Изобретение относится к области информационно-измерительной техники и может быть использовано для построения распределенных информационно-измерительных и измерительно-управляющих систем с удаленным доступом к объектам исследования, средствам управления и измерения и систем автоматизированного лабораторного практикума с многопользовательским удаленным доступом.
Известен способ тестирования территориально удаленных объектов по патенту РФ №2406140, определяющий способ функционирования реализующей его распределенной измерительно-управляющей системы, который включает передачу подготовленного задания на тестирование объекта с персональной ЭВМ (ПЭВМ) пользователя через компьютерную сеть на сетевой сервер системы, запись его в очередь заданий других пользователей, передачу очередного задания из числа заданий в очереди с сетевого сервера на измерительно-управляющий сервер, сопряженный с тестируемым объектом, измерение под его управлением значений откликов объекта на выводимое тестовое воздействие и передачу результатов измерения через сетевой сервер на ПЭВМ пользователя.
Недостаток данного способа заключается в том, что решаемая им задача повышения пропускной способности распределенной измерительно-управляющей системы достигается только за счет оптимизации времени измерения без учета ее зависимости и от времени управления изменением состояния объекта.
Известны также способ обеспечения многопользовательского доступа к множеству удаленных устройств и реализующая его система, которая по решаемым ею задачам может быть отнесена к многопользовательским многообъектовым распределенным измерительно-управляющим системам (патент US 2005/0021712 A1, Jan/ 27, 2005 «Multi-user, multi-device remote access system»). В этом способе и системе под удаленными устройствами понимаются разного рода датчики (сенсоры) и приводы - исполнительные средства или механизмы, которые согласно своему функциональному назначению призваны изменять состояние или конфигурацию одного или множества объектов различной физической природы, т.е. осуществлять управление ими, а датчики системы должны выдавать информацию о параметрах и характеристиках объектов с целью их измерения, в том числе путем тестового воздействия на них. Группы удаленных устройств - датчиков и приводов подключаются каждая к своему универсальному контроллеру через индивидуальные модули расширения. Алгоритм функционирования системы для каждой группы удаленных устройств не предусматривает возможности параллельного во времени выполнения операций измерения и управления через датчики и приводы, подключенные к разным объектам, что увеличивает время обслуживания пользователей.
Наиболее близким к заявляемому по совокупности признаков является способ функционирования многопользовательской многообъектовой распределенной измерительно-управляющей системы, решающей задачи автоматизированного лабораторного практикума с удаленным доступом (Арбузов Ю.В., Маслов С.И., Воронков Э.Н. и др. Автоматизированный лабораторный практикум в системе открытого технического образования. Образовательная среда сегодня и завтра. Материалы Всероссийской научно-практической конференции. Москва. 29.09-02.10.2004. - РГИОО. - М.: Рособразование, 2004. - 272 с., или см.: Информатизация образования: направления, средства, технологии: Пособие для системы повышения квалификации / Под общ. ред. С.И.Маслова. - М.: Издательство МЭИ, 2004. - 868 с. (стр.488-501)). Эта система содержит клиентскую часть в виде территориально удаленных ПЭВМ пользователей, компьютерную сеть - в данном случае Интернет, через которую ПЭВМ пользователей соединены с сервером лабораторного стенда (далее сетевой сервер системы), и объектную часть, состоящую из одной и более объектных модулей (далее объектные подсистемы), каждый из которых включает микроконтроллер с подключенным к нему устройством аналого-цифрового интерфейса и один и более исследуемых объектов с подключенными к ним устройствами сопряжения, которые по шинам аналогового и цифрового ввода-вывода соединены с устройством аналого-цифрового интерфейса объектной подсистемы, а микроконтроллеры всех объектных подсистем соединены через локальную сеть с сетевым сервером системы.
Известный способ функционирования распределенной измерительно-управляющей системы включает подготовку на ПЭВМ пользователя задания на управление объектом и проведение измерений, передачу его через компьютерную сеть на сетевой сервер и запись в порядке поступления в очередь заданий других пользователей, передачу очередного задания на микроконтроллер объектной подсистемы, готовой к его исполнению, формирование с его помощью кодов управления на изменение состояния или конфигурации определяемого заданием объекта в составе объектной подсистемы, проведение операций управления объектом и измерения, в том числе по выводимому на объект тестовому сигналу, вывод результатов измерения с микроконтроллеров объектных подсистем на сетевой сервер и передачу их на ПЭВМ пользователей.
