Изобретение относится к области сельскохозяйственного и тракторного машиностроения и может быть использовано для агрегатирования с сельскохозяйственными машинами, имеющими рабочие органы с приводом от независимых валов отбора мощности, а также режущих рабочих органов послойной работы, например почвообрабатывающих, меняющих толщину обработки продукционного слоя почвы.
Известно устройство привода независимого вала отбора мощности транспортного средства (авт. св. №747746, МПК 5 В60К 17/28), принятое за прототип.
Данное изобретение, оборудованное гидрообъемной передачей с органом управления, содержащее приводимый от двигателя транспортного средства гидронасос, гидравлически связанный с гидромотором, и механизм соединения вала отбора мощности с валом гидромотора. Дополнительно оно снабжено устройством для автоматического поддержания заданной частоты вращения независимого вала отбора мощности, выполненного в виде центробежного датчика, приводимого во вращение от вала гидромотора, и гидравлического поршневого сервомотора, полости которого сообщены с источником давления рабочей жидкости и гидробаком посредством управляемого распределителя. Причем шток поршня упомянутого сервомотора снабжен двуплечим рычагом, одно плечо которого связано с органом управления гидрообъемной передачи, а другое плечо - с рычагом управления подачей топлива двигателя транспортного средства через подпружиненный толкатель, при этом подвижный элемент центробежного датчика последовательно соединен посредством рычага с органом управления распределителя и со штоком поршня сервомотора. Привод снабжен рычагом ручного управления, связанным посредством упругого элемента с подвижным элементом центробежного датчика.
Недостаток данного изобретения - не может быть обеспечен высокий уровень устойчивости технологических процессов, что не дает постоянной производительности. Источником неравномерности хода двигателя внутреннего сгорания является не только колебательный процесс в рабочих органах, приводимых валом отбора мощности, но и поступательная скорость в условиях неравномерности фона передвижения машинотракторного агрегата. Эти процессы в прототипе не регулируются.
Задача предлагаемого изобретения - обеспечение постоянной частоты вращения вала отбора мощности и поступательной скорости мобильного энергетического средства сельхозназначения при переменных нагрузках на двигателе внутреннего сгорания в заданных диапазонах внешних условий, что обеспечит высокий уровень устойчивости технологических процессов и постоянную производительность.
Поставленная задача достигается тем, что система привода мобильного энергетического средства сельхозназначения оборудована гидрообъемной передачей с органом управления, содержащая приводимый от двигателя энергетического средства гидронасос, гидравлически связанный с гидромотором, и механизм соединения вала отбора мощности с валом гидромотора, устройство для автоматического поддержания заданной частоты вращения, выполненное в виде датчика и гидравлического поршневого сервомотора, полости которого сообщены с источником давления рабочей жидкости и гидробаком. Причем бесступенчатые гидрообъемные приводы двух валов отбора мощности и ведущих мостов ходовой части мобильного энергетического средства снабжены системой следящих устройств в составе датчиков частот вращения и сервомеханизмов, соединенных электрическими связями с бортовым процессором, механическими шарнирно-рычажными связями сервомеханизмов с регуляторами частот вращения роторов приводимых гидронасосов и гидромоторов и с рабочими органами линейного возвратно-поступательного движения, при этом бортовой процессор снабжен программой регулирования поступательной скорости мобильного энергетического средства.
Предлагаемое изобретение поясняется чертежами.
