Изобретение относится к области радиолокации, в частности к способам обнаружения объектов и определения параметров траектории их движения, и может быть использовано при построении радиолокационных станций (РЛС), осуществляющих последовательный круговой или секторный обзор пространства по жесткой программе за счет сканирования диаграммой направленности антенны.
Известен комплексный способ определения координат и параметров траектории движения авиационно-космических объектов, наблюдаемых группировкой станций слежения [1].
Недостатком данного способа-аналога является, во-первых, необходимость наличия группировки станций слежения и межстанционных дуплексных каналов информационной связи, во-вторых, сложность синхронизации группировки станций при необходимости обзора пространства.
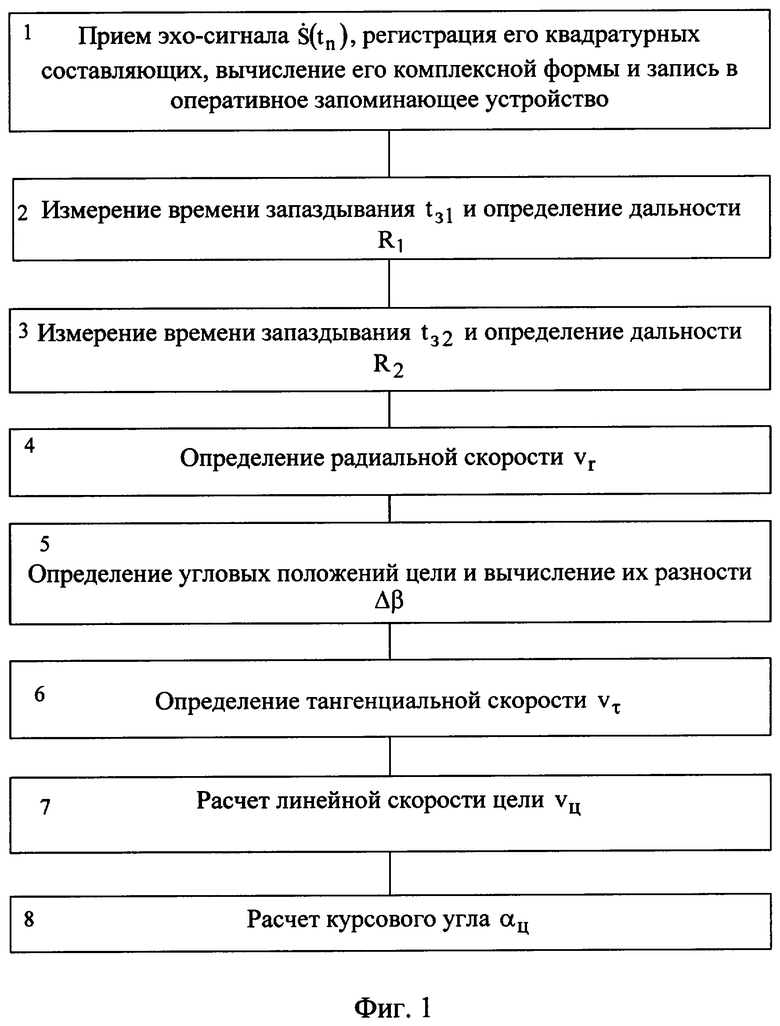
Наиболее близким к предлагаемому изобретению (прототипом) является способ определения параметров траектории движения воздушных целей в обзорных РЛС [2, с.303], основанный на выполнении следующих операций (фиг.1):
1. Прием сигнала от цели в процессе обзора пространства РЛС:

где G(βц-β(tn)) - текущее значение диаграммы направленности антенны (ДНА) в направлении на цель; βц - азимут цели; β(tн)=2π(1-nTИ/Тобз); vτ - тангенциальная скорость перемещения цели; vr - радиальная скорость перемещения цели; rk=kΔr - дальность до цели, находящейся в k-м  элементе разрешения по дальности Δr, и состоящей из
элементе разрешения по дальности Δr, и состоящей из  локальных центров рассеяния (ЛЦР);
локальных центров рассеяния (ЛЦР);  - аддитивная смесь шума на входе аналого-цифрового преобразователя (АЦП) и шумов дискретизации и квантования принятого сигнала; tn=nTИ; n - номер зондирующего сигнала; ТИ - период следования импульсов;
- аддитивная смесь шума на входе аналого-цифрового преобразователя (АЦП) и шумов дискретизации и квантования принятого сигнала; tn=nTИ; n - номер зондирующего сигнала; ТИ - период следования импульсов;  ;
;  ; int{·} - символ вычисления целого значения от выражения {·}; Ψi - фаза переотражения; Тобз - период обзора пространства РЛС, регистрация его квадратурных составляющих, вычисление его комплексной формы и запись в оперативное запоминающее устройство.
; int{·} - символ вычисления целого значения от выражения {·}; Ψi - фаза переотражения; Тобз - период обзора пространства РЛС, регистрация его квадратурных составляющих, вычисление его комплексной формы и запись в оперативное запоминающее устройство.
2. Измерение времени запаздывания tз1 эхо-сигнала (1) и определение расстояния до цели при первом обзоре пространства по формуле:

