечивает непрерывное натяжение шнура во время передвижения им узла 26 каретки вперед и назад вдоль направляющих 30 и 32.
Фиг.6 иллюстрирует кулачок 46 в перспективе. Шнур от натяжных шкивов 42 и 44 обматывается вокруг кулачка 46 по канавкам 82 и 84 по периметру кулачка, и концы шнура проходят во внутреннюю часть 76 кулачка и крепятся к кулачку винтами, которые ввинчиваются в резьбовые отверстия 72 и 74. Центральное резьбовое отверстие 70 обеспечивает крепление кулачка на одной оси с кулачковым валом 48 на задней стороне кулачка. В данном примере кулачок является не идеально круглым, а слегка продолговатым. Данная несимметричная форма кулачка заставляет узел каретки перемещаться прямолинейно при его возвратно-поступательном движении вдоль дугообразных направляющих 30 и 32. Прямолинейное перемещение обеспечивает постоянный интервал ультразвуковых пучков и плоскости изображения, создаваемой матрицей преобразователя по мере ее движения вперед и назад для получения последовательно сканируемого объемного изображения. В сконструированном варианте осуществления кулачок перемещается приблизительно на 180º, поскольку сначала он вращается в одном направлении (например, по часовой стрелке), а затем в другом (против часовой стрелки), чтобы переместить узел каретки от одного конца направляющей к другому и затем обратно.
Специалистам в данной области легко придут на ум другие варианты. Например, вместо шнура 40 для соединения привода с узлом каретки можно использовать шарико-винтовую передачу, ремни или цепь. Направляющие необязательно должны быть изогнуты дугообразно, а могут быть прямолинейными, если необходимо получить более прямоугольное объемное изображение. Механизм направляющих, приводимый в движение шнуром, как описано выше, может обеспечить уменьшение веса приблизительно на 40% по сравнению с механизмами поворотных рычагов известного уровня техники. Данный эффективный, компактный механизм требует только, чтобы электропривод располагался внутри рукоятки, давая возможность сконструировать зонд с более узкой в обхвате рукояткой или размером ручки, чем в случае других механических 3D зондов известного уровня техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |
| МАШИНА КЛЕЕВАЯ-КРОМКОЗАГИБОЧНАЯ ПОВОРОТНАЯ, РАБОТАЮЩАЯ В ПРЕРЫВИСТОМ РЕЖИМЕ И ПРЕДНАЗНАЧЕННАЯ ДЛЯ ПОЛУЧЕНИЯ МЕТАЛЛИЧЕСКИХ КРЫШЕК БОЛЬШОГО РАЗМЕРА И РАЗНОЙ ФОРМЫ | 2010 |
|
RU2559068C2 |
| УЛЬТРАЗВУКОВОЙ ЗОНД-ПРЕОБРАЗОВАТЕЛЬ С ФОРМИРОВАТЕЛЕМ МИКРОПУЧКА ДЛЯ МУЛЬТИЛИНЕЙНОЙ ВИЗУАЛИЗАЦИИ | 2013 |
|
RU2656184C2 |
| МАТРИЧНЫЙ УЛЬТРАЗВУКОВОЙ ЗОНД С ПАССИВНЫМ РАССЕЯНИЕМ ТЕПЛА | 2012 |
|
RU2604705C2 |
| НАПРАВЛЯЕМЫЕ УЛЬТРАЗВУКОМ БИОПСИИ В ТРЕХ ИЗМЕРЕНИЯХ | 2013 |
|
RU2629237C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ УЛЬТРАЗВУКОВАЯ СИСТЕМА | 2018 |
|
RU2759235C2 |
| ШТАМПОВАННАЯ ПРЕЦИЗИОННАЯ ПАТРОННАЯ ГИЛЬЗА | 2013 |
|
RU2732462C1 |
| ТРЕХМЕРНОЕ УЛЬТРАЗВУКОВОЕ НАВЕДЕНИЕ МНОЖЕСТВА ИНВАЗИВНЫХ УСТРОЙСТВ | 2013 |
|
RU2644540C2 |
| Стенд для испытания ремней безопасности транспортного средства,элементов их крепления и подтягивающих устройств | 1983 |
|
SU1134902A1 |
| МАТРИЦЫ УЛЬТРАЗВУКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ С ПЕРЕМЕННЫМИ ГЕОМЕТРИЯМИ УЧАСТКОВ ПОВЕРХНОСТИ | 2013 |
|
RU2638967C2 |
Изобретение относится к медицинским диагностическим ультразвуковым зондам для получения изображения тела. Зонд, сканирующий объемную область посредством перемещения матричного преобразователя, содержит корпус, имеющий торцевую насадку с отсеком для жидкости на дистальном конце и рукоятку ниже дистального конца, матричный преобразователь, установленный на узле каретки в отсеке для жидкости, пару направляющих, по которым узел каретки передвигается в отсеке для жидкости, ролики, расположенные на упомянутых концах узла каретки, включающие в себя ролик, катящийся по верху направляющих, и ролик, катящийся внутри углубления направляющих, шнур, соединенный с узлом каретки, вращаемый кулачок, вокруг которого намотан шнур, при этом кулачок прикреплен на одной оси к кулачковому валу, проходящему из донной части кулачка в рукоятку, и электродвигатель, расположенный в рукоятке и оперативно подсоединенный к кулачковому валу для того, чтобы перемещать узел каретки и матричный преобразователь по направляющим. Использование изобретения позволяет повысить ширину зоны обзора в ближней зоне перед зондом. 11 з.п. ф-лы, 6 ил.
