Изобретение относится к области радиолокационного обнаружения объектов и измерения параметров их движения в радиолокационных станциях (радиолокаторах), осуществляющих последовательный круговой обзор пространства.
Известен способ определения параметров движения воздушных объектов в обзорных радиолокаторах за счет использования когерентных свойств отраженных сигналов [1, с.303], основанный на выполнении следующих операций.
1. Прием отраженного сигнала от воздушного объекта (ВО) в процессе кругового обзора воздушного пространства, причем отраженный сигнал имеет вид:

где G[βво-β(tn)] - текущее значение характеристики направленности антенны (ХНА) в направлении на ВО в момент времени tn=nTи, n - номер периода повторения импульсов Ти радиолокатора, в котором осуществлен прием отраженного сигнала;  - число импульсов, принимаемых за один круговой обзор; int{·} - символ вычисления целого значения числа в фигурных скобках {·}; Тобз - период обзора пространства по азимуту, βво - истинный азимут воздушного объекта, находящегося на дальности rk=kΔr, т.е. находящегося в k-м
- число импульсов, принимаемых за один круговой обзор; int{·} - символ вычисления целого значения числа в фигурных скобках {·}; Тобз - период обзора пространства по азимуту, βво - истинный азимут воздушного объекта, находящегося на дальности rk=kΔr, т.е. находящегося в k-м  элементе разрешения по дальности Δr;
элементе разрешения по дальности Δr;  - текущее азимутальное положение максимума (центра) ХНА в момент времени tn; Vr - радиальная составляющая вектора скорости ВО; Vτ - тангенциальная составляющая вектора скорости ВО; I - число рассеивающих центров (РЦ) на поверхности ВО; i - номер РЦ
- текущее азимутальное положение максимума (центра) ХНА в момент времени tn; Vr - радиальная составляющая вектора скорости ВО; Vτ - тангенциальная составляющая вектора скорости ВО; I - число рассеивающих центров (РЦ) на поверхности ВО; i - номер РЦ  - комплексное значение аддитивной суммы внешних шумов (помех), внутренних шумов приемника и шумов квантования принятого сигнала в k-м элементе разрешения по дальности в момент времени tn; Ui - амплитуда отражения зондирующего сигнала от i-го РЦ; Ψi - фаза переотражения радиоимпульса от i-го РЦ в совокупности с начальной фазой излучения зондирующего сигнала; ti - время, учитывающее частную задержку сигнала при отражении от i-го РЦ поверхности ВО (учет разных наклонных дальностей до разных РЦ); верхний или нижний индекс «k» обозначает принадлежность параметра к k-му элементу разрешения по дальности.
- комплексное значение аддитивной суммы внешних шумов (помех), внутренних шумов приемника и шумов квантования принятого сигнала в k-м элементе разрешения по дальности в момент времени tn; Ui - амплитуда отражения зондирующего сигнала от i-го РЦ; Ψi - фаза переотражения радиоимпульса от i-го РЦ в совокупности с начальной фазой излучения зондирующего сигнала; ti - время, учитывающее частную задержку сигнала при отражении от i-го РЦ поверхности ВО (учет разных наклонных дальностей до разных РЦ); верхний или нижний индекс «k» обозначает принадлежность параметра к k-му элементу разрешения по дальности.
2. Регистрация квадратурных составляющих принятого сигнала, вычисление его комплексной формы и запись в оперативное запоминающее устройство (ОЗУ) радиолокатора.
3. Измерение времени запаздывания tз1 принятого сигнала (1) и определение дальности до ВО R1 при первом обзоре пространства по формуле
где с - скорость распространения радиоволн.
4. Определение дальности до ВО R2 при втором обзоре пространства и расчет значения радиальной скорости объекта по формуле

5. Вычисление величины изменения азимута Δβ, которое определяет разность двух угловых положений ВО при втором β2 и первом β1 обзорах пространства по формуле

6. Определение тангенциальной скорости Vτ ВО по вычисленным величинам Δβ, tз1 и tз2 (теорема косинусов):

7. Расчет полного вектора скорости (линейной скорости) ВО по формуле

8. Расчет курсового угла ВО по формуле

При этом точность оценки  радиальной скорости Vr движения ВО определяется выражением [2, с.278]
радиальной скорости Vr движения ВО определяется выражением [2, с.278]

где  τи - длительность зондирующего радиоимпульса; q - отношение сигнал/шум в приемном устройстве радиолокатора.
τи - длительность зондирующего радиоимпульса; q - отношение сигнал/шум в приемном устройстве радиолокатора.
Для траектории объекта, движущегося с ускорением при m равнодискретных и равноточных измерениях, точность оценки тангенциальной скорости движения Vτ можно определить по формуле [2, с.268-278]

Анализ представленных выражений показывает, что для получения приемлемой точности оценивания скоростных параметров движения ВО (радиальной и тангенциальной скорости) необходимо провести не менее 5-6 измерений дальности, что при круговом обзоре (обзоре пространства по азимуту) занимает продолжительное время. А при экономии времени на измерение точность оценок параметров движения становится низкой.
Для повышения точности определения параметров движения ВО при фиксированном времени обзора пространства и для уменьшения времени измерений при заданной точности оценки параметров движения был предложен усовершенствованный способ определения параметров движения ВО в обзорных радиолокаторах за счет использования когерентных свойств отраженных объектами сигналов [3].
Способ [3] заключается в том, что с помощью обзорного радиолокатора в процессе кругового азимутального сканирования ХНА излучают в пространство зондирующие сигналы, принимают отраженные воздушным объектом сигналы, регистрируют квадратурные составляющие принимаемых сигналов, вычисляют их комплексную форму, записывают квадратурные составляющие принятых сигналов в ОЗУ, определяют дальность до объекта при каждом обзоре пространства по формуле (2), формируют в ОЗУ N матриц опорных сигналов (МОС) Hn размером Р×L, элементы которых  рассчитывают по формуле
рассчитывают по формуле

где  - номер МОС, соответствующий номеру принятого в процессе обзора отраженного объектом сигнала; Nобз - количество принимаемых в процессе одного азимутального обзора отраженных объектом сигналов;
- номер МОС, соответствующий номеру принятого в процессе обзора отраженного объектом сигнала; Nобз - количество принимаемых в процессе одного азимутального обзора отраженных объектом сигналов;  и
и  - соответственно значения подбираемых расчетом радиальной и тангенциальной составляющих линейной скорости ВО Vво; {·} - знак множества; ΔVr и ΔVτ - величины шагов дискретизации расчетных радиальной
- соответственно значения подбираемых расчетом радиальной и тангенциальной составляющих линейной скорости ВО Vво; {·} - знак множества; ΔVr и ΔVτ - величины шагов дискретизации расчетных радиальной  и тангенциальной
и тангенциальной  составляющих линейной скорости ВО соответственно;
составляющих линейной скорости ВО соответственно;  - текущий номер для дискретного подбора
- текущий номер для дискретного подбора  ; L=Vr max/ΔVr - количество расчетных значений скорости ; Vr max - максимально возможное значение радиальной скорости ВО;
; L=Vr max/ΔVr - количество расчетных значений скорости ; Vr max - максимально возможное значение радиальной скорости ВО;  - текущий номер для дискретного подбора ; P=Vτ max/ΔVτ - количество расчетных значений скорости ; Vτ max - максимально возможное значение тангенциальной скорости ; умножают каждый элемент n-й МОС Hn на соответствующий n-й комплексный принятый сигнал; формируют матрицу результирующих сигналов (МРС) Нрез размером P×L путем суммирования одноименных (с равными индексами) элементов n-х МОС Hn после перемножения элементов
- текущий номер для дискретного подбора ; P=Vτ max/ΔVτ - количество расчетных значений скорости ; Vτ max - максимально возможное значение тангенциальной скорости ; умножают каждый элемент n-й МОС Hn на соответствующий n-й комплексный принятый сигнал; формируют матрицу результирующих сигналов (МРС) Нрез размером P×L путем суммирования одноименных (с равными индексами) элементов n-х МОС Hn после перемножения элементов  с величинами соответствующих (по номеру n) принятых сигналов
с величинами соответствующих (по номеру n) принятых сигналов  по формуле
по формуле

