1. Область применения
Настоящее изобретение относится к способу обработки изображений, в частности к определению линии поверхности земли, то есть граничной линии на изображении между областью строения и областью поверхности земли.
2. Уровень техники
В настоящее время ведутся разработки, относящиеся к созданию трехмерных (3D) изображений из цветных изображений. В таких разработках эффективной является методика обработки изображений, предусматривающая выделение на изображении области поверхности земли, области строения и области неба и определяющая линию поверхности земли, которая является граничной линией между областью строения и областью поверхности земли.
Когда линия поверхности земли определена, трехмерная модель может быть построена разделением изображения по линии поверхности земли и выстраиванием на изображении вертикальной структуры. Такое моделирование изображений применимо при кодировании объектно-основанным методом Экспертной Группы по Кинематографии MPEG-4 (Motion Pictures Experts Group) и подобными ему методами. В частности, при восстановлении трехмерного изображения из двухмерного изображения городского пейзажа, в котором присутствуют рукотворные сооружения, способ определения линии поверхности земли может значительно повлиять на эффективность обработки изображений.
Сущность изобретения
В одном из аспектов настоящего изобретения, относящегося к трехмерному моделированию изображения, предложен способ и устройство для определения на изображении линии поверхности земли между строением и поверхностью земли.
В другом аспекте настоящего изобретения также обеспечены способ и устройство для автоматического определения линии поверхности земли на исходном двухмерном изображении.
Еще одним аспектом настоящего изобретения также является способ и устройство для эффективного определения линии поверхности земли на изображении, где присутствует несколько строений.
Согласно еще одному аспекту настоящего изобретения обеспечен способ определения на изображении линии поверхности земли, предусматривающий выбор на изображении нескольких линий-кандидатов поверхности земли, установление полосы, центральная линия которой является границей между поверхностью земли (З) и другими областями на карте изображения “Земля-Строение-Небо” (ЗСН-карте), и определение линии поверхности земли на изображении путем выбора из нескольких линий-кандидатов поверхности земли такой линии-кандидата поверхности земли, которая в наибольшей степени находится в пределах установленной полосы.
В еще одном аспекте настоящего изобретения этот способ также обеспечивает выявление совокупности горизонтальных прямых, принадлежащих области строений (С) изображения, и выбор нескольких линий-кандидатов поверхности земли с помощью этой совокупности горизонтальных прямых.
В еще одном аспекте настоящего изобретения способ выявления совокупности горизонтальных прямых, принадлежащих области С изображения, включает в себя выбор на изображении совокупности прямых линий, выявление среди этих прямых линий горизонтальных прямых и выявление среди горизонтальных прямых нескольких горизонтальных прямых, принадлежащих области С.
В еще одном аспекте настоящего изобретения способ выявления совокупности горизонтальных прямых среди прямых линий включает в себя сравнение области С на ЗСН-карте изображения с совокупностью горизонтальных прямых и определение совокупности горизонтальных прямых, принадлежащих области С.
