Настоящее изобретение касается электронных плат.
В частности, изобретение касается электронных плат, используемых в моделирующих устройствах интеграции, в особенности в моделирующих устройствах для оборудования летательного аппарата.
Соответственно, оно касается системы диагностирования электронных плат.
Моделирующие устройства интеграции используются для обеспечения разработки и интеграции электронных и информационных систем, установленных в летательных аппаратах, в особенности, перед первым полетом.
Моделирующие устройства интеграции содержат, в основном, главный вычислитель (известный под названием «host»), реальное оборудование летательного аппарата и электронный интерфейс, связывающий эти два элемента.
Электронный интерфейс содержит несколько электронных плат, позволяющих ставить оборудование летательного аппарата в реальные условия, такие, например, как определенные метеорологические условия, аварийные условия… Этот интерфейс генерирует или собирает сигналы, управляемые главным вычислителем, предназначенные для моделирования реального оборудования.
Для реализации этого главный вычислитель содержит имитационные модели летательного аппарата и его окружения. Периферийные системы соединены с реальным оборудованием и содержат программы проверки.
Моделирующее устройство интеграции является системой реального времени, что позволяет сказать, что испытания на оборудовании производятся с реальной скоростью их протекания.
Вследствие этого, когда определяется неисправность на уровне электронных плат, необходимо остановить работу моделирующего устройства интеграции, чтобы определить, где точно находится неисправность.
Таким образом, чтобы найти причину неисправности, необходимо установить испытательное оборудование, такое как логический анализатор на шине в режиме реального времени, которая связывает главный вычислитель и электронные платы, и мультиметр или осциллоскоп на входах/выходах электронных плат.
Из факта остановки работы в режиме реального времени интеграционной системы неисправность не всегда видна, и, таким образом, трудно определить ее местонахождение.
Необходимо также тестировать одну или несколько плат на специализированных испытательных стендах, как только одна или несколько плат будут сняты с монтажа моделирующего устройства интеграции.
Существует также система, которая может подключаться к определенным электронным платам, допускающим конфигурирование параметров плат или считывание определенных адресов памяти.
Эта система выдает диагностические команды для анализа работы электронной платы, а также для определения неисправности.
Тем не менее, по ранее указанным причинам это соединение и эти диагностические операции, выполняемые на платах с помощью модуля, выполняются вне работы в реальном времени системы моделирования интеграции.
Такие способы определения неисправности в электронных платах являются малоэффективными и вызывают потерю времени вследствие сложности этих способов.
С другой стороны, когда осуществляется выполнение программ моделирования реального оборудования и когда следует изменить величину определенных параметров, нужно прекратить моделирование, изменить программы моделирования и возобновить моделирование.
Учитывая большое количество времени, необходимое для осуществления этих программ, такой способ действий является неэффективным.
Целью настоящего изобретения является устранение упомянутых ограничений и предложение электронной платы, позволяющей выполнить команду, происходящую из диагностического модуля, и команду, происходящую из моделирующей системы в реальном времени.
Для этого настоящее изобретение, в соответствии с первым аспектом, предлагает электронную плату, содержащую блок обработки.
Электронная плата выполнена с возможностью приема команды, происходящей из диагностического модуля, и команды, происходящей из системы моделирования, и содержит средства управления приоритетом выполнения команды, происходящей из системы моделирования, по отношению к приоритету команды, происходящей из диагностического модуля.
Таким образом, возможно выполнение команды, происходящей из диагностирующего модуля, или команды, происходящей из системы моделирования, без прекращения выполнения в реальном времени команды, происходящей из системы моделирования, или команды, происходящей из диагностического модуля.
В соответствии с предпочтительной характеристикой средства управления выполнены с возможностью вызывать выполнение команды, происходящей из системы моделирования, приоритетно над выполнением команды, происходящей из диагностического модуля.
Таким образом, выполнение команды, происходящей из диагностического модуля, не мешает выполнению в реальном времени команды, происходящей из системы моделирования.
В соответствии с другой предпочтительной характеристикой команда, происходящая из системы моделирования, является преимущественной относительно команды, происходящей из диагностического модуля.
Следовательно, в процессе поступления команды, происходящей из системы моделирования, при выполнении команды, происходящей из диагностического модуля, плата прерывает выполнение команды, происходящей из диагностического модуля, и немедленно начинает выполнение команды, происходящей из системы моделирования.