вычисляют квадрат модуля каждого элемента МРС Нрез, определяют в МРС Нрез номер строки p0 и столбца l0, которым соответствует наибольшее значение квадрата модуля его элемента, т.е. квадрата модуля содержащегося в этом элементе комплексного числа; рассчитывают радиальную и тангенциальную составляющие скорости воздушного объекта по формулам: Vr=ΔVrp0 и Vτ=ΔVτl0.
Указанный способ обеспечивает более высокие точностные характеристики измерения радиальной и тангенциальной составляющих скорости движения воздушных объектов, а также снижение времени для измерения Vr и Vτ. Однако ему свойственны следующие существенные недостатки.
1) Способ предполагает сложение N принятых в процессе обзора сигналов для каждого k-го элемента разрешения по дальности. Однако существенный вклад в процесс измерения вносят только те сигналы, которые получены при радиолокационном контакте с объектом главного лепестка ХНА, т.е. число N матриц опорных сигналов должно быть существенно меньшим, чем число импульсов, излучаемых за один оборот антенны. При использовании всех сигналов, полученных за обзор, оценка скорости будет искажена шумами и сигналами других объектов, находящихся на той же дальности, но на другом азимуте. Поэтому используемое способом число МОС должно быть уточнено и обосновано.
2) Способ предполагает измерение параметров ВО на всевозможных азимутах и дальностях, однако подход к предоставлению информации о разных объектах в способе не представлен, что противоречит назначению (задачам) обзорных радиолокаторов.
3) Способ предполагает предварительное обнаружение объектов и ложных сигналов, хотя потенциально сам способ в соответствии со своей логикой и возможностями способен одновременно проводить обнаружение объектов и измерение параметров их движения.
4) Составляющие скорости представленным способом будут определяться и для тех импульсных объемов пространства, где объектов нет, поскольку максимальное значение один из элементов МРС будет иметь всегда. Это ведет к необоснованной перегрузке вычислительной системы радиолокатора и может быть использовано только в том случае, если в результате расчетов будет дополнительно решена задача обнаружения ВО в пределах всего пространства.
5) Способ предполагает сложение комплексных сигналов, т.е. когерентное сложение сигналов с учетом фазы, игнорируя рассмотрение и учет фазовых сдвигов, обусловленных отражениями от вращающихся элементов двигательных установок ВО. Следовательно, способ является ограниченно работоспособным и эффективным лишь в отношении ВО, у которых вращающиеся элементы двигателей отсутствуют (например, снаряд, воздушный шар, ракета).
6) Способ учитывает наличие только положительных скоростей и их составляющих  и
и  Однако ВО бывают удаляющимися и приближающимися, а также движущимися влево и вправо относительно линии визирования. А радиолокатор нуждается в измерении любых из указанных скоростей, в том числе и отрицательных.
Однако ВО бывают удаляющимися и приближающимися, а также движущимися влево и вправо относительно линии визирования. А радиолокатор нуждается в измерении любых из указанных скоростей, в том числе и отрицательных.
7) Как в формуле, так и в описании прототипа [3] для дискретизации расчетных значений  и
и  используются переменные L и Р соответственно. Значит, расчет значений составляющих скорости ВО следовало бы проводить по формулам Vr=ΔVrl0 и Vτ=ΔVτp0, а не по формулам Vr=ΔVrp0 и Vτ=ΔVτl0, как указано в [3]. При использовании указанных в [3] формул оценки составляющих скорости будут неверными (ошибочными), подменяющими друг друга.
используются переменные L и Р соответственно. Значит, расчет значений составляющих скорости ВО следовало бы проводить по формулам Vr=ΔVrl0 и Vτ=ΔVτp0, а не по формулам Vr=ΔVrp0 и Vτ=ΔVτl0, как указано в [3]. При использовании указанных в [3] формул оценки составляющих скорости будут неверными (ошибочными), подменяющими друг друга.
Задачей изобретения является совершенствование способа определения параметров движения воздушных объектов в обзорных радиолокаторах (за счет использования когерентных свойств отраженных сигналов) в интересах:
обеспечения одновременного решения задач обнаружения объектов и измерения параметров их движения для всего объема воздушного пространства, примыкающего к радиолокатору;
одинаково эффективного измерения параметров движения объектов, содержащих и не содержащих двигательные установки с вращающимися элементами;
обеспечения измерения скоростей объектов во всем объективно существующем диапазоне их изменения.
Для решения поставленной задачи предлагается определить минимальное дополнительное количество используемых отраженных сигналов для каждого азимутального положения, осуществлять низкочастотную фильтрацию отраженных сигналов перед их обработкой согласно основному содержанию способа, а также предусмотреть сравнение величин измеренных составляющих скоростей Vr и Vτ для смежных азимутальных положений антенны.
Обозначим необходимое число суммируемых (когерентно складываемых) сигналов переменной G. Для определения величины G рассмотрим время радиолокационного контакта основного лепестка ХНА с ВО, которое назовем временем накопления Тн. Это время представляет собой отношение ширины Δθβ основного лепестка ХНА радиолокатора по азимуту к угловой скорости вращения антенны ωобз (в случае электронного сканирования - к угловой скорости перемещения луча ХНА в пространстве) при обзоре пространства

Тогда количество импульсов G, принимаемых за время контакта основного луча ХНА с ВО, можно определить по формуле