Этот способ обеспечивает возможность одновременного доступа к объектам, соответствующим разным объектным подсистемам. Однако в пределах одной объектной подсистемы возможны только последовательно выполняемые микроконтроллером объектной подсистемы операции управления и измерения с одним из входящих в ее состав объектов. Это ведет к снижению пропускной способности системы, так как во время работы с одним объектом в каждой объектной подсистеме другие ее объекты «простаивают».
Кроме того, в этой системе на микроконтроллер объектной подсистемы возлагаются достаточно сложные функции, связанные как с управлением, так и с измерениями, такие как формирование (синтез) тестовых сигналов (в ряде случаев достаточно сложной формы, например полигармонических, модулированных, случайных), первичная обработка результатов измерения, усреднение, прореживание и др. Эти задачи в общем случае решаются с помощью измерительно-управляющего сервера. Использование же микроконтроллера представляет один из возможных вариантов его практической реализации, что далее и полагается в материалах заявки.
В основу изобретения положена техническая задача повышения пропускной способности распределенной измерительно-управляющей системы с более чем одним объектом, подлежащим исследованию.
Поставленная задача решается тем, что в способе функционирования распределенной измерительно-управляющей системы, включающем подготовку на ПЭВМ пользователя задания на управление объектом и проведение измерений, передачу задания через компьютерную сеть на сетевой сервер и его запись в порядке поступления в очередь заданий других пользователей, передачу очередного задания на измерительно-управляющий сервер объектной подсистемы, готовой к его исполнению, формирование измерительно-управляющим сервером кодов управления на изменение состояния или конфигурации определяемого заданием объекта в составе объектной подсистемы, управление объектом, проведение измерений, в том числе по выводимым с измерительно-управляющего сервера тестовым сигналам, передачу результатов измерения с измерительно-управляющих серверов объектных подсистем на сетевой сервер и с него через компьютерную сеть на ПЭВМ пользователей, согласно изобретению, перед измерениями по очередному заданию на сетевом сервере анализируют следующее задание, относящееся к объекту той же объектной подсистемы, и при соответствии их разным объектам передают на измерительно-управляющий сервер этой объектной подсистемы следующее задание, при этом одновременно с операцией измерения по очередному заданию выполняют операцию управления по следующему заданию. Поставленная задача решается тем, что при превышении номинальным значением времени измерения по очередному заданию времени управления по следующему заданию, относящемуся к другому объекту, время измерения по очередному заданию уменьшают до значения, близкого к времени управления по следующему заданию, но не менее минимально допустимого для него значения. Поставленная задача решается тем, что очередь заданий на сетевом сервере разбивают на блоки, в пределах которых задания переставляют в последовательности, включающей наибольшее число сочетаний очередного и следующего за ним заданий, относящихся к разным объектам в составе одной объектной подсистемы. Поставленная задача решается тем, что очередь заданий на сетевом сервере разбивают на блоки, в пределах которых задания, относящиеся к одной объектной подсистеме, переставляют в последовательности, обеспечивающей минимальное время управления для перевода объектов из предыдущего состояния в новое состояние.
