Изобретение относится к средствам снижения уровня демаскирующих признаков (заметности) летательного аппарата (ЛА), в частности его силовой установки (СУ).
Известен способ снижения заметности силовой установки летательного аппарата в радиолокационном (РЛ), инфракрасном (ИК) и акустическом (АК) диапазонах длин волн (RU, №2215669 С1).
При осуществлении известного способа обеспечивается возможность снижения заметности силовой установки летательного аппарата в радиолокационном, инфракрасном, акустическом диапазонах длин волн путем установки в потоке газа внутри сопла экранирующего приспособления, которое выполняют в виде противорадиолокационной и противоинфракрасной решеток, уменьшающих также акустическую заметность.
В качестве недостатков известного способа следует отметить увеличение веса силовой установки, вызванного введением дополнительных конструктивных элементов, включая механизм уборки-выпуска, а для многорежимного ТРД возникает еще и необходимость специальной защиты решеток (даже в убранном положении) от теплового воздействия потока выхлопных газов при форсажном режиме работы двигателя. Кроме того, по этому способу не возможна имитация по какому-либо закону движения источника излучения на фоне одновременно выбрасываемых ложных тепловых целей.
Технический результат, на достижение которого направлено изобретение, заключается в обеспечении возможности снижения демаскирующих признаков (заметности) реактивного двигателя, размещенного на летательном аппарате и оснащенного поворотным соплом, в инфракрасном и радиолокационном диапазонах длин волн без использования дополнительных устройств, расположенных в газовом тракте реактивного двигателя и тем самым влияющих на его работу.
Указанный технический результат в первом варианте достигается тем, что в способе снижения уровня демаскирующих признаков реактивного двигателя, размещенного на летательном аппарате и оснащенного поворотным соплом, при котором осуществляют экранирование нагретых внутренних элементов двигателя, экранирование осуществляют путем отклонения сопла при бесфорсажном режиме работы двигателя на фиксированный угол и удержания его в этом положении, при этом одновременно с отклонением сопла осуществляют отклонение органов управления летательным аппаратом для обеспечения аэродинамической балансировки летательного аппарата в установившемся полете.
Включение режима снижения уровня демаскирующих признаков с использованием отклонения сопла может производить летчик, который одновременно или заранее переводит ручку управления двигателем (РУД) в положение, соответствующее бесфорсажному режиму работы двигателя.
Включение режима снижения уровня демаскирующих признаков может производиться по сигналу системы предупреждения о ракетной атаке при условии, что положение РУД соответствует бесфорсажному режиму работы двигателя.
Включение режима снижения уровня демаскирующих признаков может производиться в соответствии с положением РУД, которое соответствует режиму малой заметности (МЗ) - бесфорсажному режиму с подачей сигнала на отклонение сопла по заложенному в систему закону.
Указанный технический результат во втором варианте достигается тем, что в способе снижения уровня демаскирующих признаков реактивного двигателя, размещенного на летательном аппарате и оснащенного поворотным соплом, при котором осуществляют экранирование нагретых внутренних элементов двигателя, экранирование осуществляют путем совершения соплом колебательных движений на угол δ при бесфорсажном режиме работы двигателя, при этом одновременно с колебательными движениями сопла осуществляют отклонение органов управления летательным аппаратом для обеспечения аэродинамической балансировки летательного аппарата в установившемся полете.
Угол отклонения сопла при совершении им колебательных движений δ может изменяться во времени по периодическому закону, определяемому соотношением:
 ,
,
где ak, bk - амплитуды колебаний сопла на k-той гармонике, fk - частота k-той гармоники колебаний сопла, t - время, N - количество гармоник колебаний сопла.
При оснащении двигателя соплом с возможностью всеракурсного отклонения угол ω наклона оси, вокруг которой поворачивается сопло, может изменяться во времени по квазипериодическому закону, определяемому соотношением:
 ,
,
где ck, dk - амплитуды изменений (колебаний) угла наклона оси, вокруг которой поворачивается сопло, на k-той гармонике, lk - частота k-той гармоники изменений (колебаний) угла ω наклона оси, t - время, N - количество гармоник колебаний угла ω наклона оси, ω0 - начальное значение угла ω наклона оси, ω' - средняя за период скорость колебания угла ω наклона оси.