1. Ультразвуковой зонд, сканирующий объемную область посредством перемещения матричного преобразователя, содержащий:
корпус (12) зонда, имеющий торцевую насадку (14), имеющую отсек для жидкости на дистальном конце (12) и рукоятку (16) ниже дистального конца;
матричный преобразователь (24), установленный на узле каретки в отсеке для жидкости;
пару направляющих (30, 32), по которым узел каретки передвигается в отсеке для жидкости,
ролики, расположенные на упомянутых концах узла каретки, включающие в себя ролик (34a, 36a), катящийся по верху упомянутых направляющих, и ролик (34c), катящийся внутри углубления (38) упомянутых направляющих;
шнур (40), соединенный с узлом каретки,
вращаемый кулачок (46), вокруг которого намотан упомянутый шнур, при этом кулачок прикреплен на одной оси к кулачковому валу (48), проходящему из донной части кулачка в рукоятку (16), и
электродвигатель, расположенный в рукоятке и оперативно подсоединенный к кулачковому валу (48) для того, чтобы перемещать узел каретки и матричный преобразователь по направляющим.
2. Ультразвуковой зонд по п.1, в котором ролики являются шарикоподшипниковыми роликами.
3. Ультразвуковой зонд по п.1, в котором шнур соединяет электродвигатель и узел каретки.
4. Ультразвуковой зонд по п.3, в котором шнур огибает, по меньшей мере, часть поверхности кулачка, для того чтобы обеспечить относительно прямолинейное движение узла каретки.
5. Ультразвуковой зонд по п.4, в котором электродвигатель соединен с кулачком, чтобы приводить кулачок во вращение в различных направлениях,
в котором концы шнура прикреплены к кулачку.
6. Ультразвуковой зонд по п.4, в котором поверхность кулачка является овальной, для того чтобы приводить узел каретки в относительно прямолинейное движение между концами направляющих.
7. Ультразвуковой зонд по п.4, дополнительно содержащий натяжные шкивы, вокруг которых шнур обвит между узлом каретки и кулачком.
8. Ультразвуковой зонд по п.3, в котором шнур соединен с узлом каретки посредством пружинных соединительных элементов для обеспечения натяжения шнура.
9. Ультразвуковой зонд по п.1, в котором через торцевую насадку ультразвуковая энергия проходит в и из матричного преобразователя,
причем соединяющая жидкость располагается между матричным преобразователем и внутренней поверхностью торцевой насадки.
10. Ультразвуковой зонд по п.1, в котором направляющие имеют изогнутую форму с тем, чтобы обеспечить дугообразную траекторию движения матричного преобразователя.
11. Ультразвуковой зонд по п.10, в котором дугообразная траектория движения заставляет плоскость изображения матричного преобразователя расходиться с увеличением по вертикали при перемещении матрицы преобразователя.
12. Ультразвуковой зонд по п.1, в котором направляющие имеют плоскую форму с тем, чтобы обеспечить прямолинейную траекторию движения матричного преобразователя.
| US2007016060 A1, 18.01.2007 | |||
| WO2005096266 A1, 13.10.2005 | |||
| US5152294 A, 06.10.1992 | |||
| Машина для автоматического формования тестовых заготовок бубликов | 1960 |
|
SU133007A1 |
| 1971 |
|
SU410776A1 | |
| Ультразвуковой сканирующий преобразователь | 1985 |
|
SU1653741A1 |
| Ультразвуковой преобразователь для исследования биологических сред | 1985 |
|
SU1337053A1 |

