Изобретение относится к навигации, а именно к системам определения положения объекта без использования отражения или вторичного излучения, и может быть использовано для систем предупреждения столкновения транспортных средств, например автомобилей, с препятствиями.
Известны оптические устройства дистанционного измерения координат подвижных объектов, содержащие размещаемые на транспортном средстве оптико-локационные блоки (ОЛБ). Оптико-локационные блоки определяют направления на отдельные подвижные объекты, используя которые определяют координаты подвижных объектов. В ОЛБ широко используют двумерные анализаторы плоских изображений, например, на основе матричных фотодетекторов в сочетании с дальномерным устройством [1].
Известен способ определения положения контролируемого объекта или отдельных его точек в трехмерном пространстве [1], относящийся к системам технического зрения (СТЗ). Способ основан на трехмерной локации точки с помощью трех или двух измерительных систем, оптические оси которых направлены вдоль осей ортогональной системы координат (X, Y, Z) и пересекаются в ее начале.
Используя, например, два ОЛБ с системами отсчета координат внутри каждого, можно определить координаты точки А путем решения следующей системы уравнений:
xA=αx1(-d1+αx3d3)/(1+αx3αx1), … CTЗ 1
уA=αx3(d3+αx1d1)/(1+αx3αx1), … CTЗ 3
zA=-αу3(d3+αx1d1)/(1+αx3αx1), … CTЗ 3
zA=-αу1(-d1+αx3d3)/(1+αx3αx1), … CTЗ 1,
где αxj - угловая координата точки А, отсчитанная от оси х в j-м ОЛБ; αyj - угловая координата точки А, отсчитанная от оси у в j-м ОЛБ; dj - расстояние до начала координат от передней узловой точки фотообъектива j-го ОЛБ.
Недостатком описанного выше аналога является невозможность измерения высоты препятствий.
Известен наиболее близкий по технической сущности к изобретению способ, описанный в [2], относящийся к системам дистанционного определения координат подвижных объектов - системам технического зрения. Способ локации источника излучения основан на использовании двух одинаковых оптико-локационных блоков, каждый из которых содержит сканирующее зеркало, объектив и фотоприемник. В качестве точки отсчета углов-пеленгов используют точку, расположенную на пересечении сканирующего зеркала и оптической оси объектива. При определении углов-пеленгов определяют смещение точек отсчета углов-пеленгов за счет сканирования и определяют изменение расстояния между оптико-локационными блоками, в качестве которого принимают расстояние между точками отсчета углов-пеленгов в оптико-локационных блоках, которое используют при определении координат источников излучения.
Известно устройство, реализующее этот способ, содержащее два оптико-локационных блока, соединенных с блоком определения углов-пеленгов источников излучения, соединенным с блоком определения координат источников излучения, при этом каждый из оптико-локационных блоков содержит сканирующее зеркало, объектив и фотоприемник и введены блок определения смещения точек отсчета углов-пеленгов, блок ввода и хранения данных расстояния между оптико-локационными блоками и сумматор, при этом в качестве точки отсчета углов-пеленгов принимают точку, расположенную на пересечении сканирующего зеркала и оптической оси объектива, выход блока определения углов-пеленгов соединен с входом блока определения смещения точек отсчета углов-пеленгов, выходы блока определения смещения точек отсчета углов-пеленгов и блока ввода и хранения данных расстояния между оптико-локационными блоками соединены с сумматором, выход которого соединен с блоком определения координат источников излучения.
Недостатком описанного выше прототипа является невозможность измерения высоты препятствий.
Технической задачей изобретения является определение неровностей автодороги и допустимой скорости движения по ней.
Технический результат при использовании заявляемой группы изобретений заключается в контроле качества поверхности автодороги, определении ее опасных неровностей и допустимой скорости движения автомобиля, в соответствии с реальным качеством дорожного покрытия, что достигается за счет использования высокоточного измерителя первичной навигационной информации - двух оптико-локационных блоков и вычислителя.
В заявляемой группе изобретений - способе и устройстве - единый технический результат изобретения достигается тем, что в способе определения неровностей автодороги, заключающемся в использовании оптико-локационных блоков, каждый из которых содержит фотообъектив и фотоматрицу, а также вычислителя, измерение высоты неровностей осуществляют относительно плоскости, аппроксимирующей поверхность автодороги, задаваемой тремя точками А, В, С, осуществляют обработку оцифрованных изображений поверхности автодороги, снимаемых с двух разнесенных оптико-локационных блоков, установленных на автомобиле, выбирают в поле изображения m×n идентичных точек, образующих прямоугольную сетку, где m и n - число узлов сетки по глубине и ширине, при этом используют оптически неоднородные фрагменты покрытия автодороги, определяют координаты Yijν, Zijν, м, идентичных точек на изображениях поверхности автодороги, где первый индекс обозначает номер i=1…m узла, отсчитанный вдоль оси ОХ, второй индекс обозначает номер j=1…n узла, отсчитанный вдоль оси OZ, третий индекс обозначает номер ν=1, 2 фотоматрицы, по координатам Yijν, Zijν вычисляют координаты узлов сетки в системе координат, связанной с автомобилем,