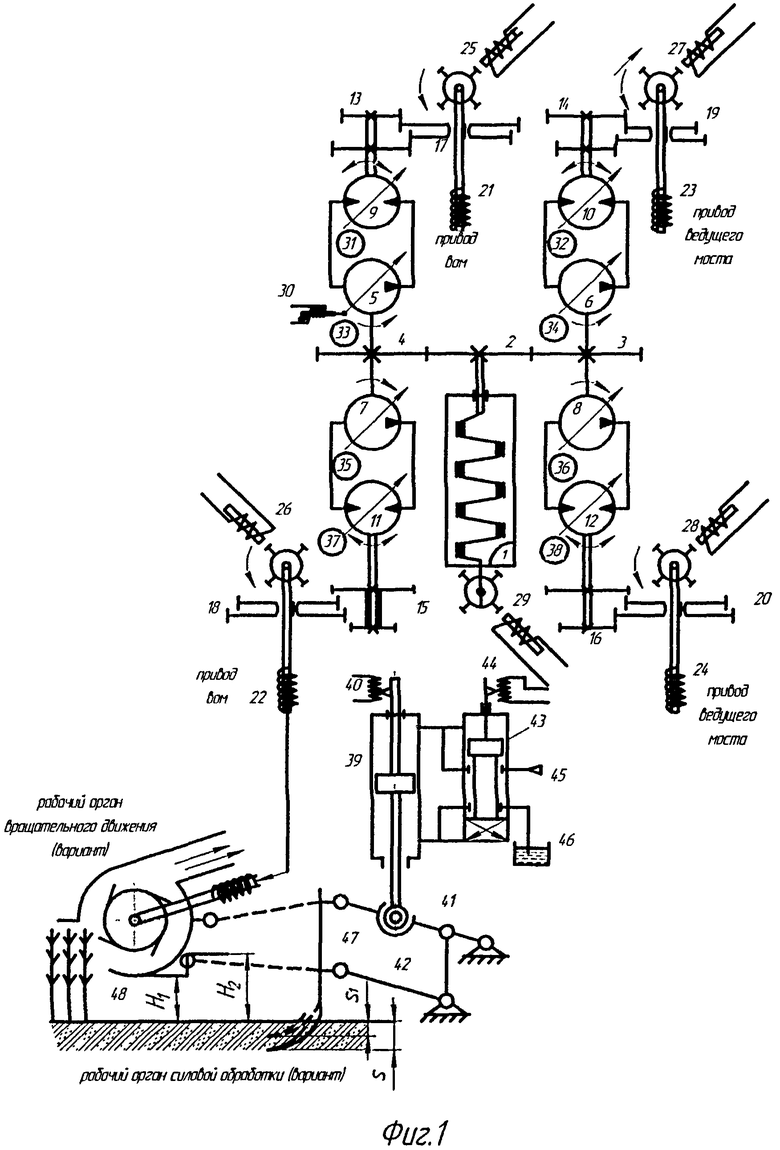
На фиг.1 изображена схема системы привода мобильного энергетического средства сельсхозназначения.
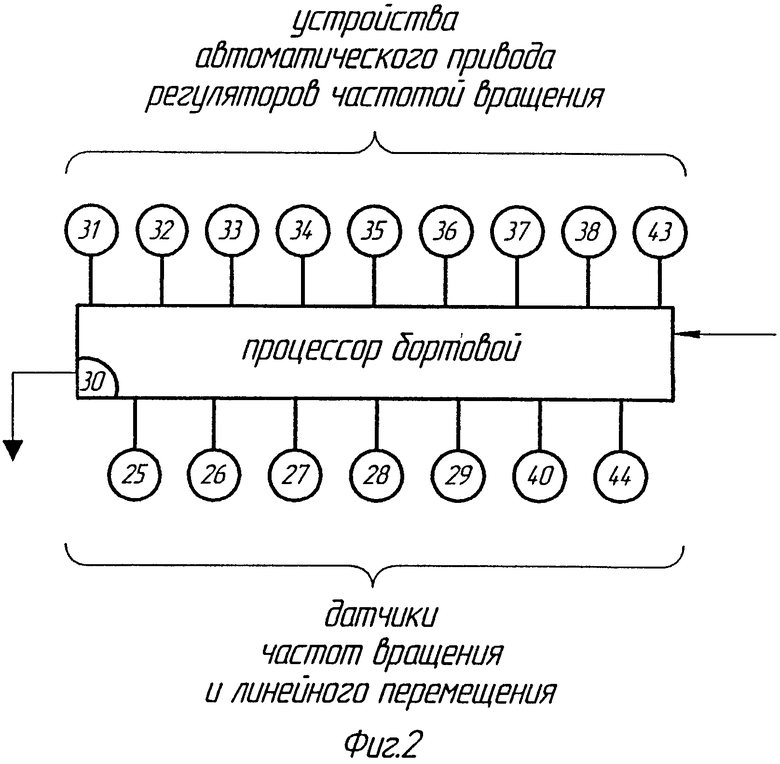
На фиг.2 - схема соединения бортового процессора с датчиками частоты вращения и сервомеханизмами.