где с - скорость света.
3. Определение дальности до цели при втором обзоре пространства R2 и расчет радиальной скорости цели по формуле:

4. Вычисление значения Δβ, которое определяет разность двух угловых положений цели при втором β2 и первом β1 обзоре пространства по формуле:

5. Определение тангенциальной скорости vτ цели по вычисленным величинам Δβ, tз1 и tз2 (из теоремы косинусов):

6. Расчет линейной скорости цели по формуле:

7. Расчет курсового угла цели по формуле:
При этом точность определения радиальной скорости движения цели способом-прототипом определяется следующим выражением [3. с.278]
где  ; τи - длительность простого радиоимпульса; q - отношение сигнал/шум в приемном устройстве РЛС.
; τи - длительность простого радиоимпульса; q - отношение сигнал/шум в приемном устройстве РЛС.
Для траектории цели, движущейся с ускорением при m равнодискретных и равноточных измерениях, точность оценки тангенциальной скорости движения цели можно определить, используя методику, изложенную в [3, с.268-278]

Анализ выражений (10-11) показывает, что для получения приемлемой точности оценивания параметров линейной траектории движения воздушной цели (радиальной и тангенциальной скорости) необходимо обработать не менее пяти-шести измерений дальности.
К недостаткам способа-прототипа относятся:
- большое время, затрачиваемое на оценку параметров траектории движения цели;
- низкая точность определения параметров траектории движения цели при малом количестве обзоров пространства.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение точности определения параметров траектории движения цели при фиксированном времени наблюдения воздушных целей и уменьшение времени наблюдения при заданной точности оценки параметров движения цели.
Указанный технический результат достигается тем, что в известном способе определения параметров траектории движения воздушных целей в обзорных радиолокационных станциях, заключающемся в излучении зондирующего сигнала и приеме эхо-сигнала от цели в процессе обзора пространства, регистрации квадратурных составляющих принятого эхо-сигнала, вычислении его комплексной формы и записи в оперативное запоминающее устройство, определении дальности до цели при каждом обзоре пространства, определении углового положения цели, расчете линейной скорости vц и курсового угла цели, что формируют N матриц опорных сигналов размером Р×L, элементы которых определяют по формуле:

