Группа изобретений относится к машиностроению, в частности к дополнительному оборудованию, преимущественно для взвешивания груза непосредственно на платформе транспортного средства, например в кузове грузового автомобиля.
Известно взвешивающее устройство, представленное в виде монолитной калиброванной плоскости, размещенной, например, на грузоподъемной платформе специального грузового автомобиля, в котором взвешивающее устройство выполнено из одной несущей рамы с консолями четырех составляющих частей этой несущей рамы (1) и расположенных друг против друга однотипных отверстий по углам прямоугольной несущей рамы (1) и консоли (2), образованных гибкими подвесами (3), поддерживающих взвешивающую платформу (4), при этом по периметру несущей рамы (1) предусмотрен промежуток (зазор) (5) между несущей рамой (1) и взвешивающей платформой (4), и которое включает в каждом подвесе (3) один электрический весорегистрирующий аппарат (6), а именно такого рода, что сила тяжести должна быть преобразована гибкими подвесами (3) в электрические сигналы электронного весопреобразующего аппарата (6), при этом эти аппараты устойчиво фиксируют изменение веса. Электрические весорегистрирующие аппараты (6) снабжены силовой камерой с элементом растяжения, где фиксируемая сила тяжести посредством гибких подвесок (3) преобразуется на вертикальную составляющую силы, которая растягивает силовую камеру. Электрические весорегистрирующие аппараты (6) снабжены силовой камерой с элементом растяжения, где фиксируемая сила тяжести посредством гибких подвесок (3) преобразуется на вертикальную составляющую силы, которая растягивает силовую камеру. Электрические весорегистрирующие аппараты включены в гибкие подвесы (3) и размещены между консолью (2) и взвешивающей платформой (4). Электрические весорегистрирующие аппараты (6) укреплены на консолях (2) и гибких подвесах (3), которые одним концом укреплены с весорегистрирующими аппаратами [1] (Заявка ФРГ N 3501667, кл. G01G 19/12, 1986).
Описанное устройство обладает следующими существенными недостатками. Выступающие части Г-образных кронштейнов основания рамы над четырьмя углами грузовой платформы занимают полезную площадь грузовой платформы транспортного средства, что неприемлемо для грузового автомобиля, связанного с перевозками любого вида груза. Для повышения чувствительности элементов растяжения, например стержней, необходимо их выполнить как можно меньшего диаметра, но в этом случае снижается верхний предел грузоподъемности При увеличении диаметра стержня снижается величина упругой деформации материала элемента растяжения и этим увеличивается порог нечувствительности, а также относительная погрешность измерений.
Известно устройство учета веса лесоматериалов при проведении транспортных работ, включающее средство определения веса лесоматериалов, которое смонтировано на транспортном агрегате, содержащем ходовую часть и бортовую электросеть, средство определения веса лесоматериалов выполнено в виде измерительной системы, образованной смонтированными на верхних пластинах рессор каждой оси ходовой части агрегата тензоизмерительными мостами и связанным с ними усилителем, а также регистрирующим прибором, который в свою очередь электрически связан с усилителем, при этом блоки питания усилителя и регистрирующего прибора связаны с бортовой электросетью транспортного агрегата (Полезная модель РФ №86135, В27В 31/00, 09.04.2009).
Недостатком этого устройства является низкая надежность тензоизмерительных мостов, схемы обработки сигналов и недостаточные функциональные возможности устройства.
Наиболее близким техническим решением являются известные способ и устройство взвешивания полезного груза транспортного средства, содержащего кузов, погрузочную платформу, множество колес, подвеску колес для поддержания каждого колеса относительно кузова, причем подвеска колес содержит, по меньшей мере, одну конструкцию тележки, включающую, по меньшей мере, два моста, соединенные друг с другом на каждой стороне транспортного средства посредством горизонтального рычага, который соединен с кузовом посредством вертикального рычага, заключающийся в том, что измеряют вертикальные нагрузки, действующие на подвеску колес, по меньшей мере, на трех участках измерения, причем каждый участок снабжен по меньшей мере одним датчиком, передают данные измерения от датчиков, по меньшей мере, в одно вычислительное устройство взвешивания, определяют вес груза в вычислительном устройстве на основании данных измерения, полученных с участков измерения, и расчетных параметров вычислительного устройства, измеряют вертикальные напряжения, действующие на горизонтальный рычаг посредством, по меньшей мере, одного датчика, обрабатывают данные горизонтального рычага в качестве одного участка измерения в вычислительном устройстве, измеряют напряжения, действующие на горизонтальный рычаг, посредством, по меньшей мере, двух датчиков, располагают датчики на противоположных и, по существу, вертикальных боковых поверхностях горизонтального рычага, рассчитывают суммарное значение результатов измерений; полученных от датчиков на противоположных сторонах горизонтального рычага, и используют рассчитанное значение в качестве результата измерения, посредством чего исключают влияние поперечных сил (Патент на изобретение РФ №2373501, МПК G01G 19/12, 04.01.2006).
