Изобретение относится к области транспортного машиностроения и может быть использовано при синтезе систем управления поворотом быстроходных гусеничных машин (БГМ), оснащенных гидромеханической трансмиссией (ГМТ) и дифференциальным механизмом поворота с гидрообъемным приводом.
Известна система управления поворотом БМП Marder (Бурцев С.Е. "Основы применения гидрообъемных вариантов типовых трансмиссий", 1983 г. Изд-во Киевское ВТИУ рис. 3.41, стр. 200), которая содержит гидропривод, включающий гидронасос, кинематически через редуктор соединенный с двигателем, а гидромотор соединен с дифференциальным механизмом, ведомые элементы которого соединены с солнечными шестернями суммирующих планетарных рядов трансмиссий. Параллельно гидроприводу включена гидромуфта с регулируемым в процессе поворота наполнением, это обеспечивает высокую управляемость движения гусеничной машины, в том числе при входе в поворот и в процессе движения в повороте. Основным недостатком этой системы является недостаточное быстродействие, особенно при выходе из поворота, большая длительность переходных процессов, приводящая к режиму эволюционного движения.
Наиболее близкой по технической сути и достигаемому результату является система управления поворотом БМП-3 (Боевая машина пехоты БМП-3. Руководство по эксплуатации. 4.1. Техническое описание. - Ростов-на-Дону: Изд-во ООО БелРусь, 2010 г. - рис. 6.6, стр. 295, рис. 7.5, стр. 327-329), которая содержит управляемый командным органом (штурвалом) гидрообъемный привод, ведущий вал гидронасоса которого соединен с двигателем, а ведомый вал гидромотора соединен с валом дифференциального механизма поворота. На валу расположены шестерни, кинематически соединенные с солнечными шестернями СПР одного борта БГМ через промежуточную шестерню, а второго борта - непосредственно.
Водитель, воздействуя посредством приводов управления на гидропривод, изменяет режим его работы и тем самым изменяет направление движения машины. При этом контроль за поведением машины осуществляет водитель. Для компенсации возникающих отклонений траектории водитель воздействует на органы управления, пытаясь реализовать требуемую траекторию движения с необходимой для безопасности точностью. Однако вследствие ограниченности психофизиологических свойств водителя, его утомляемости в процессе длительного движения принятые решения и реализуемое им управляющее воздействие характеризуются большим количеством ошибок. В связи с этим, в ряде технических решений предложено ввести систему дополнительного автоматического управления наклонной шайбой управления насоса гидропривода. Для этого в систему управления дополнительно включается бортовой компьютер, сенсоры положения и перемещения штурвала, педали подачи топлива, числа оборотов двигателя, номера включенной передачи, а также гироскопического датчика угловой скорости, соединенного с бортовым компьютером. При отклонении параметров траектории, организованная обратная связь управления наклонной шайбой насоса ГОП отрабатывает разность между управляющим воздействием и управляемым параметром, подавая сигнал на второй канал (электронный) управления гидронасосом (Держанский В.Б., Тараторкин И.А. "Прогнозирование динамической нагруженности трансмиссий транспортных машин" - Курган: Изд-во Курганского гос. ун-та, 2008 г., рис. 3.19, стр. 145).
Основной недостаток этой системы состоит в том, что жесткая кинематическая связь солнечной шестерни суммирующего ряда через гидропривод с двигателем приводит к тому, что в такой системе угловая скорость поворота гусеничной машины зависит не только от угла поворота штурвала, но и от частоты вращения вала двигателя (положение педали подачи топлива). При движении гусеничной машины на высших передачах на твердых дорогах с незначительным сопротивлением повороту угловая скорость является функцией двух управлений - угла поворота штурвала и педали подачи топлива, не зависит от номера включенной передачи. Передаточные числа определяются из условия движения без бокового заноса на грунтах с высокими сцепными свойствами на максимальном скоростном режиме. При этом расчетная угловая скорость поворота принимается равной 1 рад/с. Это обеспечивает высокие скоростные качества машины на дорогах с интенсивным изменением кривизны. Однако при движении машины со скоростью ниже максимальной, при вращении вала двигателя на режиме максимального момента угловая скорость поворота снижается в 1,5…2 раза и может быть недостаточной. Для вписывания в требуемую траекторию при движении по окружности с радиусом 20 м по сухой бетонной дороге со скоростью, предельной по заносу, равной 12,6 м/с, угловая скорость должна составлять 0,63 рад/с. Если двигатель работает на режиме максимального момента, то расчетная угловая скорость составляет 0,5 рад/с. При юзе и буксовании гусениц фактическая угловая скорость поворота еще меньше и не превышает 0,33…0,38 рад/с (принято, что на установившемся режиме коэффициент буксования гусениц определяется отношением длины опорной поверхности к ширине колеи). Следовательно, передаточное число привода дифференциального механизма от гидромотора ГОП должно быть регулируемым для обеспечения необходимой угловой скорости поворота машины при работе двигателя не на максимальной угловой скорости.
