Изобретение относится к измерительной технике, в частности к системам позиционирования и устройствам для определения углов наклона объектов и оборудования на производстве и в быту относительно местного горизонта.
Известно устройство для измерения угла наклона «Цифровой измеритель уклонов» (патент РФ №2166732, МПК 7 G01C 9/00 от 10.05.2001), содержащий корпус с рабочей поверхностью, установленный внутри корпуса преобразователь силы в электрический сигнал с электронной схемой преобразования сигнала, при этом снаружи на корпусе установлены переключатель координат измерения, выполненный с возможностью механического переключения режимов измерения, и жидкокристаллический индикатор, выполненный с возможностью одновременной индикации направления и величины уклона по любой из двух геометрических осей симметрии корпуса в плоскости его рабочей поверхности, а преобразователь силы в электрический сигнал выполнен в виде двухкоординатного измерителя ускорения силы тяжести, закрепленного внутри корпуса с обратной стороны его рабочей поверхности, при этом переключатель координат измерения, жидкокристаллический индикатор и двухкоординатный измеритель ускорения силы тяжести подключены к электронной схеме преобразования сигнала.
К недостаткам данного устройства относятся его ограниченные эксплуатационные возможности, заключающиеся в том, что устройство позволяет производить индикацию направления и величины уклона только по одной из двух геометрических осей симметрии корпуса. Для изменения оси измерения в данном устройстве предусмотрен переключатель координат измерения.
Наиболее близким аналогом заявленного изобретения является «Способ измерения уклонов и цифровой измеритель для его осуществления» (патент РФ №2227899, МПК 7 G01C 9/00 от 27.04.2004). Данный способ измерения уклонов включает измерение величины проекции ускорения свободного падения на ось чувствительности преобразования величины линейного ускорения в выходной сигнал, определение положения преобразователя относительно горизонтальной плоскости или местной вертикали, по которому судят о величине уклонов. При этом измеряют величины проекций ускорения свободного падения в направлении трех взаимно ортогональных осей чувствительности к величинам линейных ускорений. Положение преобразователя относительно горизонтальной плоскости или местной вертикали определяют по величинам проекций ускорения свободного падения в направлении двух из этих осей, которые выбирают при достижении третьей осью направления заданного допустимым углом отклонения любой оси чувствительности от местной вертикали. Цифровой измеритель уклонов содержит снабженный установочным узлом корпус, в котором размещены инерционный измеритель силы тяжести с электронной схемой преобразования сигнала инерционного измерителя в визуальную информацию об уклонах, автономный источник электропитания электронной схемы. Установочный узел корпуса выполнен в виде пяти плоских установочных баз, из которых три ортогональны друг другу, две параллельны им, двух взаимно перпендикулярных призматических установочных баз, параллельных соответствующим плоским установочным базам. Инерционный измеритель ускорения силы тяжести выполнен трехкоординатным и закреплен жестко относительно установочных баз. В электронную схему преобразования сигнала измерителя введен микропроцессор с моделью погрешности определения силы тяжести.
Недостатком данного способа является использования дополнительного акселерометра и избыточное количество баз. Кроме этого, общим недостатком микромеханических акселерометров является зависимость их показаний от температуры и напряжения питания.
Задачей, решаемой заявленной группой изобретений, является снижение затрат на производство за счет обеспечения аппаратной унификации системы позиционирования, а также повышение надежности работы, расширение эксплутационных возможностей устройства и повышение точности измерения в области измерения углов в диапазоне менее 90 угл. град.
Поставленная задача решается за счет того, что в способе определения уклонов, включающем измерение величины проекции ускорения силы тяжести на ось измерителя ускорения, сигнал с выхода которого, пропорциональный измеряемому углу, используют для определения угла уклона относительно горизонтальной плоскости, в зависимости от диапазона d измеряемых углов, угол уклона относительно горизонтальной плоскости в диапазоне от 0 до 45 [угл. град.] определяют как

 ,
,
а в диапазоне от 45 до 90 [угл. град.] угол уклона относительно горизонтальной плоскости определяют как:
 ,
,

 ,
,
где α, β - угол уклона относительно горизонта [угл. град.];
где Uα, Uβ - величины сигналов [В], соответствующие измеряемому углу α или β и равные произведению напряжения снимаемого с двухкоординатного измерителя ускорения на коэффициент Kd диапазона измеряемых углов и вычисляемый по формуле:
 ,
,
где 0<D≤90;
Kax, Kay - масштабные коэффициенты двухкоординатного измерителя ускорения [в*c2/м];
g - ускорение силы тяжести [м/с2].