Недостатками указанного технического решения являются невысокая надежность и точность измерений, сложность устройства и силопередачи весовой нагрузки на датчики, невысокие функциональные возможности способа и его низкая информативность.
Технический результат от использования предлагаемых изобретений заключается в расширении функциональных возможностей и информативности способа, повышении надежности и точности измерений при одновременном упрощении устройства и снижении его стоимости.
Указанный технический результат достигается тем, что в способе измерения веса груза и контроля загрузки транспортного средства, заключающемся в том, что измеряют вертикальные нагрузки, действующие на подвеску колес более чем на одном участке измерения, каждый из которых снабжен по меньшей мере одним датчиком, передают данные измерения от датчиков, по меньшей мере, в одно вычислительное устройство взвешивания и определяют вес груза в вычислительном устройстве на основании данных измерения, полученных с участков измерения, и расчетных параметров вычислительного устройства, в качестве подвески используют, по меньшей мере, одну рессору транспортного средства, в качестве датчиков - датчики углового положения, каждый из которых устанавливают на рессоре так, что одна из трех взаимно перпендикулярных его осей лежит в плоскости местного горизонта, совпадает с продольной осью симметрии рессоры и направлена в положительном направлении движения транспортного средства, вторая лежит в плоскости местного горизонта, а третья перпендикулярна плоскости местного горизонта и направлена к центру Земли, причем вес груза и загрузку транспортного средства определяют с учетом углов отклонения участков рессоры, полученных с датчиков углового положения.
Кроме того, вес груза и загрузку транспортного средства с учетом углов отклонения участков рессоры, полученных с датчиков углового положения, вычисляют по формулам:


где Ра, Рза; Рпа - вес автомобиля и его распределение на заднюю и переднюю оси автомобиля соответственно;
 ,
,  - начальные показания углов датчиков для i=1÷5.
- начальные показания углов датчиков для i=1÷5.
РаΣ, РзΣ, РпΣ - суммарная масса автомобиля с грузом и распределения суммарного веса на заднюю и переднюю оси автомобиля соответственно;
РГ, РзГ, РпГ - вес груза и распределение веса груза на заднюю и переднюю оси автомобиля соответственно;
 ,
,  ,
,  ,
,  - положение рамы автомобиля перед загрузкой и после загрузки автомобиля соответственно.
- положение рамы автомобиля перед загрузкой и после загрузки автомобиля соответственно.
Для устройства указанный технический результат достигается тем, что в бортовой измерительной системе для измерения веса груза и контроля загрузки транспортного средства, содержащего более одного измерительного датчика, размещенного на подвеске колес и подключенного к бортовому вычислительному устройству, подвеска колес выполнена в виде, по меньшей мере, одной рессоры, измерительный датчик - в виде датчика углового положения, а бортовое вычислительное устройство состоит из блока управления и индикации, источника бесперебойного питания, вторичного источника питания, блока оконечного оборудования CAN, модуля GPS/GSM, Flash-памяти и микроконтроллера, при этом выход источника бесперебойного питания подключен к входу вторичного источника питания, один выход которого подключен к входу блока управления и индикации, второй - к блоку оконечного оборудования CAN, модулю GPS/GSM, Flash-памяти и через контроллер питания - к микроконтроллеру, третий - к измерительным датчикам, причем источник бесперебойного питания и вторичный источник питания подключены к бортовой электрической сети.
Кроме того, блок управления и индикации содержит лицевую панель бортовой информационно-измерительной системы, включающую в себя дисплей, зуммер, индикаторы, кнопки, крышку USB коннектора, крышку CAN коннектора.
Кроме того, микроконтроллер дополнительно содержит контроллер дисплея для связи с дисплеем блока управления и индикации, контроллер USB для связи с USB коннектором, контроллер Flash-ПЗУ для связи с Flash-памятью, контроллер GPS/GSM для связи с модулем GPS/GSM, контроллер сети CAN для связи с сетью CAN, порт ввода-вывода для связи с индикаторами и зуммером, контроллер клавиатуры для связи с кнопками.
Кроме того, по меньшей мере, один измерительный датчик расположен в области центра масс транспортного средства.
Изобретение поясняется чертежами.
На фиг.1 показана функциональная схема бортовой информационно-измерительной системы (БИИС).