где F - фокусное расстояние первого и второго фотообъективов, м;
В - расстояние между фотоматрицами, м,
вычисляют координаты точек А, В, С,
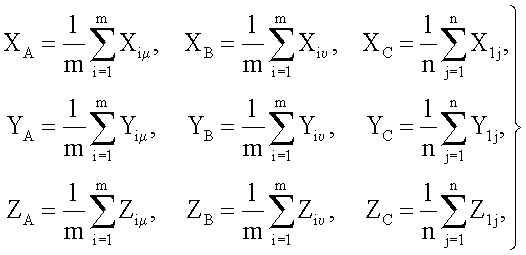
где µ и υ - значения индекса j=µ и j=υ, соответствующие линиям соприкосновения левых и правых колес автомобиля с дорожным покрытием, вычисляют высоту узлов выбранной сетки относительно плоскости, аппроксимирующей поверхность автодороги, задаваемой точками А, В, С,
hij=(YA-Yij)Ny+(XA-Xij)Nx+(ZA-Zij)Nz,
где NX=(YA-YB)(ZA-ZC)-(YA-YC)(ZA-ZB), Ny=(ZA-ZB)(XA-XC)-(XA-XB)(ZA-ZC), Nz=(XA-XB)(YA-YC)-(XA-XC)(YA-YB),
для всех i=1…m и j=1…n, посредством неравенства hij≥hдп, определяют узлы, высота которых превышает величину дорожного просвета автомобиля hдп, и отождествляют их с препятствиями, вычисляют среднюю оценку дисперсии высоты неровностей автодороги

определяют допустимую скорость автомобиля для левой и правой линий соприкосновения колес с поверхностью автодороги
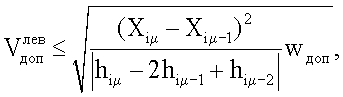

где wдоп - допустимое виброускорение автомобиля,
определяют наименьшее значение этих величин как допустимую скорость автомобиля