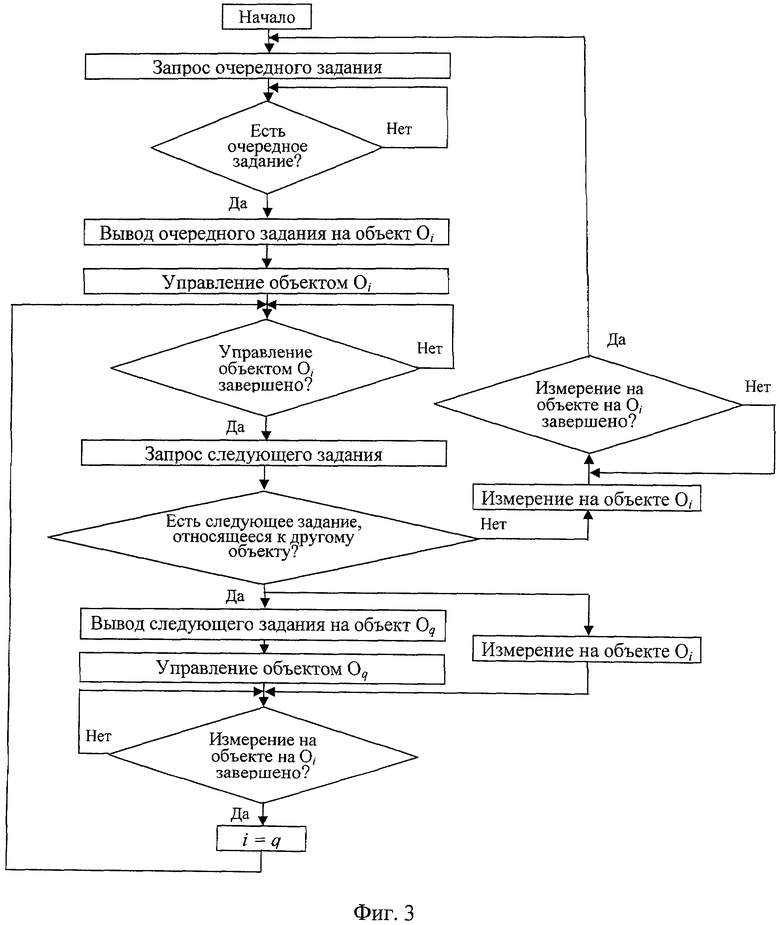
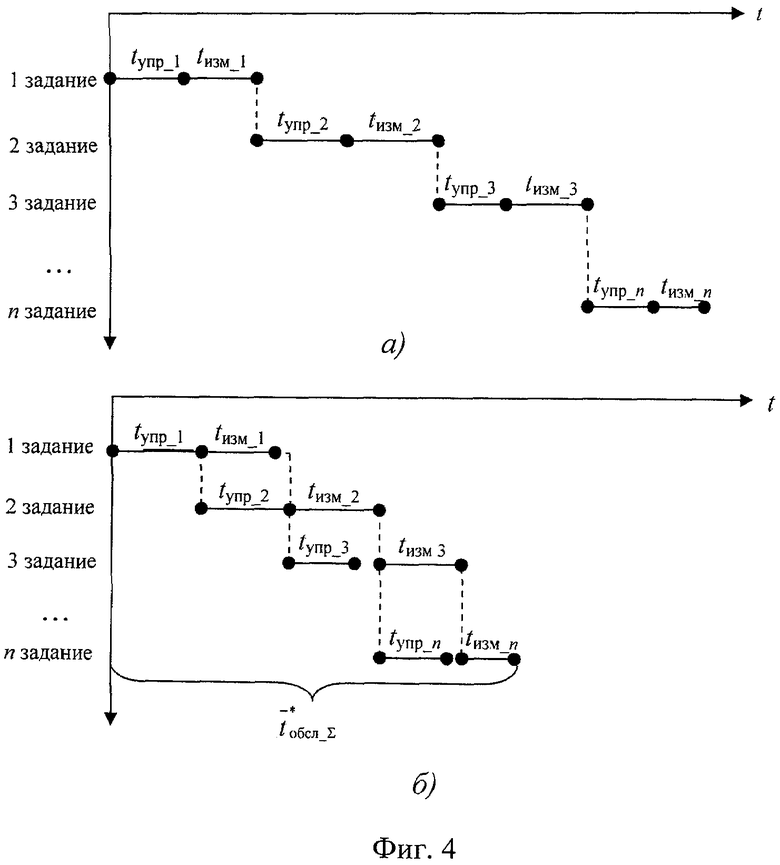
На фиг.1 приведена структурная схема распределенной измерительно-управляющей системы, функционирование которой реализуется по заявляемому способу. На фиг.2 показаны структурные схемы возможных вариантов реализации устройств выбора объектов управления (с элементами исполнительных устройств) (фиг.2, а) и устройств выбора объектов измерения (с элементами устройств согласования сигналов) (фиг.2, б). На фиг.3 представлена граф-схема алгоритма функционирования распределенной измерительно-управляющей системы, а на фиг.4 - временные диаграммы, иллюстрирующие ее работу.