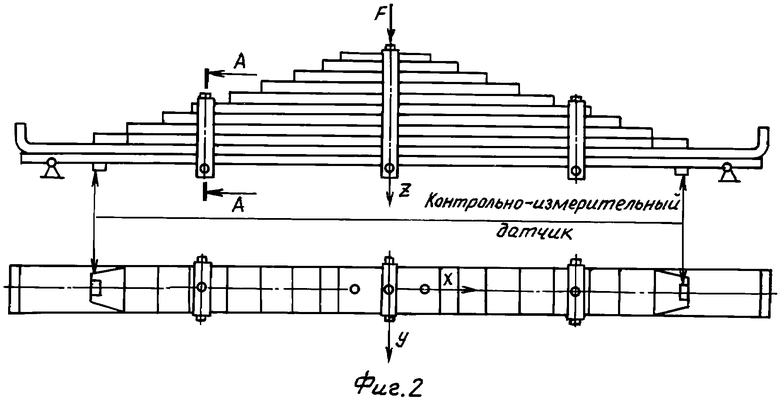
На фиг.2 показана схема расположения контрольно-измерительных датчиков на рессоре.
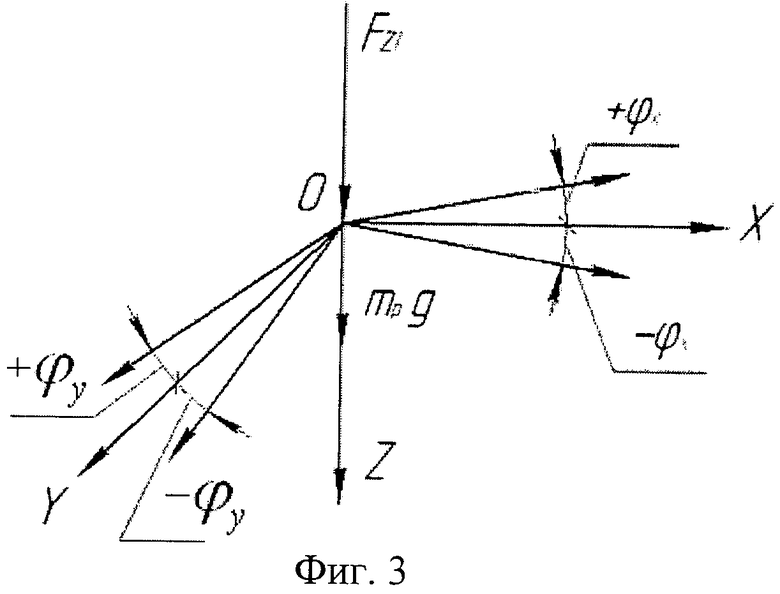
На фиг.3 показана ориентация контрольно-измерительного датчика.
На фиг.4 показана лицевая панель блока управления и индикации.
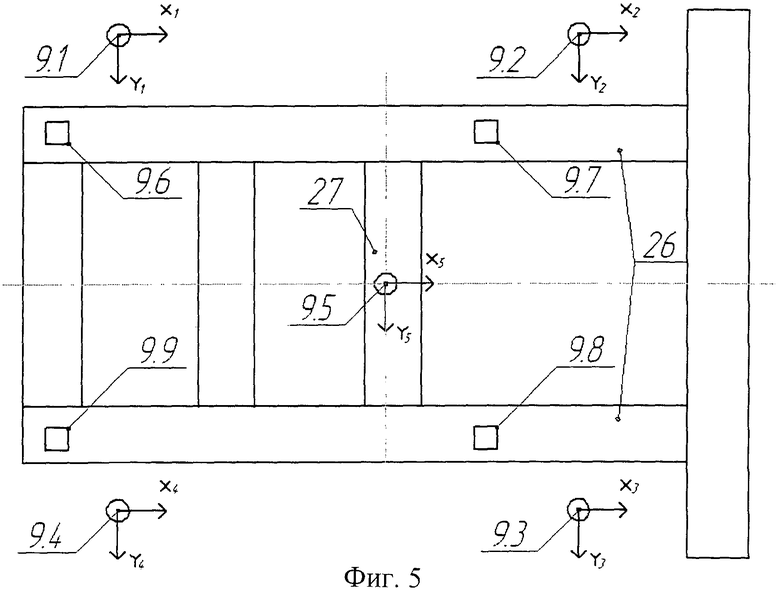
На фиг.5 показан вариант расположения датчиков для i=1÷5.