где  - номер отсчета дискретного опорного сигнала; N - количество принимаемых в процессе обзора комплексных эхо-сигналов;
- номер отсчета дискретного опорного сигнала; N - количество принимаемых в процессе обзора комплексных эхо-сигналов;  и
и  - значения расчетных радиальной и тангенциальной составляющих скорости цели vц;
- значения расчетных радиальной и тангенциальной составляющих скорости цели vц;  - знак множества; Δvr и Δvτ - шаги дискретизации скоростей
- знак множества; Δvr и Δvτ - шаги дискретизации скоростей  и
и  соответственно;
соответственно;  и L=vr max/Δvr - номер и максимальное количество расчетных значений скорости соответственно;
и L=vr max/Δvr - номер и максимальное количество расчетных значений скорости соответственно;  и P=vτ max/Δvτ - номер и максимальное количество расчетных значений скорости
и P=vτ max/Δvτ - номер и максимальное количество расчетных значений скорости  соответственно; vr max и vτ max - максимальные значения скоростей vr и vτ соответственно; R1 - расстояние до цели при первом обзоре пространства; λ - длина волны зондирующих сигналов; ТИ - период следования зондирующих сигналов; π=3,1416...; умножают каждый элемент n-й матрицы на принимаемый в процессе обзора соответствующий комплексный эхо-сигнал, формируют матрицу результирующих сигналов путем суммирования одноименных элементов матриц опорных сигналов по n, вычисляют квадрат модуля каждого элемента матрицы результирующего сигнала, определяют номер строки p0 и столбца l0 матрицы, при которых достигается максимум результирующего сигнала, рассчитывают радиальные и тангенциальные скорости цели по формулам: vr=Δvrр0 и vτ=Δvτl0 соответственно.
соответственно; vr max и vτ max - максимальные значения скоростей vr и vτ соответственно; R1 - расстояние до цели при первом обзоре пространства; λ - длина волны зондирующих сигналов; ТИ - период следования зондирующих сигналов; π=3,1416...; умножают каждый элемент n-й матрицы на принимаемый в процессе обзора соответствующий комплексный эхо-сигнал, формируют матрицу результирующих сигналов путем суммирования одноименных элементов матриц опорных сигналов по n, вычисляют квадрат модуля каждого элемента матрицы результирующего сигнала, определяют номер строки p0 и столбца l0 матрицы, при которых достигается максимум результирующего сигнала, рассчитывают радиальные и тангенциальные скорости цели по формулам: vr=Δvrр0 и vτ=Δvτl0 соответственно.
Предлагаемый способ позволяет определять параметры траектории движения воздушных целей за один обзор пространства путем когерентного накопления отраженных от цели эхо-сигналов и специальной обработке этих сигналов [4, 5].
В предлагаемом способе определения параметров траектории движения цели в обзорных РЛС выполняется следующая последовательность операций (фиг.2):
1. Прием сигнала от цели (1) в процессе обзора пространства РЛС.
2. Измерение времени запаздывания tзn и определение расстояния до цели при импульсном зондирующим сигнале по формуле (2).
3. Регистрация квадратурных составляющих эхо-сигнала (1), вычисление его комплексной формы и запись в оперативное запоминающее устройство.
4. Формирование N матриц опорных сигналов размером Р×L (10).
5. Умножение n-го принятого сигнала  на каждый элемент соответствующей матрицы опорных сигналов
на каждый элемент соответствующей матрицы опорных сигналов  .
.
6. Формирование матрицы результирующих сигналов путем суммирования одноименных элементов матриц опорных сигналов по n по формуле:
7. Вычисление квадрата модуля результирующего сигнала по формуле:

8. Определение номеров строк p0 и столбцов l0 матрицы опорных сигналов, при которых достигается максимум результирующих сигналов max U(p,l)
p, l.
9. Расчет радиальной скорости цели по формуле:

10. Расчет тангенциальной скорости цели по формуле:

11. Расчет линейной скорости цели по формуле (7).
12. Расчет курсового угла цели по формуле (8).
Таким образом, в предлагаемом способе определения параметров траектории движения воздушных целей в обзорных РЛС новыми существенными признаками изобретения являются:
1. Формирование N матриц опорных сигналов  размером Р×L.
размером Р×L.
2. Умножение принятого эхо-сигнала  на матрицу опорных сигналов .
на матрицу опорных сигналов .
3. Формирование матрицы результирующих сигналов путем суммирования одноименных элементов матриц опорных сигналов по n.
4. Определение квадрата модуля результирующего сигнала U(p,l).
5. Определение номеров строк p0 и столбцов l0 матрицы опорных сигналов, при которых достигается максимум результирующих сигналов max U(p,l)
p, l.
6. Оценка радиальной скорости  по формуле
по формуле 
7. Оценка тангенциальной скорости  по формуле
по формуле 
При этом точность оценки параметров движения цели предлагаемым способом определяется как:
1. Точность оценки радиальной скорости цели  определяется известным соотношением:
определяется известным соотношением:

где σfд=l/(2πTнq) - среднее квадратическое отклонение оценки по максимуму правдоподобия частоты Доплера сигнала;  - время нахождения цели в диаграмме направленности антенны (ДНА) (время инверсного синтезирования апертуры антенны); β0,5 - ширина ДНА по азимуту.
- время нахождения цели в диаграмме направленности антенны (ДНА) (время инверсного синтезирования апертуры антенны); β0,5 - ширина ДНА по азимуту.
2. Точность оценки тангенциальной скорости цели  определяется по методике, изложенной в [5, с.184-195], следующим образом.
определяется по методике, изложенной в [5, с.184-195], следующим образом.
Если форма ДНА G(tn) имеет следующий вид
то функция неопределенности (11) при фиксированных значениях р и l принимает вид