Заявляемый способ осуществляется при помощи устройства для определения неровностей поверхности автодороги, включающего два разнесенных оптико-локационных блока, содержащих каждый фотообъектив и фотоматрицу, а также цифровой вычислитель, включающий блок определения координат источников излучения, которыми являются оптически неоднородные фрагменты покрытия автодороги, два разнесенных оптико-локационных блока установлены на автомобиле, цифровой вычислитель дополнительно включает модуль обработки оцифрованных изображений поверхности автодороги, обеспечивающий нахождение идентичных точек, образующих прямоугольную сетку m×n, где m и n - число узлов сетки по глубине и ширине, блок определения координат источников излучения представляет собой модуль описания поверхности автодороги, дополнительно обеспечивающий вычисление превышений узлов сетки, при этом модуль обработки оцифрованных изображений поверхности автодороги, в котором определяют координаты изображений идентичных точек в узлах сетки на фотоматрицах, своим первым и вторым входами связан с плоской фотоматрицей первого и плоской фотоматрицей второго оптико-локационных блоков, на которых с помощью фотообъектива первого и второго оптико-локационных блоков формируются изображения поверхности автодороги, и определяются координаты идентичных точек в узлах сетки на первой и второй фотоматрицах, а своим выходом связан с входом модуля описания поверхности автодороги, где вычисляются координаты идентичных точек в узлах сетки, в системе координат, связанной с автомобилем, выход модуля описания поверхности автодороги связан с входами модуля оценки качества поверхности автодороги, модуля определения препятствий, модуля определения допустимой скорости движения, при этом в модуле оценки качества поверхности автодороги вычисляется средняя оценка дисперсии высоты неровностей автодороги, в модуле определения препятствий осуществляется проверка превышения высоты узлов сетки над высотой дорожного просвета автомобиля и отождествление их препятствиям, в модуле определения допустимой скорости движения вычисляется допустимая скорость движения автомобиля на контролируемом участке автодороги.
Существенными отличительными признаками от прототипа по способу является следующая совокупность действий:
выбор в поле изображения m×n идентичных точек, образующих прямоугольную сетку;
вычисление высоты узлов, выбранной сетки;
вычисление средней оценки дисперсии высоты неровностей автодороги;
определение узлов, высота которых превышает величину дорожного просвета автомобиля, и отождествление их с препятствиями;
вычисление допустимой скорости автомобиля.
По устройству - наличие следующих элементов:
модуля обработки оцифрованных изображений поверхности автодороги;
модуля описания поверхности автодороги;
модуля оценки качества поверхности автодороги;
модуля определения препятствий;
модуля определения допустимой скорости движения.
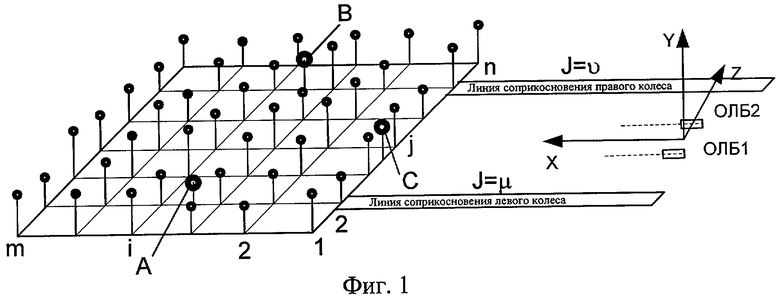
На фиг.1 изображена совокупность m×n идентичных точек, выбираемых в поле изображения поверхности автодороги, образующих прямоугольную сетку.
На фиг.2 приведена структура заявляемого устройства для определения неровностей поверхности автодороги, где
1 - первый оптико-локационный блок;
2 - второй оптико-локационный блок;
3 - вычислитель;
4 - фотообъектив первого ОЛБ;
5 - плоская фотоматрица первого ОЛБ;
6 - фотообъектив второго ОЛБ;
7 - плоская фотоматрица второго ОЛБ;
8 - модуль обработки оцифрованного изображения поверхности автодороги;
9 - модуль описания поверхности автодороги;
10 - модуль оценки качества поверхности автодороги;
11 - модуль определения препятствий;
12 - модуль определения допустимой скорости движения.
Определение неровностей поверхности автодороги можно описать следующим образом.
Пусть транспортное средство имеет два разнесенных оптико-локационных блока с параллельными оптическими осями, связанные с вычислителем. Посредством фотообъективов ОЛБ на плоских фотоматрицах получают изображения поверхности автодороги, которые подвергаются обработке в вычислителе, где решается задача определения координат точек фотоэкспонируемого участка дороги.
Выберем в поле изображения дорожного полотна m×n точек дорожного полотна, образующих прямоугольную сетку, где m и n - число узлов сетки по глубине и ширине (фиг.1). В окрестности каждой точки выбранной сетки находим идентичные точки, при этом используются оптически неоднородные фрагменты покрытия автодороги. Эти действия осуществляются методами, описанными в [1], например с использованием оконтуривания изображения и дальнейшего выделения в нем точек излома контура. Применение цветного изображения позволяет решать эту задачу еще более простыми приемами, например выделение пикселей (для большей надежности могут использоваться группы пикселей) с определенным соотношением интенсивностей цветовых компонент.
Координаты идентичных точек (Xij, Yij, Zij) в системе координат OXYZ (фиг.2), где i - номер точки по глубине, j - номер точки по ширине, могут быть найдены по формулам.