Углы δ и ω могут находиться в зависимости, определяемой соотношением:
 ,
,
где ab, bk - амплитуды колебаний сопла на k-той гармонике, vk - частота k-той гармоники колебаний сопла, N - количество гармоник колебаний сопла, ω=ω0+ω't, ω0 - начальное значение угла ω наклона оси, вокруг которой поворачивается сопло, ω' - средняя за период скорость колебания угла ω наклона оси.
Включение режима снижения уровня демаскирующих признаков с использованием отклонения сопла может производить летчик, который одновременно или заранее переводит РУД в положение, соответствующее бесфорсажному режиму работы двигателя.
Включение режима снижения уровня демаскирующих признаков может производиться по сигналу системы предупреждения о ракетной атаке при условии, что положение РУД соответствует бесфорсажному режиму работы двигателя.
Включение режима снижения уровня демаскирующих признаков может производиться в соответствии с положением РУД, которое соответствует режиму МЗ - бесфорсажному режиму с подачей сигнала на отклонение сопла по заложенному в систему закону.
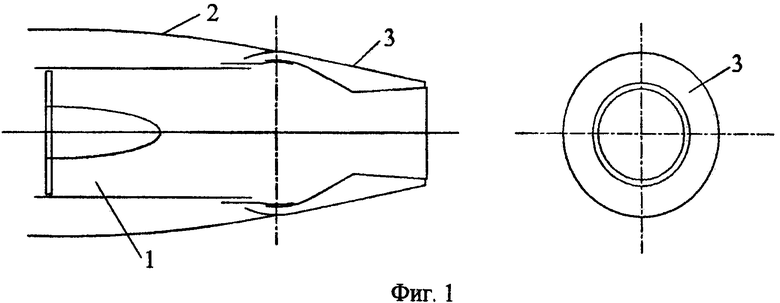
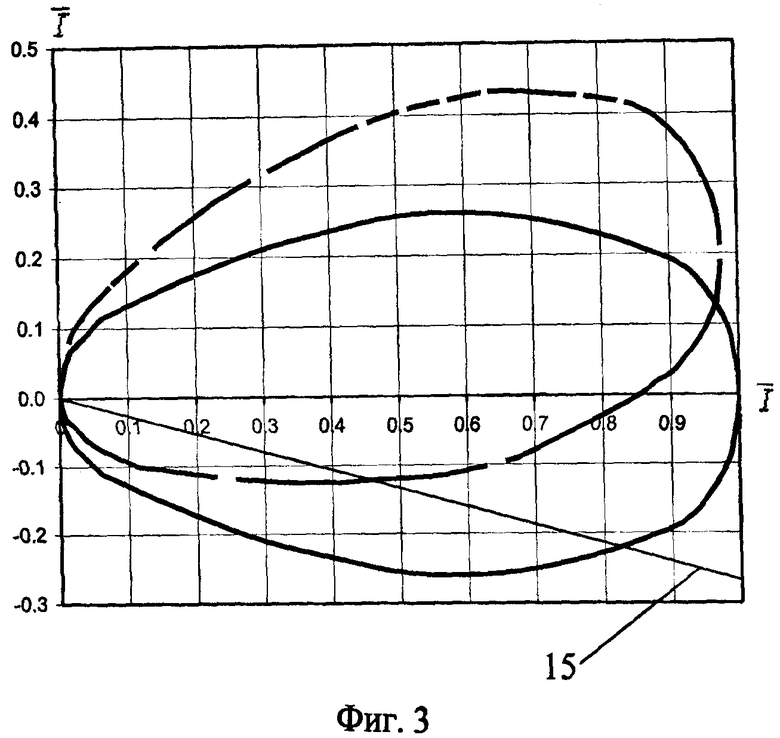