Обозначения на фиг.1 следующие:
1. Разъем подключения к бортовой электрической сети (БЭС);
2. Источник бесперебойного питания (ИБП);
3. Вторичный источник питания (ВИП);
4. Лицевая панель БИИС;
4.1 Зуммер;
4.2 Индикаторы;
4.3 Кнопка;
4.4 Дисплей;
4.5 USB-разъем;
4.6 CAN-разъем;
5. Микроконтроллер (МК);
5.1 Контроллер дисплея;
5.2 Контроллер USB;
5.3 Контроллер Flash-ПЗУ;
5.4 Контроллер GPS/GSM;
5.5 Контроллер сети CAN;
5.6 Контроллер питания;
5.7 Порт ввода-вывода;
5.8 Контроллер клавиатуры;
6. Оконечное оборудование CAN;
7. Flash-память;
8. GPS/GSM модуль;
9. Контрольно-измерительные датчики (1…n);
10.Резервный аккумулятор;
11. Сеть CAN;
12. Шина питания 24 В;
13. Шина питания 12 В;
14. Шина питания 5 В;
15. Шина питания 3.3 В;
16. Информационные шины измерительных датчиков (1…n) φi;
17. Информационная шина источника питания pow;
18. Информационные шины зуммера cnt;
19. Информационные шины индикаторов cnt;
20. Информационные шины кнопки but;
21. Информационные шины дисплея disp;
22. Информационная шина USB us;
23. Шина Flash-памяти mem;
24. Шина GPS/GSM модуля d, t;
25. Блок управления и индикации.
На фиг.5 обозначено
26. Продольные балки рамы;
27. Поперечная балка рамы.
Бортовая информационно-измерительная система, представленная на фиг.1, состоит из источника бесперебойного питания 2, вторичного источника питания 3, лицевой панели БИИС 4, микроконтроллера 5,оконечного оборудования CAN 6. Flash памяти 1, GPS/GSM модуля 8 и контрольно-измерительных датчиков 9.1-9.n., резервного аккумулятора 10, сети CAN 11, шин питания 24 В 12, 12 В 13, 5 В 14, 3.3 В 15, информационных шин контрольно-измерительных датчиков 16.1-16.n φi, информационной шины источника питания 17 pow, информационной шины зуммера 18 cnt, информационной шины индикаторов 19 cnt, информационной шины кнопки 20 but, информационной шины дисплея 21 disp, информационной шины USB 22 us, шины Flash-памяти 23 mem, шины GPS/GSM модуля 24 d,t, блока управления и индикации 25.
Напряжение бортовой электрической сети 1 по шине питания 24 В поступает на ИБП 2 с резервным аккумулятором 10. Далее это напряжение преобразуется на ВИП 3 до 12 В, 5 В и 3.3 В. Напряжение 12 В через шину питания 13 поступает на контрольно-измерительные датчики 9.1-9.n. Напряжение питания 5 В с ВИП 3 поступает через шину питания 14 на лицевую панель 4. Напряжение питания 3,3 В с ВИП 3 поступает через шину питания 15 на контролер питания 5.6 микроконтроллера 5 и на цепи питания Flash-памяти 7, GPS/GSM модуля 8 и оконечного оборудования CAN 6. При поступлении по шине питания 24 В необходимого напряжения аккумулятор 10 заряжается, а при понижении необходимого уровня аккумулятор 10 поддерживает уровень напряжения питания в 24 В для корректного завершения работы БИИС.
Информация с контрольно-измерительных датчиков 91-9.n в кодированном виде цифровых значений углового положения φi по информационным шинам 16.1-16.n поступает в сеть CAN 11 и из нее в контроллер сети CAN 5.5 и CAN разъем лицевой панели 4.6. Информация о текущем географическом положении и о времени поступает с GPS/GSM модуля 8 по шине 24 d,t в контроллер GPS/GSM 5.4 микроконтроллера 5. Информация от ВИП 3 поступает на порт ввода-вывода 5.7 МИКРОКОНТРОЛЛЕР5 по шине 17 pow. Управляющие сигналы с кнопки 4.3 лицевой панели 4 поступают по шине 20 but в контроллер клавиатуры 5.8 микроконтроллера 5. Индикация рабочего состояния производится с помощью зуммера 4.1 лицевой панели 4, индикаторов 4.2 и дисплея 4.4 по шинам 18, 19, 21 cnt и disp. Сбор информации также возможен через USB-разъем 4.5 и CAN-разъем 4.6 по шинам 22 и из сети CAN. Сохранение информации происходит по шине 23 во Flash-память 7.
Информация с контрольно-измерительных датчиков 9.1-9.n, с GPS/GSM модуля 8 и кнопки 4.3 обрабатывается в микроконтроллере 5, анализируется, и данные сохраняются в энергонезависимой Flash-памяти 7 по шине 23.
Состав бортовой информационно-измерительной системы (БИИС) может быть реализован в соответствии с фиг.1.
