Изобретение относится к радиотехнике, а именно к радиолокационным методам определения скорости движущегося объекта, и может быть использовано в радиолокации, для прогнозирования положения движущейся цели или для селекции движущихся целей. Кроме того, изобретение может быть использовано в полицейских измерителях скорости автомобилей.
Известен способ определения нерадиальной проекции скорости движущейся цели {Патент РФ №2367974 на изобретение «Способ определения нерадиальной проекции скорости движущейся цели}. Известный способ заключается в том, что с помощью двух передающих антенн, размещенных в разных точках пространства, движущаяся цель облучается двумя совмещенными по времени зондирующими сигналами с несущими частотами f1 и f2, отраженные от цели сигналы с частотами F1 и F2 принимаются приемником, определяется разность частот ΔFсигн=F1-F2, определяется величина VD по формуле:
 ,
,
где с - скорость света;  и
и  - единичные векторы, направленные на цель из точек расположения соответственно первой и второй передающих антенн;
- единичные векторы, направленные на цель из точек расположения соответственно первой и второй передающих антенн;
 - единичный вектор, направленный на цель из точки расположения приемной антенны;
- единичный вектор, направленный на цель из точки расположения приемной антенны;
VD - проекция скорости цели V на направление вектора D, определяемого по формуле:
 .
.
Недостатком известного способа является то, что для его применения необходимо обеспечить высокую степень когерентности зондирующих сигналов. Длина когерентности сигналов должна быть больше удвоенного расстояния от локационной системы до цели.
Техническим результатом предлагаемого изобретения является существенное снижение требований к когерентности сигналов.
Снижение требований к когерентности сигналов достигается за счет применения опорного сигнала и происходит следующим образом.
Как и при использовании известного способа, с помощью двух передающих антенн, размещенных в разных точках пространства, движущаяся цель облучается двумя совмещенными по времени зондирующими сигналами с несущими частотами f1 и f2.
Кроме того, цель облучают опорным сигналом, частота которого равна разности частот первого и второго зондирующих сигналов. Отраженные целью сигналы принимаются.
Если цель движется, то частоты F1 F2 и Fоп отраженных от цели и принятых сигналов отличаются от соответствующих частот f1, f2 и fоп=f1-f2.
Определяют вектор D и величину VD по формулам:
 ,
,
где с - скорость света;
 и
и  - единичные векторы, направленные на цель из точек расположения соответственно первой и второй передающих антенн;
- единичные векторы, направленные на цель из точек расположения соответственно первой и второй передающих антенн;
 - единичный вектор, направленный на цель из точки расположения передающей антенны опорного сигнала.
- единичный вектор, направленный на цель из точки расположения передающей антенны опорного сигнала.
Если в качестве приемной антенны используется антенна, излучающая зондирующий сигнал частоты f1, или антенна, излучающая зондирующий сигнал частоты f2, то  или
или  соответственно.
соответственно.
Если в качестве антенны, излучающей опорный сигнал, используется антенна, излучающая зондирующий сигнал частоты f1, или антенна, излучающая зондирующий сигнал частоты f2, то  или
или  соответственно.
соответственно.
Величина VD равна проекции вектора скорости цели V на направление вектора D.
На чертеже представлена векторная диаграмма, поясняющая использование предлагаемого в качестве изобретения способа. Обозначения на чертеже соответствуют:
A1 - передающая антенна, излучающая зондирующий сигнал частоты f1;
А2 - передающая антенна, излучающая зондирующий сигнал частоты f2;
Aпр - приемная антенна;
Aоп - передающая антенна опорного сигнала;
Ц - цель;
r1, r2 - векторы, начала которых находятся в точках расположения антенн A1 и A2, а концы - в точке расположения цели;
rпр - вектор, начало которого находится в точке расположения приемной антенны Aпр, а конец - в точке расположения цели;
rоп - вектор, начало которого находится в точке расположения передающей антенны опорного сигнала Aоп, а конец - в точке расположения цели;
 ,
,  ,
,  ,
,  - орты векторов r1, r2, rпр, rоп соответственно.
- орты векторов r1, r2, rпр, rоп соответственно.
Мгновенные значения фаз Ψ1(t), Ψ2(t) и Ψоп(1), отраженных от цели и принятых сигналов, зависят от расстояний r1, r2 и rоп от соответствующих передающих антенн до цели, а также от расстояния rпр от цели до приемной антенны:



где ψ01, ψ02 и ψ0оп - начальные фазы зондирующих сигналов частот f1, f2 и fоп.
Тогда:


Продифференцируем эти выражения полным образом по времени, учитывая, что при движении цели величины r1, r2 и rоп и rпр зависят от времени.