где Yij1, Zij1, Yij2, Zjj2 - координаты идентичных точек с индексами i и j на 1 и 2 фотоматрицах ОЛБ1 и ОЛБ2 соответственно.
Удаление ближайшей строки точек (i=1) от автомобиля должно определяться нижней границей зоны видимости фотокамер, что гарантирует попадание этой линии визирования в дорожное полотно даже на существенно выпуклых участках дороги. В общем случае не идеально плоской поверхности автодороги совокупность выбранных точек определяет некоторую криволинейную поверхность, которую аппроксимируем плоскостью. Для выбора трех точек, определяющих эту плоскость, используем процедуру осреднения координат. Причем осреднение осуществим по точкам с индексами 1µ, 2µ, 3µ, …mµ; 1υ, 2υ, 3υ…mυ, которые целесообразно выбрать на линиях соприкосновения колес автомобиля с дорожным покрытием (то есть j=µ и j=υ). Третью точку выберем как результат осреднения точек, образующих ближайшую к автомобилю строку (i=1) с индексами 11, 12, 13,…1n. Запишем координаты точек А, В, С в соответствии с избранным порядком осреднения.

Процедура осреднения предназначена для фильтрации влияния локальных неровностей автодороги на положение аппроксимирующей плоскости. Запишем вектор нормальный к плоскости определяемой этими точками

где NX=(YA-YB)(ZA-ZC)-(YA-YC)(ZA-ZB), Ny=(ZA-ZB)(XA-XC)-(XA-XB)(ZA-ZC), Nz=(XA-XB)(YA-YC)-(XA-XC)(YA-YB).
Будем считать, что эта плоскость определяет поверхность проезжей части дороги. Тогда для нахождения расстояния от этой поверхности до произвольной точки (Xij, Yij, Zij) поверхности дороги найдем скалярное произведение вектора  на вектор, начало которого лежит на плоскости, а конец - в точке (Xij, Yij, Zij).
на вектор, начало которого лежит на плоскости, а конец - в точке (Xij, Yij, Zij).
Найдем высоту неровности, которая определяется как расстояние от точки (Xij, Yij, Zij) до плоскости проезжей части

Характер неровностей определяется знаком hij. Если hij>0 (7), то точка расположена над плоскостью (выпуклость), при hij<0 (8) - точка расположена под плоскостью (впадина). Для всех i=1…m и j=1…n посредством неравенства hij≥hдп (9) определяют узлы, высота которых превышает величину дорожного просвета автомобиля hдп, узлы, для которых выполняется неравенство, отождествляют с препятствиями.
Таким образом, анализ положения точек дорожного полотна посредством соотношений (6), (7), (8) и (9) позволяет выявить опасные неровности на дороге и на основе этой информации решать как задачи по управлению транспортным средством, в том числе и в автоматическом режиме, так и задачи по предупреждению столкновений с препятствиями.
Результатам описанной выше задачи может быть найдено еще одно важное применение. Поскольку в результате анализа изображений и вычислений превышений точек земной поверхности содержится достаточно полная информация о неровности автодороги, то имеется возможность оценить допустимую скорость автомобиля в зависимости от ее неровности. В качестве такой характеристики представляется логичным использовать оценку дисперсии высоты неровностей hij, взятых вдоль линий соприкосновения колес автомобиля с дорожным покрытием (j=µ и j=υ). Поскольку такая оценка характеризует степень волнистости (ухабистости) дорожного покрытия, по которому осуществляется качение колес, то ограничение скорости движения должно быть связано с величиной
 м2 - оценка дисперсии случайной величины hiµ в сечении j=µ. Однако использование оценки дисперсии высоты неровностей приводит к необходимости экспериментального нахождения зависимости допустимой скорости движения от волнистости покрытия дороги, то есть от
м2 - оценка дисперсии случайной величины hiµ в сечении j=µ. Однако использование оценки дисперсии высоты неровностей приводит к необходимости экспериментального нахождения зависимости допустимой скорости движения от волнистости покрытия дороги, то есть от  Поэтому используем оценку дисперсии высоты неровностей как меру качества автодороги. Осредняя соотношение (10) по всем столбцам (по всей ширине автодороги), придаем введенной характеристике волнистости покрытия автодороги всеобщий (интегральный) характер
Поэтому используем оценку дисперсии высоты неровностей как меру качества автодороги. Осредняя соотношение (10) по всем столбцам (по всей ширине автодороги), придаем введенной характеристике волнистости покрытия автодороги всеобщий (интегральный) характер