Поставленная задача для системы позиционирования решается за счет того, что в системе, содержащей корпус с рабочей поверхностью и установленные внутри корпуса плату блока, на которой размещены двухкоординатные измерители ускорения, электронная схема преобразования сигнала и блок интерфейса, электронная схема преобразования сигнала выполнена в виде включенных последовательно блока операционных усилителей, в обратную связь которых включены электронные потенциометры, микроконтроллера и блока интерфейса, при этом коэффициент обратной связи операционного усилителя установлен в зависимости от диапазона измеряемых углов.
Кроме того, в предпочтительном варианте реализации изобретения плата блока системы позиционирования установлена в корпус через амортизатор.
Техническим результатом от использования заявленных способа и системы является повышение надежности работы системы, расширение эксплутационных возможностей, обеспечение аппаратной унификации системы позиционирования путем использования одной и той же аппаратной реализации устройства для измерения разных диапазонов углов и повышение точности измерений в области измерения углов в диапазоне менее 90°.
Обычно измерители уклонов и системы позиционирования в зависимости от назначения имеют различные диапазоны измерения - до 10, до 30, до 45, до 60, до 90 [угл. град.] и для каждого случая изготавливаются отдельно. Указанный выше технический результат, заключающейся в унификации системы позиционирования используемых в различных диапазонах измеряемых уклонов, обусловлен тем, что в процессе изготовления конкретного устройства из группы идентичных по конструкции устройств программно вводят поправку на диапазон измерения, для которого это конкретное устройство предназначено, за счет автоматического изменения коэффициента обратной связи операционного усилителя посредством электронного потенциометра. Это позволяет расширить эксплутационные возможности устройства (например, при необходимости перепрограммировать его на другой диапазон), повысить точность измерения в диапазоне менее 90 угл. град., использовать одну и ту же конструкцию для программирования на разные диапазоны измеряемых углов.
Дополнительным техническим результатом является то, что изобретение позволяет обеспечить возможность корректировки условий измерения от температуры за счет установки платы блока системы позиционирования на компенсатор температурных деформаций. Известно, что одним из недостатков устройства на основе микромеханических акселерометров (далее - ММА) является зависимость их показаний от температуры. Обычно коэффициенты чувствительности для каждого ММА определяются по результатам испытаний в рабочем диапазоне температур и записываются в микропроцессор для осуществления алгоритмической компенсации. Однако полностью компенсировать этим методом температурную погрешность не удаются из-за разных коэффициентов линейного расширения платы блока и корпуса.
Этот недостаток в заявленном устройстве устраняется путем установки платы блока системы позиционирования на корпус через компенсатор температурных деформаций. В этом случае компенсатор температурных деформаций, кроме выполнения своей основной функции, компенсирования разности температурных коэффициентов расширения платы блока и корпуса и прогиба платы выполняет роль амортизатора.
Изобретение поясняется чертежами, на которых изображено следующее.
На фиг.1 представлен общий вид системы позиционирования.