Учтем, что 


Тогда


Сократим предыдущие выражения на 2π и вычтем их друг из друга:

Учтем, что fоп=(f1-f2):

Введем обозначение:
 .
.
Тогда
- c((F1-F2)-Fоп)=VD=VD0|D|, где D0 - орт вектора D.
Учтем, что VD0 есть проекция вектора V на направление вектора D. Обозначив эту проекцию как VD, получим:

Величины частот f1 и f2 и их разность могут быть известны заранее или измерены с достаточной точностью. Точность определения величины (f1-f2) может быть повышена путем измерения непосредственно разности частот. Например, сигналы частот f1 и f2 могут быть преобразованы в сигнал разностной частоты с последующим измерением этой частоты. Возможно применение и других способов измерения разности частот зондирующих сигналов.
Величина (F1-F2) может быть определена путем измерения частот принимаемых сигналов с последующим вычислением их разности. Однако для повышения точности определения величины (F1-F2) целесообразно преобразовать принимаемые сигналы частот F1 и F2 в сигнал разностной частоты, с последующим измерением частоты преобразованного сигнала.
Из векторной диаграммы на чертеже и из выражения для вектора D видно, что вектор D является нерадиальным.
Опорный сигнал и зондирующие сигналы проходят разные пути.
Поэтому длина когерентности сигналов должна быть меньше попарных разностей хода сигналов. Разности хода зависят от расположения антенн и направления на цель. При всех направлениях на цель разности хода сигналов меньше наибольшего из попарных расстояний между передающими антеннами. Поэтому достаточной длиной когерентности сигналов является наибольшее из попарных расстояний между антеннами. Это расстояние значительно меньше, чем дальность действия радиолокационной системы.
Таким образом, по сравнению с известным способом определения нерадиальной проекции скорости, использование предлагаемого способа на несколько порядков уменьшает требования к длине когерентности используемых сигналов.
Из выражений для D и VD видно, что результат определения нерадиальной проекции скорости цели не зависит от положения приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 2012 |
|
RU2485543C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 2012 |
|
RU2486542C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ СКОРОСТИ ДВИЖУЩЕЙСЯ ЦЕЛИ | 2007 |
|
RU2367974C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 2012 |
|
RU2506607C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ ВЕКТОРА СКОРОСТИ ЦЕЛИ | 2012 |
|
RU2492504C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2383914C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2003 |
|
RU2251710C2 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2426167C1 |
| Система высокоточного локального 3D − позиционирования водных транспортных средств для навигации и маневрирования на опасных участках внутренних водных путей | 2021 |
|
RU2768244C1 |
Изобретение относится к радиотехнике, а именно к радиолокационным способам определения скорости движущегося объекта. Достигаемым техническим результатом является возможность определения нерадиальных проекций вектора скорости цели при низких требованиях к когерентности применяемых сигналов. Определение нерадиальных проекций вектора скорости позволяет однозначно определять как величину, так и направление вектора скорости. Изобретение может быть использовано как в радиолокации, так и в полицейских измерителях скорости автомобилей. 1 ил.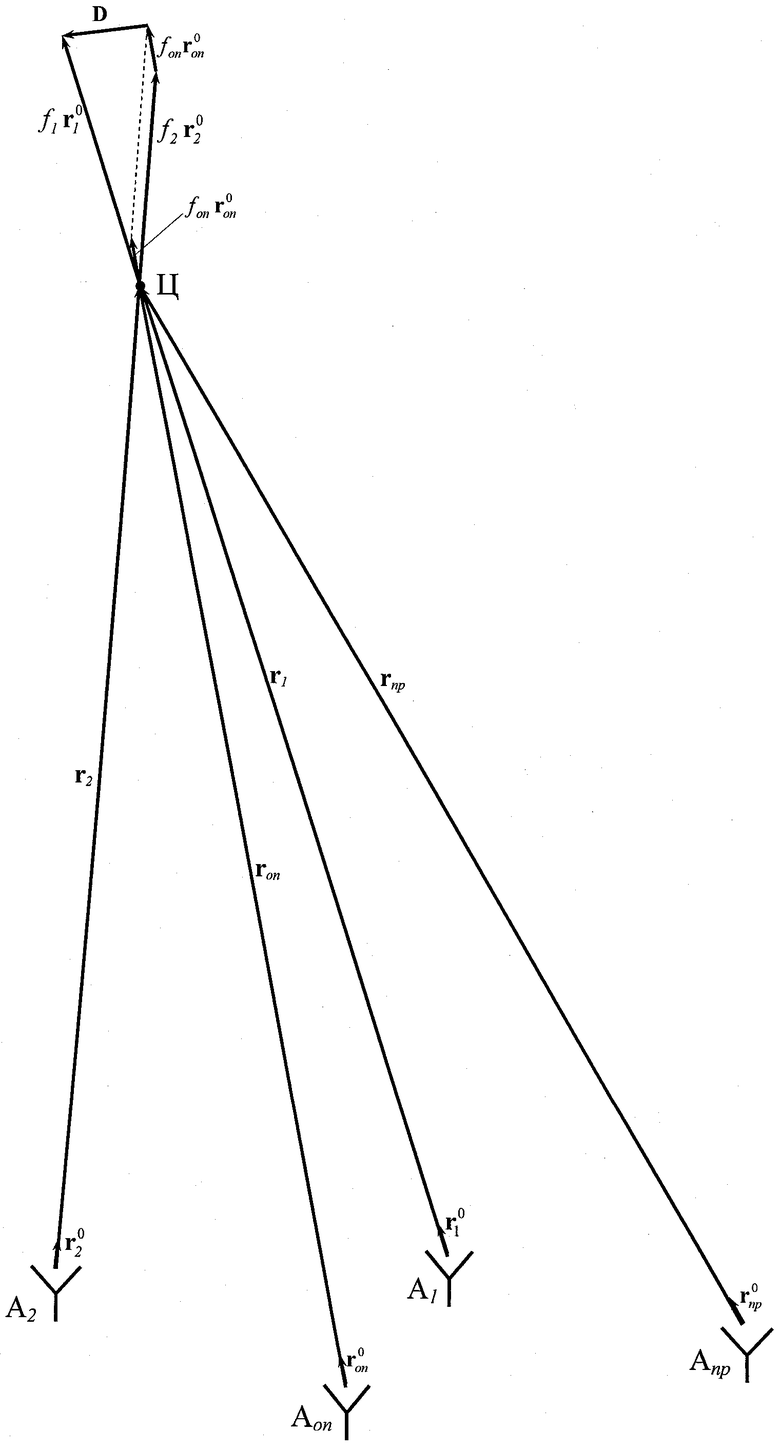
Способ определения нерадиальной проекции вектора скорости цели, заключающийся в том, что цель одновременно облучают с помощью двух разнесенных в пространстве антенн зондирующими сигналами двух различных частот, принимают отраженные целью сигналы, определяют разность частот принимаемых сигналов и по значению разности частот принимаемых сигналов определяют нерадиальную проекцию вектора скорости цели, отличающийся тем, что цель облучают дополнительным опорным сигналом, частота которого равна разности частот первого и второго зондирующих сигналов, отраженный опорный сигнал принимают, определяют частоту принимаемого опорного сигнала, и по формуле