Разъем подключения БИИС к бортовой электрической сети РС19, Intro СН. Вторичный источник питания 3 на основе аккумуляторной батареи 10, обеспечивающий полноценное завершение работы БИИС. Данный источник обеспечивает работу системы при потере питания 24 В. Во время работы БИИС с обеспечением питания от бортовой сети автомобиля происходит подзарядка аккумулятора ВИП 10. Вторичный источник питания обеспечивает три номинала стабильного напряжения: +12 В, +5 В, +3.3 В. Он необходим для обеспечения питания элементов БИИС: МИКРОКОНТРОЛЛЕР5, оконечное оборудование CAN 6, Flash-память 7, GPS/GSM модуль 8, блок управления и индикации 25. Также он обеспечивает информирование микроконтроллера об источнике питания (рабочая бортовая сеть автомобиля, питание от аккумулятора 10). Лицевая панель БИИС 4, с установленным на ней дисплеем 4.4, зуммером (динамиком) 4.1, индикаторами (4.2), кнопкой управления 4.3, разъемами USB 4.5 и CAN 4.6, прикрытыми крышками, предназначена для вывода текущей информации об автомобиле, касающейся БИИС, для управления БИИС и связи сотрудников сервис-центров с ее внутренними компонентами. МИКРОКОНТРОЛЛЕР5 обеспечивает сбор, обработку, сохранение, процедуры контроля за БИИС. Его составляющие части:
- Контроллер дисплея 5.1 - элемент МК, необходимый для организации работы дисплея на лицевой панели БИИС.
- Контроллер USB 5.2 - элемент МК, необходимый для организации интерфейса USB.
- Контроллер FLASH ПЗУ 5.3 - элемент МК, необходимый для организации интерфейса с Flash-памятью.
- Контроллер GPS/GSM 5.4 - элемент МК, необходимый для организации работы с GPS/GSM.
- Контроллер сети CAN 5.5 - элемент МК, необходимый для организации работы сети CAN.
- Контроллер питания 5.6 - элемент МК, необходимый для контроля питания МК.
- Порт вв/выв 5.7 - элемент МК, необходимый для управления индикаторами и зуммером.
- Контроллер клавиатуры 5.8 - элемент МК, необходимый для управления кнопкой.
Оконечное оборудование CAN 6 - микросхемы, обеспечивающие организацию сети CAN. GPS/GSM модуль - модуль, обеспечивающий географическое позиционирование и точное текущее время. Контрольно-измерительные датчики - набор из N датчиков углового положения с интерфейсом CAN.
Дисплей 4.4 располагается на панели 4, перпендикулярной корпусу БИИС. Связь с дисплеем 4.4 осуществляется посредством кабелей. Работа БИИС заключается в следующем: при включении зажигания в автомобиле происходит подача напряжения питания от бортовой системы автомобиля через разъем 1 на шину питания 24 В 12. Напряжение 24 В подается посредством шины питания 12 на ИБП 2 и ВИП 3. ИБП 2 имеет в своем составе аккумулятор 10, способный обеспечить корректное завершение работы БИИС через шину 12.1. Аккумулятор 10 заряжается в процессе работы БИИС через шину 12.2. ВИП 3 устанавливает на шине 13 напряжение 12 В, на шине 14 напряжение 5 В, на шине 15 напряжение 3.3 В. Далее на микроконтроллере 5 включается процесс самотестирования, заключающегося в проверке работоспособности контрольно-измерительных датчиков 9.1-9.n и Flash-памяти. При успешном прохождении процесса самотестирования происходит индикация этого успеха на дисплее 4.4 лицевой панели 4.
Затем на контроллер сети CAN 5.5 микроконтроллера 5 поступает информация с контрольно-измерительных датчиков 9.1-9.n в цифровом виде об угловом положении каждого контрольно-измерительного датчика по сети CAN 11. Каждый контрольно-измерительный датчик расположен на рессоре согласно Фиг.1. или на раме автомобиля Фиг.5.
Каждый контрольно-измерительный датчик сориентирован на рессоре так, что:
- OX - лежит в плоскости местного горизонта и совпадает с продольной осью симметрии рессоры и направлена в положительном направлении движения автомобиля;
- OY - лежит в плоскости местного горизонта и перпендикулярна оси X;
- ОZ - перпендикулярна плоскости местного горизонта и направлена к центру Земли.
В микроконтроллере 5 производится обработка полученных сигналов от контрольно-измерительных датчиков 9.х для последующего вычисления загруженности рессор автомобиля по формулам:
где Pa, Рзa, Pпa - вес автомобиля и его распределение на заднюю и переднюю оси автомобиля соответственно;
, - начальные показания углов датчиков для i=1÷5;
РаΣ, РзΣ, РпΣ - суммарная масса автомобиля с грузом и распределения суммарного веса на заднюю и переднюю оси автомобиля соответственно;
РГ, РзГ, РпГ - вес груза и распределение веса груза на заднюю и переднюю оси автомобиля соответственно;
, , , - положение рамы автомобиля перед загрузкой и после загрузки автомобиля соответственно.