Система привода мобильного энергетического средства сельхозназначения состоит из двигателя внутреннего сгорания (ДВС) 1 с валом, который через шестерни редуктора 2, 3 и 4 связан с регулируемыми гидронасосами 5, 6, 7 и 8, питающими регулируемые гидромоторы 9, 10, 11 и 12. На валах регулируемых гидромоторов 9, 10, 11 и 12 закреплены шестеренные двухвенцовые блоки 13, 14, 15 и 16, соединяющиеся со скользящими двухвенцовыми блоками, два из которых 17 и 18 обеспечивают двухступенчатые приводы двух (переднего и заднего) валов отбора мощности (ВОМ) на 540 об/мин и 1000 об/мин, а 19 и 20 - двухдиапазонный бесступенчатый привод ведущих мостов на поступательных скоростях: 0…14 км/ч - рабочий диапазон и 0…35 км/ч - транспортный диапазон.
Все рабочие валы: привода валов отбора мощности (ВОМ) 21, 22 и привода ведущих мостов 23, 24 снабжены датчиками частоты вращения 25, 26, 27 и 28. На валу ДВС 1 также установлен датчик частоты вращения 29.
Управление системой привода мобильного энергетического средства обеспечивается бортовым процессором 30 (фиг.2) посредством сервомеханизмов 31, 32, 33, 34, 35, 36 37 и 38, соединенных с рычагами регулирования гидронасосов 5, 6, 7, 8 и гидромоторов 9, 10, 11 12.
Автоматическое регулирование гидроцилиндра 39 передней навесной системы (на фиг.1 показана только передняя навесная система, аналогичная установлена и сзади энергетического средства) оборудовано реохордным датчиком 40, отслеживающим перемещение штока гидроцилиндра навесной системы и соединенным через шарниры с несущими рычагами 41 и 42, осуществляется с помощью поршневого гидравлического сервомеханизма 43. Гидравлический сервомеханизм 43, оборудованный реохордным датчиком 44, своими полостями сообщен с источником давления рабочей жидкости - гидронасосом 45 и гидробаком 46.
На навесных системах мобильного энергетического средства установлены рабочие органы, например, для мелкой почвообработки 47 и роторный рабочий орган 48 для скашивания с измельчением листостебельной массы силосных культур, энергия к которому подведена от ВОМ 22.
Работает система привода мобильного энергетического средства сельхозназначения следующим образом.
Работа мобильного энергетического средства сельхозназначения в поле начинается с установки параметров технологической операции. Например, устанавливается частота вращения роторного рабочего органа 48 для скашивания с измельчением листостебельной массы силосных культур, замеряемая датчиком частоты вращения 26, закрепленным на переднем ВОМ 22, и поддерживаемая соответствующими частотами вращения, распределяемыми регулируемыми гидронасосом 7 и гидромотором 11. Высота среза листостебельной массы силосных культур устанавливается с помощью несущих рычагов 41 и 42 навесной системы и поддерживаемая в заданном диапазоне гидроцилиндром 39, реохордным датчиком 40 перемещения и сервомеханизмом 43. Далее с помощью бортового процессора 30 устанавливается рабочая скорость поступательного движения мобильного энергетического средства сельхозназначения из диапазона скоростей 0…35 км/ч. Оно осуществляется передачей мощности от вала ДВС 1 через шестерни редуктора 2 и 3 с помощью механических соединений на регулируемые гидронасосы 6 и 8, которые гидравлически связаны с регулируемыми гидромоторами 10 и 12. Последние в свою очередь через шестеренные двухвенцовые блоки 14 и 16 соединяются со скользящими двухвенцовыми блоками 19 и 20, которые соединены с валами 23 и 24 привода передних и задних ведущих мостов, частота вращения которых контролируется датчиками частоты вращения 27, 28 и регулируется сервомеханизмами 32, 34, 36, 38 по команде бортового процессора 30, к которому они подсоединены.