Распределенная измерительно-управляющая система (фиг.1) содержит m ПЭВМ пользователей 11, 12, …, 1m, соединенных через компьютерную сеть 2 с сетевым сервером 3. К сетевому серверу 3 подключена объектная подсистема (одна или более), которая включает измерительно-управляющий сервер 4, соединенный с сетевым сервером 3, а также устройство аналогового ввода-вывода (УАВВ) 5 и устройство цифрового ввода-вывода (УЦВВ) 6, через которые измерительно-управляющий сервер 4 соединен соответственно с шиной аналогового ввода-вывода (ШАВВ) 7 и с шиной цифрового ввода-вывода (ШЦВВ) 8. К шине цифрового ввода-вывода 8 подключены k исполнительных устройств (ИУ) 91, …, 9k (по числу k объектов в составе объектной подсистемы), k устройств выбора объекта управления (УВО-У) 101, …, 10k и k устройств выбора объекта измерения (УВО-И) 111, …, 11k. К шине аналогового ввода-вывода 7 подключены к устройств согласования сигналов (УСС) 121, …, 12k, которые, как и исполнительные устройства 91, …, 9k соединены с соответствующими объектами 131, …, 13k. Устройства выбора объекта управления 101, …, 10k выходами соединены с соответствующими исполнительными устройствами 91, …, 9k, а устройства выбора объекта измерения 111, …, 11k выходами соединены с соответствующими устройствами согласования сигналов 121, …, 12k.
При этом каждое из устройств выбора объекта управления 10 с элементами исполнительных устройств 9 (фиг.2, а) включает регистры адреса объекта (РгАО-У) 14, к выходам которых подключены первыми входами схемы сравнения кодов (ССК-У) 15, вторые входы которых связаны с линиями адреса объекта управления шины цифрового ввода-вывода 8. Потенциальный выход схем сравнения кодов 15 соединен с входом записи регистров управления (Рг У) 16 и входом выбора буферов состояния (БС) 17, которые входят в состав исполнительных устройств 9, как и датчики состояния объекта (ДС) 18, которые соединены с буферами состояния 17 и импульсным выходом схем сравнения кодов 15. Каждое из устройств выбора объекта измерения 11 с элементами устройств согласования сигналов 12 (фиг.2, б) включает регистры адреса объекта (РгАО-И) 19, к выходам которых подключены первыми входами схемы сравнения кодов (ССК-И) 20, вторые входы которых связаны с линиями адреса объекта измерения шины цифрового ввода-вывода 8. Потенциальный выход схем сравнения кодов 20 соединен со входом управления коммутаторов 21, которые входят в состав устройств согласования сигналов 12.
Функционирование распределенной измерительно-управляющей системы по заявляемому способу рассмотрим на примере распределенной измерительно-управляющей системы с одной объектной подсистемой, включающей в себя более одного объекта, подлежащего исследованию.
Способ функционирования распределенной измерительно-управляющей системы осуществляется следующим образом.
С персональной ЭВМ пользователя 11, 12, …, 1m через компьютерную сеть 2 на сетевой сервер 3 передают представленные в цифровом виде задания на управление и измерения, относящиеся к объектам 131, …, 13k, которые записываются в формируемую сетевым сервером 3 очередь заданий пользователей в порядке их поступления. В задании указываются номер i (i=1, 2, …, k) объекта 13 (13i), параметры управления им (параметры настройки объекта), вид и параметры тестового воздействия (сигнала), выводимого на объект.
Очередное из поступивших на сетевой сервер 3 заданий (первое в очереди), относящееся к i-му объекту 13i в составе готовой к исполнению задания объектной подсистемы, передается на измерительно-управляющий сервер 4 этой объектной подсистемы. В соответствии с заданием с помощью измерительно-управляющего сервера 4 формируются адрес объекта управления и измерения, коды управления на изменение его состояния или конфигурации и тестовый сигнал для измерений. По адресу объекта управления и кодам управления выполняется управление объектом 13i, изменяющее его состояние или конфигурацию. Согласно заявленному способу перед измерениями по очередному заданию измерительно-управляющим сервером 4 формируется запрос на сетевой сервер 2 о готовности соответствующей ему объектной подсистемы к исполнению следующего задания. Сетевым сервером 2 анализируется следующее задание, относящееся к объектам той же объектной подсистемы, и при соответствии его другому объекту (например, 13q, q≠i) это задание передается в измерительно-управляющий сервер 4. В соответствии с этим заданием с помощью измерительно-управляющего сервера 4 также формируются адрес объекта управления и измерения, коды управления им и тестовый сигнал для измерений. По сформированному адресу объекта и кодам управления одновременно с операцией измерения по очередному заданию выполняется операция управления другим объектом по следующему заданию.