На практике электронная плата содержит средства запоминания команды, происходящей из диагностического модуля, в электронной плате во время выполнения команды, происходящей из системы моделирования, и средства выполнения команды, происходящей из диагностического модуля, сразу по окончании выполнения команды, происходящей из системы моделирования.
Таким образом, когда команда, происходящая из системы моделирования, находится в процессе выполнения и когда поступает команда, происходящая из диагностического модуля, последняя запоминается в памяти, встроенной в электронную плату, и ожидает, когда закончится выполнение команды, происходящей из системы моделирования для того, чтобы быть выполненной в свою очередь.
Например, команда диагностического модуля представляет собой команду увеличения параметра электронной платы.
Таким образом, команды, поступающие от системы моделирования и диагностического модуля, могут быть выполнены с увеличенными значениями для того, чтобы можно было провести анализы и исследования.
Как вариант команда, происходящая из диагностического модуля, содержит функцию записи величины параметра.
Действительно, интересно при анализе или исследовании знать величины определенных параметров.
Предпочтительно, команды, происходящие из диагностического модуля, выполняются как неприоритетная основная задача.
Таким образом, основная задача определяет конец исполнения команды, происходящей из системы моделирования, и затем приступает к исполнению команды, происходящей из диагностического модуля.
Таким образом, выполнение в реальном времени команды, происходящей из системы моделирования, не нарушается.
Настоящее изобретение в соответствии со вторым аспектом касается электронной платы.
Диагностическая система содержит диагностический модуль и средства управления приоритетом выполнения команды, происходящей из системы моделирования, относительно приоритета команды, происходящей из диагностического модуля.
Таким образом, диагностическая система электронной платы способна определять приоритет выполнения команд, происходящих из диагностического модуля, и системы моделирования без остановки в реальном времени выполнения команд.
Эти средства управления приоритетом выполнения команд являются средствами управления приоритетом команд электронной платы, описанной выше.
Эта диагностическая система имеет характеристики и преимущества, аналогичные ранее описанным в отношении электронной платы.
Третьим аспектом настоящего изобретения является способ выполнения команды системы моделирования и команды диагностического модуля, осуществляемый электронной платой в соответствии с изобретением.
Этот способ имеет характеристики и преимущества, аналогичные ранее описанным в отношении электронной платы, которые не будут упоминаться в дальнейшем.
Изобретение касается способа моделирования с помощью электронной платы команды, происходящей из диагностического модуля, и команды, происходящей из системы моделирования, включающего этап управления приоритетом выполнения команды, происходящей из системы моделирования, по отношению к приоритету команды, происходящей из диагностического модуля.
В соответствии с предпочтительной характеристикой выполнение команды, происходящей из системы моделирования, является приоритетным по отношению к выполнению команды, происходящей из диагностического модуля.
Кроме того, команда, происходящая из системы моделирования, является преимущественной относительно команды, происходящей из диагностического модуля.
В соответствии с предпочтительной характеристикой способ содержит следующие этапы:
- запоминание команды, происходящей из диагностического модуля, во время выполнения команды, происходящей системы моделирования, и
- выполнение команды, происходящей из диагностического модуля, сразу по окончании выполнения команды системы моделирования.
Например, способ содержит выполнение команды, происходящей из диагностического модуля, при этом команда является командой увеличения значения параметра.
Как вариант способ содержит выполнение команды, происходящей из диагностического модуля, при этом команда содержит функцию записи значения параметра.
В соответствии с другой предпочтительной характеристикой команда, происходящая из диагностического модуля, выполняется в качестве неприоритетной основной задачи.
Настоящее изобретение направлено также на применение электронной платы и способа выполнения в соответствии с изобретением для анализа неисправности электронной платы, встроенной в моделирующее устройство интеграции.
Таким же образом настоящее изобретение направлено на применение диагностической системы для анализа неисправности электронной платы, встроенной в моделирующее устройство интеграции.
Более того, моделирующее устройство интеграции является моделирующим устройством интеграции оборудования летательного аппарата.