Один датчик 9.5 БИИС должен находиться на раме автомобиля. Он необходим для учета исходных углов наклона автомобиля.
Географические координаты - широта и долгота (d), а также точное время (t) вычисляются на основе показаний GPS/GSM модуля 8, переданных по шине 24 в МК.
Затем на дисплей 4.4 лицевой панели 4 последовательно на некоторое время выводится информация о загрузке каждой рессоры с каждого контрольно-измерительного датчика 9.1-9.4 и о текущем географическом положении и времени с GPS/GSM модуля 8.
При превышении массы общего количества груза, перевозимого автомобилем, БИИС помечает это событие в файле во Flash-памяти 7 в месте, соответствующем перегруженной рессоре, и в колонке, соответствующей массе общего количества груза. Также раздается звуковой сигнал в кабине водителя посредством зуммера 4.1, длительностью 60 секунд с периодом повторения 5 минут, сообщающий о перегрузе автомобиля. Также индикация перегруза производится посредством дисплея 4.4 и индикатора перегрузки.
Возможна отправка SMS-сообщения на заранее запрограммированный номер телефона* с сообщением о перегрузе автомобиля с его номером посредством модуля GPS/GSM 8.
(*Для этого в модуль GPS/GSM 8 БИИС должна быть вставлена SIM-карта с ненулевым балансом и должна обеспечиваться устойчивая мобильная связь).
При потере необходимого уровня напряжения по шине питания 24В БИИС завершает свою работу, индицируя после выключения свое состояние посредством индикаторов 4.2 и зуммера 4.1 лицевой панели 4.
Сохранение информации.
Информация о загруженности осей автомобиля будет сохраняться в энергонезависимой Flash-памяти 7. В ней будут находиться файлы, создающиеся автоматически с началом нового дня при первом включении зажигания. В этих файлах будет находиться информация о нагрузках на каждую рессору с привязкой ко времени и географическому положению, а также информация о системных событиях (об исправности контрольно-измерительных датчиков 9.х, об источнике питания ВИП 3 и т.д.). Добавляться информация в эти файлы будет по мере изменения нагрузок на рессоры (см. пример файла). Т.е. с 08:55:20 до 09:15:25 загрузка кузова автомобиля не изменялась. Затем в 09:15:25 она поменялась и в дальнейшем также оставалась постоянной.
Пример файла БИИС.
//Идентификационный номер БИИС_29_04_2010 Начало файла//////////////////////////
29.04.2010
08:55:10 Включение системы зажигания.
Переход на систему питания от автомобиля бортовой сети автомобиля.
Процедура самотестирования БИИС пройдена успешно.
- Датчик 1 исправен.
- Датчик 2 исправен.
- …
- Датчик N исправен.
17:58:50 Выключение системы зажигания.
Переход на систему питания от аккумулятора автомобиля.
Превышения нагрузок не зафиксировано.
Сохранение информации в энергонезависимую память.
//////////////////////////////Конец файла///////////////////////////
Данные файлы сохраняются в течение всего срока службы БИИС на Flash-памяти 7.
Для доступа к данным со стороны сотрудников сервис-центра предусмотрен разъем USB 4.5 на лицевой панели 4. При подключении ноутбука со специальной программой к разъему USB 4.5 становится доступным перемещение данных файлов из Flash-памяти 7 БИИС в память ноутбука. Данные могут храниться в зашифрованном или в открытом виде. Для связи БИИС с более высокоуровневой системой управления предусмотрен разъем CAN 4.6. Для предотвращения несанкционированного доступа к устройству через разъем USB 4.5 и CAN 4.6, для них предусмотрена пломба.
На фиг.4 представлены составляющие лицевой панели 4:
4.1 Зуммер
4.2.1 Индикатор 1
4.2.2 Индикатор 2
4.3 Многофункциональная кнопка
4.4 Дисплей
4.5 USB-разъем
4.6 CAN-разъем
Зуммер
Зуммер 4.1 включается при превышении допустимых нагрузок на рессоры и продолжает свою работу в течение 1 минуты, затем выключается. Следующее включение зуммера 4.1 происходит через 5 минут, если нагрузка на рессоры не уменьшилась до допустимого уровня.
Индикатор 1 (Индикатор питания)
Индикатор 1, показанный на рисунке 3, информирует о наличии питания прибора. Если индикатор не горит, значит, питание отсутствует.
Индикатор 2 (Индикатор перегрузки)
Индикатор 2, показанный на рисунке 3, информирует о наличии перегрузки, то есть превышении максимально допустимой массы груза. Если индикатор 2 горит зеленым,
это означает, что превышения допустимого веса нет. Если же индикатор горит красным, это означает, что превышен допустимый вес груза.