Результаты измерения по очередному заданию непосредственно или после дополнительной обработки передаются с измерительно-управляющего сервера 4 через сетевой сервер 3 и компьютерную сеть 2 на ПЭВМ пользователя 1, с которой поступило это задание. После выполнения операций измерения по очередному и управления по следующему заданиям, относящимся к разным объектам, следующее задание становится очередным.
Функционирование распределенной измерительно-управляющей системы осуществляется аналогичным образом и далее.
В случае, когда следующее задание относится к тому же объекту, что и очередное, то к его исполнению переходят после завершения операции измерения по очередному заданию, так как одновременно управление и измерения на одном и том же объекте не допустимы.
Формируемые измерительно-управляющим сервером 4 коды адреса объекта управления и измерения и коды управления объектом выводятся сервером 4 через устройство цифрового ввода-вывода 6 на шину цифрового ввода-вывода 8.
По коду адреса объекта управления срабатывает соответствующее выбираемому объекту 13 устройство выбора объекта управления 10 и формирует сигнал записи кодов управления объектом, поступающих с измерительно-управляющего сервера 4 в исполнительное устройство 9, где они преобразуются в последовательность управляющих воздействий на объект 13 в соответствии с его физической природой, которые изменяют состояние объекта 13 или его конфигурацию (например, с помощью ключей или реле). О завершении управления объектом измерительно-управляющий сервер 4 информируется активным уровнем сигнала с выхода состояния исполнительного устройства 9.
По коду адреса объекта измерения срабатывает соответствующее устройство выбора объекта измерения 11 и управляет устройством согласования сигналов 12, разрешая передачу через него аналоговых сигналов на объект 13 (тестовых сигналов и откликов) через шину аналогового ввода-вывода 7 и устройство аналогового ввода-вывода 5, сопряженное с измерительно-управляющим сервером 4.
Сравнение выставляемых на шину цифрового ввода-вывода 8 кодов адреса объекта управления в устройстве выбора объекта управления 10 и адреса объекта измерения в устройстве выбора объекта измерения 11 с кодами адресов соответствующих им объектов, хранящихся в соответствующих регистрах 14, 19 адреса объекта, осуществляется с помощью соответствующих схем сравнения кодов 15 и 20 (фиг.2, а, б).
При совпадении адреса объекта управления в устройстве выбора объекта управления 10 активным уровнем сигнала, формируемым на потенциальном выходе схемы сравнения кодов 15, разрешается запись кодов управления в регистр управления 16 и осуществляется выбор буфера состояния 17, а импульсом, возникающим на импульсном выходе схемы сравнения кодов 15, осуществляется сброс датчика состояния 18 объекта. После завершения операции управления объектом датчик состояния 18 устанавливается исполнительным устройством 9 в активное состояние, которое с инверсией передается на буфер состояния 17 и через шину цифрового ввода-вывода 8 считывается измерительно-управляющим сервером 4 (или вызывает аппаратное прерывание его). По получении сигнала состояния с буфера состояния 17, подтверждающего готовность объекта 13 к измерениям, измерительно-управляющий сервер 4 снимает адрес этого объекта с линий адреса объекта управления. В результате буфер состояния 17 отключается (логически или гальванически) от шины цифрового ввода-вывода 8.
В качестве буферов состояния 17 могут быть использованы инверторы с открытым коллектором, образующие схему «Монтажное ИЛИ» (с активным уровнем логического нуля), или логические элементы, имеющие третье высокоимпедансное состояние.
При совпадении адреса объекта измерения в устройстве выбора объекта измерения 11 по формируемому на потенциальном выходе схемы сравнения кодов 20 активному уровню сигнала замыкаются электронные ключи коммутатора 21 устройства согласования сигналов 12, соединяющие аналоговый вход-выход объекта 13 с шиной аналогового ввода-вывода 7 и через устройство аналогового ввода-вывода 5 - с измерительно-управляющим сервером 4. С некоторой задержкой на время переключения с измерительно-управляющего сервера 4 выводится через устройство аналогового ввода-вывода 5 и шину аналогового ввода-вывода 7 на устройство согласования сигналов 12 и объект 13 предварительно синтезированный тестовый сигнал с параметрами, соответствующими выполняемому заданию. Одновременно с устройства согласования сигналов 12 через шину аналогового ввода-вывода 7 и устройство аналогового ввода-вывода 5 в измерительно-управляющий сервер 4 вводятся измеренные (оцифрованные) значения отклика объекта 13 с одной или нескольких точек съема. После завершения измерительно-управляющим сервером 4 операции измерения адрес этого объекта снимается сервером 4 с линий адреса объекта измерения, отключая устройство согласования сигналов 12 от шины аналогового ввода-вывода 7.