В еще одном аспекте настоящего изобретения заявленный способ дополнительно включает в себя кластеризацию горизонтальных прямых на несколько групп, при этом определение нескольких линий-кандидатов поверхности земли дополнительно включает в себя определение на изображении нескольких линий-кандидатов поверхности земли на основании групп, полученных кластеризацией совокупности горизонтальных прямых.
В еще одном аспекте настоящего изобретения заявленный способ дополнительно включает в себя определение точки схода для каждой группы, определение вертикальной граничной линии между группами и выявление прямой, проходящей через несколько точек вертикальной граничной линии и точку схода каждой группы.
В еще одном аспекте настоящего изобретения определение линии поверхности земли на изображении включает в себя установление полосы, центральная линия которой является границей между областью поверхности земли (З) и другими областями на ЗСН-карте изображения, а определение линии поверхности земли на изображении зависит от степени, в которой каждая из нескольких линий-кандидатов поверхности земли находится в пределах установленной полосы.
Согласно другому аспекту настоящего изобретения обеспечен способ определения линии поверхности земли, включающий в себя выбор на изображении совокупности прямых линий, определение нескольких линий-кандидатов поверхности земли с использованием точки схода этой совокупности прямых и определение линии поверхности земли на изображении на основании совокупности линий поверхности земли с использованием ЗСН-карты изображения.
Дополнительные аспекты, признаки и/или преимущества изобретения будут частично изложены в последующем описании и частично будут очевидны из этого описания или же могут быть выведены из практических реализаций заявленного изобретения.
Краткое описание чертежей
Эти и/или другие аспекты, признаки и преимущества изобретения будут более очевидны и более понятны из последующего описания примеров реализации, рассматриваемых со ссылкой на прилагаемые чертежи, где:
на фиг.1 представлена блок-схема, иллюстрирующая способ определения линии поверхности земли изображения согласно одному из примеров реализации настоящего изобретения;
на фиг.2 показано исходное изображение согласно одному из примеров реализации настоящего изобретения;
на фиг.3 представлена карта “Земля-Строения-Небо” (ЗСН-карта), выделенная из исходного изображения, представленного на фиг.2, согласно одному из примеров реализации настоящего изобретения;
на фиг.4 представлена блок-схема, иллюстрирующая процесс выбора из совокупности горизонтальных прямых нескольких горизонтальных прямых, принадлежащих области строений для одного из примеров реализации настоящего изобретения;
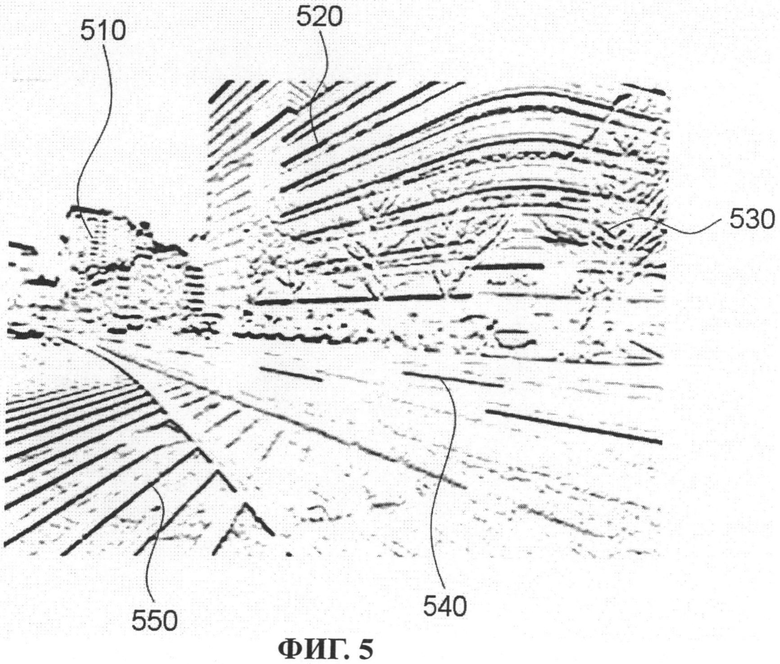
на фиг.5 показана совокупность горизонтальных прямых, выбранных на изображении, представленном на фиг.2, согласно одному из примеров реализации настоящего изобретения;
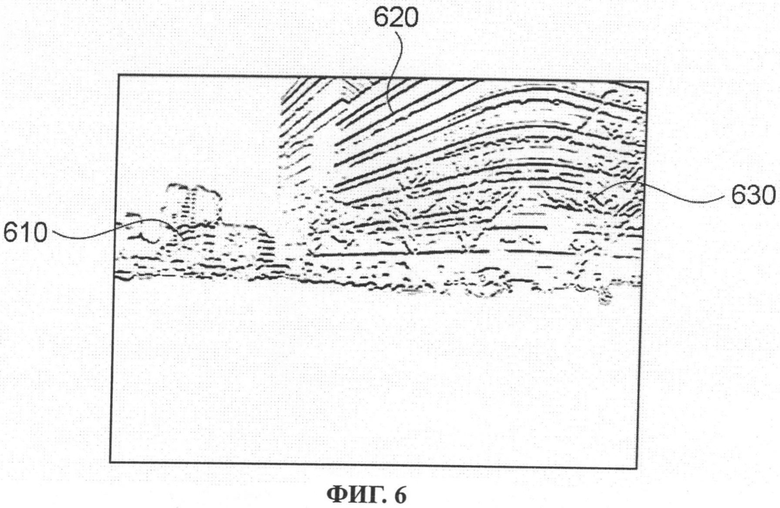
на фиг.6 показана совокупность горизонтальных прямых, относящихся к области строения, выбранная на изображении, представленном на фиг.5, согласно одному из примеров реализации настоящего изобретения;
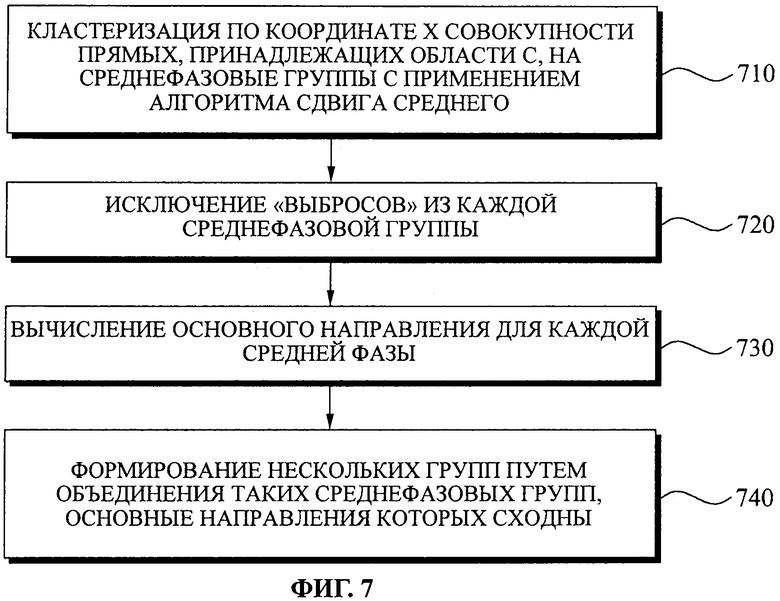
на фиг.7 представлена блок-схема, иллюстрирующая процесс кластеризации совокупности горизонтальных прямых, принадлежащих к области строений, на несколько групп, согласно фиг.6, согласно одному из примеров реализации настоящего изобретения;