где int2{•} - символ проведения операции округления до ближайшего целого четного числа. Четность G востребована последующими операциями.
В типовых радиолокаторах обзора метрового диапазона ширина основного луча ХНА составляет величину порядка 8°, а период повторения импульсов Ти составляет единицы миллисекунд. Значит, для Ти=2,6 мс при скоростях вращения антенны 2, 4 или 6 оборотов в минуту (что соответствует периодам обзора Тобз 30, 15 и 10 с) за время Тн можно накопить соответственно 240, 120 или 85 импульсов.
Согласно предлагаемому способу для каждого n-го азимутального положения нормали антенны β(tn) требуется накопить и записать в память ОЗУ G импульсов. Если бы ВО находился в азимутальном положении β(tn), то есть в положении, которому соответствует положение нормали антенны при излучении n-го импульса, то пачка накапливаемых импульсов (всего их G) должна была бы начаться с импульса с номером (n-G/2), а заканчиваться она должна была бы импульсом с номером (n+G/2). Этими рассуждениями будем пользоваться для описания предлагаемого способа.
В соответствии с идеей предлагаемого способа все воздушное пространство, окружающее обзорный радиолокатор, предлагается разделить на дальностные и азимутальные элементы. Число дальностных элементов К определяется дальностью до ближней rб и дальней rд границ зоны обнаружения радиолокатора (фиг.1), а также величиной элемента разрешения по дальности Δr, что выражается зависимостью  . Число азимутальных элементов одного обзора Nобз определяется числом импульсов, излучаемых за один обзор: Nобз=int{Toбз/Tи}. Каждому азимутальному элементу соответствует свой n-й период излучения импульсов, т.е. свое время излучения tn. Поэтому текущее азимутальное положение нормали антенны в момент времени tn будем обозначать β(tn). На фиг.1 использованы следующие обозначения: 1 - точка расположения (стояния) радиолокатора; 2 - азимутальное положение антенны в момент времени tn; 3 - положение k-го элемента разрешения по дальности; 4 - диаграмма направленности антенны.
. Число азимутальных элементов одного обзора Nобз определяется числом импульсов, излучаемых за один обзор: Nобз=int{Toбз/Tи}. Каждому азимутальному элементу соответствует свой n-й период излучения импульсов, т.е. свое время излучения tn. Поэтому текущее азимутальное положение нормали антенны в момент времени tn будем обозначать β(tn). На фиг.1 использованы следующие обозначения: 1 - точка расположения (стояния) радиолокатора; 2 - азимутальное положение антенны в момент времени tn; 3 - положение k-го элемента разрешения по дальности; 4 - диаграмма направленности антенны.
В целях обеспечения одновременного обнаружения объектов и измерения параметров их движения предлагается, в первую очередь, оцифровать все сигналы, принятые в диапазоне изменения азимута от β[t(-G/2)] до  т.е. для (Nобз+G) азимутальных положений антенны. Для этого в каждом из периодов повторения импульсов (всего их в указанном диапазоне G+Nобз) после приема отраженных сигналов предлагается проводить согласованную обработку (фильтрацию) сигналов во всем интервале времени приема [4, 5, 6], т.е. с временами задержки, соответствующими интервалу дальности от rб до rд (фиг.1). Согласованная обработка может быть выполнена в аналоговом виде с помощью квазиоптимального фильтра или после перевода принятой реализации в цифровой вид путем свертки с комплексно-сопряженным оцифрованным зондирующим сигналом этого же периода [4, 5, 6]. Согласованная обработка должна заканчиваться низкочастотной фильтрацией огибающих отраженных сигналов. Назначение этой операции будет раскрыто ниже.
т.е. для (Nобз+G) азимутальных положений антенны. Для этого в каждом из периодов повторения импульсов (всего их в указанном диапазоне G+Nобз) после приема отраженных сигналов предлагается проводить согласованную обработку (фильтрацию) сигналов во всем интервале времени приема [4, 5, 6], т.е. с временами задержки, соответствующими интервалу дальности от rб до rд (фиг.1). Согласованная обработка может быть выполнена в аналоговом виде с помощью квазиоптимального фильтра или после перевода принятой реализации в цифровой вид путем свертки с комплексно-сопряженным оцифрованным зондирующим сигналом этого же периода [4, 5, 6]. Согласованная обработка должна заканчиваться низкочастотной фильтрацией огибающих отраженных сигналов. Назначение этой операции будет раскрыто ниже.
Вся последовательность принятой реализации в пределах периода повторения разделяется на элементы, соответствующие элементам разрешения по дальности Δr. В цифровом виде элементом разрешения по дальности является каждая точка (пиксель) в принятой реализации сигналов от rб до rд.
Затем для каждого из элементов разрешения по дальности Δr и для каждого из азимутальных положений β(tn) проводится регистрация квадратурных составляющих сигналов, вычисляется комплексная форма каждого сигнала и производится ее запись в ОЗУ радиолокатора по аналогии со способом-прототипом [3].
Далее проводятся операции, одинаковые для всех элементов разрешения по дальности, в связи с чем рассмотрим только один k-й элемент разрешения по дальности. Для k-го элемента разрешения по дальности (элемента дальности) из всего объема данных выделяется частный массив комплексных чисел длиной (Nобз+G), соответствующий различным азимутальным положениям ХНА в пределах рассматриваемого элемента разрешения по дальности, начиная с азимута β[t(-G/2)] и заканчивая азимутом 
Аналогично способу [3] заблаговременно для k-го элемента дальности составляют G матриц опорных сигналов  , где верхний индекс «k» указывает на соответствие k-му элементу дальности. Каждая такая g-я матрица
, где верхний индекс «k» указывает на соответствие k-му элементу дальности. Каждая такая g-я матрица  включает в себя P×L элементов
включает в себя P×L элементов  т.е.
т.е. 
где P=2Vτ max/ΔVτ,  , L=2Vr max/ΔVr,
, L=2Vr max/ΔVr,  ,
,
причем величины элементов матрицы рассчитываются по формуле

где rk - дальность, соответствующая рассматриваемому k-му элементу разрешения (rk=kΔr).
На фиг.2 представлен параллелограмм, каждый элемент (малый куб) которого соответствует одному из рассчитанных значений опорного сигнала для k-го элемента дальности. Вертикальный срез параллелограмма соответствует одной из формируемых матриц опорных сигналов. Всего существует G таких различных вертикальных срезов. Число строк в срезе равно Р, а число столбцов равно L. Из очевидных соображений ясно, что величины шагов ΔVr и ΔVτ должны быть равны, что определяет равенство P=L. Представленный на фиг.2 параллелограмм графически интерпретирует порядок формирования G матриц опорных сигналов  для k-го элемента дальности.
для k-го элемента дальности.
Предлагаемый способ призван формировать оценки  и
и  для каждого азимутального положения антенны βk(tn) в каждом k-м элементе дальности. Порядок получения оценок и следующий.
для каждого азимутального положения антенны βk(tn) в каждом k-м элементе дальности. Порядок получения оценок и следующий.
Поочередно фиксируется текущее значение азимута βk(tn) в k-м элементе разрешения дальности. Это текущее значение принимается в качестве середины интервала Тн, для которого получены комплексные значения отраженного сигнала. То есть для выбранного положения азимута βk(tn) из всего массива комплексных отраженных сигналов выбираются G сигналов, начиная с сигнала  и заканчивая сигналом
и заканчивая сигналом  . Затем, используя величины элементов
. Затем, используя величины элементов  MOC и величины отраженных сигналов, для каждого азимутального положения βk(tn) формируют матрицу результирующих сигналов
MOC и величины отраженных сигналов, для каждого азимутального положения βk(tn) формируют матрицу результирующих сигналов

элементы которой рассчитывают по формуле

где индекс «∑» означает, что проведено комплексное сложение одноименных по номерам p и l произведений  c разными номерами g.
c разными номерами g.
Далее аналогично прототипу среди всех элементов полученной результирующей матрицы  определяют номер строки
определяют номер строки  и столбца
и столбца  того элемента, модуль которого максимален. В способе-прототипе [3] для определения такого элемента использован квадрат модуля, что ничем не обосновано и требует расхода дополнительного вычислительного ресурса. С помощью установленных номеров и рассчитывают радиальную и тангенциальную составляющие скорости воздушного объекта, нахождение которого предполагается на азимуте βk(tn) и дальности rk. Расчет проводят по формулам
того элемента, модуль которого максимален. В способе-прототипе [3] для определения такого элемента использован квадрат модуля, что ничем не обосновано и требует расхода дополнительного вычислительного ресурса. С помощью установленных номеров и рассчитывают радиальную и тангенциальную составляющие скорости воздушного объекта, нахождение которого предполагается на азимуте βk(tn) и дальности rk. Расчет проводят по формулам