где 
Положим, что период обзора пространства Тобз, ТИ и β0,5 постоянные, тогда число N=const, т.е. функция неопределенности (17) зависит только от тангенциальной скорости цели vτ. Это позволяет применить известный методический аппарат [6, с.209-215] для определения потенциальной точности оценки скорости цели 
Получим вторую производную от функции (17) по vτ и определим ее значение при vτ=0:

Тогда получим выражение дисперсии оценки тангенциальной скорости vτ
и выражение для среднего квадратичного отклонения (СКО) потенциальной точности оценки тангенциальной скорости vτ
Результаты сравнительного анализа точностей оценки  и
и  способом-прототипом и предлагаемым способом представлены в табл.1.
способом-прототипом и предлагаемым способом представлены в табл.1.

Таким образом, как видно из таблицы 1, для достижения одинаковой точности определения тангенциальной скорости движения цели в способе-прототипе и предлагаемом способе необходимо в способе-прототипе выполнить 12 обзоров пространства, а для достижения одинаковой точности определения радиальной скорости движения цели необходимо в способе-прототипе выполнить 46 обзоров пространства. Следовательно, выигрыш по времени, возникающий в результате применения предлагаемого способа составляет 12 и 46 раз и не зависит от скорости обзора пространства.
Следовательно, введение новых существенных признаков позволяет в обзорных РЛС повысить точность определения параметров движения цели при фиксированном времени наблюдения воздушных целей или уменьшить время наблюдения при заданной точности оценки параметров движения цели.
Сущность изобретения поясняется фиг.1-3.
На фиг.1 представлена совокупность операций, составляющих сущность способа-прототипа.
На фиг.2 представлена совокупность операций, составляющих сущность предлагаемого способа, где обозначено:
известные операции: 1, 2, 10, 11;
вновь введенные операции: 3-9.
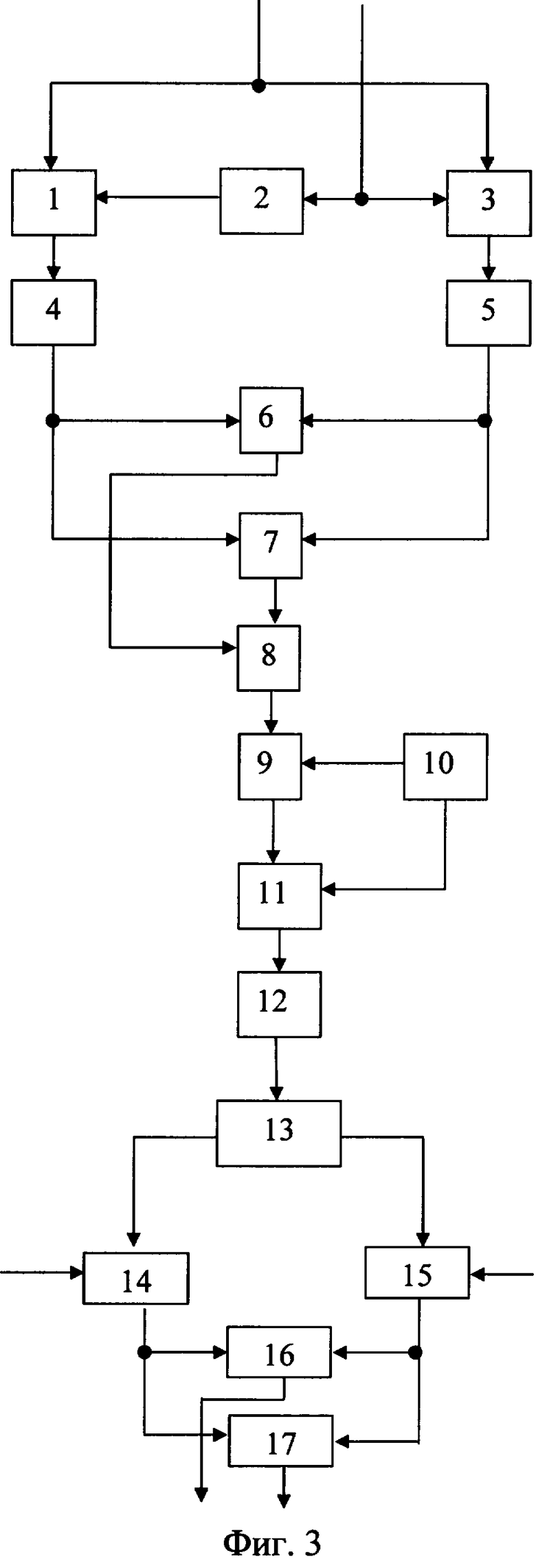
На фиг.3 представлен вариант построения устройства, реализующего предлагаемый способ, где обозначено:
1. Фазовый детектор.
2. Фазовращатель.
3. Фазовый детектор.
4. Аналого-цифровой преобразователь.
5. Аналого-цифровой преобразователь.
6. Вычислитель модуля комплексного числа.
7. Вычислитель аргумента комплексного числа.
8. Умножитель модуля комплексного числа на его аргумент.
9. Умножитель комплексных чисел.
10. Формирователь N матриц опорных сигналов.
11. Сумматор комплексных чисел.
12. Устройство вычисления квадрата модуля комплексного числа.
13. Устройство поиска номеров строк и столбцов матрицы, при которых достигается максимум ее элементов.
14. Умножитель скалярных чисел.
15. Умножитель скалярных чисел.
16. Вычислитель корня квадратного из суммы квадратов.
17. Вычислитель арктангенса частного двух скалярных чисел.
Конструкция предлагаемого устройства основана на использовании известных аналоговых и цифровых элементов и технических трудностей в реализации не представляет.