где  м2 - средняя оценка дисперсии высоты неровностей автодороги.
м2 - средняя оценка дисперсии высоты неровностей автодороги.
Наиболее целесообразным, с физической точки зрения, является ограничение вертикальной составляющей виброускорения, возникающего при движении по волнистой поверхности автодороги. Важным в такой постановке задачи является возможность связать скорость движения автомобиля с вертикальной составляющей виброускорения. Пусть автомобиль движется с постоянной продольной составляющей скорости по линиям качения левых и правых колес, определяемым соответственно j=µ и j=υ, тогда величина вертикальной составляющей виброскорости может быть определена следующим образом

где  тогда
тогда

Это соотношение позволяет вычислить значение вертикальной составляющей виброускорения

а с учетом соотношения (13) и предположения, что Хiµ-Хiµ-1=Хiµ-1-Х1µ-2, последнее выражение имеет вид

Поскольку вибрационная нагрузка на элементы конструкции автомобиля и пассажиров со стороны волнистой поверхности автодороги определяется именно величиной  , то необходимо определить условие ее ограничения
, то необходимо определить условие ее ограничения

где величина допустимого виброускорения wдоп является характеристикой автомобиля, численное значение которой определяется экспериментально из соображений безопасности и комфортности движения.
Выражение (14) и условие (15) позволяют наложить обоснованное ограничение на скорость движения автомобиля по ухабистой дороге, которое для левой линии соприкосновения колес с поверхностью автодороги имеет следующий вид

где  - допустимая скорость движения левой группы колес.
- допустимая скорость движения левой группы колес.
Для правой линий соприкосновения колес с поверхностью автодороги условие ограничения скорости имеет вид

где , - допустимая скорость движения правой группы колес.
Наименьшее значение из этих величин определяет допустимую скорость автомобиля по оцениваемому участку автодороги