Так, последовательно изменяя рассматриваемое азимутальное положение βk(tn), для каждого конкретного азимута и k-го элемента дальности определяют величины оценок составляющих  и
и  .
.
Полученные оценки составляющих скорости используют для решения задачи обнаружения ВО. Обнаружение осуществляют также в пределах каждого k-го элемента дальности. С учетом того, что оценки составляющих и для смежных азимутальных положений антенны (например, для βk(t5) и βk(t6)) в случае наличия ВО на соответствующем азимуте будут совпадать, проводят последовательное сравнение оценок составляющих скорости и  В результате сравнения находят совокупность смежных азимутальных положений с одинаковыми значениями оценок составляющих скорости и
В результате сравнения находят совокупность смежных азимутальных положений с одинаковыми значениями оценок составляющих скорости и  Фиксируют начальное βk(tнач) и конечное βk(tкон) значения азимута с одинаковыми оценками составляющих скорости.
Фиксируют начальное βk(tнач) и конечное βk(tкон) значения азимута с одинаковыми оценками составляющих скорости.
При этом начальным значением βk(tнач) считают наименьшее из значений азимутов с одинаковыми оценками и  если в их совокупность не входит βk(t1). Наибольшее из значений азимутов с одинаковыми оценками и считают в этом случае конечным значением βk(tкон). Если же βk(t1) входит в совокупность азимутальных значений с одинаковыми оценками и то предварительно разделяют всю совокупность выделенных азимутальных положений на две части А и В, первая из которых А со смежными нарастающими номерами n дискретов времени tn заканчивается азимутальным положением
если в их совокупность не входит βk(t1). Наибольшее из значений азимутов с одинаковыми оценками и считают в этом случае конечным значением βk(tкон). Если же βk(t1) входит в совокупность азимутальных значений с одинаковыми оценками и то предварительно разделяют всю совокупность выделенных азимутальных положений на две части А и В, первая из которых А со смежными нарастающими номерами n дискретов времени tn заканчивается азимутальным положением  , а вторая В со смежными нарастающими номерами n дискретов времени tn начинается значением βk(t1). Азимутальное положение с наименьшим значением азимута (с наименьшим номером n) из части А принимают в качестве βk(tнач), а азимутальное положение с наибольшим значением азимута (с наибольшим номером n) из части В - в качестве βk(tкон).
, а вторая В со смежными нарастающими номерами n дискретов времени tn начинается значением βk(t1). Азимутальное положение с наименьшим значением азимута (с наименьшим номером n) из части А принимают в качестве βk(tнач), а азимутальное положение с наибольшим значением азимута (с наибольшим номером n) из части В - в качестве βk(tкон).
Рассчитывают истинное азимутальное положение ВО  по формулам:
по формулам:
а)  при отсутствии между βk(tнач) и βk(tкон) первого значения азимута
при отсутствии между βk(tнач) и βk(tкон) первого значения азимута 
б)  при наличии между βk(tнач) и βk(tкон) первого значения азимута β(t1), которое встречается, если совершать изменение азимута по часовой стрелке от βk(tнач) до βk(tкон).
при наличии между βk(tнач) и βk(tкон) первого значения азимута β(t1), которое встречается, если совершать изменение азимута по часовой стрелке от βk(tнач) до βk(tкон).
Принимают решение о том, что в k-м элементе разрешения по дальности на азимуте  находится ВО.
находится ВО.
Информацию обо всех обнаруженных ВО с указанием соответствующих им дальностей rk, азимутов βk(tn), линейных скоростей  (рассчитанных по правилу расчета гипотенузы в прямоугольном треугольнике с катетами, равными
(рассчитанных по правилу расчета гипотенузы в прямоугольном треугольнике с катетами, равными  и
и  ), их радиальных и тангенциальных составляющих выводят на дисплей для доведения до обслуживающего персонала радиолокатора, а соответствующие элементы дальности и азимута маркируют (помечают) на индикаторе кругового обзора радиолокатора яркостными отметками.
), их радиальных и тангенциальных составляющих выводят на дисплей для доведения до обслуживающего персонала радиолокатора, а соответствующие элементы дальности и азимута маркируют (помечают) на индикаторе кругового обзора радиолокатора яркостными отметками.
Кроме того, для полноценного решения поставленной задачи предлагается после приема отраженного сигнала перед подачей его для оцифровки на аналого-цифровой преобразователь (АЦП) проводить низкочастотную фильтрацию этого отраженного сигнала. Это необходимо для нейтрализации высокочастотной турбовинтовой модуляции. Для низкочастотной фильтрации целесообразно на входе АЦП предусмотреть наличие низкочастотного узкополосного фильтра. Назначение фильтра - пропуск полезного информативного низкочастотного сигнала и устранение высокочастотной составляющей сигнала. Для этого полоса пропускания используемого фильтра должна быть меньше, чем частота первых турбовинтовых составляющих спектра отраженного сигнала. Так как частоты составляющих турбовинтового эффекта (ТВЭ) лежат в диапазоне от единиц до сотен кГц [7, 8], полосу пропускания фильтра целесообразно установить в диапазоне 0-300 Гц. При прохождении через такой фильтр последовательность отраженных сигналов с огибающей, промодулированной турбовинтовыми составляющими (фиг.3, а), избавляется от негативного влияния ТВЭ, т.е. утрачивает высокочастотную турбовинтовую модуляцию (фиг.3, б).
Таким образом, усовершенствованный способ определения параметров движения воздушных объектов в обзорных радиолокаторах (за счет использования когерентных свойств отраженных сигналов) предлагается построить в виде логической последовательности следующих операций.
1) Заблаговременно рассчитывают число импульсов G, принимаемых с одного азимутального направления основным лепестком ХНА радиолокатора обзора по формуле (13)

где int2{•} - символ проведения операции округления до ближайшего целого четного числа; Тобз - период обзора пространства по азимуту; Δθβ - ширина основного лепестка ХНА радиолокатора по азимуту; Ти - период повторения зондирующих импульсов, используемый в радиолокаторе.
2) Излучают зондирующие и принимают отраженные сигналы в азимутальном диапазоне, начинающемся с азимута (-Δθβ/2) и заканчивающемся после одного полного оборота по азимуту (2π) азимутальным положением (2π+Δθβ/2), причем при приеме отраженных сигналов каждого периода повторения Ти в ОЗУ фиксируют значение соответствующего азимута β(tn) антенны в момент времени tn, где величина n изменяется в пределах (-G/2)…(Nобз+G/2).
3) Каждый принятый сигнал пропускают через низкочастотный фильтр с полосой пропускания 0-300 Гц для устранения высокочастотной турбовинтовой модуляции.
4) Регистрируют в цифровом виде квадратурные составляющие отраженных сигналов каждого периода повторения, вычисляют их комплексную форму и записывают эти значения в ОЗУ, причем отраженные сигналы n-го периода записывают в массив данных, соответствующий n-му азимутальному положению β(tn) и имеющий К ячеек (элементов) по числу элементов разрешения по дальности К=(rд-rб)/Δr, где rб - ближняя граница обнаружения объектов, rд - дальняя граница обнаружения объектов, Δr - величина элемента разрешения по дальности. В результате все принятые сигналы становятся маркированными, т.е. каждому принятому сигналу  соответствует вполне определенное азимутальное положение антенны β(tn) и дальность rk=Δrk.
соответствует вполне определенное азимутальное положение антенны β(tn) и дальность rk=Δrk.
5) Объединяют принятые сигналы, соответствующие одинаковым дальностям, в отдельные массивы реализации (МР), в каждом из которых будут записаны комплексные величины отраженных сигналов, полученных на разных азимутальных положениях, но на одинаковой дальности. Элементы k-го МР  будут соответствовать азимутальным положениям, изменяющимся от (-Δθβ/2) до (2π+Δθβ/2), т.е. с учетом одного полного оборота антенны по азимуту (вкруговую). Всего будет образовано К таких МР.
будут соответствовать азимутальным положениям, изменяющимся от (-Δθβ/2) до (2π+Δθβ/2), т.е. с учетом одного полного оборота антенны по азимуту (вкруговую). Всего будет образовано К таких МР.
6) Для каждого k-го элемента разрешения по дальности и соответствующего ему k-го МР формируют G матриц опорных сигналов  , где верхний индекс «k» указывает на соответствие k-му элементу дальности, т.е. k-й дальности rk. При этом каждая g-я МОС
, где верхний индекс «k» указывает на соответствие k-му элементу дальности, т.е. k-й дальности rk. При этом каждая g-я МОС  включает в себя P×L элементов,
включает в себя P×L элементов,
где P=2Vτ max/ΔVτ,  ,
,
L=2Vr max/ΔVr,
 .
.
7) Для каждого элемента с номером n от 1 до Nобз каждого k-го МР формируют соответствующую n-ю МРС  элементы которой
элементы которой  рассчитывают по формуле
рассчитывают по формуле
8) Среди элементов каждой n-й МРС  определяют номер строки
определяют номер строки  и столбца
и столбца  , которым соответствует элемент с максимальным модульным значением в пределах соответствующей МРС
, которым соответствует элемент с максимальным модульным значением в пределах соответствующей МРС  .
.
9) С помощью установленных номеров и рассчитывают радиальные и тангенциальные составляющие скорости воздушных объектов, которые предположительно (гипотетически) находятся в элементах пространства, соответствующих k-й дальности rk и азимуту β(tn), по формулам  и
и 
10) Записывают оценки радиальной и тангенциальной составляющих скорости каждого k-го элемента разрешения по дальности в трехмерный массив Mk (фиг.4), в первой строке которого располагают номер n, во второй - соответствующие оценки радиальной скорости, в третьей - соответствующие оценки тангенциальной скорости.
11) В пределах каждого массива Mk сравнивают элементы со смежными номерами и при наличии двух или нескольких подряд расположенных столбцов с совпадающими между собой значениями  , а также с совпадающими между собой значениями
, а также с совпадающими между собой значениями  фиксируют начальный
фиксируют начальный  и конечный
и конечный  номера, для которых получены одинаковые оценки составляющих скорости в k-м элементе разрешения по дальности, где индекс «m» означает номер частного подмножества (частного интервала) элементов с одинаковыми оценками составляющих скорости (в пределах массива Mk, т.е. k-го элемента дальности, может оказаться несколько ВО на разных азимутах). При этом последний и первый столбцы массива Mk также считают смежными.
номера, для которых получены одинаковые оценки составляющих скорости в k-м элементе разрешения по дальности, где индекс «m» означает номер частного подмножества (частного интервала) элементов с одинаковыми оценками составляющих скорости (в пределах массива Mk, т.е. k-го элемента дальности, может оказаться несколько ВО на разных азимутах). При этом последний и первый столбцы массива Mk также считают смежными.
Если подмножество элементов массива Mk с совпадающими между собой оценками  а также с совпадающими между собой оценками не включает крайние столбцы (фиг.5), то начальный номер присваивают столбцу из выделенного подмножества с наименьшим индексом n, а конечный номер присваивают столбцу из выделенного подмножества с наибольшим индексом n.
а также с совпадающими между собой оценками не включает крайние столбцы (фиг.5), то начальный номер присваивают столбцу из выделенного подмножества с наименьшим индексом n, а конечный номер присваивают столбцу из выделенного подмножества с наибольшим индексом n.
Если же указанное подмножество включает крайние столбцы (фиг.6), то начальным столбцом считают столбец с наименьшим индексом n из группы столбцов в конечной части массива, а конечным считают столбец со старшим индексом n из группы выделенных столбцов в начале массива. Такое обозначение соответствует круговому исчислению азимута (физической реальности) по часовой стрелке, что демонстрирует фиг.7. На фиг.7 цифрой 1* показано положение радиолокатора (центр индикатора круговой развертки), а цифрой 2* - направление изменения азимута.
12) Рассчитывают истинное азимутальное положение ВО  в пределах k-го элемента разрешения по дальности (на k-й дальности rk) с использованием нижеприведенных формул и правил:
в пределах k-го элемента разрешения по дальности (на k-й дальности rk) с использованием нижеприведенных формул и правил:
при отсутствии совпадений оценок составляющих скоростей для первого и Nобз-го азимутальных положений (столбцов массива Mk)