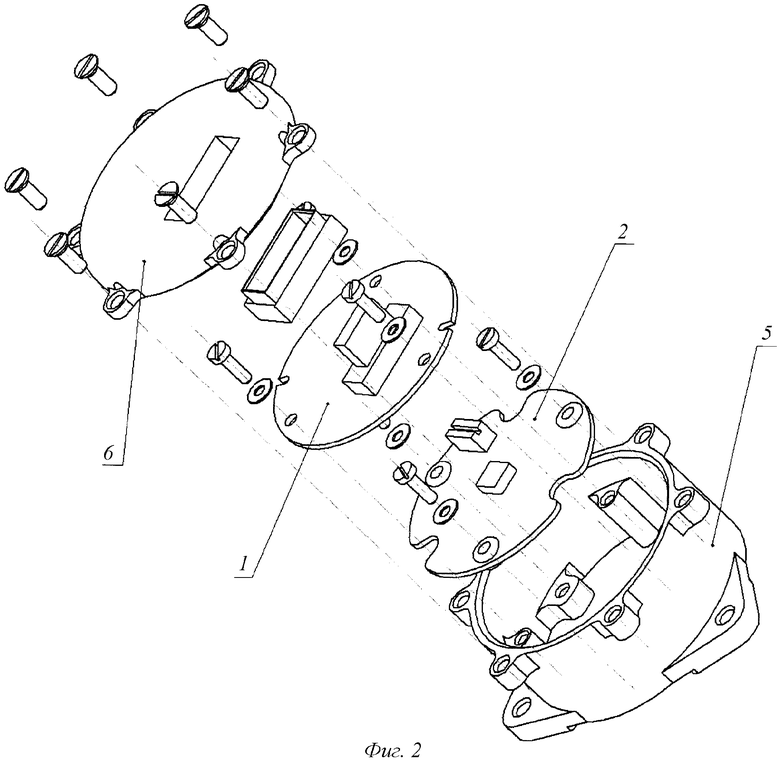
На фиг.2 представлена изометрия системы позиционирования.
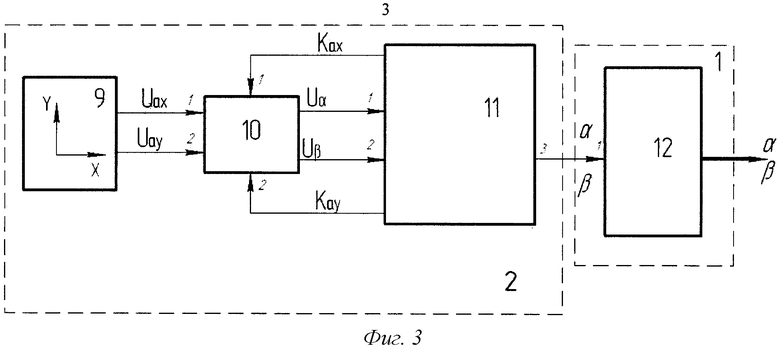
На фиг.3 показана структурная схема системы позиционирования.
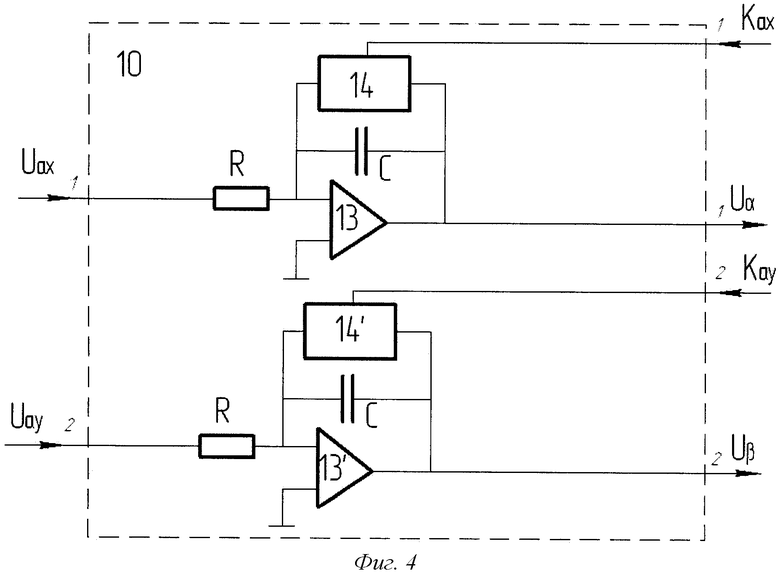
На фиг.4 показана функциональная схема блока операционных усилителей.
Система позиционирования (фиг.1,2) содержит плату блока интерфейса 1 и плату блока 2 системы позиционирования, установленные в корпус 5, выполненный, как правило, из сплава алюминия. Плата блока 2 системы позиционирования установлена на компенсаторах температурных деформаций 3, одновременно выполняющих функцию амортизаторов, внутри корпуса 5 и закреплена с помощью винтов 4.
На внешней поверхности платы интерфейса 1 установлен электрический разъем 8. Корпус 5 закрыт крышкой 6 через резиновую прокладку 7.