Для устранения основного недостатка системы управления поворотом, состоящей из объемного гидропривода, включающего гидронасос и гидромотор, гидронасос которого кинематически через механический редуктор соединен с двигателем машины, а первый канал управления - с задающим (командным) органом управления поворотом (штурвалом), бортовой компьютер, сенсоры положения и перемещения: αшт штурвала, αпт педали подачи топлива, числа оборотов двигателя, номера включенной передачи, дифференциального механизма, ведомые элементы которого кинематически соединены с солнечными шестернями суммирующего планетарного ряда трансмиссии, дополнительно вводится двухступенчатый планетарный редуктор, соединяющий гидромотор гидропривода с дифференциальным механизмом поворота и управляемый двумя фрикционными элементами.
Схема предложенной системы приведена на фиг.1. Система управления состоит из объемного гидропривода - 1, включающего управляемый гидронасос - 2 с двумя каналами управления и гидромотор - 3. Гидропривод - 1 кинематически через механический редуктор - 4 соединен с двигателем машины - 5. Первый канал управления гидропривода - 1 соединен с задающим (командным) органом управления поворотом - 6 (штурвалом). С бортовым компьютером соединены сенсоры положения и перемещения штурвала - 8 (αшт), педали подачи топлива - 9 (αпт), частоты вращения вала двигателя - 10 (nд) и номера включенной передачи - 11 (mj). Ведомые элементы дифференциального механизма - 12 кинематически соединены с солнечными шестернями 13 и 14 суммирующих планетарных рядов (СПР). Механический привод от гидромотора - 3 к дифференциальному механизму - 12 осуществляется через двухступенчатый планетарный редуктор - 15. Редуктор - 15 состоит из водила - 16, солнечной шестерни - 17 и эпицикла -18 и управляется двумя фрикционными элементами через серводвигатели 19 и 20. Серводвигатели гидравлически соединены с управляемыми клапанами - 21, 22, которые соединены с бортовым компьютером - 7.
Работает предлагаемая система следующим образом. Включение системы происходит при движении БГМ с большой скоростью на высоких передачах (υ>35 км/ч). Водитель, анализируя характер изменения траектории дороги и прогнозируя реакцию машины на управляемое воздействие, при отклонении дороги от выбранного ранее направления движения создает в соответствии с навыками вождения упреждающее управляющее воздействие - поворачивает штурвал 6 на некоторый угол αшт. Соответствующий сигнал сенсора 6, как и положение педали подачи топлива αпт 9, частоты вращения вала двигателя nд 10 и номера включенной передачи mj 11 поступают в бортовой компьютер 7. На основе этих сигналов определяется параметр управляемого движения: расчетная угловая скорость поворота ωp(αшт, αпт). Если движение машины осуществляется на одной из высших передач и значение расчетной угловой скорости меньше 0,75…0,80 максимально возможной, то соответствующий сигнал бортового компьютера 7 поступает на вход пропорционального клапана 21 и 22 клапанной коробки, и серводвигатели 19 и 20 осуществляют выключение фрикциона и включение тормоза дополнительно введенного редуктора 15. Солнечная шестерня - 17 при этом останавливается, и тем самым происходит снижение передаточного числа дополнительно введенного редуктора, а угловая скорость его эпицикла - 18 возрастает. Благодаря этому возрастает и угловая скорость солнечных шестерней 13 и 14 суммирующих планетарных рядов, соответственно, и угловая скорость поворота машины.