при наличии совпадений оценок составляющих скоростей для 1-го и Nобз-го азимутальных положений

13) Принимают решение о том, что в k-м элементе разрешения по дальности на азимуте  находится ВО.
находится ВО.
14) Для всех обнаруженных ВО рассчитывают линейную скорость Vво по формуле  , где Vr и Vτ - соответствующие этому ВО составляющие скорости.
, где Vr и Vτ - соответствующие этому ВО составляющие скорости.
15) Выводят на монитор радиолокатора информацию обо всех обнаруженных ВО в виде строк, в каждой из которых указывают азимут, дальность, линейную скорость, ее радиальную и тангенциальную составляющие, а на экране индикатора кругового обзора точки пространства с азимутами и дальностями обнаруженных ВО отмечают яркостными отметками.
Сущность изобретения заключается в следующем.
При когерентном сложении радиолокационных сигналов величина результирующего вектора (суммы) зависит от степени соответствия (равенства) фаз слагаемых. Поскольку ВО, являющийся источником отраженных сигналов, в течение интервала накопления Тн изменяет свою ориентацию и дальность по сложному закону, который учитывается выражением (1), предугадать или выявить этот закон невозможно, так как априори неизвестны число I и взаимное расположение РЦ, входящих в состав ВО. Кроме того, неизвестны точные значения составляющих вектора скорости. Все эти факторы и параметры для каждого конкретного ВО уникальны (отличаются и определяются конкретикой ситуации). Известные же методы измерения пространственного вектора линейной скорости ВО и его составляющих требуют длительного времени и не обеспечивают высокой точности.
Наилучшее качество когерентного сложения обеспечивается в том случае, если объект отражения радиоволн является неподвижным. Тогда фазы отраженных от него сигналов являются одинаковыми и становится реализуемым их синфазное сложение. Наличие фазовых составляющих, связанных с движением ВО, ухудшает или разрушает синфазность. Значит, для обеспечения синфазного сложения отражений необходимо устранить фазовые набеги, природа которых обусловлена движением ВО. Обнуление фазовых набегов, возникающих по причине наличия радиальной или тангенциальной составляющих, восстанавливает синфазность и увеличивает амплитуду когерентной суммы. Обнуление указанных фазовых набегов с точки зрения физической сущности гипотетически приводит к остановке ВО в пространстве, к стабилизации его положения.
Выражение (1) описывает сигнал с амплитудной и фазовой модуляцией, вызываемой изменением во времени ракурса ВО и перемещением в пространстве ХНА радиолокатора. При этом первый сомножитель (1) характеризует огибающую принимаемой пачки сигналов в соответствии с формой ХНА, второй - среднюю доплеровскую частоту отраженных сигналов, а третий - фазовую модуляцию, обусловленную сложением отражений от различных РЦ освещенной поверхности ВО на определенном ракурсе. Кроме того, выражение (1) показывает, что фазовая составляющая второго сомножителя, зависящая от радиальной скорости ВО, включает в себя всего одну неизвестную переменную Vr. Остальные известны априори. Сложнее ведет себя с течением времени третий сомножитель (1). Он зависит не только от Vτ, но и от взаимных радиальных удалений РЦ, находящихся на освещенной поверхности планера ВО при конкретном значении его пространственного ракурса. Однако следует учесть, что время накопления сигналов от каждого объекта (определяемое длительностью радиолокационного контакта основного луча ХНА с ВО) Тн в отличие от прототипа [3] составляет согласно способу сотые доли секунды. За это время ВО за счет прямолинейного движения и траекторных рысканий планера в атмосфере изменит свою ориентацию относительно радиолокатора на десятые доли градуса, что приводит к взаимным изменениям дальностей до РЦ на десятые доли сантиметров. Такие изменения в метровом диапазоне волн не могут приводить к существенным изменениям совокупного фазового набега. А изменение общего фазового набега на единицы градусов практически не влияет на результат когерентного сложения. Наличие начальной фазы, изменяющейся от периода к периоду, устраняется проведением согласованной фильтрации с использованием опорного гетеродинного напряжения соответствующего периода зондирования. А фаза отражения волн от поверхности ВО для всех РЦ составляет постоянную величину π. При успешной нейтрализации остальных фазовых флюктуаций и набегов отсутствие информации о совокупном фазовом сдвиге φ∑ не влияет на качество когерентного сложения сигналов, т.е. на амплитуду суммарного сигнала, и выражается лишь в неизвестной, но вполне конкретной величине фазы совокупного сигнала, которая предлагаемым способом игнорируется.
Таким образом, можно считать, что третий фазовый член выражения (1) может быть заменен функцией вида  . В этой функции неизвестной также является только одна переменная Vτ, если учесть, что обработка, согласно способу, ведется в пределах избранного k-го элемента разрешения по дальности, т.е. на k-й дальности rk.
. В этой функции неизвестной также является только одна переменная Vτ, если учесть, что обработка, согласно способу, ведется в пределах избранного k-го элемента разрешения по дальности, т.е. на k-й дальности rk.
Значит, при переборе всех возможных значений радиальных и тангенциальных составляющих вектора скорости объекта в компенсационном фазовом выражении вида