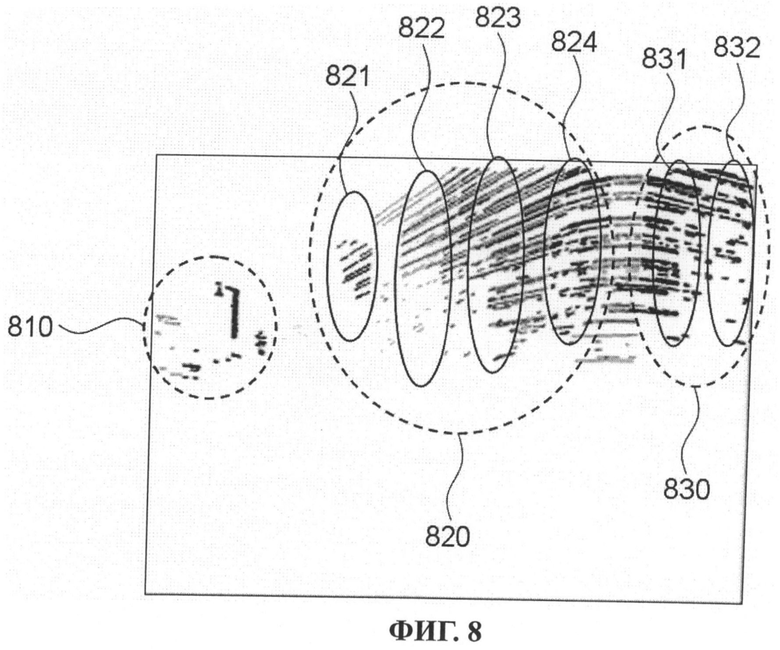
на фиг.8 показано несколько групп, полученных кластеризацией изображения, представленного на фиг.6, согласно одному из примеров реализации настоящего изобретения;
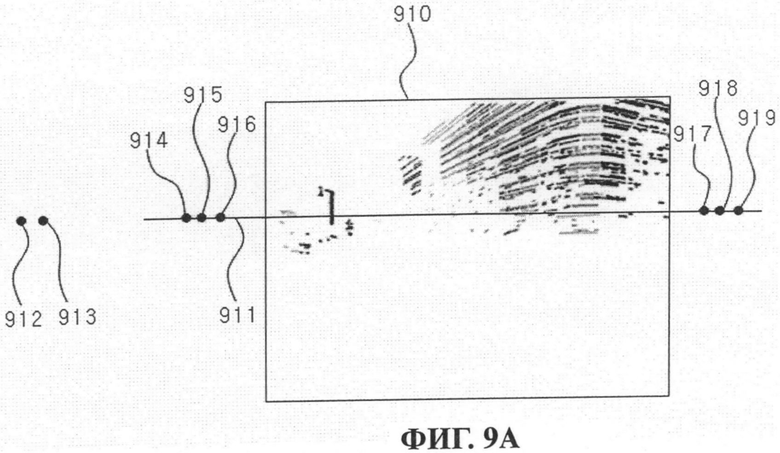
на фиг.9А показаны точки схода для каждой из нескольких групп, представленных на фиг.8, согласно одному из примеров реализации настоящего изобретения;
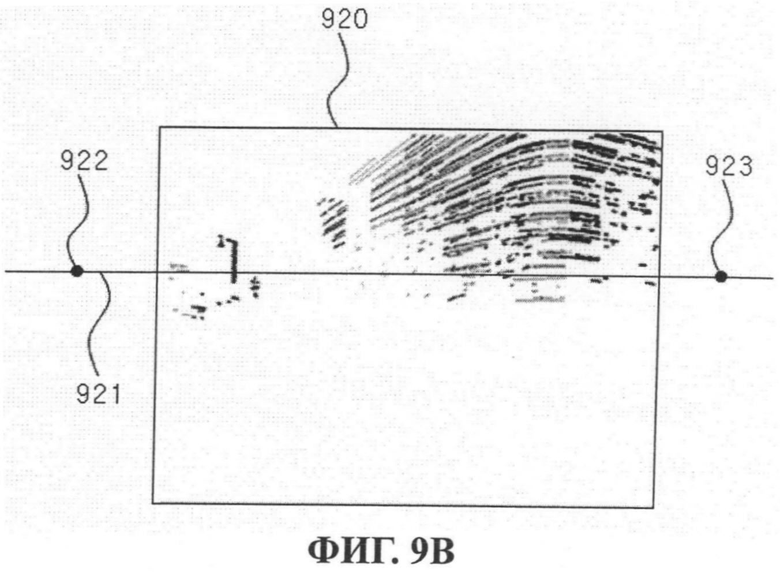
на фиг.9В показаны окончательно определенные точки схода для каждой из нескольких групп, представленных на фиг.8, согласно одному из примеров реализации настоящего изобретения;
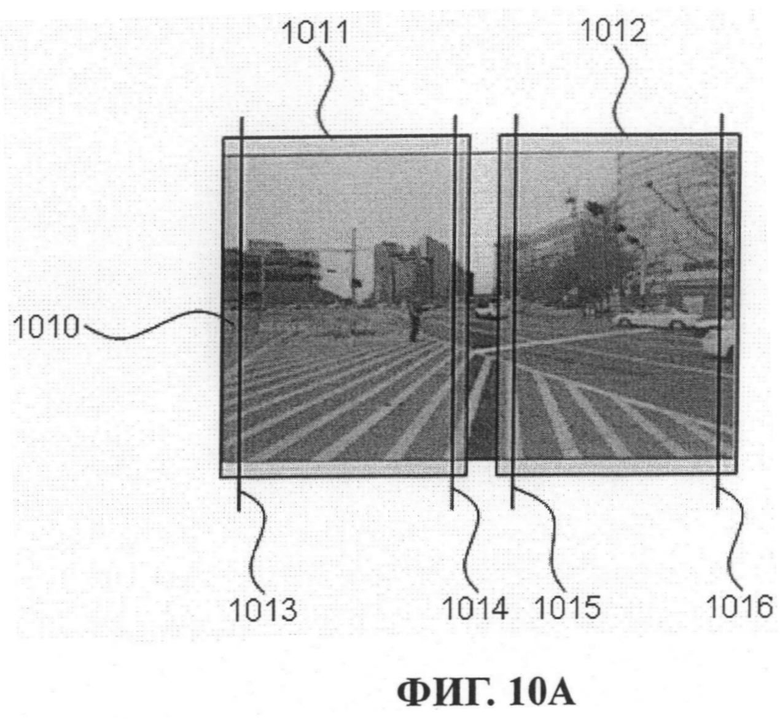
на фиг.10А показаны выбранные границы нескольких групп для определения вертикальной граничной линии между этими несколькими группами согласно одному из примеров реализации настоящего изобретения;
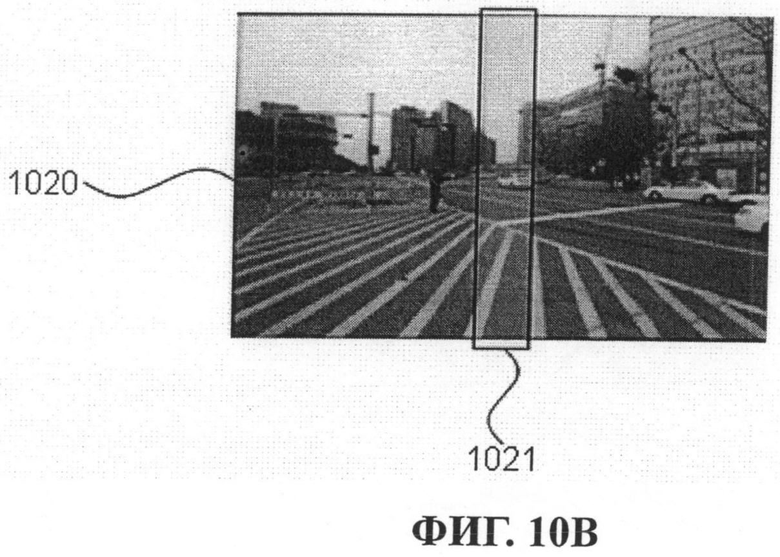
на фиг.10В показана выбранная область между несколькими группами для определения вертикальной граничной линии между этими несколькими группами согласно одному из примеров реализации настоящего изобретения;
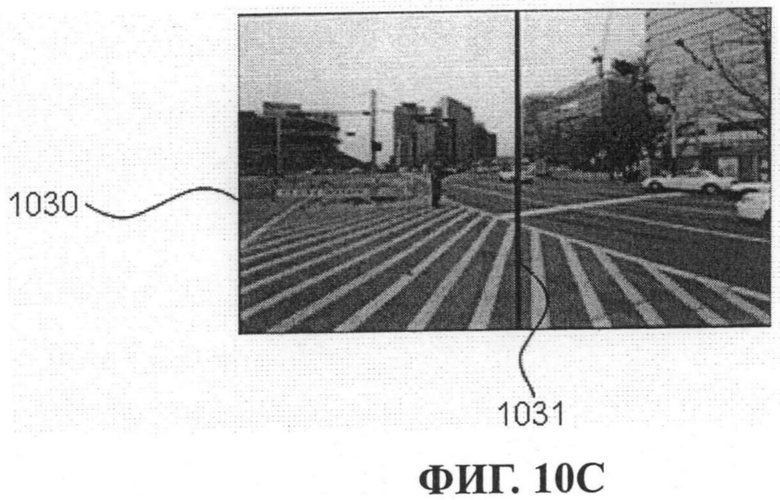
на фиг.10С показан пример изображения, полученного в результате определения вертикальной граничной линии между несколькими группами согласно одному из примеров реализации настоящего изобретения;
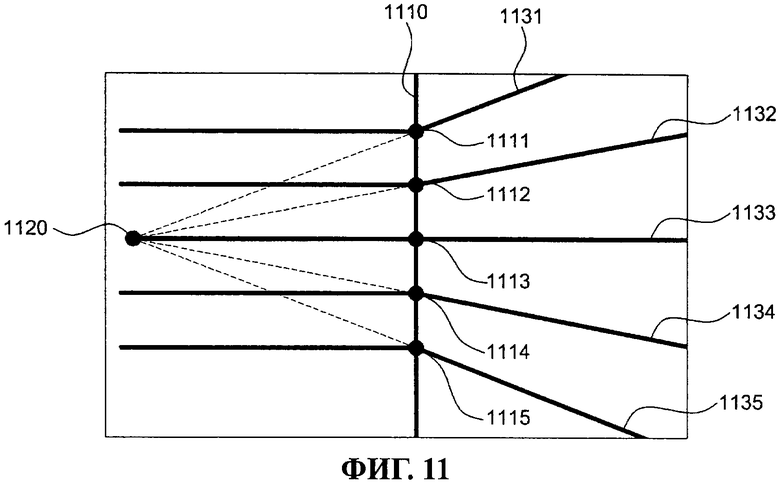
на фиг.11 показано несколько линий-кандидатов поверхности земли с изображения, представленного на фиг.10, согласно одному из примеров реализации настоящего изобретения;
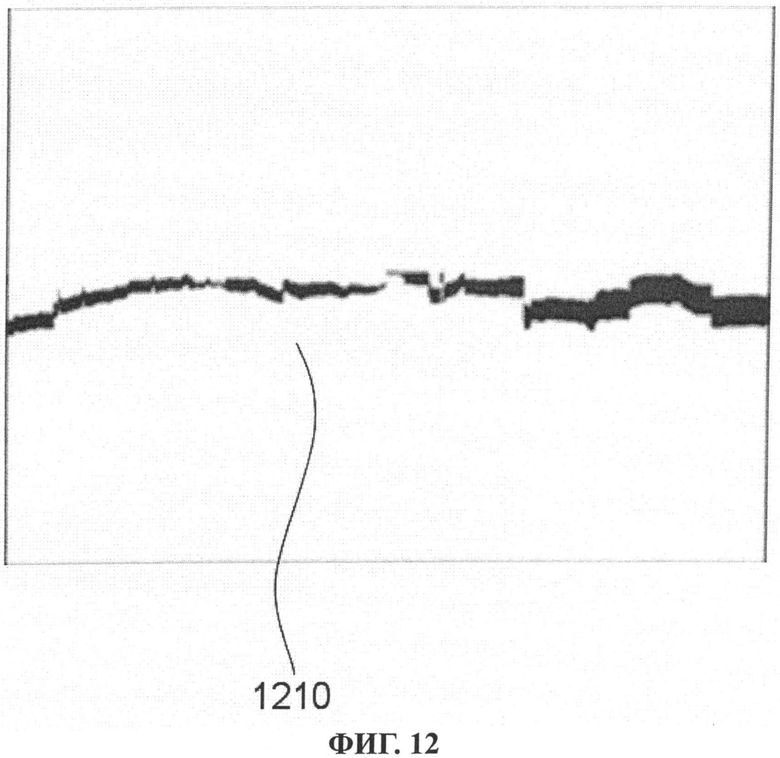
на фиг.12 показано установление полосы, центральная линия которой является границей между областью З и другими областями на ЗСН-карте изображения согласно одному из примеров реализации настоящего изобретения; и
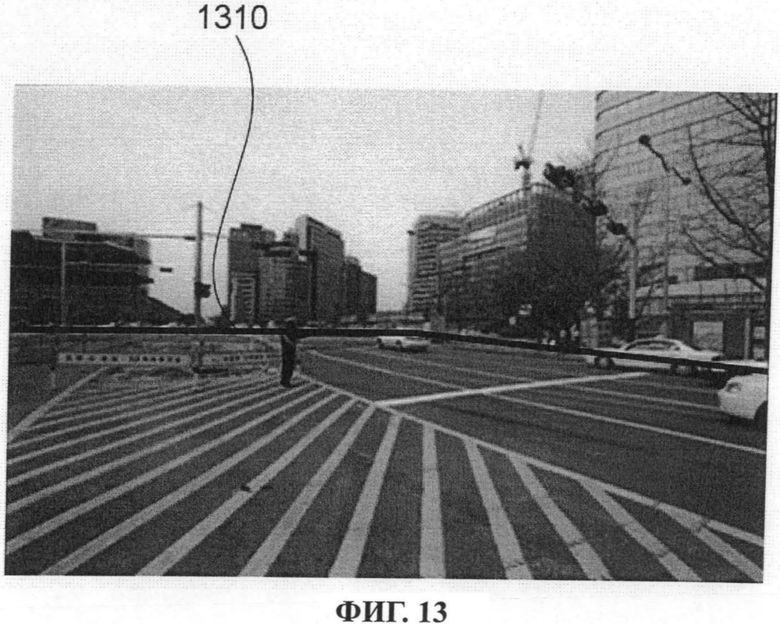
на фиг.13 представлен результат определения линии поверхности земли на основании изображения, представленного на фиг.10, согласно одному из примеров реализации настоящего изобретения.
Подробное раскрытие примеров реализации изобретения
Ниже приводится подробное описание примеров реализации настоящего изобретения с обращением к прилагаемым чертежам, на которых одинаковые цифровые обозначения позиций везде относятся к одинаковым элементам. Далее, чтобы объяснить настоящее изобретение, раскрываются примеры реализации со ссылками на прилагаемые чертежи.
На фиг.1 представлена блок-схема, иллюстрирующая способ определения линии поверхности земли на изображении согласно одному из примеров реализации настоящего изобретения.
На шаге 110 вводят изображение. В рассматриваемом примере реализации заявленного изобретения изображение представляет собой графический файл, состоящий из К3С (RGB) данные. Файл цветного изображения может иметь различные форматы: растровый (файл.bmp), формат Экспертной Группы по Фотографическим Изображениям -Joint Photographic Experts Group (файлы. jpeg,.jpg) или форматы необработанных снимков. Если файл имеет формат со сжатием данных, перед началом обработки изображения может быть выполнена декомпрессия этих данных.
Согласно другому примеру реализации изобретения точность и/или эффективность обработки изображения возрастает за счет различных видов предварительной обработки исходного изображения. Например, может быть скорректирована интенсивность (или яркость) или контрастность исходного изображения, при этом исходным изображением для дальнейшей обработки будет служить уже скорректированное таким образом изображение. Предварительная обработка также может включать в себя применение различных масок фильтров.