В состав блока системы позиционирования 2 входят последовательно соединенные двухкоординатный измеритель ускорения 9, например, на основе микромеханических акселерометров (ММА) и электронная схема преобразования сигнала (фиг.3), включающая блок операционных усилителей 10, микроконтроллер 11, блок интерфейса 12. Блок операционных усилителей 10 (фиг.4) состоит из операционных усилителей 13, в обратную связь которых включены электронные потенциометры 14. При этом первый выход двухкоординатного измерителя ускорения 9 (Uax) соединен с первым входом блока операционных усилителей 10, второй выход двухкоординатного измерителя ускорения (Uay) соединен со вторым входом блока операционных усилителей 10, первый выход которого (Uα) соединен с первым входом микроконтроллера 11, первый выход которого (Ках) соединен с первым входом блока операционных усилителей 10, причем первым входом блока операционных усилителей 10 является вход блока электронных потенциометров 17, второй выход блока операционных усилителей 10 (Uβ) соединен со вторым входом микроконтроллера 11, второй выход которого соединен со вторым входом блока операционных усилителей, третий выход микроконтроллера 11 соединен с входом-выходом 1 блока интерфейса 12.
Работа системы позиционирования осуществляется следующим образом. Сигналы
Uax и Uay с выхода ММА поступают на соответствующие входы блока операционных усилителей. Сигналы Uax и Uay поступают на соответствующие входы блока операционных усилителей, где усиливаются и на выходе

 ,
,
где  ,
,
0<D≤90.
С выходов блока операционных усилителей сигналы Uα и Uβ поступают на входы микроконтроллера, в котором по приведенном выше формулам определяют углы α и β. Величина Kd заложена при изготовлении устройства (при программировании на определенный диапазон) и определяется величиной сигнала, поступающего с микроконтроллера на электронные потенциометры 13 блока операционных усилителей 10.
Способ измерения углов позиционирования заключается в следующем. Двухкоординатный измеритель ускорения силы тяжести 9 выдает напряжение Uax, Uay, пропорциональное действующей величине проекции ускорения на соответствующую ось. Величина этой проекции зависит от положения корпуса измерителя и определяется углом наклона α, β к горизонту из соотношения
 ,
,
 ,
,
где g - ускорение силы тяжести [м/с2];
Uax, Uay - напряжения, снимаемые с микромеханических акселерометров (ММА) по соответствующим осям [В];
Ках, Кау - масштабные коэффициент ММА, имеющие размерность [В*c2/м],
α, β - углы относительно горизонта [угл. град.].
Таким образом, выходное напряжение с измерителя определяется величиной измеряемого угла наклона α, β.
Вычисление измеряемых углов осуществляется по следующим выражениям:

Как указывалось выше, известные из уровня техники измерители уклонов и системы позиционирования в зависимости от назначения имеют различные диапазоны измерения - до 10, до 30, до 45, до 60, до 90 угл. град. и для каждого диапазона углов измерители изготавливаются отдельно. В заявленном изобретении для обеспечения унификации измерителей и повышения точности измерений в области измерения углов в диапазоне менее 90 угл. град. вводят поправку на диапазон измерения. Для этого в микропроцессоре проводят следующие математические операции:
Преимущественно D=10, или 30, или 45, или 60, или 90.
Для повышения точности определения углов, лежащих в пределах от 45 угл. град. до 90 угл. град., вычисления углов проводятся по следующим выражениям:
 ,
,
.
При использовании двухкоординатного измерителя прибор имеет два выхода, напряжения на которых изменяются независимо друг от друга в зависимости от наклона измерителя относительно одной или другой оси или одновременно относительно обоих. При этом способе измерении достаточно двух измерителей линейного ускорения вместо трех. Реализация данного способа измерения непосредственно в системе позиционирования осуществляется путем установки в цепь обратной связи операционных усилителей 13 (фиг.4) электронных потенциометров 14, обеспечивающих коэффициент обратной связи (от 1 до 9) в зависимости от диапазона измеряемых углов. Данная схема включения позволяет изменять коэффициент обратной связи операционного усилителя 13 по команде микропроцессора  в зависимости от диапазона углов, на который рассчитано изготавливаемое устройство. Эта операция осуществляется в процессе изготовления или перепрограммирования устройства.
