о ю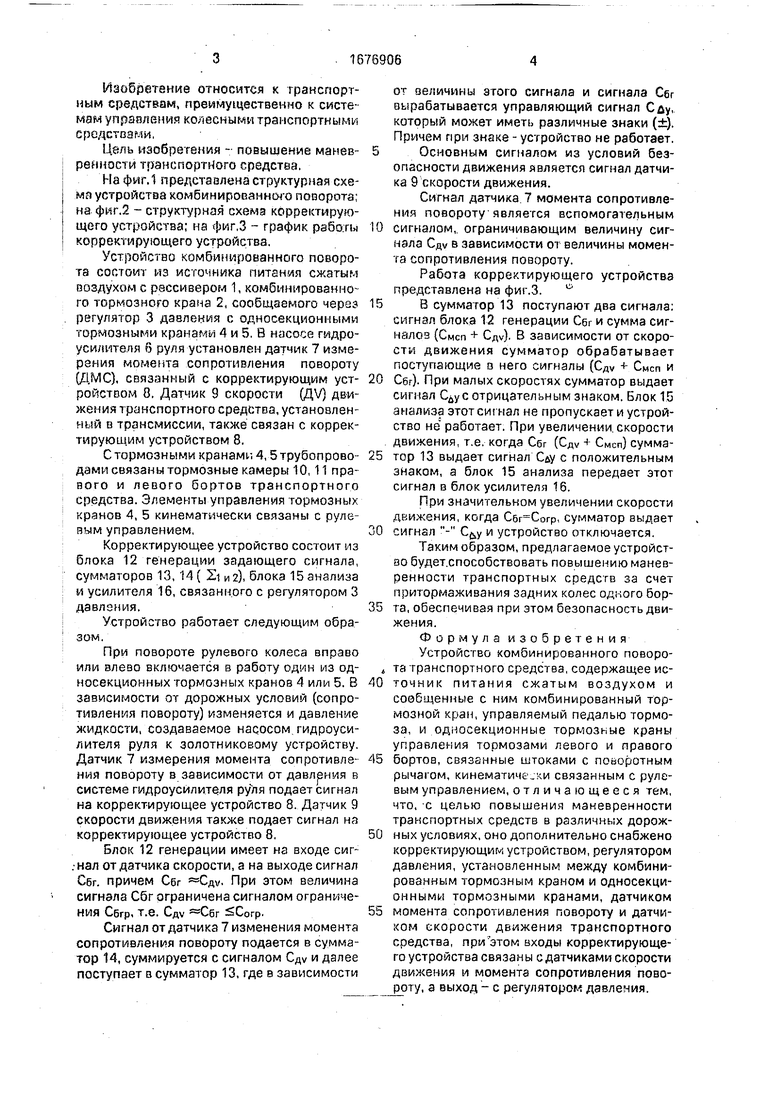
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления колесным транспортным средством | 1985 |
|
SU1316900A1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2019 |
|
RU2734153C1 |
| МНОГОДВИГАТЕЛЬНОЕ ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ (ВАРИАНТЫ) | 2012 |
|
RU2513360C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2836312C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КОЛЕБАНИЯМИ И СИСТЕМА УПРАВЛЕНИЯ КОЛЕБАНИЯМИ | 2016 |
|
RU2637079C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ОДНОМЕСТНЫЙ САМОЛЕТ С КОМПЛЕКСНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2016 |
|
RU2630030C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
Изобретение относится к транспортным средствам, преимущественно к системам управления колесными транспортными средствами. Цель изобретения - повышение маневренности транспортных средств. Устройство включает узлы и приборы тормозной системы и рулевого управления транспортного средства. Для обеспечения комбинированного поворота используется односекционные тормозные краны 4 и 5 управления тормозами левого и Правого борта, связанные с рулевым управлением. Скорость движения и момент сопротивления повороту отслеживаются датчиками 7 и 9, сигналы которых через корректирующее устройство 8 подаются на регулятор давления 3, посредством которого формируются необходимое давление торможения колес одного борта. 3 ил
о
фие.1
Изобретение относится к транспортным средствам, преимущественно к системам управления колесными транспортными средствами,
Цель изобретения - повышение маневренности транспортного средства.
На фиг. 1 представлена структурная схема устройства комбинированного поворота; на фиг.2 - структурная схема корректирующего устройства; на х|)иг,3 - график работы корректирующего устройства.
Устройство комбинированного поворота состоит из источника питания сжатым воздухом с рвссивером 1, комбинированного тормозного крана 2, сообщаемого чераз регулятор 3 давления с односекционными тормозными кранами 4 и 5. В насосе гидроусилителя 8 руля установлен датчик 1 измерения момента сопротивления повороту (ДМС), связанный с корректирующим устройством 8. Датчик 9 скорости (ДУ) движения т ранспортного средства, установленный в трансмиссии, также связан с корректирующим устройством 8.