при его комплексном почленном перемножении с функцией принятого сигнала (1) в одном из случаев произойдет обнуление фазовых компонентов в результирующем произведении, и указанное произведение примет вид

А с учетом существенного превышения полезным сигналом среднего уровня аддитивного шума, выраженного слагаемым  , выражение (21) можно заменить его приближенной формой
, выражение (21) можно заменить его приближенной формой

которая показывает независимость фазы принимаемых сигналов от времени, что создает условия для сложения сигналов с максимальной степенью когерентности, т.е. обеспечивает синфазность сложения.
Другими словами, в случае правильной компенсации выравниваются фазы всех сигналов, принятых по главному лепестку ХНА, и их комплексная сумма будет иметь максимальную амплитуду. Этот факт и является определяющим в предлагаемом способе.
Подобный подход для организации когерентного сложения сигналов применяется в радиолокаторах, использующих принцип инверсного радиолокационного синтезирования апертуры [9-12]. По существу предлагаемый способ является одним из вариантов инверсного синтезирования апертуры.
Приведенные доводы и рассуждения являются законными и не требующими дополнительных операций, если речь идет о ВО, не имеющих в своем составе вращающихся элементов двигательных установок. Однако такие объекты не являются типовыми для радиолокаторов обзора (обнаружения), особенно военного назначения и принадлежащих системе управления воздушным движением. А при отражении радиоволн от ВО с открытыми полостями воздухозаборников и винтомоторными двигателями всегда возникает ТВЭ, приводящий к высокочастотной амплитудно-фазовой модуляции отраженных сигналов [7]. В этом случае в структуре принятого сигнала Sk(tn) будут присутствовать дополнительные фазовые составляющие, изменяющиеся во времени по сложному закону. Их наличие нарушит логику компенсации фазовых сдвигов, обусловленных конкретными значениями радиальной Vr и тангенциальной Vτ составляющих скорости ВО. Поэтому способ предусматривает компенсацию высокочастотной амплитудно-фазовой модуляции, связанной с проявлением ТВЭ [13]. Одним из способов компенсации такой негативной в данном случае модуляции является применение в приемнике аналогового низкочастотного фильтра после разделения отраженного сигнала на квадратурные составляющие. Другим способом компенсации ТВЭ является применение методов цифрового сглаживания реализации отражения [13] в квадратурных составляющих. Эти методы также могут быть применены в рамках предлагаемого способа. Поскольку все методы компенсации турбовинтовой модуляции являются известными, их сущность не раскрывается.
Наконец, разделение всего объема пространства на элементы разрешения по дальности и азимутальные направления β(tn) позволяет получить оценки Vr и Vτ для каждого импульсного объема [14] пространства в отдельности. А поскольку пачки сигналов, отраженных ВО, насчитывают десятки-сотни импульсов, то для смежных по азимуту импульсных объемов оценки Vr и Vτ будут одинаковыми, что позволяет методом их сравнения проводить обнаружение ВО. Для импульсных объемов, в которых отсутствуют ВО, способ также предоставит оценки Vr и Vτ. Но их значения будут случайными, и для смежных азимутальных положений ХНА эти оценки не будут совпадать. Следует подчеркнуть, что рекомендуемый способ является работоспособным именно при наличии типового шума в канале приема радиолокационной информации. Наличие шума является причиной искажения оценок Vr и Vτ на краях главного лепестка ХНА. Как только уровень полезного сигнала становится ниже среднего уровня шума, оценки Vr и Vτ начинают искажаться, и их совпадение для смежных азимутальных положений ХНА в пределах элемента разрешения по дальности Δr прекращается. В идеальных условиях (при входном отношении сигнал/шум 80 дБ и выше) способ не обеспечивает обнаружения за один обзор, а измерение составляющих Vr и Vτ требует предварительного обнаружения всех объектов.
Точность оценки радиальной скорости ВО Vr определяется известным соотношением  , где
, где  - среднее квадратическое отклонение (СКО) оценки по максимуму правдоподобия доплеровской частоты сигнала; Тн - время нахождения ВО в главном лепестке ХНА (время инверсного синтезирования апертуры).
- среднее квадратическое отклонение (СКО) оценки по максимуму правдоподобия доплеровской частоты сигнала; Тн - время нахождения ВО в главном лепестке ХНА (время инверсного синтезирования апертуры).
Точность оценки тангенциальной скорости ВО можно определить по методике, изложенной в [3, 15, с.184-195]. В частности, выражение для дисперсии оценки тангенциальной скорости имеет вид

где Z - число когерентно складываемых импульсных сигналов.
Выражение для СКО потенциальной точности оценки тангенциальной скорости Vτ имеет вид [3]

На основе представленных выражений можно показать, что при Тобз=10 с с помощью предлагаемого способа можно обеспечить СКО потенциальной точности оценок радиальной и тангенциальной составляющих скорости ВО порядка  и
и  При времени обзора при Тобз=30 с эти же характеристики составляют соответственно
При времени обзора при Тобз=30 с эти же характеристики составляют соответственно  и
и  Такие точности являются вполне приемлемыми для современных радиолокаторов обзора.
Такие точности являются вполне приемлемыми для современных радиолокаторов обзора.
Положительный технический эффект предлагаемого способа заключается в придании возможности радиолокаторам обзора проводить обнаружение воздушных объектов во всем окружающем пространстве практически за один обзор (один оборот антенны по азимуту) с одновременным обеспечением измерения радиальной и тангенциальной составляющих скорости каждого обнаруженного ВО независимо от наличия или отсутствия в его составе вращающихся элементов конструкции двигательных установок. Способ может использоваться для селекции движущихся объектов на фоне местных предметов, поскольку принадлежащие местным предметам оценки составляющих скорости равны нулю или близки к нулевым. Фиксируя этот фактор, сигналы от местных предметов можно исключить из обработки. В отличие от прототипа способ оценивает составляющие скоростей любых ВО, т.е. приближающихся и удаляющихся, а также движущихся слева направо или справа налево относительно линии визирования. Причем существующие системы селекции движущихся объектов с череспериодной компенсацией [5, 6, 14] вместе с сигналами местных предметов подавляют сигналы от объектов, движущихся тангенциально. В радиолокаторах, использующих предлагаемый способ, можно селектировать исключительно местные предметы и обеспечивать достоверное обнаружение ВО, имеющих только тангенциальную составляющую скорости или обе составляющие Vr и Vτ вектора скорости.
Способ может быть рекомендован для реализации в обзорных радиолокаторах метрового и дециметрового диапазона, используемых для контроля воздушного пространства в радиолокационных системах двойного назначения, то есть выполняющих задачи обнаружения и измерения в интересах министерств и ведомств военного и гражданского профиля. Особую значимость подобные радиолокаторы обзора имеют в системах управления воздушным движением и в посадочных радиолокационных комплексах аэродромных служб министерства гражданской авиации.
Источники информации
1. Бакулев П.А. Радиолокационные системы. Учебник для вузов. - М.: Радиотехника, 2004, 320 с. (аналог).
2. Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации: Учеб. пособие для вузов. - М.: Радио и связь, 1992. - 304 с.
3. Патент РФ №2337378. МПК7 G01S 13/42. Способ определения параметров траектории движения воздушных целей в обзорных РЛС. Лихачев В.П., Мубарак Н.Х. Заявка №2007125110. Приоритет 2.07.2007. Опубл. 27.10.2008. Бюлл. №30 (прототип).
4. Митрофанов Д.Г. Исследование отражательных характеристик воздушных объектов в условиях проявления траекторных нестабильностей. // Известия института инженерной физики, 2009. №3 (13). С.37-46.
5. Радиолокационные устройства (теория и принципы построения). / Под ред. В.В.Григорина-Рябова. - М.: Сов. Радио, 1970. 680 с.
6. Теоретические основы радиолокации. / Под ред. Я.Д.Ширмана. М.: Сов. радио, 1970. 560 с.
7. Радиоэлектронные системы: Основы построения и теория. Справочник. / Под ред. Я.Д.Ширмана. М.: Радиотехника, 2007. 512 с.
8. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. 152 с.
9. Стайнберг Б.Д. Формирование радиолокационного изображения самолета в диапазоне СВЧ. // ТИИЭР, 1988. №12. Т.76. С.26-46.
10. Митрофанов Д.Г. Комплексный адаптивный метод построения радиолокационных изображений в системах управления двойного назначения. // Теория и системы управления. Известия РАН, 2006. №1. с.101-118.
11. Митрофанов Д.Г. Формирование двумерного радиолокационного изображения цели с траекторными нестабильностями полета. Радиотехника и электроника. РАН, 2002. №7. с.852-859.
12. Митрофанов Д.Г. Метод построения радиолокационных изображений аэродинамических летательных аппаратов. // Полет, 2006. №11. с.52-60.
13. Митрофанов Д.Г., Прохоркин А.Г. Методы компенсации влияния составляющих турбинного эффекта при построении изображений воздушных целей. // Радиотехника, 2006. №9. с.32-37.
14. Финкельштейн М.И. Основы радиолокации. - М.: Радио и связь, 1983. 536 с.
15. Гришин Ю.П., Ипатов В.П., Казаринов Ю.М. и др. Радиотехнические системы. 1990. - 496 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов | 2024 |
|
RU2835850C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2007 |
|
RU2337378C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| СПОСОБ ВЫЯВЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ МАЛОРАЗМЕРНОГО ВОЗДУШНОГО ОБЪЕКТА В ВИДЕ РАДИАЛЬНОГО УСКОРЕНИЯ ДВИЖЕНИЯ ДЛЯ РЕЖИМА СОПРОВОЖДЕНИЯ С ИСПОЛЬЗОВАНИЕМ СИГНАЛОВ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2392640C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| СПОСОБ ВЫБОРА ПОЛОЖЕНИЯ ИНТЕРВАЛА ИНВЕРСНОГО СИНТЕЗИРОВАНИЯ АПЕРТУРЫ ПРИ НАЛИЧИИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА ВОЗДУШНОГО ОБЪЕКТА С ВОЗМОЖНОСТЬЮ ОЦЕНКИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ОТНОСИТЕЛЬНО РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2009 |
|
RU2409823C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА ВОЗДУШНОГО ОБЪЕКТА С МАЛЫМ КУРСОВЫМ УГЛОМ ПЕРЕМЕЩЕНИЯ | 2009 |
|
RU2410717C2 |