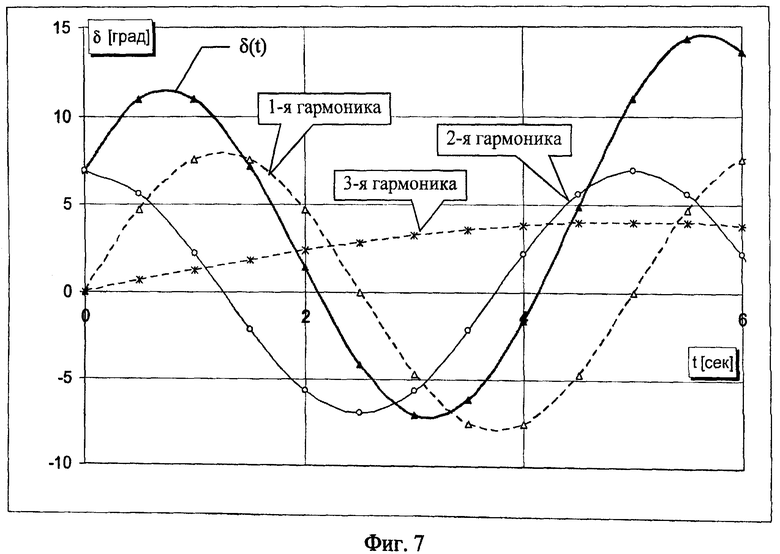
Сущность способа поясняется чертежами на примере сопла, в котором обеспечено совместное отклонение дозвуковой (суживающейся) и сверхзвуковой (расширяющейся) частей сопла, где на фиг.1 изображена схема сопла в исходном положении; на фиг.2 - схема сопла в отклоненном положении; на фиг.3 - индикатриса ИК-излучения при исходном положении сопла и при его отклонении; на фиг.4 - блок-схема системы управления в первом варианте; на фиг.5 - блок-схема системы управления во втором варианте; на фиг.6 - блок-схема системы управления в третьем варианте; на фиг.7 в качестве примера представлен фрагмент закона циклического отклонения сопла (изменения угла δ по времени). Закон сформирован тремя гармониками, для которых:
1) a1=8; f1=0,2; 2) b1=7; f1=0,2; 3) а2=4; f2=0,05;
δ (t)=8 sin (0,4 πt)+7cos (0,4 πt)+4 sin (0,1 πt);
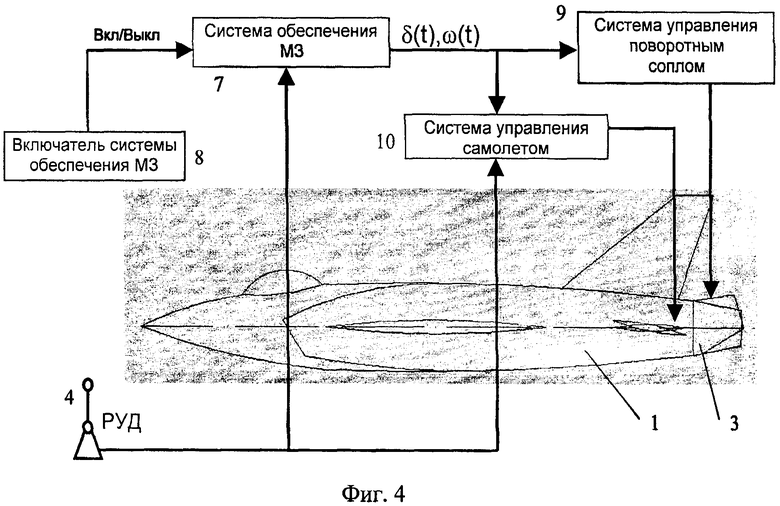
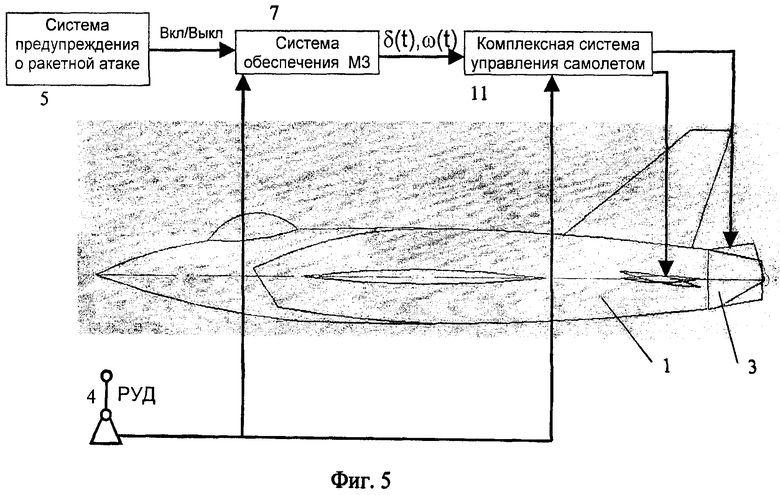
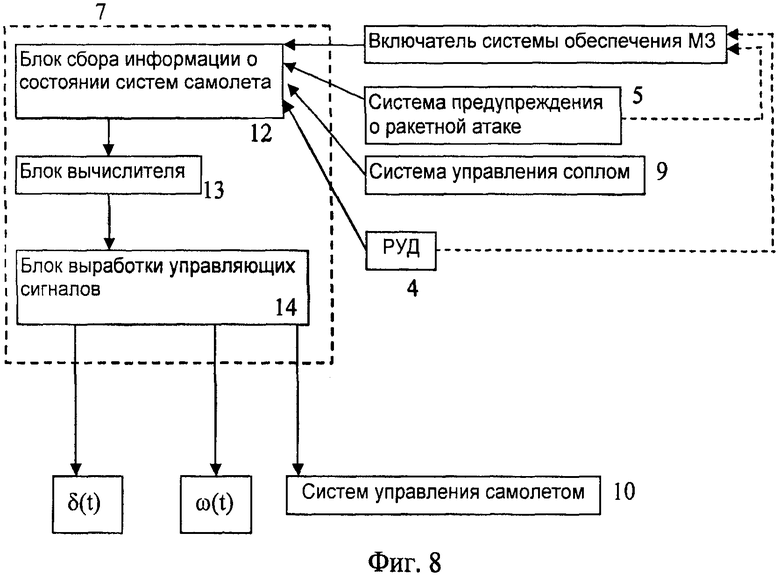
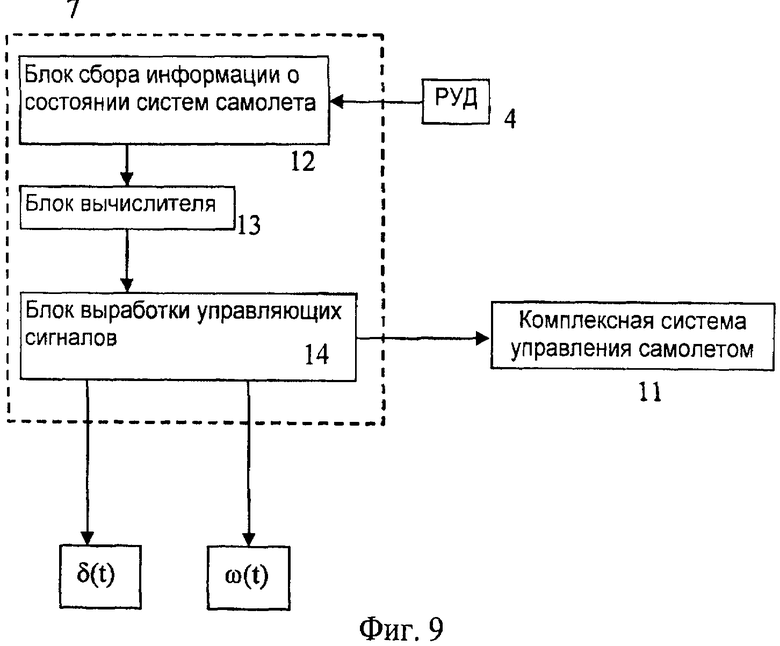
на фиг.8 показан возможный вариант блок-схемы системы 7 обеспечения МЗ и ее взаимодействия с другими системами; на фиг.9 показан возможный вариант взаимодействия системы 7 с комплексной системой 11 управления самолетом.
При отклонении сопла 3 изменяется ориентация индикатрисы ИК-излучения и примерно в половине квадрантов задней полусферы существенно уменьшается уровень энергии, излучаемой нагретыми внутренними элементами двигателя 2, т.е. на ИК-приемники теплового излучения, которые могут находиться в этой части пространства (например, на противосамолетных ракетах), будет попадать существенно меньшая энергия, что в свою очередь способствует повышению эффективности источников помех и ложных тепловых целей (ЛТЦ), а следовательно, и снижению заметности двигателя. Одновременно, благодаря экранированию уменьшается заметность внутренней полости двигателя и в РЛ диапазоне. Известно (см., например, журнал "Aviation Week & Space Technology, v.154, n.6, February 5, 2001"), что заметность объекта или площадь его радиолокационного сечения зависит от ракурса наблюдения. При отклонении сопла меняется в пространстве ракурс наблюдения его поверхностей и кромок, следовательно, в части пространства уменьшается РЛ заметность этих элементов двигателя.