На шаге 120 для входного изображения создают карту “Земля-Строение-Небо” (ЗСН-карту). На ЗСН-карте представлена простая сегментация изображения на основные участки, а именно, на область поверхности земли, область строений и область неба. Для создания ЗСН-карты происходит обучение на материале множества изображений, где имеются вышеуказанные области, со считыванием цвета, местоположения, текстуры и т.п. После этого, когда вводится новое изображение, оно делится на эти области с учетом информации, полученной в результате обучения, что позволяет создать ЗСН-карту для нового изображения.
На шаге 130 выбирают совокупность горизонтальных прямых, принадлежащих области строений. Согласно одному из примеров реализации настоящего изобретения выбор прямых на исходном изображении происходит с применением детектора границ Собеля (Sobel Edge Detector). Из полученной таким образом совокупности прямых выбирают совокупность горизонтальных прямых, отфильтровывая при этом негоризонтальные прямые. После этого сравнивают ЗСН-карту для исходного изображения и совокупность горизонтальных прямых. Горизонтальные прямые, соответствующие области земли (З) и области неба (Н) ЗСН-карты, отфильтровывают и получают таким образом несколько горизонтальных прямых, принадлежащих области С.
На шаге 140 совокупность горизонтальных прямых, принадлежащих области С, подвергают кластеризации на несколько групп. Согласно одному из примеров реализации настоящего изобретения получают некоторую среднефазовую (middle-phase) группу на основании кластеризации по координатам оси X совокупности горизонтальных прямых, принадлежащих области С, выполненной с применением алгоритма сдвига среднего (mean-shift algorithm). Затем из каждой среднефазовой группы исключают «выбросы» (outliers) с применением алгоритма согласованности случайной выборки RANSAC (Random Sample Consensus). Для каждой среднефазовой группы вычисляют основное направление, после чего выполняют еще одну кластеризацию с использованием алгоритма сдвига среднего, формируя несколько более крупных групп посредством объединения среднефазовых групп, основные направления для которых сходны.
На шаге 150 для каждой из нескольких групп определяют точку схода. Для совокупности прямых, объединенных в несколько групп, определяют несколько точек схода. При этом также могут быть выбраны точки схода для тех “выбросов”, которые не были исключены из сформированных групп. Тогда точки схода для “выбросов” исключают, совокупность точек схода, удовлетворяющую рассматриваемой модели, усредняют и получают некоторое число окончательно определенных точек схода. Согласно одному из примеров реализации число окончательно определенных точек схода равно или меньше числу групп, поскольку, несмотря на то, что для каждой группы определяют одну точку схода, группы, состоящие из параллельных прямых, точки схода не имеют.
На шаге 160 определяют вертикальную граничную линию между группами. Согласно одному из примеров реализации, в каждой группе выделяют граничные области на уровне 10% от края, при этом самую длинную вертикальную прямую линию в пределах граничной области определяют как граничную линию между соседними группами. Вертикальная граничная линия соответствует точке, в которой линия поверхности земли изгибается.