Изобретение относится к области обнаружения объектов и измерения параметров их движения. Достигаемый технический результат - обеспечение за время, соизмеримое с периодом одного оборота антенны по азимуту, достоверного обнаружения объектов и измерения параметров их движения в пределах всего окружающего воздушного пространства, независимо от типа двигательных установок воздушных объектов и направления их движения. Указанный результат достигается за счет того, что используется принцип компенсации фазовых набегов, обусловленных движением воздушных объектов, путем домножения принятых сигналов на специальный фазовый множитель, также учитывающий возможность наличия у объекта радиальной и тангенциальной составляющих скорости. При правильном подборе компенсирующего фазового множителя отраженные сигналы становятся синфазными и вектор их когерентного сложения максимизируется. По факту максимизации вектора когерентной суммы отраженных сигналов устанавливаются истинные значения радиальной и тангенциальной составляющих скорости движения объекта. 7 ил.
Способ определения параметров движения воздушных объектов в обзорных радиолокаторах за счет использования когерентных свойств отраженных сигналов, заключающийся в том, что излучают в процессе обзора пространства зондирующие сигналы, принимают отраженные сигналы, регистрируют квадратурные составляющие отраженных сигналов каждого периода повторения, вычисляют их комплексную форму и записывают эти значения в оперативное запоминающее устройство, формируют матрицы опорных сигналов, причем каждая матрица опорных сигналов включает в себя P×L элементов, формируют матрицу результирующих сигналов, элементы которой рассчитывают как суммы произведений элементов матриц опорных сигналов на принятые в процессе обзора соответствующие отраженные сигналы, среди элементов матрицы результирующих сигналов определяют номер строки и столбца, которым соответствует элемент с максимальным модульным значением, рассчитывают линейную скорость воздушного объекта VВО по правилу нахождения гипотенузы прямоугольного треугольника, катетами которого являются радиальная и тангенциальная составляющие скорости, отличающийся тем, что заблаговременно рассчитывают число импульсов G, принимаемых с одного азимутального направления основным лепестком характеристики направленности антенны радиолокатора по формуле