Для повышения эффективности способа предусматривается возможность изменения угла отклонения δ по какому-либо закону во времени, то есть δ=δ(t). В случае если на двигателе 2 обеспечивается так называемое всеракурсное отклонение сопла 3, то есть поворот относительно любой оси 6, лежащей в плоскости YZ и составляющей с осью Z произвольный угол ω в диапазоне от 0 до 90°, в предлагаемом способе предусматривается возможность изменения угла ω по какому-либо закону во времени, то есть ω=ω(t), причем изменение углов δ и ω может происходить либо независимо друг от друга либо между ними может быть запрограммированная связь.
Поскольку при отклонении сопла возникает поперечная составляющая реактивной тяги, для парирования возникающего момента и обеспечения установившегося (например, горизонтального) полета одновременно с соплом 3 отклоняются органы аэродинамического управления самолетом.
Согласованность отклонения сопла и органов управления самолетом может обеспечиваться по трем вариантам:
1) включение системы 7 обеспечения малой заметности (МЗ) с использованием отклонения сопла производит летчик с помощью включателя 8; 2) система 7 включается по сигналу системы 5 предупреждения о ракетной атаке; 3) включение системы 7 происходит в зависимости от положения РУД.
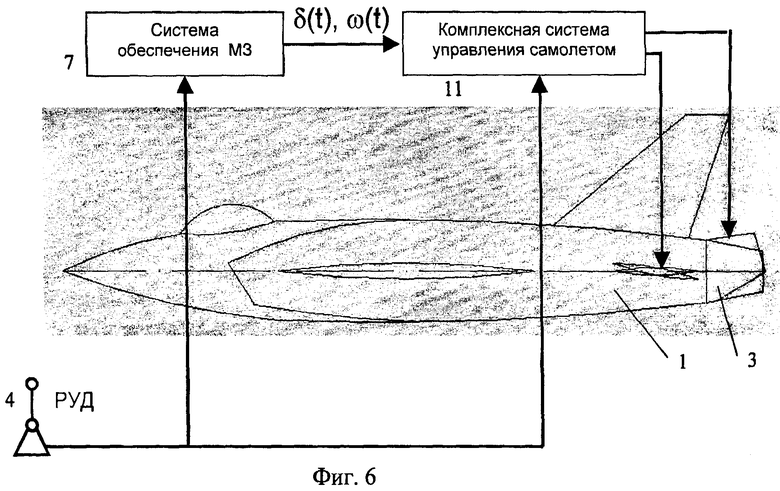
Сигнал от системы 7, соответствующий выбранному закону отклонения сопла, передается либо параллельно в систему 9 управления поворотным соплом 3 и систему 10 управления самолетом либо в комплексную систему 11 управления самолетом, которая выдает управляющие сигналы на отклонение сопла и органов аэродинамического управления самолетом.
Система 7 обеспечения МЗ может включать следующие элементы (фиг.8): блок 12 сбора информации о состоянии систем самолета, выход которого соединен со входом блока 13 вычислителя. Выход блока 13 вычислителя соединен со входом блока 14 выработки управляющих сигналов. На вход блока 12 сбора информации поступают, в частности, следующие сигналы: от включателя 8 системы 7 обеспечения МЗ; от системы 5 предупреждения о ракетной атаке; от системы 9 управления соплом, информация о положении РУД.
Система 7 обеспечения МЗ вместо использования автономного вычислителя может, например, обслуживаться бортовым компьютером, который обобщает сигналы (исходные данные), необходимые для реализации всех мероприятий, обеспечивающих заявляемый эффект: сигнал (команду) о включении системы; сигнал, свидетельствующий о переходе двигателя на бесфорсажный режим работы; сигнал о переходе системы управления соплом на закон, заложенный применительно к режиму МЗ; сигнал о переходе системы управления самолетом на режим, соответствующий режиму МЗ в установившемся полете.