На шаге 170 прямые, проходящие через несколько точек вертикальной граничной линии и точку схода для каждой из групп, определяют как линии-кандидаты поверхности земли. Линией-кандидатом поверхности земли считают всякую прямую, которая проходит через любой пиксель вертикальной граничной линии и точку схода для каждой из групп. В группе, где нет точки схода, линией-кандидатом поверхности земли считают прямую, параллельную горизонту.
На шаге 180 устанавливают некоторую полосу, центральная линия которой представляет собой границу между областью З и другими областями. Согласно одному из примеров реализации, установленная полоса представляет собой пиксели, полученные добавлением заданного числа пикселей к каждому пикселю вертикальной граничной линии вычитанием заданного числа пикселей от каждого пикселя вертикальной граничной линии по оси Y.
На шаге 190 определяют линию поверхности земли на изображении в зависимости от степени, в которой каждая из нескольких линий-кандидатов поверхности земли находится в пределах установленной полосы. Линии-кандидаты поверхности земли сравнивают с установленной полосой, и в качестве линии поверхности земли выбирают такую линию-кандидата, которая в наибольшей степени находится в пределах установленной полосы. Согласно одному из примеров реализации настоящего изобретения, для каждой линии-кандидата поверхности земли вычисляют количество пикселей, которые находятся в пределах установленной полосы, при этом линией поверхности земли изображения будет такая линия-кандидат, у которой наибольшее число пикселей лежит в пределах установленной полосы.
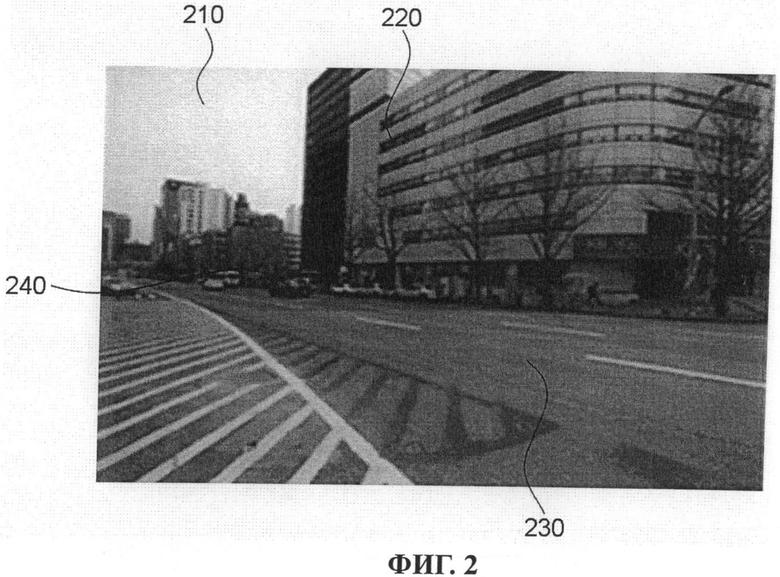
На фиг.2 показано исходное изображение согласно одному из примеров реализации настоящего изобретения. Область 210 соответствует области неба (Н), область 220 соответствует области строений (С), а область 230 соответствует области поверхности земли (З). Каждая из областей ограничена своими границами. Но на данном изображении на границе между областью С 220 и областью З 230 находится автомобиль 240. Автомобиль 240 и подобные элементы служат фактором, создающим погрешности при определении линии поверхности земли по ЗСН-карте путем простой сегментации изображения.
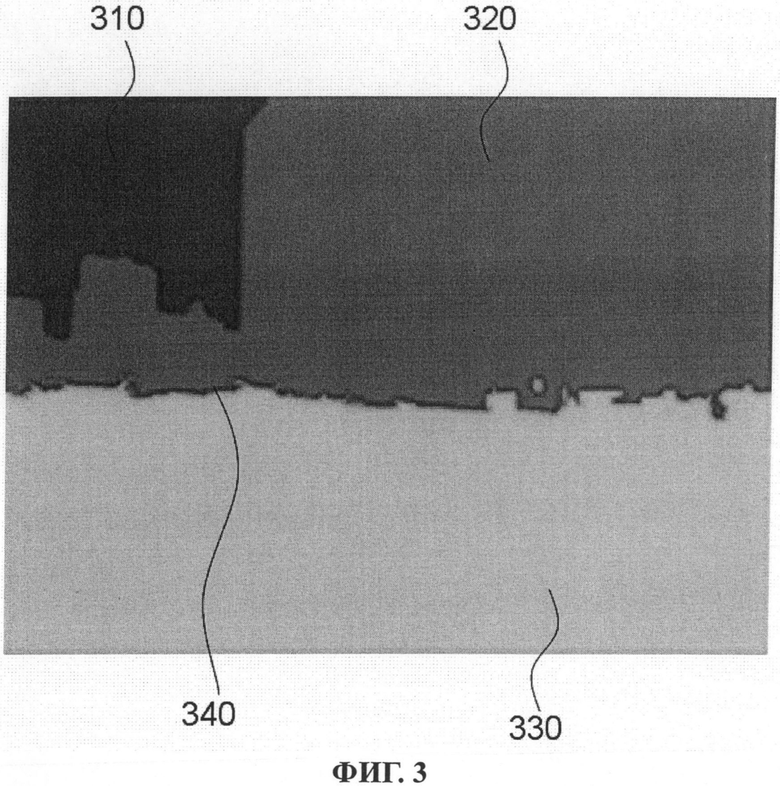
На фиг.3 представлена ЗСН-карта, выделенная на исходном изображении, представленном на фиг.2, согласно одному из примеров реализации настоящего изобретения. Область 310 соответствует области Н, область 320 - области С, а область 330 - области З. Граница 340 является границей между областью З и другими областями. В данном примере изображения граница 340 не является прямой линией. Согласно одному из примеров реализации, устанавливают некоторую полосу, центральной линией которой является линия 340, при этом линию поверхности земли исходного изображения определяют в зависимости от степени, в которой каждая из нескольких линий-кандидатов поверхности земли находится в пределах установленной полосы.
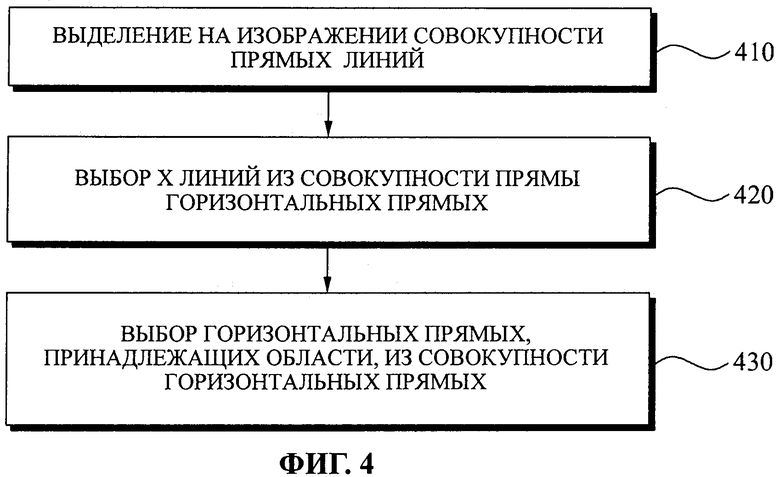
На фиг.4 представлена блок-схема, иллюстрирующая процесс выбора из совокупности горизонтальных прямых таких горизонтальных прямых, которые принадлежат области С согласно одному из примеров реализации настоящего изобретения.