где int2{·} - символ проведения операции округления до ближайшего целого четного числа; Тобз - период обзора пространства по азимуту; Δθβ - ширина основного лепестка характеристики направленности антенны радиолокатора по азимуту; Ти - период повторения зондирующих импульсов, излучение зондирующих и прием отраженных сигналов проводят в азимутальном диапазоне, начинающемся с азимута (-Δθβ/2) и заканчивающемся после одного полного оборота антенны по азимуту азимутальным положением (2π+Δθβ/2), причем при приеме отраженных сигналов каждого периода повторения Ти в оперативном запоминающем устройстве фиксируют значение соответствующего азимута β(tn) антенны в момент времени tn, где величина n изменяется в пределах (-G/2)…(Nобз+G/2), где 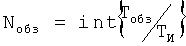 - число импульсов, принимаемых за один круговой обзор по азимуту; int{·} - символ вычисления целого значения числа в фигурных скобках; каждый принятый сигнал перед регистрацией в цифровом виде пропускают через низкочастотный фильтр с полосой пропускания 0-300 Гц, в процессе регистрации квадратурных составляющих отраженных сигналов каждого периода повторения и вычисления их комплексной формы отраженные сигналы n-го периода записывают в массив данных, соответствующий n-му азимутальному положению β(tn) и имеющий К элементов по числу элементов разрешения по дальности
- число импульсов, принимаемых за один круговой обзор по азимуту; int{·} - символ вычисления целого значения числа в фигурных скобках; каждый принятый сигнал перед регистрацией в цифровом виде пропускают через низкочастотный фильтр с полосой пропускания 0-300 Гц, в процессе регистрации квадратурных составляющих отраженных сигналов каждого периода повторения и вычисления их комплексной формы отраженные сигналы n-го периода записывают в массив данных, соответствующий n-му азимутальному положению β(tn) и имеющий К элементов по числу элементов разрешения по дальности  , где rб - ближняя граница обнаружения, rд - дальняя граница обнаружения, Δr - величина элемента разрешения по дальности, в результате чего все принятые сигналы делают маркированными, то есть каждому принятому сигналу
, где rб - ближняя граница обнаружения, rд - дальняя граница обнаружения, Δr - величина элемента разрешения по дальности, в результате чего все принятые сигналы делают маркированными, то есть каждому принятому сигналу  соответствует вполне определенное азимутальное положение антенны β(tn) и k-й элемент разрешения по дальности, определяющий дальность rk=Δrk, объединяют принятые сигналы, соответствующие одинаковым дальностям, в отдельные массивы реализации, в каждый из которых записывают комплексные величины отраженных сигналов, полученных на разных азимутальных положениях, но на одинаковой дальности, причем элементы каждого k-го массива реализации
соответствует вполне определенное азимутальное положение антенны β(tn) и k-й элемент разрешения по дальности, определяющий дальность rk=Δrk, объединяют принятые сигналы, соответствующие одинаковым дальностям, в отдельные массивы реализации, в каждый из которых записывают комплексные величины отраженных сигналов, полученных на разных азимутальных положениях, но на одинаковой дальности, причем элементы каждого k-го массива реализации  соответствуют азимутальным положениям, изменяющимся от (-Δθβ/2) до (2π+Δθβ/2), для каждого k-го элемента разрешения по дальности и соответствующего ему k-го массива реализации формируют G матриц опорных сигналов
соответствуют азимутальным положениям, изменяющимся от (-Δθβ/2) до (2π+Δθβ/2), для каждого k-го элемента разрешения по дальности и соответствующего ему k-го массива реализации формируют G матриц опорных сигналов  , где верхний индекс указывает на соответствие k-й дальности rk, при этом каждая g-я матрица опорных сигналов
, где верхний индекс указывает на соответствие k-й дальности rk, при этом каждая g-я матрица опорных сигналов  включает в себя P×L элементов, где
включает в себя P×L элементов, где  ,
,  ,
,  ,
,  , Vτ max - максимально возможное значение тангенциальной составляющей Vτ скорости воздушного объекта, Vr max - максимально возможное значение радиальной составляющей Vr скорости воздушного объекта, ΔVr и ΔVτ - величины шагов дискретизации подбираемых расчетом значений радиальной и тангенциальной
, Vτ max - максимально возможное значение тангенциальной составляющей Vτ скорости воздушного объекта, Vr max - максимально возможное значение радиальной составляющей Vr скорости воздушного объекта, ΔVr и ΔVτ - величины шагов дискретизации подбираемых расчетом значений радиальной и тангенциальной  составляющих линейной скорости воздушного объекта соответственно, l - текущий номер для дискретного подбора ; p - текущий номер для дискретного подбора
составляющих линейной скорости воздушного объекта соответственно, l - текущий номер для дискретного подбора ; p - текущий номер для дискретного подбора  , для каждого элемента с номером n от 1 до Nобз каждого k-го массива реализации формируют соответствующую n-ю матрицу результирующих сигналов
, для каждого элемента с номером n от 1 до Nобз каждого k-го массива реализации формируют соответствующую n-ю матрицу результирующих сигналов  значения элементов n-й матрицы результирующих сигналов
значения элементов n-й матрицы результирующих сигналов  рассчитывают по формуле
рассчитывают по формуле  среди элементов каждой n-й матрицы результирующих сигналов
среди элементов каждой n-й матрицы результирующих сигналов  определяют номер строки
определяют номер строки  и столбца
и столбца  , которым соответствует элемент с максимальным модульным значением в пределах соответствующей матрицы результирующих сигналов , с помощью установленных номеров и рассчитывают радиальные и тангенциальные составляющие скорости воздушных объектов, которые находятся в элементах пространства, имеющих дальность rk и азимут β(tn), по формулам
, которым соответствует элемент с максимальным модульным значением в пределах соответствующей матрицы результирующих сигналов , с помощью установленных номеров и рассчитывают радиальные и тангенциальные составляющие скорости воздушных объектов, которые находятся в элементах пространства, имеющих дальность rk и азимут β(tn), по формулам  и
и  записывают оценки радиальной и тангенциальной составляющих скорости каждого k-го элемента разрешения по дальности в трехмерный массив Mk, в первой строке которого располагают номер n, во второй - соответствующие оценки радиальной скорости, в третьей - соответствующие оценки тангенциальной скорости, в пределах каждого k-го массива Mk сравнивают элементы столбцов со смежными номерами, и при наличии двух или нескольких подряд расположенных столбцов с совпадающими между собой значениями
записывают оценки радиальной и тангенциальной составляющих скорости каждого k-го элемента разрешения по дальности в трехмерный массив Mk, в первой строке которого располагают номер n, во второй - соответствующие оценки радиальной скорости, в третьей - соответствующие оценки тангенциальной скорости, в пределах каждого k-го массива Mk сравнивают элементы столбцов со смежными номерами, и при наличии двух или нескольких подряд расположенных столбцов с совпадающими между собой значениями  , а также с совпадающими между собой значениями
, а также с совпадающими между собой значениями  фиксируют начальный
фиксируют начальный  и конечный
и конечный  номера, для которых получены одинаковые оценки составляющих скорости в k-м элементе разрешения по дальности, где индекс «m» означает номер частного подмножества элементов с одинаковыми оценками составляющих скорости, при этом последний и первый столбцы массива Mk также считают смежными, если подмножество элементов массива Mk с совпадающими между собой оценками , а также с совпадающими между собой оценками
номера, для которых получены одинаковые оценки составляющих скорости в k-м элементе разрешения по дальности, где индекс «m» означает номер частного подмножества элементов с одинаковыми оценками составляющих скорости, при этом последний и первый столбцы массива Mk также считают смежными, если подмножество элементов массива Mk с совпадающими между собой оценками , а также с совпадающими между собой оценками  не включает крайние, то есть, первый и последний столбцы, то начальный номер присваивают столбцу из подмножества с наименьшим индексом n, а конечный номер - столбцу из подмножества с наибольшим индексом n, если же выделенное подмножество включает крайние столбцы, то начальным столбцом считают столбец с наименьшим индексом n из группы столбцов в конечной части массива, а конечным считают столбец со старшим индексом n из группы выделенных столбцов в начале массива, рассчитывают истинное азимутальное положение воздушного объекта
не включает крайние, то есть, первый и последний столбцы, то начальный номер присваивают столбцу из подмножества с наименьшим индексом n, а конечный номер - столбцу из подмножества с наибольшим индексом n, если же выделенное подмножество включает крайние столбцы, то начальным столбцом считают столбец с наименьшим индексом n из группы столбцов в конечной части массива, а конечным считают столбец со старшим индексом n из группы выделенных столбцов в начале массива, рассчитывают истинное азимутальное положение воздушного объекта  в пределах k-го элемента разрешения по дальности с использованием нижеприведенных формул и правила:
в пределах k-го элемента разрешения по дальности с использованием нижеприведенных формул и правила:
при отсутствии совпадении оценок составляющих скоростей для первого и Nобз-го столбцов массива Mk
 ;
;
при наличии совпадений оценок составляющих скоростей для первого и Nобз-го столбцов массива Mk

где ωобз - угловая скорость поворота антенны при обзоре пространства, принимают решение о том, что в k-м элементе разрешения по дальности на азимуте находится воздушный объект, для каждого m-го из обнаруженных воздушных объектов на k-й дальности рассчитывают линейную скорость  по правилу нахождения гипотенузы прямоугольного треугольника, катетами которого являются соответствующие радиальная и тангенциальная составляющие скорости, выводят на монитор радиолокатора информацию обо всех обнаруженных воздушных объектах в виде строк, в каждой из которых указывают азимут, дальность, линейную скорость, ее радиальную и тангенциальную составляющие для соответствующего воздушного объекта, а соответствующие обнаруженным объектам элементы дальности и азимутальные положения помечают на индикаторе кругового обзора радиолокатора обзора яркостными отметками.
по правилу нахождения гипотенузы прямоугольного треугольника, катетами которого являются соответствующие радиальная и тангенциальная составляющие скорости, выводят на монитор радиолокатора информацию обо всех обнаруженных воздушных объектах в виде строк, в каждой из которых указывают азимут, дальность, линейную скорость, ее радиальную и тангенциальную составляющие для соответствующего воздушного объекта, а соответствующие обнаруженным объектам элементы дальности и азимутальные положения помечают на индикаторе кругового обзора радиолокатора обзора яркостными отметками.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2007 |
|
RU2337378C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ И ВОЗДУШНОЙ ОБСТАНОВКОЙ НА БАЗЕ МНОГОКАНАЛЬНОЙ БОРТОВОЙ РЛС | 2006 |
|
RU2316787C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| ТЕЛЕГРАФНЫЙ АППАРАТ ТИПА МОРЗЕ | 1927 |
|
SU6916A1 |
| US 4751511 A, 14.06.1988 | |||
| US 2008136709 A1, 12.06.2008 | |||
| CN 101162267 A, 16.04.2008. | |||