Осуществление способа происходит следующим образом.
При необходимости снижения уровня демаскирующих признаков (заметности) реактивного двигателя 1, размещенного на летательном аппарате 2 и оснащенного многорежимным поворотным соплом 3, двигатель переводят на бесфорсажный режим работы и одновременно отклоняют сопло на угол δ. На фиг.1 показано сопло, которое может поворачиваться вокруг некоторой оси 6, наклоненной под углом ω относительно оси Z самолетной системы координат. Индикатриса ИК-излучения сопла также отклоняется и для варианта отклонения, показанного на фиг.2 (сопло отклонено вверх), в направлении нижних квадрантов энергия излучения существенно уменьшается: например, для индикатрисы, показанной на фиг.3, излучение вдоль некоторого луча 15 уменьшается почти в 2 раза.
Направление, в котором происходит отклонение сопла, выбирают в зависимости от желательной зоны экранирования нагретых внутренних полостей двигателя, которая в свою очередь определяется направлением возможной атаки со стороны ракет с ИК наведением.
Обычно углам отклонения сопла присваивают знак в зависимости от направления поперечной составляющей реактивной тяги: если эта составляющая направлена вверх (т.е. в сторону положительного направления оси Y самолетной системы координат), угол отклонения считают положительным, в противном случае - отрицательным. Поэтому в соответствии с предлагаемым способом угол δ может изменяться в диапазоне от максимального положительного до максимального отрицательного значения, причем возможно отклонение как на постоянный во времени (например, максимальный) угол, то есть δ=δ(t)=const, так и на угол, меняющийся по какому-либо закону во времени, то есть δ=δ(t)=var.
В случае оснащения двигателя соплом, которое обеспечивает так называемое всеракурсное отклонение, то есть поворот, например, сверхзвуковой части сопла относительно любой оси, лежащей в плоскости YZ и составляющей с осью Z произвольный угол ω в диапазоне от 0 до 90°, в предлагаемом способе предусматривается возможность изменения угла ω по какому-либо закону во времени, то есть ω=ω(t), причем изменение углов δ и ω может происходить либо независимо друг от друга либо между ними может быть некоторая запрограммированная связь. Такое отклонение сопла позволяет создать имитацию движения ЛТЦ, что затрудняет распознавание сопла двигателя на их фоне, и снижает точность наведения ракет с ИК-приемниками.
Благодаря отклонению сопла происходит частичное экранирование внутренней полости двигателя от внешнего РЛ облучения и одновременно меняется в пространстве ракурс наблюдения его поверхностей и кромок, что способствует снижению РЛ заметности этих элементов двигателя.
При отклонении сопла возникает поперечная составляющая реактивной тяги, создающая момент относительно центра тяжести самолета. Для парирования возникающего момента и обеспечения установившегося (например, горизонтального) полета одновременно с соплом отклоняют соответствующие органы аэродинамического управления самолетом - рули высоты (стабилизаторы ЦПГО), рули направления, элероны или флаппероны.
Современные системы управления самолетом позволяют реализовать различные варианты согласованного отклонения сопла и органов управления самолетом для обеспечения аэродинамической балансировки. Согласно предлагаемому способу подачу сигнала в систему 7 обеспечения МЗ самолета и ее взаимодействие с системой управления самолетом можно осуществлять по трем вариантам.
В первом варианте включение системы 7 обеспечения МЗ производит летчик с помощью включателя 8. Одновременно (или заранее) летчик переводит РУД в положение, соответствующее бесфорсажному режиму работы двигателя. Сигнал от системы 7 обеспечения МЗ, соответствующий заложенному в нее закону отклонения сопла, передается в систему 9 управления поворотным соплом и систему 10 управления самолетом, которая выдает управляющие сигналы на отклонение органов аэродинамического управления самолетом.
Во втором варианте включение системы 7 производится по сигналу системы 5 предупреждения о ракетной атаке при условии, что положение РУД соответствует бесфорсажному режиму работы двигателя. Сигнал от системы 7 обеспечения МЗ, соответствующий заложенному в нее закону отклонения сопла, передается в комплексную систему 11 управления самолетом, которая управляет и соплом и органами аэродинамического управления самолетом.