в зависимости от диапазона углов, на который рассчитано изготавливаемое устройство. Эта операция осуществляется в процессе изготовления или перепрограммирования устройства.
Работа системы позиционирования одинакова при определении значений углов относительно той или другой оси.
Точность измерения углов с использованием заявленной системы позиционирования определяется точностью датчика ускорения силы тяжести (≤0,1% от измеряемого угла) и аналого-цифрового преобразователя (цена младшего разряда - ≤0,1°).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ УКЛОНОВ | 2000 |
|
RU2166732C1 |
| Сейсмокардиоблок и способ измерения сейсмокардиоцикла | 2017 |
|
RU2679296C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| БЛОК БЕСПЛАТФОРМЕННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И ВКЛЮЧАЮЩАЯ ЕГО СИСТЕМА ВИЗУАЛИЗАЦИИ И РЕГИСТРАЦИИ ДВИЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2336496C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| РЕГИСТРАТОР НАРАБОТКИ И ЧАСТОТЫ ВРАЩЕНИЯ ЗАБОЙНОГО ДВИГАТЕЛЯ | 2008 |
|
RU2368770C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ НАРАБОТКИ И ЧАСТОТЫ ВРАЩЕНИЯ ЗАБОЙНОГО ДВИГАТЕЛЯ И ЭЛЕКТРОННЫЙ МОДУЛЬ ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ | 2008 |
|
RU2371573C1 |
Изобретение относится к измерительной технике, в частности к системам позиционирования и устройствам для определения углов наклона объектов и оборудования на производстве и в быту относительно местного горизонта. Техническим результатом изобретения является снижение затрат на производство за счет обеспечения аппаратной унификации позиционирования, а также повышение надежности работы, расширение эксплуатационных возможностей устройства и повышение точности измерения в области измерения углов в диапазоне менее 90°. Способ измерения уклонов включает измерение величины проекции ускорения силы тяжести на ось измерителя ускорения, сигнал с выхода которого, пропорциональный измеряемому углу D, используют для определения угла уклона относительно горизонтальной плоскости, при этом сигнал выхода измерителя ускорения усиливают пропорционально коэффициенту диапазона измеряемых углов. Система измерения уклонов для позиционирования объектов содержит корпус с рабочей поверхностью и размещенную внутри корпуса плату блока системы позиционирования, на которой размещен по меньшей мере один измеритель ускорения, электронная схема преобразования сигнала и блок интерфейса, при этом электронная схема преобразования сигнала выполнена в виде включенных последовательно блока операционных усилителей, в обратную связь которых включены электронные потенциометры, и микроконтроллера, по меньшей мере один измеритель ускорения, электронная схема преобразования сигнала и блок интерфейса последовательно соединены между собой, а коэффициент обратной связи операционных усилителей установлен в зависимости от диапазона измеряемых углов. 2 н. и 1 з.п. ф-лы, 4 ил.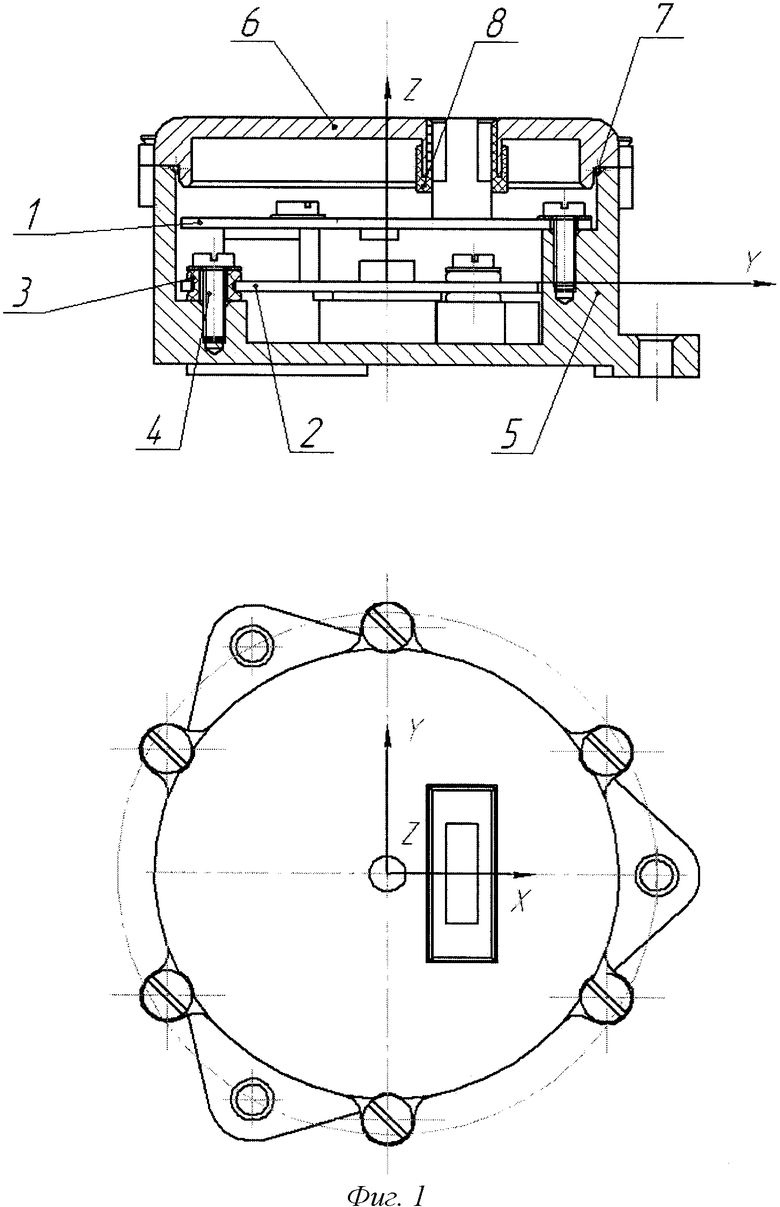