Устройства согласования сигналов 12 выполняют функции измерительных преобразователей и датчиков, обеспечивая электрическое согласование сигналов или преобразуя их в сигналы неэлектрической природы (и обратно) в зависимости от вида объекта.
Приведение распределенной измерительно-управляющей системы в исходное состояние обеспечивается установкой неактивных уровней сигналов на выходах устройства цифрового ввода-вывода 6 при включении системы или с помощью измерительно-управляющего сервера 4. В результате выключаются буферы состояния 17 исполнительных устройств 9, связанные с линией ввода состояния объекта, и размыкаются ключи коммутаторов 21, отключающие устройства согласования сигналов 12 от шины аналогового ввода-вывода 7.
Заявляемый способ функционирования распределенной измерительно-управляющей системы иллюстрируется также граф-схемой алгоритма работы системы (фиг.3) и временными диаграммами (фиг.4).
Граф-схема алгоритма работы системы (фиг.3) отображает операции и их последовательность, которые описаны выше на основе фиг.1, 2.
На фиг.4, а показана временная диаграмма, когда эксперименты с объектами выполняются поочередно, без распараллеливания операций управления и измерения для очередного и следующего заданий.
На временной диаграмме фиг.4, б задания выполняются в соответствии с заявляемым способом с распараллеливанием операций управления и измерения для очередного и следующего заданий, относящихся к разным объектам. Аппаратно это поддерживается использованием раздельных устройств выбора объекта управления 10 и устройств выбора объекта измерения 11.
Каждый объект 13i характеризуется своим временем управления (временем настройки или конфигурирования) tупрi и временем измерения tизмi. Их значения и соотношения могут быть различны для разных объектов и для одного и того же объекта в зависимости от исходного состояния объекта и состояния, в которое он переводится, и содержания задания на измерения.
Из диаграмм фиг.4,а,б уже на качественном уровне виден выигрыш по времени выполнения заданий в соответствии с заявляемым способом функционирования системы и алгоритмом ее работы фиг.3, что означает повышение пропускной способности распределенной измерительно-управляющей системы (числа выполняемых заданий в единицу времени).
Приведем количественную оценку повышения пропускной способности системы.
При функционировании этой распределенной измерительно-управляющей системы без распараллеливания операций управления и измерения для очередного и следующего заданий, относящихся к разным объектам, среднее время обслуживания (выполнения задания) для n имеющихся в очереди заданий определяется выражением

где 
 среднее по n заданиям время операций управления и измерения соответственно.
среднее по n заданиям время операций управления и измерения соответственно.
При функционировании распределенной измерительно-управляющей системы с распараллеливанием операций управления и измерения для очередного и следующего заданий, относящихся к разным объектам, это время находится как

Введем обозначения  и
и  Используя (1), (2), получаем общее выражение для отношения среднего времени обслуживания задания без распараллеливания (в числителе) и с распараллеливанием (в знаменателе) операций управления и измерения для очередного и следующего заданий, относящихся к разным объектам:
Используя (1), (2), получаем общее выражение для отношения среднего времени обслуживания задания без распараллеливания (в числителе) и с распараллеливанием (в знаменателе) операций управления и измерения для очередного и следующего заданий, относящихся к разным объектам:

После преобразований это выражение приводится к виду:
Например, для n=5 и l=1 выигрыш, определяемый сокращением среднего времени обслуживания, составляет
Сокращение среднего времени обслуживания приводит к повышению в R раз пропускной способности системы, т.е. к увеличению в R раз числа обслуживаемых заданий в единицу времени.
Эффективность способа зависит от соотношения времени управления и измерения l. Наибольший эффект достигается при l=1, когда обеспечивается максимально возможная степень распараллеливания рассмотренных функциональных операций. С увеличением числа заданий n в очереди, относящихся к разным объектам, выигрыш по пропускной способности при этом приближается к 2.