На шаге 410 на исходном изображении выделяют совокупность прямых. Согласно одному из примеров реализации, выделение прямых происходит с использованием детектора границ Собеля (Sobel Edge Detector). Маски оператора для осей X и Y, используемые в детекторе границ Собеля, приведены в уравнении 1.
[Уравнение 1]
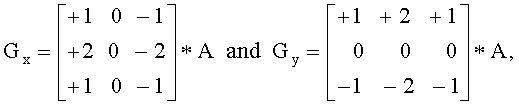
где Gx обозначает градиентный Х-оператор Собеля, a Gy - градиентный Y-оператор Собеля. Буквой А обозначены данные изображения. Матрица [1, 0, -1; 2, 0, -2; 1, 0, -1] соответствует маске для оси X, а матрица [1, 2, 1; 0, 0, 0; -1, -2, -1] - соответствует маске для оси Y.
На шаге 420 из полученной таким образом совокупности прямых выбирают совокупность горизонтальных прямых. На шаге 410 от выбранных прямых отфильтровывают негоризонтальные прямые и таким образом получают совокупность горизонтальных прямых.
Согласно другому примеру реализации настоящего изобретения, на шагах 410 и 420 к изображению применяют оператор Собеля для оси Y для создания градиентного изображения по методу Собеля и таким образом выделяют совокупность горизонтальных границ, а из горизонтальных границ выделяют совокупность прямых линий.
На шаге 430 из совокупности горизонтальных прямых выбирают совокупность горизонтальных прямых, принадлежащих области С. ЗСН-карту, изображенную на фиг.3, сравнивают с этими горизонтальными прямыми. От совокупности горизонтальных прямых отфильтровывают фрагменты, соответствующие области З и области С ЗСН-карты. Следовательно, остаются только фрагменты, соответствующие области С ЗСН-карты, и, таким образом, происходит выделение горизонтальных прямых, принадлежащих области С.
На фиг.5 показана совокупность горизонтальных прямых, выделенных на изображении, представленном на фиг.2, согласно одному из примеров реализации настоящего изобретения. Прямая 510 и прямая 520 являются горизонтальными прямыми, принадлежащими области С. Однако прямые 510 и 520 соответственно направлены к различным точкам схода. Хотя линия 530 является прямой, она принадлежит не области С, а дереву на краю улицы, согласно изображению на фиг.2. Прямая 540 и прямая 550 являются прямыми, выделенными на проезжей части улицы. При обработке изображения с целью определения линии поверхности земли прямые 530, 540 и 550 могут создавать погрешность.
На фиг.6 показана совокупность горизонтальных прямых, принадлежащих области С, выделенных на изображении, представленном на фиг.5, согласно одному из примеров реализации настоящего изобретения. ЗСН-карта, представленная на фиг.3, и изображение, представленное на фиг.5, сравниваются на шаге 430 (см. фиг.4). Из изображения на фиг.5 отфильтровывают фрагменты, соответствующие областям 310 и 330 на фиг.3. Таким образом, как показано на фиг.6, остается только часть, соответствующая области 320. При этом из прямых 510-550 на фиг.5 исключаются прямые 540 и 550, соответствующие областям 310 и 330, и остаются только прямые 510, 520 и 530, показанные на фиг.6 как прямые 610, 620 и 630.
На фиг.7 представлена блок-схема, иллюстрирующая процесс кластеризации совокупности горизонтальных прямых, принадлежащих области С на фиг.6, на несколько групп согласно одному из примеров реализации настоящего изобретения.
На шаге 710 формируют среднефазовые группы, выполняя кластеризацию координат по оси X совокупности прямых, принадлежащих области С, с использованием алгоритма сдвига среднего АСС (mean-shift algorithm, MSA). Метод АСС (MSA) позволяет обнаруживать градиент в вероятностном распределении значений признака с помощью итеративной процедуры и представляет собой статистически эффективное средство поиска пиков (или мод).
На шаге 720 из каждой среднефазовой группы исключают “выбросы”. Согласно одному из примеров реализации, “выбросы” исключают с применением алгоритма согласованности случайной выборки RANSAC.
На шаге 730 для каждой средней фазы вычисляют основное направление. Для вычисления основного направления средней фазы к совокупности прямых в каждой группе применяют векторное исчисление.
На шаге 740 объединяют среднефазовые группы, у которых основные направления сходны, формируя из них несколько групп. Если выполнить следующую кластеризацию посредством алгоритма АСС (MSA), используя основные направления, полученные на шаге 730, то будет получено несколько более крупных групп за счет объединения тех среднефазовых групп, основные направления которых сходны.
На фиг.8 показано несколько групп, полученных кластеризацией изображения на фиг.6, согласно одному из примеров реализации настоящего изобретения. Кластер 810, кластер 820, кластер 821, кластер 822, кластер 823, кластер 824, кластер 831 и кластер 832 представляют собой группы горизонтальных прямых, имеющих одинаковые точки схода. Согласно одному из примеров реализации настоящего изобретения, несколько кластеров, основные направления которых сходны, могут быть объединены в один кластер. Поскольку в кластерах 821-824 основные направления сходны между собой, их можно объединить в кластер 820. Подобным образом кластеры 831 и 832 могут быть объединены в кластер 830. Таким образом, на рассматриваемом изображении оказываются выделенными такие группы, как кластер 810, кластер 820 и кластер 830.
На фиг.9А показаны точки схода для каждой из нескольких групп, изображенных на фиг.8, согласно одному из примеров реализации настоящего изобретения. Изображение 910 иллюстрирует процесс получения точки схода. Для совокупности прямых кластера 820 на фиг.8 выбраны точки схода 914, 915 и 916. Также для совокупности прямых кластера 830 выбраны точки схода 917, 918 и 919. Точки схода 912 и 913 являются точками схода «выбросов», не исключенных из кластера. Эти точки схода 912 и 913 для «выбросов» исключают. При окончательном определении точки схода используют точки схода линий, удовлетворяющих данной модели. Кроме того, у кластера 810 на фиг.8, объединяющего параллельные прямые, точка схода отсутствует.
На фиг.9В показаны окончательно определенные точки схода для каждой из нескольких групп, изображенных на фиг.8, согласно одному из примеров реализации настоящего изобретения. Представленные на фиг.9А точки схода 912 и 913 для “выбросов” исключены. Точку схода 922 находят путем усреднения точек схода 914, 915 и 916, представленных на фиг.9А. Точку схода 923 определяют как среднее для точек схода 917, 918 и 919. Таким образом, окончательно определенными точками схода для рассматриваемого изображения являются точки схода 922 и 923.
На фиг.10А изображены выделенные границы нескольких групп для определения вертикальной граничной линии между этими группами согласно одному из примеров реализации настоящего изобретения. На изображении показаны кластеры 1011 и 1012. Поскольку прямые линии в кластере 1011 параллельны между собой, то точка схода не определяется. Совокупность прямых в кластере 1012 образует единственную точку схода слева от этого кластера 1012.
На изображении 1010 выделяют граничные области на уровне 10% от края каждого кластера. Прямая 1013 и прямая 1014 представляют собой прямые, отстоящие, соответственно, на 10% от левого края и на 10% от правого края кластера 1011. Подобным образом, прямая 1015 и прямая 1016 представляют собой прямые, отстоящие, соответственно, на 10% от левого края и на 10% от правого края кластера 1012. В других примерах реализации 10% можно заменить другим значением.