Многофункциональная кнопка 4.3
При нажатии на кнопку 4.3 производится переход с текущей страницы индицируемой информации на последующую страницу.
Страницы информации
Знак «!!» означает, что нагрузка превысила допустимые пределы. Знак «ОК» означает, что элемент, режим работы находятся в допустимом состоянии.
Ход работы БИИС на практике в автомобиле.
Для приведения системы БИИС в работоспособное состояние необходимо установить все датчики 9.1-9.n на специально предусмотренных частях автомобиля (рессоры и переднюю ось), проложить кабели питания и связи с датчиками, установить блок управления и индикации 25, соединить разъем подключения к бортовой электрической сети 1 с ответным разъемом автомобиля. После этого БИИС готова к использованию.
Включение БИИС происходит при включении зажигания автомобиля. На дисплее отображается страница 1 с индикацией работоспособности датчиков 9.1-9.n и наличием питания. При нажатии на кнопку 4.3 происходит отображение следующей страницы и т.д. После отображения страницы 10 (Моторесурс) происходит отображение страницы 1. При выходе из строя какого-либо датчика 9.х, превышении нагрузки, потере допустимого уровня напряжения питания происходит включение зуммера, оповещающего о неполадках. Выключение БИИС происходит вместе с выключением зажигания автомобиля.
Таким образом, указанными изобретениями получен технический результат от использования, который заключается в расширении функциональных возможностей и информативности способа, повышении надежности и точности измерений при одновременном упрощении устройства и снижении его стоимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЕ УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ | 2011 |
|
RU2480834C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ, ТЕРМОЭЛЕКТРОННОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ С АВТОЭЛЕКТРОННОЙ ЭМИССИЕЙ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2010 |
|
RU2447411C1 |
| Бортовой аппаратно-программный комплекс системы определения веса груза и нагрузки на ось грузовых транспортных средств | 2018 |
|
RU2694449C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| Сейсмокардиоблок и способ измерения сейсмокардиоцикла | 2017 |
|
RU2679296C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ УКЛОНОВ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТОВ | 2008 |
|
RU2382986C2 |
| БОРТОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2402439C1 |

Группа изобретений относится к измерительной технике, в частности к весоизмерительным устройствам, и может быть использована для взвешивания груза непосредственно на платформе транспортного средства, например в кузове грузового автомобиля. Способ заключается в том, что измеряют вертикальные нагрузки, действующие на подвеску колес, в качестве которой используют рессоры, снабженные датчиками углового положения, каждый из которых устанавливают на отдельной рессоре так, что одна из трех взаимно перпендикулярных его осей лежит в плоскости местного горизонта, совпадает с продольной осью симметрии рессоры и направлена в положительном направлении движения транспортного средства, вторая лежит в плоскости местного горизонта, а третья перпендикулярна плоскости местного горизонта и направлена к центру Земли. Далее передают данные измерения от датчиков, по меньшей мере, в одно вычислительное устройство взвешивания и определяют вес груза и загрузку транспортного средства в вычислительном устройстве с учетом углов отклонения участков рессоры, полученных с датчиков углового положения. Устройство содержит более одного измерительного датчика, размещенного на подвеске колес и подключенного к бортовому вычислительному устройству, подвеска колес выполнена в виде, по меньшей мере, одной рессоры, измерительный датчик - в виде датчиков углового положения, а бортовое вычислительное устройство состоит из блока управления и индикации, источника бесперебойного питания, вторичного источника питания, блока оконечного оборудования CAN, модуля GPS/GSM, Flash-памяти и микроконтроллера. Технический результат заключается в расширении функциональных возможностей, повышении надежности и точности измерений при одновременном упрощении устройства. 2 н. и 4 з.п. ф-лы, 5 ил.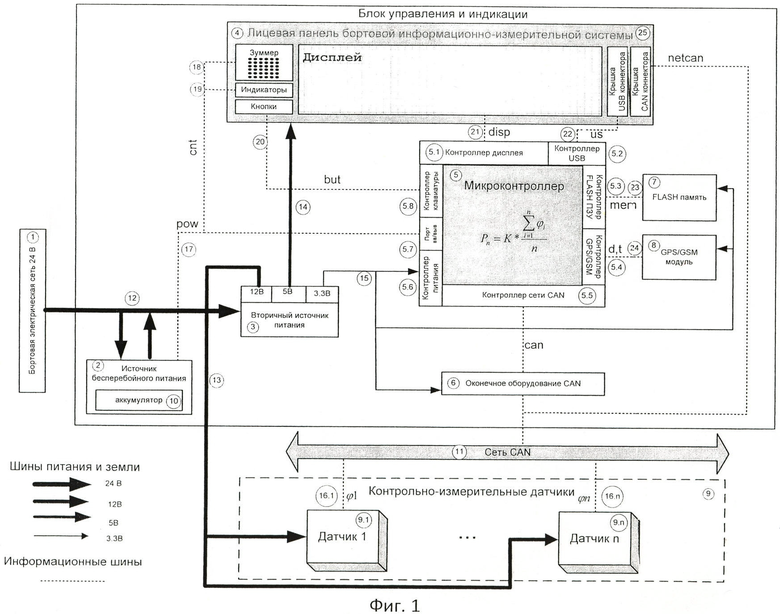