Согласно фиг.3 (нумерация произведена в соответствии с вышеприведенным их перечислением) весь процесс определения параметров траектории движения воздушных целей в обзорных РЛС разбит на следующие основные этапы:
1. Преобразование принятого в квадратурных каналах действительных сигналов в комплексный сигнал (1).
2. Измерение времени запаздывания tз и оценка дальности R1.
3. Умножение принятого эхо-сигнала  на матрицу опорных сигналов
на матрицу опорных сигналов  (10).
(10).
4. Формирование матрицы результирующих сигналов (11) путем суммирования одноименных элементов матриц опорных сигналов по n.
5. Вычисление квадрата модуля результирующего сигнала (12).
6. Определение номеров строк p0 и столбцов l0 матрицы опорных сигналов, при которых достигается максимум результирующих сигналов.
7. Расчет радиальной скорости по формуле  .
.
8. Расчет тангенциальной скорости по формуле 
9. Расчет линейной скорости vц и курсового угла αц цели.
Оценка реализуемости и эффективности предлагаемого способа проводилась методом математического моделирования на ЭВМ. Операция 1, 2, 10, 11 известны, их реализация аналогична прототипу, а остальные операции можно реализовать аппаратно или программно, например в МАТЛАБЕ.
Источники информации
1. Мамошин В.Р. Патентный РФ №2279105 от 02.08.2004 г. на изобретение "Комплексный способ определения координат и параметров траекторного движения авиационно-космических объектов, наблюдаемых группировкой станций слежения" БИ №18 от 27.06.2006 г.
2. Бакулев П.А. // Радиолокационные системы. Учебник для вузов. - М.: Радиотехника, 2004, 320 с.
3. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации: Учеб. пособие для вузов. - М.: Радио и связь, 1992. - 304 с.
4. Митрофанов Д.Г. // Радиолокационная станция с инверсным синтезированием апертуры. Патент на изобретение №2129286. - 1992.
5. Гришин Ю.П., Ипатов В.П., Казаринов Ю.М. и др. // Радиотехнические системы. 1990. - 496 с.
6. Перов А.И. // Статистическая теория радиотехнических систем. - М.: Радиотехника, 2003. - 400 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ В ОБЗОРНЫХ РАДИОЛОКАТОРАХ ЗА СЧЕТ ИСПОЛЬЗОВАНИЯ КОГЕРЕНТНЫХ СВОЙСТВ ОТРАЖЕННЫХ СИГНАЛОВ | 2009 |
|
RU2416105C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2466423C2 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2427002C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2489753C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ И РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В РЛС С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2016 |
|
RU2635366C1 |
| Способ обнаружения маневрирующих малоразмерных воздушных объектов с использованием параметрических преобразований и устройство для его реализации | 2023 |
|
RU2806448C1 |
| СПОСОБ КОМПЛЕКСНОГО ВЕДЕНИЯ РАДИОЛОКАЦИОННОЙ РАЗВЕДКИ СРЕДСТВАМИ АКТИВНОЙ, ПАССИВНОЙ И АКТИВНО-ПАССИВНОЙ ЛОКАЦИИ В ЕДИНОМ РАДИОЛОКАЦИОННОМ ПОЛЕ | 2024 |
|
RU2831131C1 |