На фиг.10В показана область между кластерами 1011 и 1012, выбранная для определения вертикальной граничной линии между несколькими группами согласно одному из примеров реализации настоящего изобретения. На изображении 1020 выбрана область 1021 между кластерами 1014 и 1015, показанными на фиг.10А. Каждый из кластеров 1011 и 1012 содержит линию поверхности земли и участок с искривлением линии поверхности земли где-то в области 1021.
На фиг.10С проиллюстрирован пример результата определения вертикальной граничной линии между несколькими группами согласно одному из примеров реализации настоящего изобретения.
На изображении 1030 граничная линия 1031 соответствует вертикальной граничной линии между несколькими группами, определенной на шаге 160 на фиг.1. Согласно одному из примеров реализации, граничная линия 1031 является самой длинной из вертикальных прямых в области 1021 на фиг.10В.
На фиг.11 показано несколько линий-кандидатов поверхности земли для изображения на фиг.10, определенных на шаге 170 фиг.1 согласно одному из примеров реализации настоящего изобретения. Граничная линия 1110 соответствует граничной линии 1031 на фиг.10. В качестве линии-кандидата поверхности земли определяют линию 1131, проходящую через точку 1111 на граничной линии 1110 и кластеры 1011 и 1012 на фиг.10. Поскольку для кластера 1011 точка схода не определена, линия-кандидат поверхности земли 1131 слева от точки 1111 горизонтальна, а справа от точки 1111 направлена к точке схода 1120 для кластера 1012. Аналогично линии-кандидаты поверхности земли 1132, 1133, 1134 и 1135 определяются относительно точек 1112, 1113, 1114 и 1115 граничной линии 1110.
Фиг.12 иллюстрирует установление полосы, центральная линия которой представляет собой границу между областью З и другими областями согласно одному из примеров реализации настоящего изобретения. Такой полосой является установленная полоса 1210, центральная линия которой представляет собой границу 340 на фиг.3. Согласно одному из примеров реализации заявленного изобретения установленная полоса 1210 содержит пиксели, полученные в результате добавления заданного числа пикселей к каждому пикселю границы 340 или вычитания заданного числа пикселей от каждого пикселя границы 340 по оси Y.
На фиг.13 показан результат определения линии поверхности земли изображения, представленного на фиг.10, согласно одному из примеров реализации настоящего изобретения. Линия поверхности земли 1310 - это линия на примере изображения, представленном на фиг.10. Линии-кандидаты поверхности земли (1131-1135 и т.п.), представленные на фиг.11, сравнивают с установленной полосой на фиг.12, и за линию поверхности земли 1310 принимают ту из линий-кандидатов поверхности земли (11 Sill 35 и т.п.), которая в наибольшей степени принадлежит установленной полосе 1210. Согласно одному из примеров реализации изобретения линию поверхности земли 1310 на изображении определяют по степени перекрытия установленной полосы 1210 каждой из нескольких линий-кандидатов поверхности земли (1131-1135 и т.п.), для чего для каждой линии-кандидата поверхности земли (1131-1135 и т.п.) вычисляют число пикселей, находящихся в пределах установленной полосы 1210, и выбирают в качестве линии поверхности земли 1310 для данного изображения ту линию-кандидата поверхности земли, у которой в пределах установленной полосы находится наибольшее число пикселей.
Способ обработки изображений согласно описанным выше примерам реализаций настоящего изобретения может быть записан на машиночитаемых носителях, в том числе в виде программируемых команд, обеспечивающих выполнение на компьютере различных действий. Такие носители могут также включать в себя, исключительно или в сочетании с программируемыми командами, файлы данных, структуры данных и т.п. К примерам машиночитаемых носителей относятся: магнитные носители, например жесткие диски, дискеты и магнитные ленты; оптические носители, например, диски CD-ROM и DVD; магнитооптические носители, например, флоптические диски; аппаратные устройства, специально сконфигурированные для хранения и выполнения программируемых команд, например постоянные запоминающие устройства (ROM), запоминающие устройства с произвольной выборкой (RAM), устройства флэш-памяти и т.п. К примерам программируемых команд относятся как машинный код, например, создаваемый компилятором, так и файлы, содержащие высокоуровневый код, который может быть выполнен на компьютере с помощью интерпретатора. Указанные аппаратные устройства могут быть сконфигурированы таким образом, чтобы работать как один или более программных модулей, выполняя шаги вышеуказанных примеров реализации настоящего изобретения.
Хотя было представлено и раскрыто несколько примеров реализации настоящего изобретения, данное изобретение не ограничивается раскрытыми примерами. Напротив, специалистам в данной области техники должно быть очевидно, что в указанные примеры реализации могут быть внесены изменения, которые не выходят за рамки принципов и духа данного изобретения, а содержание последнего определяется пунктами формулы изобретения и их эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2470368C2 |
| Способ обеспечения компьютерного зрения | 2022 |
|
RU2791587C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УТОЧНЕНИЯ ПОЗЫ КАМЕРЫ С УЧЕТОМ ПЛАНА ПОМЕЩЕНИЯ | 2022 |
|
RU2794441C1 |
| Способ и электронное устройство для обнаружения трехмерных объектов с помощью нейронных сетей | 2021 |
|
RU2776814C1 |
| СПОСОБ ИНТЕРАКТИВНОЙ СЕГМЕНТАЦИИ ОБЪЕКТА НА ИЗОБРАЖЕНИИ И ЭЛЕКТРОННОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2742701C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| СПОСОБ ОЦЕНКИ ГЛУБИНЫ СЦЕНЫ ПО ИЗОБРАЖЕНИЮ И ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2020 |
|
RU2761768C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| Автоматизированный способ люминесцентного контроля детали | 2022 |
|
RU2787314C1 |
Изобретение относится к способу обработки изображений, в частности, к определению линии поверхности земли, т.е. граничной линии на изображении между областью строения и областью поверхности земли. Техническим результатом является повышение эффективности обработки изображений. Способ заключается в выборе на изображении нескольких линий-кандидатов поверхности земли, установки полосы, центральная линия которой является границей между поверхностью земли (З) и другими областями на карте изображения «Земля-Строение-Небо» (ЗСН-карте), и определении линии поверхности земли изображения, выбирая такую линию-кандидата поверхности земли, которая в наибольшей степени находится в пределах установленной полосы, либо в выделении на изображении несколько прямых линий, определении нескольких линий-кандидатов поверхности земли с использованием точки схода указанных прямых линий, и с применением ЗСН-карты изображения при выборе из совокупности линий поверхности земли линии поверхности земли для данного изображения. 3 н. и 14 з.п. ф-лы, 16 ил.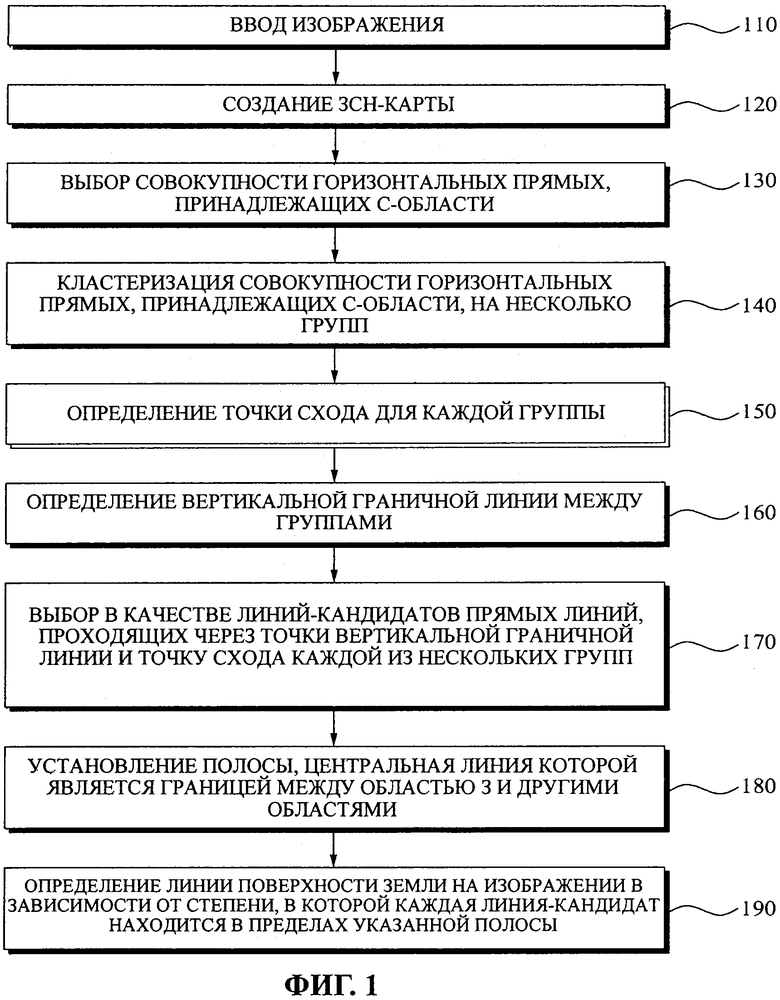
1. Способ определения линии поверхности земли на изображении, содержащий следующие действия:
выбирают на изображении несколько линий-кандидатов поверхности земли;
устанавливают полосу, центральная линия которой является границей между областью поверхности земли (З) и другими областями на карте изображения "Земля-Строение-Небо" (ЗСН-карте); и
определяют линию поверхности земли данного изображения, выбирая такую линию-кандидата поверхности земли, которая в наибольшей степени находится в пределах установленной полосы.