В третьем варианте включение системы 7 производится в соответствии с положением РУД, которое соответствует режиму МЗ-бесфорсажный режим с подачей сигнала на отклонение сопла по заложенному в систему закону. Сигнал от системы 7, соответствующий заложенному в нее закону отклонения сопла, передается в комплексную систему 11 управления самолетом, которая управляет и соплом и органами аэродинамического управления самолетом.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМОЕ ПЛОСКОЕ СОПЛО ДЛЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2001 |
|
RU2193680C2 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ С УЧЕТОМ СТАБИЛИЗАЦИИ ЗАДАННОЙ СКОРОСТИ ПОЛЕТА | 2010 |
|
RU2455201C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРОГНОЗА ВЕКТОРА СКОРОСТИ ПОЛЕТА | 2010 |
|
RU2466911C2 |
| СПОСОБ НЕПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ НЕЛИНЕЙНЫХ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА ПО РЕЗУЛЬТАТАМ ЛЁТНЫХ ИССЛЕДОВАНИЙ | 2014 |
|
RU2560244C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2009 |
|
RU2442001C2 |
| ВЫХЛОПНОЕ СОПЛО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2668309C1 |
| САМОЛЕТ ИНТЕГРАЛЬНОЙ АЭРОДИНАМИЧЕСКОЙ КОМПОНОВКИ | 2010 |
|
RU2440916C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2536838C2 |
| ВЫХОДНОЕ ДВУХМЕРНОЕ СОПЛО ДЛЯ ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ | 2002 |
|
RU2232281C1 |
Изобретение относится к средствам снижения уровня заметности летательного аппарата, в частности его силовой установки в радиолокационном или инфракрасном диапазоне длин волн. В первом варианте способ снижения демаскирующих признаков (заметности) реактивного двигателя, размещенного на летательном аппарате и оснащенного поворотным соплом, включает экранирование внутренних элементов двигателя путем отклонения сопла при бесфорсажном режиме работы двигателя на фиксированный угол, удержание сопла в отклоненном положении, при этом одновременно с отклонением сопла отклоняют органы управления летательным аппаратом, обеспечивая балансировку летательного аппарата в установившемся полете. Второй способ снижения демаскирующих признаков реактивного двигателя включает экранирование внутренних элементов путем совершения соплом колебательных движений на угол δ при бесфорсажном режиме работы двигателя, при этом одновременно с колебательным движением сопла осуществляют отклонение органов управления летательным аппаратом для обеспечения аэродинамической балансировки летательного аппарата в установившемся полете. Включение режима малой заметности может производиться летчиком или по сигналу системы предупреждения о ракетной атаке при положении ручки управления двигателем в бесфорсажном положении. 2 н. 9 з.п. ф-лы, 8 ил.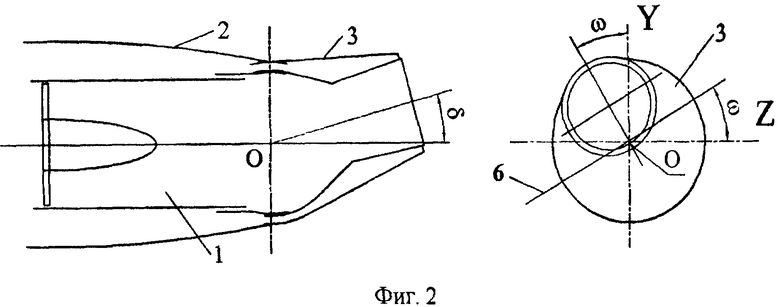
1. Способ снижения уровня демаскирующих признаков реактивного двигателя, размещенного на летательном аппарате и оснащенного поворотным соплом, при котором осуществляют экранирование нагретых внутренних элементов двигателя, отличающийся тем, что экранирование осуществляют путем отклонения сопла при бесфорсажном режиме работы двигателя на фиксированный угол и удержания его в этом положении, при этом одновременно с отклонением сопла осуществляют отклонение органов управления летательным аппаратом для обеспечения аэродинамической балансировки летательного аппарата в установившемся полете.
2. Способ по п.1, отличающийся тем, что включение режима снижения уровня демаскирующих признаков с использованием отклонения сопла производит летчик, который одновременно или заранее переводит ручку управления двигателем в положение, соответствующее бесфорсажному режиму работы двигателя.