1. Способ измерения веса груза и контроля загрузки транспортного средства, заключающийся в том, что измеряют вертикальные нагрузки, действующие на подвеску колес более чем на одном участке измерения, каждый из которых снабжен, по меньшей мере, одним датчиком, передают данные измерения отдатчиков, по меньшей мере, в одно вычислительное устройство взвешивания и определяют вес груза в вычислительном устройстве на основании данных измерения, полученных с участков измерения, и расчетных параметров вычислительного устройства, отличающийся тем, что в качестве подвески используют, по меньшей мере, одну рессору транспортного средства, в качестве датчиков - датчики углового положения, каждый из которых устанавливают на рессоре так, что одна из трех взаимно перпендикулярных его осей лежит в плоскости местного горизонта, совпадает с продольной осью симметрии рессоры и направлена в положительном направлении движения транспортного средства, вторая лежит в плоскости местного горизонта, а третья перпендикулярна плоскости местного горизонта и направлена к центру Земли, причем вес груза и загрузку транспортного средства определяют с учетом углов отклонения участков рессоры, полученных с датчиков углового положения.
2. Способ по п.1, отличающийся тем, что вес груза и загрузку транспортного средства с учетом углов отклонения участков рессоры, полученных с датчиков углового положения, вычисляют по формулам:

где Ра, Рза, Рпа - вес автомобиля и его распределение на заднюю и переднюю оси автомобиля соответственно;
, - начальные показания углов датчиков для i=1÷5;
РаΣ, РзΣ, РпΣ - суммарная масса автомобиля с грузом и распределения суммарного веса на заднюю и переднюю оси автомобиля соответственно;
РГ, РзГ, РпГ - вес груза и распределение веса груза на заднюю и переднюю оси автомобиля соответственно;
, , , - положение рамы автомобиля перед загрузкой и после загрузки автомобиля соответственно;
φi - цифровое значение угла наклона i-го датчика;
К - коэффициент зависимости угла отклонения рессоры от нагрузки на нее.
3. Бортовая измерительная система для измерения веса груза и контроля загрузки транспортного средства, содержащего более одного измерительного датчика, размещенного на подвеске колес и подключенного к бортовому вычислительному устройству, отличающаяся тем, что подвеска колес выполнена в виде, по меньшей мере, одной рессоры, измерительный датчик - в виде датчика углового положения, а бортовое вычислительное устройство состоит из блока управления и индикации, источника бесперебойного питания, вторичного источника питания, блока оконечного оборудования CAN, модуля GPS/GSM, Flash-памяти и микроконтроллера, при этом выход источника бесперебойного питания подключен ко входу вторичного источника питания, один выход которого подключен ко входу блока управления и индикации, второй - к блоку оконечного оборудования CAN, модулю GPS/GSM, Flash-памяти и - через контроллер питания - к микроконтроллеру, третий - к измерительным датчикам, причем источник бесперебойного питания и вторичный источник питания подключены к бортовой электрической сети.
4. Система по п.3, отличающаяся тем, что блок управления и индикации содержит лицевую панель бортовой информационно-измерительной системы, включающую в себя дисплей, зуммер, индикаторы, кнопки, крышку USB коннектора, крышку CAN коннектора.
5. Система по п.3, отличающаяся тем, что микроконтроллер дополнительно содержит контроллер дисплея для связи с дисплеем блока управления и индикации, контроллер USB для связи с USB коннектором, контроллер Flash-ПЗУ для связи с Flash-памятью, контроллер GPS/GSM для связи с модулем GPS/GSM, контроллер сети CAN для связи с сетью CAN, порт ввода-вывода для связи с индикаторами и зуммером, контроллер клавиатуры для связи с кнопками.
6. Система по п.3, отличающаяся тем, что, по меньшей мере, один измерительный датчик расположен в области центра масс транспортного средства.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗА ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2373501C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ СТОЯНОЧНОЙ НАГРУЗКИ НА ШАССИ С РЫЧАЖНОЙ ПОДВЕСКОЙ КОЛЕС | 1976 |
|
SU658959A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТОЯНОЧНОГО ВЕСА САМОЛЕТА | 1975 |
|
SU555693A1 |
| Устройство для определения моментного веса изделий | 1979 |
|
SU859824A1 |