В дальнейшем изобретение поясняется нижеследующим описанием, не являющимся ограничительным, со ссылкой на сопровождающие чертежи, на которых:
- фиг.1 схематично изображает моделирующее устройство интеграции и
- фиг.2 схематично изображает обработку команд электронной платой в соответствии с изобретением в моделирующем устройстве интеграции по фиг.1.
Далее со ссылками на фиг.1 и 2 будет описано моделирующее устройство интеграции, содержащее диагностическую систему и электронную плату в соответствии с изобретением.
Моделирующее устройство интеграции 1 содержит реальное оборудование 2, систему 3 моделирования и электронный интерфейс 4, расположенный между ними.
Реальное оборудование 2 представляет собой в качестве примера кабину летательного аппарата, авиационные вычислители, приводные механизмы рулевых поверхностей или электрические и гидравлические генераторы.
Это оборудование 2 не обязательно является реальной системой летательного аппарата, оно может также быть моделью, использованной для проектирования последнего.
В данном случае системой 3 моделирования является главный вычислитель.
Главный вычислитель 3 моделирует летательный аппарат и окружающую его среду и передает команды моделирования оборудованию.
Передача этих команд осуществляется, например, как только главный вычислитель 3 передал команду начала (предназначенную для запуска работы системы интеграции), а также конфигурационную команду системы интеграции.
Главный вычислитель 3 образован, например, серверами с высокой вычислительной мощностью.
Используемым сервером является, например, сервер, известный под наименованием «alpha server ES45», выпускаемый компанией Hewlett Packard.
Электронный интерфейс 4 содержит электронные платы, позволяющие поставить оборудование летательного аппарата в реальные ситуации в процессе моделирования сигналов, передаваемых главным вычислителем 3, предназначенных для моделирования реального оборудования 2.
В качестве примера, этими платами являются платы типа ARINC 429 или AFDX.
Электронный интерфейс 4 соединен с главным вычислителем с помощью высокоскоростной шины 5.
Одновременно шина соединяет электронные платы между собой.
В качестве примера, шиной является шина, известная под названием VME («Versa Module Eurocard»), которая является стандартной шиной, известной в промышленности. Эта шина особенно хорошо приспособлена для соединения различных электронных плат с главным вычислителем 3. Она адаптирована к управлению входами/выходами.
Когда обнаруживают, что одна из электронных плат имеет неисправность, или когда хотят увеличить значение определенных параметров электронных плат, диагностический модуль 6 подключают к электронной плате 4.
Диагностический модуль 6 представляет собой, например, персональный компьютер. Соединение между диагностическим модулем 6 и электронной платой 4 осуществляется, например, через последовательный порт RS232 этого компьютера.
Диагностический модуль 6 предназначен для передачи диагностических команд 11 для получения обратной информации о работе электронной платы 4, а также для увеличения значений параметров электронных плат 4. Таким образом, благодаря этим диагностическим командам 11 возможно анализировать поведение электронной платы 4 с целью определения установленной неисправности в процессе испытаний интеграции оборудования или в фазе проектирования оборудования.
Электронная плата 4 содержит микропроцессор 7 и память 8.
Микропроцессор 7 предназначен для выполнения команд 10, 11, которые электронная плата 4 получает от главного вычислителя 3 и диагностического модуля 6.
Когда команды 10, 11 (от главного вычислителя 3 и диагностического модуля 6) поступают на электронную плату 4, они устраняют отключения 9а, 9b. Эти команды 10, 11 имеют разный приоритет в соответствии с типом команды.
Электронная плата 4 предназначена для управления порядком управления этих команд 10, 11.
Так, когда плата 4 выполняет команду 10, происходящую из главного вычислителя 3, и когда происходит устранение отключения диагностического модуля 9а при получении команды 11, происходящей из диагностического модуля 6, или когда плата 4 выполняет команду 11, происходящую из диагностического модуля 6, и происходит устранение отключения главного вычислителя 9b при получении команды 10 от главного вычислителя 3, то эта плата 4 приспособлена для управления этими сценариями путем управления приоритетом отключений в зависимости от происхождения и типа команд.
Диагностическая система содержит также диагностический модуль 6, а также средства, необходимые для осуществления управления приоритетом отключений 9а, 9b.
Главный вычислитель предоставляет время микропроцессору 8 электронной платы для выполнения команд 10, 11.