3. Способ по п.1, отличающийся тем, что включение режима снижения уровня демаскирующих признаков производится по сигналу системы предупреждения о ракетной атаке при условии, что положение ручки управления двигателем соответствует бесфорсажному режиму работы двигателя.
4. Способ по п.1, отличающийся тем, что включение режима снижения уровня демаскирующих признаков производится в соответствии с положением ручки управления двигателем, которое соответствует режиму малой заметности (МЗ) - бесфорсажному режиму с подачей сигнала на отклонение сопла по заложенному в систему закону.
5. Способ снижения уровня демаскирующих признаков реактивного двигателя, размещенного на летательном аппарате и оснащенного поворотным соплом, при котором осуществляют экранирование нагретых внутренних элементов двигателя, отличающийся тем, что экранирование осуществляют путем совершения соплом колебательных движений на угол δ при бесфорсажном режиме работы двигателя, при этом одновременно с колебательными движениями сопла осуществляют отклонение органов управления летательным аппаратом для обеспечения аэродинамической балансировки летательного аппарата в установившемся полете.
6. Способ по п.5, отличающийся тем, что угол отклонения сопла при совершении им колебательных движений δ изменяют во времени по периодическому закону, определяемому соотношением:

где αk, bk - амплитуды колебаний сопла на k-й гармонике, fk - частота k-й гармоники колебаний сопла, t - время, N - количество гармоник колебаний сопла.
7. Способ по п.5, отличающийся тем, что при оснащении двигателя соплом с возможностью всеракурсного отклонения угол наклона оси ω, вокруг которой поворачивается сопло, изменяют во времени по квазипериодическому закону, определяемому соотношением:

где ck, dk - амплитуды изменений (колебаний) угла наклона оси, вокруг которой поворачивается сопло на k-й гармонике, lk - частота k-й гармоники изменений (колебаний) угла ω наклона оси, вокруг которой поворачивается сопло, t - время, N - количество гармоник колебаний угла ω наклона оси, ω0 - начальное значение угла ω наклона оси, вокруг которой поворачивается сопло, ω' - средняя за период скорость колебания угла ω наклона оси, вокруг которой поворачивается сопло.
8. Способ по п.6 или 7, отличающийся тем, что углы δ и ω находятся в зависимости, определяемой соотношением:

где αk, bk - амплитуды колебаний сопла на k-й гармонике, vk - частота k-й гармоники колебаний сопла, N - количество гармоник колебаний сопла, ω=ω0+ω't, ω0 - начальное значение угла ω наклона оси, вокруг которой поворачивается сопло, ω' - средняя за период скорость колебания угла ω наклона оси, вокруг которой поворачивается сопло.
9. Способ по п.5, отличающийся тем, что включение режима снижения уровня демаскирующих признаков с использованием отклонения сопла производит летчик, который одновременно или заранее переводит ручку управления двигателем в положение, соответствующее бесфорсажному режиму работы двигателя.
10. Способ по п.5, отличающийся тем, что включение режима снижения уровня демаскирующих признаков производится по сигналу системы предупреждения о ракетной атаке при условии, что положение ручки управления двигателем соответствует бесфорсажному режиму работы двигателя.
11. Способ по п.5, отличающийся тем, что включение режима снижения уровня демаскирующих признаков производится в соответствии с положением ручки управления двигателем, которое соответствует режиму МЗ - бесфорсажному режиму с подачей сигнала на отклонение сопла по заложенному в систему закону.
| КОМБИНИРОВАННЫЙ СПОСОБ УМЕНЬШЕНИЯ ЗАМЕТНОСТИ СИЛОВОЙ УСТАНОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА В РАДИОЛОКАЦИОННОМ, ИНФРАКРАСНОМ, АКУСТИЧЕСКОМ ДИАПАЗОНАХ ДЛИН ВОЛН С ОБЕСПЕЧЕНИЕМ ИЗМЕНЕНИЯ ВЕКТОРА ЕЕ ТЯГИ | 2003 |
|
RU2215669C1 |
| Способ получения сырьевой смеси для гипсоволокнистых стеновых панелей | 1982 |
|
SU1077871A1 |
| US 20080236138 A1, 02.10.2008 | |||
| US 6857600 B1, 22.02.2005. | |||