определяют проекцию скорости цели на направление вектора D, определяемого по формуле

где с - скорость света;
f1 и f2 - частоты первого и второго зондирующих сигналов;
F1 и F2 - частоты принимаемых сигналов;
Fon - частота принимаемого опорного сигнала;
и - единичные векторы, направленные на цель из точек расположения соответственно первой и второй передающих антенн;
 , - единичный вектор, направленный на цель из точки расположения антенны, излучающей опорный сигнал.
, - единичный вектор, направленный на цель из точки расположения антенны, излучающей опорный сигнал.
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРАДИАЛЬНОЙ ПРОЕКЦИИ СКОРОСТИ ДВИЖУЩЕЙСЯ ЦЕЛИ | 2007 |
|
RU2367974C2 |
| СПОСОБ АВТОНОМНОГО ИЗМЕРЕНИЯ ВЕКТОРОВ СКОРОСТИ И УСКОРЕНИЯ | 2004 |
|
RU2331890C2 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| Способ определения тангенциальной составляющей скорости объекта | 1991 |
|
SU1809400A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ В ОБЗОРНЫХ РАДИОЛОКАТОРАХ ЗА СЧЕТ ИСПОЛЬЗОВАНИЯ КОГЕРЕНТНЫХ СВОЙСТВ ОТРАЖЕННЫХ СИГНАЛОВ | 2009 |
|
RU2416105C1 |
| US 4751511 A, 14.06.1988 | |||
| US 2011029875 A1, 01.12.2011 | |||
| EP 1185882 B1, 17.02.2010 | |||
| US 6828929 B2, 07.12.2004. | |||