В качестве показательного примера это время составляет 10 мксек; время выполнения команды 10, происходящей из главного вычислителя, составляет 8 мксек; и время выполнения команды 11, происходящей из диагностического модуля 6, составляет 2 мксек.
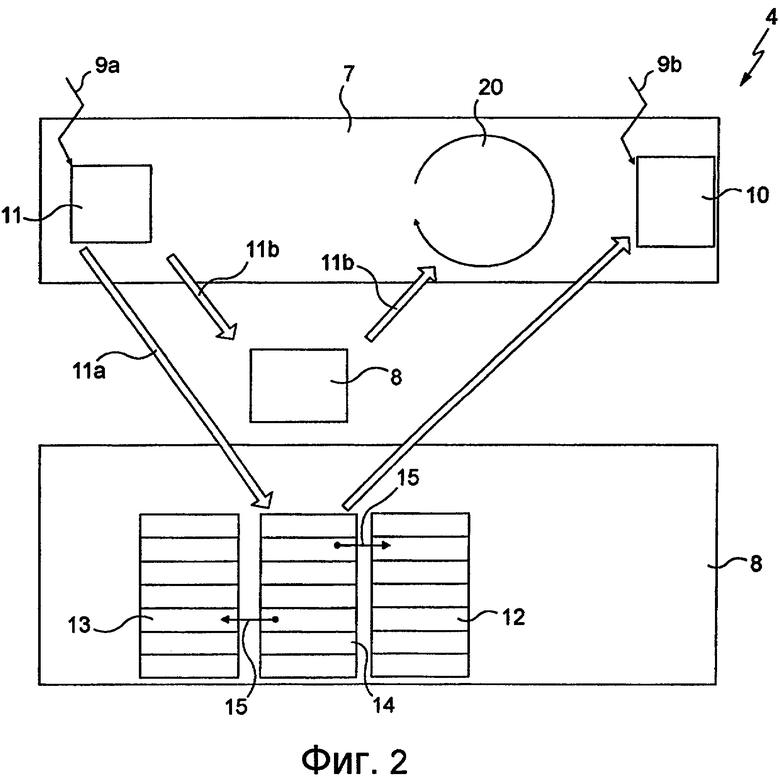
Далее со ссылкой на фиг.2 будет описано управление приоритетами электронной платы 4.
На фиг.2 представлены встроенные в электронную плату 4 микропроцессор 7 и память 8.
Как уже указывалось в этом документе, электронная плата 4 получает команды 10, происходящие из главного вычислителя 3, и команды 11, происходящие из от диагностического модуля 6, которые выполняются при отключении 9а, 9b. Эти отключения 9а, 9b имеют различные приоритеты исполнения.
Следует отметить, что в этом примере команды 10, происходящие из главного вычислителя 3, поступают на электронную плату по шине VME 5 для соединения между ними.
Команды, происходящие из диагностического модуля 6, поступают на электронную плату 4 через последовательный порт RS232 между диагностическим модулем 6 и электронной платой 4.
Существуют различные типы команд, поступающих от диагностического модуля 6.
Команды, происходящие из диагностического модуля 6, содержат двоичный код, представляющий тип команды и позволяющий, таким образом, микропроцессору 7 опознать тип команды 11, поступившей на электронную плату 4.
Наиболее высоким приоритетом обладает приоритет команд 10 от главного вычислителя 3. Таким образом, когда команда 10, происходящая из главного вычислителя 3, выполняется в микропроцессоре 7 и когда поступает команда 11, происходящая из диагностического модуля, микропроцессор продолжает выполнение команды 10, происходящей из главного компьютера 3, и после ее выполнения он начинает выполнение команды 11, происходящей из диагностического модуля 6.
Команды 10, происходящие из главного вычислителя 3, являются преимущественными по отношению к командам 11, происходящим из диагностического модуля 6.
Таким образом, когда команда 11, происходящая из диагностического модуля, выполнена и отключение 9b устранено поступлением команды 10, происходящей от главного вычислителя 3, выполнение команды 11, происходящей из диагностического модуля, останавливается и начинается выполнение команды 10, происходящей из главного вычислителя 3.
Действительно, отключение 9а, 9b высшего приоритета учитывается при обработке другого отключения 9а, 9b, но отключение 9а, 9b низшего приоритета ставится в очередь.