Повышение пропускной способности распределенной измерительно-управляющей системы достигается также, когда при превышении номинальным значением времени измерения по очередному заданию времени управления по следующему заданию, относящемуся к другому объекту, время измерения по очередному заданию уменьшают до значения, близкого к времени управления по следующему заданию (значение l приближают к единице), но не менее минимально допустимого для него значения. Осуществляется это сокращением числа циклов усреднения результатов многократных измерений, ограниченным допустимым снижением точности измерений при возрастающей их оперативности.
Также для решения поставленной задачи очередь заданий на сетевом сервере разбивают на блоки, в пределах которых задания переставляются в последовательности, включающей наибольшее число сочетаний очередного и следующего за ним заданий, относящихся к разным объектам. Именно при таком порядке заданий в очереди, как показано выше, обеспечивается в наибольшей мере распараллеливание во времени операций измерения и управления, сокращающее время выполнения (обслуживания) сформированного таким образом блока заданий.
Также для решения поставленной задачи очередь заданий на сетевом сервере разбивают на блоки, в пределах которых задания переставляются в последовательности, обеспечивающей минимальное время управления для перевода объектов из предыдущего состояния в новое состояние. В данном случае при определении порядка выполнения заданий в блоке анализируется дополнительно время управления, необходимое для перевода объектов из предыдущего состояния в новое состояние, при котором это время минимально, что также сокращает время выполнения (обслуживания) блока заданий. Это может быть, например, требуемое для изменения состояния объекта изменение (приращение) температуры или, например, число элементов коммутации (ключей), требующих последовательного переключения для изменения конфигурации объекта.
Подключение к сетевому серверу более чем одной объектной подсистемы может быть произведено через их измерительно-управляющие серверы с помощью используемых для этого локальных сетей (например, Ethernet). Функционирование других подключенных объектных подсистем в составе распределенной измерительно-управляющей системы осуществляется при этом параллельно во времени (при наличии в очереди заданий, относящихся к объектам, входящим в их состав) и в соответствии с описанным выше для одной из объектных подсистем.
Следует отметить, что в качестве устройств аналогового и цифрового ввода-вывода 5, 6 могут быть использованы промышленно выпускаемые устройства данного функционального назначения, непосредственно сопрягаемые с вычислительными средствами, и многофункциональные устройства ввода-вывода (устройства сбора данных), совмещающие функции аналогового и цифрового ввода-вывода (например, корпорации National Instruments). Ввод-вывод цифровых данных при этом может выполняться как в параллельном, так и в последовательном коде, что в целом не влияет на сущность изобретения.
Таким образом, благодаря распараллеливанию операций управления и измерения, относящихся к разным объектам в составе объектной подсистемы, приближению соответствующего им времени измерения к времени управления, выбору оптимального порядка выполнения заданий, разбиваемых на блоки, обеспечивается повышение пропускной способности при функционировании распределенной измерительно-управляющей системы с числом объектов системы более одного. При этом повышение пропускной способности системы достигается без существенного усложнения ее аппаратного обеспечения, что говорит о более эффективном функционировании распределенной измерительно-управляющей системы по заявляемому способу и о решении положенной в основу изобретения задачи.
Эффективность предлагаемого способа проверена с помощью моделирования на ЭВМ распределенной измерительно-управляюшей системы, функционирующей в соответствии с предлагаемым способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕСТИРОВАНИЯ ТЕРРИТОРИАЛЬНО УДАЛЕННЫХ ОБЪЕКТОВ | 2009 |
|
RU2406140C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАСПРЕДЕЛЕННЫХ ИЗМЕРИТЕЛЬНО-УПРАВЛЯЮЩИХ СИСТЕМ | 2011 |
|
RU2468420C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ РАСПРЕДЕЛЕННЫХ ИЗМЕРИТЕЛЬНО-УПРАВЛЯЮЩИХ СИСТЕМ | 2014 |
|
RU2575410C2 |
| РАСПРЕДЕЛЕННАЯ ИЗМЕРИТЕЛЬНО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2015 |
|
RU2620596C1 |
| Система испытаний земных станций спутниковой связи | 2017 |
|
RU2681516C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ИСПЫТАНИЙ ЗЕМНЫХ СТАНЦИЙ СПУТНИКОВОЙ СВЯЗИ | 2018 |
|
RU2695539C1 |
| Устройство измерения частотных характеристик группового времени запаздывания четырехполюсников | 1988 |
|
SU1631511A1 |
| РАСПРЕДЕЛЕННАЯ АРХИТЕКТУРА СИСТЕМЫ ВИДЕОМОНИТОРИНГА ЛЕСА | 2013 |
|
RU2554102C2 |
| Калибратор фазы | 1982 |
|
SU1048424A1 |
| Универсальная объектно-ориентированная мультиплатформенная система автоматической диагностики и мониторинга для управления состоянием и предупреждения аварий оборудования опасных производственных и транспортных объектов | 2019 |
|
RU2728167C1 |

Изобретение относится к области информационно-измерительной техники и может быть использовано для построения распределенных информационно-измерительных и измерительно-управляющих систем с удаленным доступом к объектам исследования, средствам управления и измерения с многопользовательским удаленным доступом. Технический результат - повышение пропускной способности распределенной измерительно-управляющей системы с более чем одним объектом, подлежащим исследованию. Указанный технический результат достигается за счет сокращения среднего времени обслуживания пользователей путем распараллеливания во времени операций управления и измерения по очередному и следующему заданиям, относящимся к разным объектам. 3 з.п. ф-лы, 4 ил.