Таким образом, задача определения неровностей поверхности автодороги, обнаружения препятствий и вычисления допустимой скорости движения автомобиля решается путем применения устройства для определения неровностей автодороги, а фактически бортовой системы технического зрения, включающей два разнесенных оптико-локационных блока и вычислителя.
Устройство для определения неровностей поверхности автодороги (фиг.2) содержит первый 1 и второй 2 оптико-локационные блоки, включающие каждый фотообъективы 4 и 6, а также плоские фотоматрицы 5 и 7, вычислитель 3, включающий модуль 8 обработки оцифрованного изображения поверхности автодороги, модуль 9 описания поверхности автодороги, модуль 10 оценки качества поверхности автодороги, модуль 11 определения препятствий и модуль 12 определения допустимой скорости движения.
Устройство работает следующим образом.
Излучение поверхности автодороги регистрирует плоская фотоматрица 5 первого ОЛБ 1 с помощью фотообъектива 4, а также плоская фотоматрица 7 второго ОЛБ 2 с помощью фотообъектива 6. В модуле обработки оцифрованного изображения поверхности автодороги 8, куда поступают оба оцифрованных изображения, осуществляется обработка изображений путем поочередного сравнения величин R - красный, G - зеленый, В - голубой всех пикселей плоской фотоматрицы 5 первого ОЛБ 1 с значениями величин R - красный, G - зеленый, В - голубой всех пикселей плоской фотоматрицы 7 второго ОЛБ 2, определяют коды координат идентичных точек и среди них отбирают идентичные точки, образующие прямоугольную сетку. В модуле 9 описания поверхности автодороги определяют координаты узлов сетки в системе координат, связанной с автомобилем, вычисляют координаты точек А, В, С путем осреднения координат двух столбцов и одной строки прямоугольной сетки и вычисляют высоту узлов прямоугольной сетки. В модуле 10 оценки качества поверхности автодороги вычисляют среднюю оценку дисперсии высоты неровностей автодороги. В модуле 11 определения препятствий определяют узлы сетки, высота которых превышает величину дорожного просвета автомобиля, и отождествляют их с препятствиями. В модуле 12 вычисления допустимой скорости автомобиля определяют допустимую скорость автомобиля на контролируемом участке автодороги.
Источники информации
1. Техническое зрение роботов. Под общ. ред. Ю.Г.Якушенкова. - М.: Машиностроение, 1990. - c.168-176.
2. Патент РФ на изобретение №2275652, кл. G01S /16, опубл. 10.06.2006, бюл. 200734 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2010 |
|
RU2422772C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2438142C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ПОДВИЖНОЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368920C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ МЕРЦАЮЩЕЙ ТОЧКИ ЗЕМНОЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383032C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И УГЛОВ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЧКИ АВИАНОСЦА И МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2408848C1 |
| СПОСОБ КОНТРОЛЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА НА ПОВОРОТЕ | 2009 |
|
RU2407032C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2401436C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ОТНОСИТЕЛЬНО ПУНКТИРНОЙ ЛИНИИ ДОРОЖНОЙ РАЗМЕТКИ | 2013 |
|
RU2530476C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВ ОТКЛОНЕНИЯ УПРАВЛЯЮЩИХ ПОВЕРХНОСТЕЙ ВЕДУЩЕГО САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2349931C1 |

Изобретение относится к системам, устанавливаемым на транспортных средствах, и может быть использовано для предупреждения столкновения транспортных средств с препятствиями. Способ заключается в измерении высоты неровностей в точках, выбранных в поле изображения автодороги, образующих прямоугольную сетку относительно плоскости, аппроксимирующей поверхность автодороги, задаваемой тремя точками. С препятствиями отождествляют узлы, высота которых превышает величину дорожного просвета автомобиля. Мерой качества автодороги принята средняя оценка дисперсии высоты неровностей, которая вычисляется при каждой фотоэкспозиции. Допустимая скорость автомобиля определяется из условия ограничения вертикальной перегрузки при движении по левой и правой линиям соприкосновения колес с поверхностью автодороги, при этом наименьшее значение скорости принимается в качестве допустимой скорости. Устройство содержит два разнесенных оптико-локационных блока и цифровой вычислитель. Цифровой вычислитель включает в себя модуль обработки оцифрованных изображений поверхности автодороги, модуль описания поверхности автодороги, модуль оценки качества поверхности автодороги, модуль определения препятствий, модуль определения допустимой скорости движения. Достигаемым техническим результатом является определение неровностей дороги и допустимой скорости движения по ней. 2 н.п. ф-лы, 2 ил.
1. Способ определения неровностей поверхности автодороги, заключающийся в использовании оптико-локационных блоков, каждый из которых содержит фотообъектив и фотоматрицу, а также вычислителя, отличающийся тем, что измерение высоты неровностей осуществляют относительно плоскости аппроксимирующей поверхность автодороги, задаваемой тремя точками А, В, С, осуществляют обработку оцифрованных изображений поверхности автодороги, снимаемых с двух разнесенных оптико-локационных блоков, установленных на автомобиле, выбирают в поле изображения mxn идентичных точек, образующих прямоугольную сетку, где m и n число узлов сетки по глубине и ширине, определяют координаты Yijυ, Zijυ, м, идентичных точек на изображениях поверхности автодороги, где первый индекс обозначает номер i=1…m узла, отсчитанный вдоль оси ОХ, второй индекс обозначает номер j=1…n узла, отсчитанный вдоль оси OZ, третий индекс обозначает номер υ=1, 2 фотоматрицы, по координатам Yijυ, Zijυ вычисляют координаты узлов сетки в системе координат, связанной с автомобилем,