Изобретение относится к области радиолокации, в частности к способам обнаружения объектов и определения параметров траектории их движения. Достигаемым техническим результатом изобретения является повышение точности определения параметров траектории движения цели при фиксированном времени наблюдения воздушных целей и уменьшение времени наблюдения при заданной точности оценки параметров движения цели. Указанный результат достигается за счет того, что при определении параметров траектории движения воздушных целей в обзорных РЛС формируют N матриц опорных сигналов размером P×L, умножают каждый элемент n-й матрицы на принимаемый в процессе обзора соответствующий комплексный эхо-сигнал, формируют матрицу результирующих сигналов путем суммирования одноименных элементов матриц опорных сигналов по n, вычисляют квадрат модуля каждого элемента матрицы результирующего сигнала, определяют номер строки р0 и столбца l0 матрицы, при которых достигается максимум результирующего сигнала, рассчитывают радиальные и тангенциальные скорости цели по соответствующим формулам. 3 ил., 1 табл.
Способ определения параметров траектории движения воздушных целей в обзорных радиолокационных станциях, заключающийся в излучении зондирующего сигнала и приеме эхо-сигнала от цели в процессе обзора пространства, регистрации квадратурных составляющих принятого эхо-сигнала, вычислении его комплексной формы и записи в оперативное запоминающее устройство, определении дальности до цели при каждом обзоре пространства, определении углового положения цели, расчете линейной скорости vц и курсового угла цели, отличающийся тем, что формируют N матриц опорных сигналов размером P×L, элементы которых определяют по формуле

где  , n - номер отсчета дискретного опорного сигнала; N - количество принимаемых в процессе обзора комплексных эхо-сигналов;
, n - номер отсчета дискретного опорного сигнала; N - количество принимаемых в процессе обзора комплексных эхо-сигналов;  и
и  - значения расчетных радиальной и тангенциальной составляющих скорости цели vц;
- значения расчетных радиальной и тангенциальной составляющих скорости цели vц;  - знак множества; Δvr и Δvτ - шаги дискретизации скоростей
- знак множества; Δvr и Δvτ - шаги дискретизации скоростей  и
и  соответственно;
соответственно;  и L=vr max/Δvr - номер и максимальное количество расчетных значений скорости соответственно;
и L=vr max/Δvr - номер и максимальное количество расчетных значений скорости соответственно;  и Р=vτ max/Δvτ - номер и максимальное количество расчетных значений скорости соответственно; vr max и vτ max - максимальные значения скоростей vr и vτ соответственно; R1 - расстояние до цели при первом обзоре пространства; λ - длина волны зондирующих сигналов; ТИ - период следования зондирующих сигналов; π=3,1416...;
и Р=vτ max/Δvτ - номер и максимальное количество расчетных значений скорости соответственно; vr max и vτ max - максимальные значения скоростей vr и vτ соответственно; R1 - расстояние до цели при первом обзоре пространства; λ - длина волны зондирующих сигналов; ТИ - период следования зондирующих сигналов; π=3,1416...;
умножают каждый элемент n-й матрицы на принимаемый в процессе обзора соответствующий комплексный эхо-сигнал, формируют матрицу результирующих сигналов путем суммирования одноименных элементов матриц опорных сигналов по n, вычисляют квадрат модуля каждого элемента матрицы результирующего сигнала, определяют номер строки р0 и столбца l0 матрицы, при которых достигается максимум результирующего сигнала, рассчитывают радиальные и тангенциальные скорости цели по формулам vr=Δvrp0 и vτ=Δvτl0 соответственно.
| БАКУЛЕВ П.А | |||
| Радиолокационные системы | |||
| - М.: Радиотехника, 2004, с.203 | |||
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| КОМПЛЕКСНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ АВИАЦИОННО-КОСМИЧЕСКИХ ОБЪЕКТОВ, НАБЛЮДАЕМЫХ ГРУППИРОВКОЙ СТАНЦИЙ СЛЕЖЕНИЯ | 2004 |
|
RU2279105C2 |
| US 2007008213 А1, 11.01.2007 | |||
| US 2005264438 А1, 21.09.2005 | |||
| US 5220328 A, 15.06.1993. | |||