2. Способ по п.1, дополнительно содержащий следующие действия: на основании изображения создают ЗСН-карту данного изображения.
3. Способ по п.1, дополнительно содержащий следующие действия:
выявляют совокупность горизонтальных прямых, принадлежащих области строений (С) изображения,
причем определение нескольких линий-кандидатов поверхности земли содержит следующие действия:
определяют несколько линий-кандидатов поверхности земли с использованием указанной совокупности горизонтальных прямых.
4. Способ по п.3, отличающийся тем, что указанное выявление содержит следующие действия:
выделяют на изображении совокупность прямых линий,
в указанной совокупности прямых линий выявляют совокупность горизонтальных прямых; и
в указанной совокупности горизонтальных прямых выявляют совокупность горизонтальных прямых, принадлежащих области С.
5. Способ по п.4, отличающийся тем, что выявление совокупности горизонтальных прямых, принадлежащих области С, содержит следующие действия:
сравнивают область С на ЗСН-карте изображения с совокупностью горизонтальных прямых и определяют совокупность горизонтальных прямых, принадлежащих области С.
6. Способ по п.3, дополнительно содержащий следующие действия:
выполняют кластеризацию совокупности горизонтальных прямых на несколько групп,
причем определение нескольких линий-кандидатов поверхности земли дополнительно содержит следующие действия:
определяют на изображении несколько линий-кандидатов поверхности земли на основании кластеризации совокупности горизонтальных прямых.
7. Способ по п.6, отличающийся тем, что указанная кластеризация содержит следующие действия:
выполняют кластеризацию совокупности горизонтальных прямых на несколько среднефазовых групп по координате Х с использованием алгоритма сдвига среднего;
из каждой среднефазовой группы исключают «выбросы»;
вычисляют основное направление для каждой среднефазовой группы; и
формируют несколько групп путем объединения тех среднефазовых групп, у которых основные направления сходны.
8. Способ по п.6, дополнительно содержащий следующие действия:
определяют точку схода для каждой из нескольких групп.
9. Способ по п.8, дополнительно содержащий следующие действия:
определяют вертикальную граничную линию между указанными группами.
10. Способ по п.9, в котором определение нескольких линий-кандидатов поверхности земли дополнительно содержит следующие действия:
выявляют прямые, проходящие через несколько точек вертикальной граничной линии и точку схода для каждой из нескольких групп.
11. Способ по п.1, в котором указанное определение некоторой полосы содержит следующие действия:
устанавливают некоторую полосу, имеющую по оси Y заданную ширину относительно пикселя границы между З-областью и другими областями на ЗСН-карте.
12. Способ по п.1, отличающийся тем, что определение линии поверхности земли изображения содержит следующие действия:
для каждой линии из нескольких линий-кандидатов поверхности земли вычисляют число пикселей, которые находятся в пределах указанной установленной полосы; и
определяют такую линию-кандидата поверхности земли, у которой в пределах указанной установленной полосы находится наибольшее число пикселей.
13. Способ определения линии поверхности земли, содержащий следующие действия:
выделяют на изображении несколько прямых линий;
определяют несколько линий-кандидатов поверхности земли с использованием точки схода указанных прямых линий; и
с применением ЗСН-карты изображения из совокупности линий поверхности земли выбирают линию поверхности земли для данного изображения.
14. Способ по п.13, в котором определение линии поверхности земли изображения содержит следующие действия:
устанавливают некоторую полосу, центральная линия которой является границей между областью З и другими областями на ЗСН-карте изображения; и
определяют линию поверхности земли данного изображения в зависимости от степени, в которой каждая линия-кандидат поверхности земли находится в пределах указанной определенной полосы.
15. Способ по п.14, дополнительно содержащий следующие действия: выполняют кластеризацию совокупности прямых на несколько групп, причем определение нескольких линий-кандидатов поверхности земли содержит следующие действия:
определяют на изображении несколько линий-кандидатов поверхности земли на основании выполненной кластеризации совокупности прямых.
16. Способ по п.15, дополнительно содержащий следующие действия: определяют точку схода для каждой из нескольких групп прямых; и определяют вертикальную граничную линию между указанными несколькими группами,
причем определение нескольких линий-кандидатов поверхности земли дополнительно содержит следующие действия:
находят прямые, которые проходят через совокупность точек вертикальной граничной линии и точку схода каждой из нескольких групп.
17. Машиночитаемое запоминающее устройство, в котором хранится программа для реализации способа по любому из пп.1-16.
| ГРАДИЕНТНЫЙ СПОСОБ ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА МАТРИЦЕ ПОЛУТОНОВОГО РАСТРОВОГО ИЗОБРАЖЕНИЯ | 2007 |
|
RU2325044C1 |
| СОЗДАНИЕ ПОСЛЕДОВАТЕЛЬНОСТИ СТЕРЕОСКОПИЧЕСКИХ ИЗОБРАЖЕНИЙ ИЗ ПОСЛЕДОВАТЕЛЬНОСТИ ДВУМЕРНЫХ ИЗОБРАЖЕНИЙ | 2001 |
|
RU2287858C2 |
| US 20070098290 A1, 03.05.2007 | |||
| US 20060233461 A1, 19.10.2006 | |||
| WEI ZHANG et al., "Hierarchical Building Recognition", Departament of Computer Science, George Mason University, 08.02.2006. | |||