По окончании выполнения команды 10, происходящей из главного вычислителя 3, вновь начинается выполнение команды 11, происходящей из диагностического модуля, в том месте, где она была остановлена.
Когда команды 11, происходящие из диагностического модуля 6, поступают на электронную плату 4 и когда микропроцессор 7 занят выполнением команды, команды 11, происходящие из диагностического модуля 6, запоминаются во встроенной памяти 8 на электронной плате 8, дожидаясь исполнения.
Память 8 является, например, энергозависимым запоминающим устройством типа FIFO ("первым получен - первым выдан").
Разумеется, когда ни одна команда 10, происходящая из главного вычислителя 3, не выполняется в микропроцессоре 7, встроенном в электронную плату 4, и поступает команда, происходящая из диагностического модуля 6, нет необходимости запоминать команду. Команда может быть непосредственно выполнена.
Отключение 9а, вызванное командами 11, происходящими из диагностического модуля 6, или диагностическими командами 11, имеют второй приоритет.
Следует отметить, что отключение по второму приоритету имеет более низкий приоритет, чем первый приоритет.
Когда выполняется команда 10, происходящая из главного вычислителя 3, и поступает диагностическая команда 11, то эта диагностическая команда запоминается во встроенной памяти 8. Диагностические команды 11 выполняются в порядке поступления на плату 4 и, таким образом, в порядке запоминания в памяти 8.
Диагностические команды 11 выполняются основной задачей 20. Эта основная задача определяет моменты времени, когда микропроцессор 7 является неактивным, и выполняет диагностические команды 11, запомненные в памяти 8 и ожидающие выполнения.
В данном случае команды 11, происходящие из диагностического модуля 6, являются, в частности, двух типов.
Первый тип диагностической команды 11 является командой увеличения 11а (термин увеличение, в данном случае, известен под термином «ввод»).
В этом варианте осуществления команда увеличения 11а заключается в увеличении параметра электронной платы 4 до величины, определенной в команде увеличения 11а.
Этот параметр может быть параметром на входе или выходе платы или промежуточным параметром, используемым для внутренних вычислений.
Таким образом, с помощью команды увеличения 11а возможно увеличить выходные параметры платы, соответствующие параметрам на входе реального оборудования 2 или же входным параметрам главного вычислителя 3, а также увеличить конфигурационные параметры электронной платы 4.
За выполнением этой команды увеличения 11а может следовать выполнение команды 10, происходящей из главного вычислителя 3, или другой команды 11, происходящей из диагностического модуля 6. Таким образом, команда 10, 11 выполняется с учетом увеличенных и нереальных значений.
Эта функция используется, например, тогда, когда нужно проанализировать команду 10, 11, когда выход зафиксирован на одном значении.
Следует отметить, что в процессе выполнения команды увеличения 10а на некоторых входных или выходных параметрах электронной платы 4 одновременно может выполняться команда, происходящая из главного вычислителя 3, если эта последняя команда не использует входные или выходные параметры, используемые командой увеличения 11а.
Очевидно, что если команда, происходящая из главного вычислителя 3, использует параметры, которые будут увеличены командой увеличения 11а, команда увеличения 11а начнет выполняться только после того, как окончится выполнение команды 10, происходящей из главного вычислителя 3.
Эта команда увеличения 11а выполняется следующим образом.
Память 8, встроенная в электронную плату 4, содержит зону памяти, включающую в себя таблицу, содержащую значения параметров, используемых при выполнении команды, также называемую таблицей 12 реальных значений.
Память 8 содержит также зону памяти, включающую в себя таблицу, зарезервированную для увеличенных значений, называемую также таблицей 13 увеличенных значений.
Наконец, память включает в себя зону памяти, содержащую таблицу 14 указателей, используемых при выполнении команд.
Когда команда 11, происходящая из диагностического модуля, является командой увеличения 11а, и как только закончено выполнение команды 10, происходящей из главного вычислителя 3, увеличенное значение запоминается в таблице 13 увеличенных значений и указатель 15 доступа к таблице реальных значений 15 укажет, таким образом, в таблице 13 увеличенные значения.
Таким образом, выполнение последующей команды 10, 11 (поступающей от главного вычислителя 3 и диагностического модуля 6) будет выполняться с увеличенными значениями, а не с реальными значениями.