С тормозными кранами 4,5 трубопрово дами связаны тормозные камеры 10,11 правого и левого бортов транспортного средства. Элементы управления тормозных кранов 4, 5 кинематически связаны с рулевым управлением,
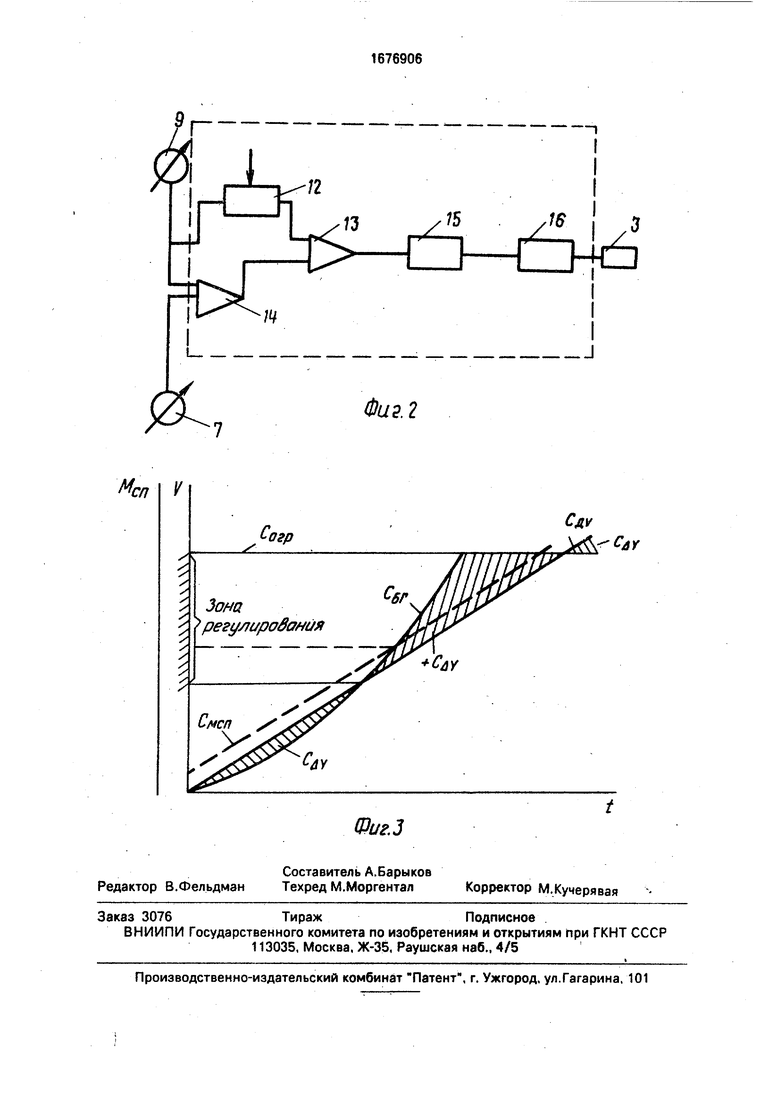
Корректирующее устройство состоит из блока 12 генерации задающего сигнала, сумматоров 13, 14 ( Zi и 2), блока 15 анализа и усилителя 16, связанного с регулятором 3 давления.
Устройство работает следующим образом,
При повороте рулевого колеса вправо или влево включается в работу один из од- носекционных тормозных кранов 4 или 5. В зависимости от дорожных условий (сопро- тиэления повороту) изменяется и давление жидкости, создаваемое насосом гидроусилителя руля к золотниковому устройству. Датчик 7 измерения момента сопротивления повороту в зависимости от давления в системе гидроусилителя руля подает сигнал на корректирующее устройство 8. Датчик 9 скорости движения также подает сигнал на корректирующее устройство 8,
Блок 12 генерации имеет на входе сиг- .нал отдатчика скорости, а на выходе сигнал Сбг. причем Сбг Сду. При этом величина сигнала Сбг ограничена сигналом ограничения Сбгр, т.е. Сду Сбг :ЈСогр.
Сигнал отдатчика 7 изменения момента сопротивления повороту подается в сумматор 14, суммируется с сигналом Сду и далее поступает в сумматор 13, где в зависимости
от величины згого сигнала и сигнала Сбг вырабатывается управляющий сигнал Сиу, который может иметь различные знаки (±). Причем при знаке - устройство не работает.
Основным сигналом из условий безопасности движения является сигнал датчика 9 скорости движения.
Сигнал датчика 7 момента сопротивления повороту является вспомогательным
0 сигналом, ограничивающим величину сигнала Cftv в зависимости от величины момента сопротивления повороту.
Работа корректирующего устройства представлена на фиг.З. °
5 В сумматор 13 поступают два сигнала: сигнал блока 12 генерации Сбг и сумма сиг- налоз (Смсп + Сду}. В зависимости от скорости движения сумматор обрабатывает поступающие а него сигналы (СДу + Смсп и
0 Сбг). При малых скоростях сумматор выдает сигнал Слу с отрицательным знаком. Блок 10 анализа этот еж мал не пропускает и устройство не работает. При увеличении скорости движения, т.е. когда Сбг (СДу -i Смсп) сумма5 тор 13 выдает сигнал Сду с положительным знаком, а блок 15 анализа передает этот сигнал в блок усилителя 16.
При значительном увеличении скорости движения, когда , сумматор выдает
0 сигнал - и устройство отключается.
Таким образом, предлагаемое устройство будет способствовать повышению маневренности транспортных средств за счет притормаживания задних колес одного бор5 та, обеспечивая при этом безопасность движения.
Формула изобретения Устройство комбинированного поворо- t та транспортного средства, содержащее ис0 точник питания сжатым воздухом и сообщенные с ним комбинированный тормозной кран, управляемый педалью тормоза, и односекционные тормозные краны управления тормозами левого и правого
5 бортов, связанные штоками с поворотным рычагом, кинематиче.чи связанным с рулевым управлением, отличающееся тем, что, с целью повышения маневренности транспортных средств в различных дорож0 ных условиях, оно дополнительно снабжено корректирующим устройством, регулятором давления, установленным между комбинированным тормозным краном и односекци- онными тормозными кранами, датчиком
5 момента сопротивления повороту и датчиком скорости движения транспортного средства, при этом входы корректирующего устройства связаны с датчиками скорости движения и момента сопротивления повороту, а выход - с регулятором давлечия.
Согр
х t
X X X X X X X X X X X X X X
Зона регулирования
-4Y
Фиг. 2
| Система управления колесным транспортным средством | 1985 |
|
SU1316900A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