1. Способ функционирования распределенной измерительно-управляющей системы, включающий подготовку на ПЭВМ пользователя задания на управление объектом и проведение измерений, передачу задания через компьютерную сеть на сетевой сервер и его запись в порядке поступления в очередь заданий других пользователей, передачу очередного задания на измерительно-управляющий сервер объектной подсистемы, готовой к его исполнению, формирование измерительно-управляющим сервером кодов управления на изменение состояния или конфигурации определяемого заданием объекта в составе объектной подсистемы, управление объектом, проведение измерений, в том числе по выводимым с измерительно-управляющего сервера тестовым сигналам, передачу результатов измерения с измерительно-управляющих серверов объектных подсистем на сетевой сервер и с него через компьютерную сеть на ПЭВМ пользователей, отличающийся тем, что перед измерениями по очередному заданию на сетевом сервере анализируют следующее задание, относящееся к объекту той же объектной подсистемы, и при соответствии их разным объектам передают на измерительно-управляющий сервер этой объектной подсистемы следующее задание, при этом одновременно с операцией измерения по очередному заданию выполняют операцию управления по следующему заданию.
2. Способ по п.1, отличающийся тем, что при превышении номинальным значением времени измерения по очередному заданию времени управления по следующему заданию, относящемуся к другому объекту, время измерения по очередному заданию уменьшают до значения, близкого к времени управления по следующему заданию, но не менее минимально допустимого для него значения.
3. Способ по п.1, отличающийся тем, что очередь заданий на сетевом сервере разбивают на блоки, в пределах которых переставляют задания в последовательности, включающей наибольшее число сочетаний очередного и следующего за ним заданий, относящихся к разным объектам в составе одной объектной подсистемы.
4. Способ по п.1, отличающийся тем, что очередь заданий на сетевом сервере разбивают на блоки, в пределах которых задания, относящиеся к одной объектной подсистеме, переставляют в последовательности, обеспечивающей минимальное время управления для перевода объекта из предыдущего состояния в новое состояние.
| МАСЛОВ С.И | |||
| Пособие для системы повышения квалификации | |||
| Информатизация образования: направления, средства, технологии | |||
| - М.: МЭИ, 2004, [он-лайн], [Найдено 14.11.2012] | |||
| Стенд для испытания электростартеров двигателя внутреннего сгорания | 1978 |
|
SU775651A1 |
| US 7505891 B2, 17.03.2009 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| КОМПЛЕКСНЫЙ АВТОМАТИЗИРОВАННЫЙ МЕХАНИЗМ "ДРЕНАЖ" ДИСТАНЦИОННОЙ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ ПЕРСОНАЛА РАСПРЕДЕЛЁННОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕЙ СИСТЕМЫ, ОСНАЩАЕМЫЙ МАШИНОЧИТАЕМЫМИ НОСИТЕЛЯМИ ИНФОРМАЦИИ ДЛЯ ХРАНЕНИЯ БИБЛИОТЕКИ СМЕННЫХ ПРОГРАММНЫХ МОДУЛЕЙ И БАЗЫ ДАННЫХ О МОДЕЛЯХ СПЕЦИАЛИСТОВ, ЗНАНИЯХ, УМЕНИЯХ, НАВЫКАХ ОБУЧАЕМЫХ, СЦЕНАРИЯХ И РЕЗУЛЬТАТАХ ПОДГОТОВКИ | 2004 |
|
RU2248612C1 |