Когда необходимо завершение моделирования с увеличенными значениями, принимается команда 11, происходящая из диагностического модуля, указывающая окончание увеличения.
Таким образом, выполнение последующей команды 10, 11 (поступающей от главного вычислителя 3 и диагностического модуля 6) будет выполняться с реальными значениями.
Второй тип команды 11, происходящей из диагностического модуля 6, содержит функцию 11b записи параметра.
В этом варианте осуществления возможно несколько типов функции записи.
Первый тип функции 11b записи состоит в наблюдении за значениями параметров, полученных главным вычислителем 3, или за значениями параметров, направленных главным вычислителем в электронную плату 4.
Предназначенные для записи параметры определяются диагностическим модулем 6. Диагностический модуль 6 присваивает параметру, подлежащему записи, идентификационный знак о подлежащей выполнению записи.
В коде, выполняемом диагностической командой 11b, предусмотрены метки записи.
Таким образом, в качестве примера, когда параметр изменяет значение до предусмотренной в коде метки записи, значение определенного параметра записывается в этот момент.
Таким же образом возможно отслеживать во времени изменение параметра (известно как английский термин мониторинг).
Подлежащие записи параметры определяются также диагностическим модулем 6 с помощью идентификационных знаков о подлежащей выполнению записи, присвоенных подлежащему записи параметру.
В этом случае запись осуществляется периодически.
Записанные значения запоминаются в памяти 8, встроенной в электронную плату 4. Далее им придается форма основной задачей 20 и они направляются в диагностический модуль 6.
Вторым типом функции 11b записи является опрашивание конфигурационных параметров электронной платы 4.
Третьим типом функции 11b записи является опрашивание состояний функционирования электронной платы.
Эти рабочие состояния могут быть, например, состоянием инициализации электронной платы, состояние выполнения команд, состояние ошибки.
Четвертым типом функции 11b записи является опрашивание неисправных состояний электронной платы 4. Эта функция позволяет определить неисправность и найти затем ее причину.
Разумеется, системой диагностики могут выполняться и другие функции.
Так, благодаря изобретению возможно выполнять команды диагностического модуля без нарушения выполнения в реальном времени команды, происходящей из системы моделирования.
Следовательно, когда обнаружена неисправность на уровне электронной платы, возможно определить происхождение неисправности без остановки выполнения в реальном времени команды, происходящий из системы моделирования. Таким образом, происхождение неисправности определяется быстро и эффективно.
Кроме того, возможно увеличить значения параметров электронной платы без остановки и нарушения работы в реальном времени моделирующего устройства интеграции.
Разумеется, в описанный выше пример осуществления могут быть внесены различные модификации без выхода за рамки изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА МОДЕЛИРОВАНИЯ В РЕАЛЬНОМ ВРЕМЕНИ ОКРУЖЕНИЯ ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2586796C2 |
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ ПРОГРАММНОГО И АППАРАТНОГО ОБЕСПЕЧЕНИЯ ПОЛЁТНОГО КОНТРОЛЛЕРА | 2023 |
|
RU2799166C1 |
| Аппаратно-программная платформа стенда полунатурного моделирования для отработки вычислителя беспилотного летательного аппарата | 2021 |
|
RU2771111C1 |
| Устройство для моделирования цифровых объектов | 1976 |
|
SU610114A1 |
| СИСТЕМЫ И СПОСОБЫ МОДЕЛИРОВАНИЯ И ПРИВЕДЕНИЯ В ДЕЙСТВИЕ БАРЬЕРОВ БЕЗОПАСНОСТИ | 2012 |
|
RU2582606C2 |
| Автономное интегрированное устройство регистрации параметров авиационного газотурбинного двигателя | 2017 |
|
RU2664901C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО МОДЕЛИРОВАНИЯ И ИСПЫТАНИЙ | 2017 |
|
RU2661539C1 |
| ПИЛОТАЖНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2004 |