 ,
,
 ,
,
где F - фокусное расстояние первого и второго фотообъективов, м;
В - расстояние между фотоматрицами, м,
вычисляют координаты точек А, В, С,

где µ и υ - значения индекса j=µ и j=υ, соответствующие линиям соприкосновения левых и правых колес автомобиля с дорожным покрытием, вычисляют высоту узлов выбранной сетки относительно плоскости аппроксимирующей поверхность автодороги, задаваемой точками А, В, С,
hij=(YA-Yij)Ny+(XA-Xij)Nx+(ZA-Zij)Nz,
где Nx=(YA-YB)(ZA-ZC)-(YA-YC)(ZA-ZB), Ny=(ZA-ZB)(XA-XC)-(XA-XB)(ZA-ZC), Nz=(XA-XB)(YA-YC)-(XA-XC)(YA-YB),
для всех i=1…m и j=1…n, посредством неравенства hij>hдп определяют узлы, высота которых превышает величину дорожного просвета автомобиля hдп, и отождествляют их с препятствиями, вычисляют среднюю оценку дисперсии высоты неровностей автодороги

определяют допустимую скорость автомобиля для левой и правой линий соприкосновения колес с поверхностью автодороги
 ,
,  ,
,
где Wдoп - допустимое виброускорение автомобиля,
определяют наименьшее значение этих величин как допустимую скорость автомобиля

2. Устройство для определения неровностей поверхности автодороги, включающее два разнесенных оптико-локационных блока, содержащих каждый фотообъектив и фотоматрицу, а также цифровой вычислитель, включающий блок определения координат источников излучения, которыми являются оптически неоднородные фрагменты покрытия автодороги, отличающееся тем, что два разнесенных оптико-локационных блока установлены на автомобиле, цифровой вычислитель дополнительно включает модуль обработки оцифрованных изображений поверхности автодороги, обеспечивающий нахождение идентичных точек, образующих прямоугольную сетку m×n, где m и n число узлов сетки по глубине и ширине, блок определения координат источников излучения представляет собой модуль описания поверхности автодороги, дополнительно обеспечивающий вычисление превышений узлов сетки, при этом модуль обработки оцифрованных изображений поверхности автодороги, в котором определяют координаты изображений идентичных точек в узлах сетки на фотоматрицах, своим первым и вторым входами связан с плоской фотоматрицей первого и плоской фотоматрицей второго оптико-локационных блоков, на которых с помощью фотообъектива первого и второго оптико-локационных блоков формируются изображения поверхности автодороги и определяются координаты идентичных точек в узлах сетки на первой и второй фотоматрицах, а своим выходом связан с входом модуля описания поверхности автодороги, где вычисляются координаты идентичных точек в узлах сетки, в системе координат связанной с автомобилем, выход модуля описания поверхности автодороги связан с входами модуля оценки качества поверхности автодороги, модуля определения препятствий, модуля определения допустимой скорости движения, при этом в модуле оценки качества поверхности автодороги вычисляется средняя оценка дисперсии высоты неровностей автодороги, в модуле определения препятствий осуществляется проверка превышения высоты узлов сетки над высотой дорожного просвета автомобиля и отождествление их препятствиям, в модуле определения допустимой скорости движения вычисляется допустимая скорость движения автомобиля на контролируемом участке автодороги.
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОСЛЕПЛЕНИЯ ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1993 |
|
RU2097223C1 |
| RU 2003113464 A, 10.11.2004 | |||
| RU 2066458 C1, 10.09.1996 | |||
| US 2008279422 A1, 13.11.2008 | |||
| JP 2008275606 A, 13.11.2008 | |||
| WO 2008114207 A2, 25.09.2008. | |||