Привод на передний и задний ВОМ 21 и 22 передается от вала ДВС 1 через шестерни редуктора 2 и 4 на регулируемые годронасосы 5 и 7, которые гидравлически соединены с регулируемыми гидромоторами 9 и 11. Регулируемые гидромоторы 9 и 11 в свою очередь соединены с шестеренными двухвенцовыми блоками 13 и 15 и далее со скользящими двухвенцовыми блоками 17 и 18 привода валов отбора мощности 21 и 22.
Особенностью предлагаемой конструкции является то, что приводы ведущих колес, валов отбора мощности и навесных систем работают синхронно с заданной частотой вращения.
При этом все датчики (фиг.2) частот вращения 25, 26, 27, 28, 29, реохордные 40 и 44, а также сервомеханизмы 31, 32, 33, 34, 35, 36 37 38 и 43 соединены с бортовым процессором 30. Он обрабатывает информацию, поступающую от датчиков 25, 26, 27, 28, 29, 40 и 44, по специальной программе и подает команды на сервомеханизмы 31, 32, 33, 34, 35, 36, 37 38 и 43, регулирующие силовой гидропривод, поддерживая частоту вращения рабочих органов и органов трансмиссии на постоянном уровне.
В случае работы без включения рабочих органов система: датчики частоты вращения - бортовой процессор - сервомеханизмы - поддерживают на постоянном уровне частоты вращения приемных валов трансмиссии независимо от колебания частоты вращения коленчатого вала ДВС; при этом имеем в виду, что ДВС мобильного энергетического средства всегда работает на выработку мощности номинального уровня и номинальную частоту вращения вала. В случае колебания нагрузки на ходовой части (передний и задний ведущие мосты) сервомеханизмы 32, 34, 36 и 38 по команде бортового процессора 30 поддерживают заданные величины в постоянном режиме.
Второй вариант работы связан с включением в работу второго рабочего органа, например, для мелкой почвообработки 47. Здесь используются данные полевого задания, когда глубина обработки S±ΔS; величина |ΔS| задает возможный диапазон колебания глубины обработки почвы, имея в виду, что, во-первых, изменения (колебания) глубины обработки во времени аппроксимируются стационарным вероятностным процессом, и, во-вторых, устанавливаются допустимые пределы колебания этой величины, которые могут быть равны технологическому допуску или заведомо превосходить его по результатам специальных исследований. При появлении нагрузки ДВС 1 стремится к уменьшению частоты вращения вала. Бортовой процессор 30, воздействуя своими командами через сервомеханизм 43, выглубляет на некоторую величину рабочий орган 47 через рычаги навесной системы 41 и 42 посредством гидроцилиндра 39. При этом снижается тяговое сопротивление и снижается потребляемая энергия, снимаемая величина которой перераспределяется механизмами регулирования силовых элементов гидропривода, и ДВС возвращается в установившийся режим.
Третий вариант включает в работу роторный рабочий орган 48, приводимый от ВОМ 22 карданной передачей. Диапазон регулирования высоты |H2-H1| (фиг.1) При обнаружении тенденции перегрузки ДВС 1 и снижения частоты вращения роторного рабочего органа 48 бортовой процессор 30 подает команды на сервомеханизмы 35, 37 для выравнивания частоты вращения ВОМ 22 и одновременно на сервомеханизм 43 для некоторого выглубления рабочего органа 48 из стеблестоя, восстанавливая тем самым первоначальное положение.
Четвертый вариант предусматривает взаимодействие обоих рабочих органов 47 и 48 с внешней обрабатываемой средой. В обнаружении тенденции бортовым процессором 30 к перегрузке ДВС и снижении частоты вращения роторного рабочего органа 48, а также поступательной скорости он подает команду на выравнивание поступательной скорости, одновременно просчитывает вариант выглубления с максимальным эффектом по критерию минимума действия, сравнивая выглубление обоих органов, либо каждого в отдельности.