|
RU2263973C1 |
Настоящее изобретение касается электронных плат, используемых в моделирующих устройствах интеграции. Техническим результатом является повышение быстродействия и создание электронной платы, позволяющей выполнить команду, происходящую из диагностического модуля, и команду, происходящую из моделирующей системы в реальном времени. Технический результат достигается за счет электронной платы (4), содержащей блок обработки (7), предназначенный для приема команды, происходящей из диагностического модуля (6), и команды, происходящей из системы (3) моделирования; электронная плата (4) содержит средства управления приоритетом выполнения команды, происходящей из системы (3) моделирования, по отношению к команде, происходящей из диагностического модуля (6), а диагностическая система электронной платы содержит диагностический модуль и средства управления приоритетом выполнения команд. 4 н. и 6 з.п. ф-лы, 2 ил.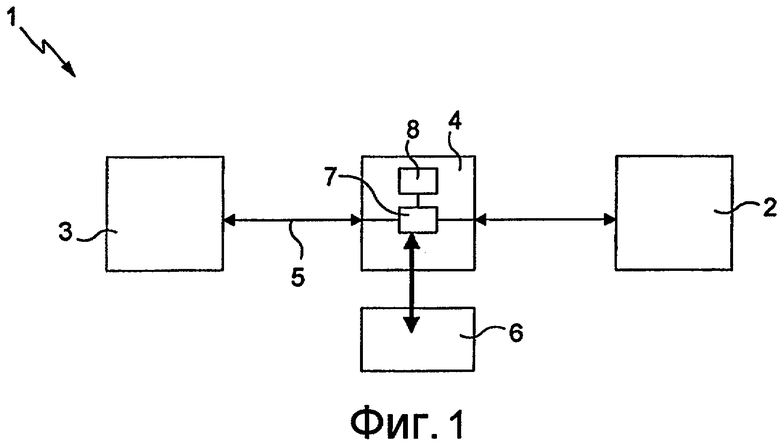
1. Электронная плата (4) для управления приоритетом команд, содержащая блок обработки (7), отличающаяся тем, что она выполнена с возможностью приема команды, происходящей из диагностического модуля (6) и команды, происходящей из системы (3) моделирования, и тем, что она содержит средства управления приоритетом выполнения команды, происходящей из системы (3) моделирования, относительно приоритета команды, происходящей из диагностического модуля (6), при этом упомянутая электронная плата подключена к диагностическому модулю и к системе моделирования.
2. Электронная плата (4) по п.1, отличающаяся тем, что упомянутые средства управления выполнены с возможностью вызывать приоритетное выполнение команды, происходящей из системы (3) моделирования, над выполнением команды, происходящей из диагностического модуля (6).
3. Электронная плата (4) по одному из пп.1 или 2, отличающаяся тем, что команда, происходящая из системы (3) моделирования, является преимущественной по отношению к команде, происходящей из диагностического модуля (6).
4. Электронная плата (4) по п.1, отличающаяся тем, что она содержит средства запоминания команды, происходящей из диагностического модуля (6), на электронной плате (4) во время выполнения команды, происходящей из системы (3) моделирования, и средства выполнения упомянутой команды, происходящей из диагностического модуля (6) по окончании выполнения упомянутой команды, происходящей из системы (3) моделирования.
5. Электронная плата (4) по п.1, отличающаяся тем, что команда, происходящая из диагностического модуля (6), является командой (11а) увеличения величины параметра электронной платы (4).
6. Электронная плата (4) по п.1, отличающаяся тем, что команда, происходящая из диагностического модуля (6), содержит функцию записи величины параметра.
7. Электронная плата (4) по п.6, отличающаяся тем, что команды (11b), происходящие из диагностического модуля, выполняются неприоритетной основной задачей (20).
8. Система диагностики электронной платы (4), отличающаяся тем, что она содержит диагностический модуль (6) и электронную плату по п.1.
9. Способ моделирования посредством электронной платы (4), отличающийся тем, что он содержит выполнение электронной платой команды, происходящей из диагностического модуля (6), подключенного к электронной плате, и команды, происходящей из системы (3) моделирования, подключенной к электронной плате, и тем, что он содержит этап управления приоритетом выполнения команды, происходящей из системы (3) моделирования, относительно приоритета команды, происходящей из диагностического модуля (6).
10. Применение электронной платы (4) по одному из пп.1-7, осуществляющей способ по п.9 для анализа неисправности электронной платы (4), встроенной в моделирующее устройство (1).
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| EP 683463 A2, 22.11.1995 | |||
| Контактный детектор | 1925 |
|
SU7877A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