1. Способ измерения уклонов, включающий измерение величины проекции ускорения силы тяжести на ось измерителя ускорения, сигнал с выхода которого, пропорциональный измеряемому углу D, используют для определения угла уклона относительно горизонтальной плоскости, отличающийся тем, что сигнал выхода измерителя ускорения усиливают пропорционально коэффициенту диапазона измеряемых углов, вычисляемому по формуле:
 ,
,
где 0<D≤90;
при этом в зависимости от диапазона измеряемых углов угол уклона относительно горизонтальной плоскости в диапазоне от 0 до 45 угл. град. определяют как:
а в диапазоне от 45 до 90 угл. град. угол уклона относительно горизонтальной плоскости определяют как:

 ,
,
где α, β - угол уклона относительно горизонта, угл. град.;
Uα, Uβ - [В] величина сигнала, равная произведению напряжения снимаемого с измерителя ускорения на коэффициент Kd диапазона измеряемых углов;
Kах, Kау - масштабные коэффициенты измерителя ускорения, В·с2/м;
g - ускорение силы тяжести, м/с2.
2. Система измерения уклонов для позиционирования объектов, содержащая корпус с рабочей поверхностью и размещенную внутри корпуса плату блока системы позиционирования, на которой размещены по меньшей мере один измеритель ускорения, электронная схема преобразования сигнала и блок интерфейса, отличающаяся тем, что электронная схема преобразования сигнала выполнена в виде включенных последовательно блока операционных усилителей, в обратную связь которых включены электронные потенциометры, и микроконтроллера, при этом по меньшей мере один измеритель ускорения, электронная схема преобразования сигнала и блок интерфейса последовательно соединены между собой, а коэффициент обратной связи операционных усилителей установлен в зависимости от диапазона измеряемых углов.
3. Система позиционирования по п.2, отличающаяся тем, что плата блока системы позиционирования установлена в корпус через компенсатор температурных деформаций.
| Датчик уклона землеройной машины | 1986 |
|
SU1812426A1 |
| Устройство для измерения углов наклона | 1985 |
|
SU1318788A1 |
| Способ определения уклона железнодорожного пути и устройство для его осуществления | 1985 |
|
SU1296839A1 |
| СПОСОБ ИЗМЕРЕНИЯ УКЛОНОВ И ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2227899C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ | 2001 |
|
RU2219084C2 |