Использование предлагаемой конструкции позволяет поддерживать в пределах заданный скоростной режим рабочих органов, повышая качество полевых работ, устанавливая предельно допустимую величину производительности, повышая надежность и долговечность двигателя, работающего с полным использованием технических возможностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА МАШИНЫ С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2529111C1 |
| МОБИЛЬНОЕ ЭНЕРГЕТИЧЕСКОЕ СРЕДСТВО | 2017 |
|
RU2661268C1 |
| КОЛЕСНОЕ ЭНЕРГЕТИЧЕСКОЕ СРЕДСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2000 |
|
RU2220856C2 |
| ЛЕСНАЯ МАШИНА | 1995 |
|
RU2118262C1 |
| ПРИВОД НЕЗАВИСИМОГО ВАЛА ОТБОРА МОЩНОСТИ ТЯГОВО-ТРАНСПОРТНЫХ СИСТЕМ | 1999 |
|
RU2162798C2 |
| Мобильное энергетическое средство | 1990 |
|
SU1710375A1 |
| Привод независимого вала отбора мощности транспортного средства | 1977 |
|
SU747746A1 |
| СИСТЕМА КОНТРОЛЯ ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИИ МАШИНЫ | 2013 |
|
RU2545144C2 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2004 |
|
RU2267432C2 |
| ЗЕМЛЕРОЙНО-ТРАНСПОРТНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2537434C1 |
Изобретение относится к области сельскохозяйственного и тракторного машиностроения и может быть использовано для агрегатирования с сельскохозяйственными машинами. Система оборудована гидрообъемной передачей с органом управления. Гидрообъемная передача содержит приводимый от двигателя энергетического средства гидронасос, механизм соединения вала отбора мощности с валом гидромотора, устройство для автоматического поддержания заданной частоты вращения. Гидронасос гидравлически связан с гидромотором. Бесступенчатые гидрообъемные приводы двух валов отбора мощности и ведущих мостов ходовой части мобильного энергетического средства снабжены системой следящих устройств. Система следящих устройств состоит из датчиков частот вращения и сервомеханизмов. Датчики частот вращения и сервомеханизмы соединены электрическими связями с бортовым процессором. Сервомеханизмы регулируют частоту вращения роторов приводимых гидронасосов и гидромоторов посредством механических шарнирно-рычажных связей. Бортовой процессор снабжен программой регулирования поступательной скорости мобильного энергетического средства. Технический результат заключается в обеспечении высокого уровня устойчивости технологических процессов и постоянной производительности. 2 ил.
Система привода мобильного энергетического средства сельхозназначения, оборудованная гидрообъемной передачей с органом управления, содержащая приводимый от двигателя энергетического средства гидронасос, гидравлически связанный с гидромотором, и механизм соединения вала отбора мощности с валом гидромотора, устройство для автоматического поддержания заданной частоты вращения, выполненное в виде датчика и гидравлического поршневого сервомотора, полости которого сообщены с источником давления рабочей жидкости и гидробаком, отличающаяся тем, что бесступенчатые гидрообъемные приводы двух валов отбора мощности и ведущих мостов ходовой части мобильного энергетического средства снабжены системой следящих устройств в составе датчиков частот вращения и сервомеханизмов, соединенных электрическими связями с бортовым процессором, механическими шарнирно-рычажными связями сервомеханизмов с регуляторами частот вращения роторов приводимых гидронасосов и гидромоторов и с рабочими органами линейного возвратно-поступательного движения, при этом бортовой процессор снабжен программой регулирования поступательной скорости мобильного энергетического средства.
| Привод независимого вала отбора мощности транспортного средства | 1977 |
|
SU747746A1 |
| Механизм привода вала отбора мощности транспортного средства | 1983 |
|
SU1142315A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ КАЧЕСТВОМ ОБРАБОТКИ ПОЧВЫ ФРЕЗОЙ | 1995 |
|
RU2088062C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ШВОВ ПРИ СВАРКЕ ПОВОРОТНЫХ КОЛЬЦЕВЫХ СТЫКОВ | 1991 |
|
RU2022748C1 |