Эффективность предложенного решения заключается в повышении степени реализации потенциальных скоростных качеств машины за счет возможности поворота гусеничной машины с высокой угловой скоростью, то есть - вписывание в заданную траекторию без дополнительного переключения передач в трансмиссии машины. Это снижает требуемый уровень квалификации водителя и степень его утомляемости.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2645487C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДВИЖЕНИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2011 |
|
RU2480361C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕБУЕМОГО ПОВОРАЧИВАЮЩЕГО МОМЕНТА СИСТЕМЫ УПРАВЛЕНИЯ ПОВОРОТОМ ГУСЕНИЧНОЙ МАШИНЫ | 2017 |
|
RU2665159C1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| Трансмиссия транспортного средства | 1988 |
|
SU1556942A1 |
| ДВУХПОТОЧНАЯ ТРАНСМИССИЯ ТАНКА | 2017 |
|
RU2652542C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| Устройство поворота транспортного средства | 1990 |
|
SU1733280A1 |
| ТРАНСМИССИЯ ТРАКТОРА | 2010 |
|
RU2418707C1 |
Изобретение относится к системе управления поворотом быстроходных гусеничных машин (БГМ). БГМ оснащена гидромеханической трансмиссией и дифференциальным механизмом поворота с гидрообъемным приводом. Система управления поворотом состоит из объемного гидропривода, гидронасос которого кинематически через механический редуктор соединен с двигателем машины, а первый канал управления - с задающим (командным) органом управления поворотом (штурвалом), бортовой компьютер, сенсоры положения и перемещения: штурвала, педали подачи топлива, числа оборотов двигателя, номера включенной передачи, дифференциального механизма, ведомые элементы которого кинематически соединены с солнечными шестернями суммирующего планетарного ряда трансмиссии. Система управления поворотом дополнительно включает двухступенчатый планетарный редуктор, соединяющий гидромотор гидропривода с дифференциальным механизмом поворота и управляемый двумя фрикционными элементами. Достигается повышение скоростных качеств машины. 1 ил.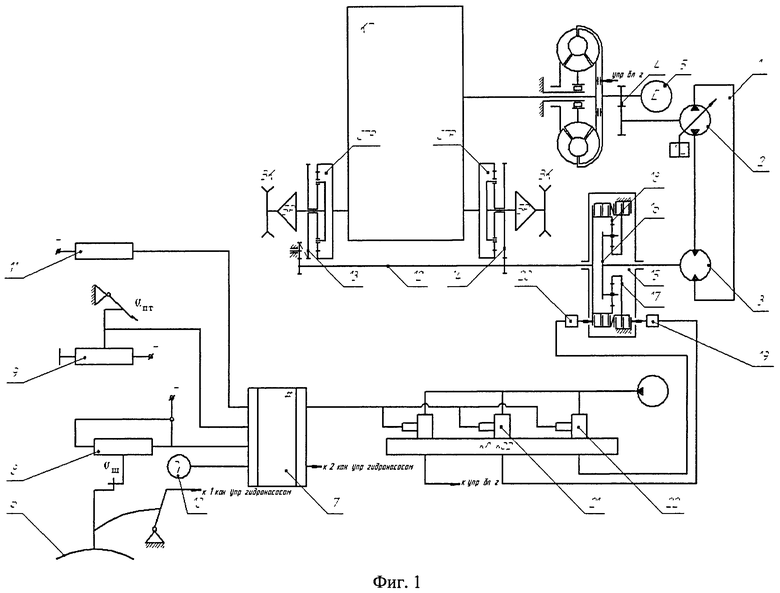
Система управления поворотом быстроходной гусеничной машины, состоящей из объемного гидропривода, включающего гидронасос и гидромотор, гидронасос которого кинематически через механический редуктор соединен с двигателем машины, а первый канал управления - с задающим (командным) органом управления поворотом (штурвалом), а второй канал - с бортовым компьютером, со входом которого соединены сенсоры положения и перемещения: штурвала, педали топлива, числа оборотов двигателя, номера включенной передачи, дифференциального механизма, ведомые элементы которого кинематически соединены с солнечными шестернями суммирующего планетарного ряда трансмиссии, отличающаяся тем, что механический привод от гидромотора к дифференциальному механизму осуществляется через двухступенчатый планетарный редуктор, состоящий из водила, солнечной шестерни и эпицикла, управляемый двумя фрикционными элементами, а управляемые клапана серводвигателей фрикционных элементов электрически соединены с бортовым компьютером информационно-измерительной управляющей системой трансмиссии (ИИУСТ).
| ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКИЙ АГРЕГАТ | 2003 |
|
RU2252179C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОВОРОТОМ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU2109650C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2005 |
|
RU2297355C2 |
| Система поворота шарнирно-сочлененной гусеничной машины | 1987 |
|
SU1444222A1 |
| Гидрообъемная трансмиссия гусеничного транспортного средства | 1976 |
|
SU1110703A1 |

