Изобретение относится к области измерений, а более конкретно к определению эталонных параметров для получения истинной скорости судна в период натурных испытаний.
Известные способы и технические средства получения истинной скорости, описанные в [1-4], включают измерение длины пробега, как кратчайшего расстояния между двумя обсервавованными местами (обсервациями) судна и времени прохождения этого расстояния, по которым графически или аналитически рассчитывается скорость, сравнение полученного значения истинной скорости с показаниями штатного судового измерителя скорости (лага), расчет погрешности определения истинной скорости.
Известные способы определения истинной скорости отягощены субъективными ошибками операторов, выполняющих наблюдения и расчеты, требуют соблюдения ряда специфических требований, выполнение которых, как правило, приводит к увеличению периода испытаний. Кроме того, известные способы весьма трудоемки и требуют значительных материальных затрат.
Из известных способов определения истинной скорости судна наиболее близким, по технической сути, к заявляемому решению является способ и устройство, описанные в [4, с.220-222]. Данный способ включает излучение ведущей станцией, установленной на судне сигнала в режиме непрерывного излучения, прием этого сигнала ведомой станцией, установленной на берегу, ретрансляцию принятого сигнала судовой станцией, измерение доплеровского сдвига частоты этого излучения, определение истинной скорости судна по измеренному доплеровскому сдвигу частот, сравнение полученных значений истинной скорости со значениями, полученными по показаниям штатного лага, определение поправки лага.
Недостатками известного способа являются необходимость осуществления маневрирования судном на береговую станцию и от нее, а также усреднение информации для получения приемлемой точности, что требует набора необходимого набора статистических данных. Кроме того, способ осуществляется только в зоне действия береговой станции.
Задачей предлагаемого технического решения является расширение функциональных возможностей с одновременным повышением точности определения истинной скорости судна при проведении натурных испытаний.
Поставленная задача достигается тем, что в способе определения истинной скорости судна, включающем прием сигналов от внешних средств коррекции судовой станцией, измерение доплеровского сдвига частоты, определение истинной скорости по измеренному доплеровскому сдвигу частот, сравнение полученных значений истинной скорости со значениями, полученными по показаниям судового лага, определение поправки лага, в котором прием сигналов судовой станцией осуществляют при движении судна по прямому назначению в диапазоне рабочих частот 1570-1620 МГц при частоте опорного сигнала 311 МГц с последующим преобразованием принятых сигналов в полосу частот 15-65 МГц со сверткой сигнала псевдослучайной последовательности кодом конкретного навигационного аппарата, преобразование сигнала получастот и получение второй промежуточной частоты 420 КГц, сигнал которой содержит информацию об эфемеридах и информацию о доплеровском сдвиге частоты, измерение которого производят на частоте 3,36 МГц, определение поправки лага выполняют посредством электронной картографической навигационной системы, а в устройство определения истинной скорости судна, содержащее антенный блок, соединенный с приемоиндикатором, введены блок сопряжения с лагом и курсоуказателем, и электронная картографическая система, при этом блок сопряжения с лагом и курсоуказателем своими входами-выходами соединен с входами-выходами приемоиндикатора, лага, курсоуказателя и электронной картографической системы соответственно.
В предлагаемом способе прием сигналов судовой станцией в диапазоне рабочих частот 1570-1620 МГц при частоте опорного сигнала 311 МГц с последующим преобразованием принятых сигналов в полосу частот 15-65 МГц со сверткой сигнала псевдослучайной последовательности кодом конкретного навигационного космического аппарата, с преобразованием сигнала получастот и получение второй промежуточной частоты 420 КГц, сигнал которой содержит информацию об эфемеридах и информацию о доплеровском сдвиге частоты, измерение которого производится на частоте 3,36 МГц, что повышает точность отсчетов измерения доплеровского сдвига частоты.
При использовании предлагаемого способа определения истинной скорости судна исключается необходимость выполнения маневрирования судном на береговую станцию и от нее, что позволяет реализовать его при плавании судна по прямому назначению.
Совокупность новых признаков предлагаемого способа определения истинной скорости при проведении натурных испытаний лагов из известных источников не выявлена, что позволяет сделать вывод о соответствии заявляемого предложения условию патентоспособности "изобретательский уровень".
Способ осуществляется следующим образом.
При плавании судна по прямому назначению в любой точке Мирового океана:
- принимают антенной сигнал навигационного космического аппарата в диапазоне частот 1570-1620 МГц, усиливают и преобразуют в сигнал промежуточной частоты в полосе 15-65 МГц при опорном сигнале, равном 311 МГц;
- посредством приемоиндикатора преобразуют принятые сигналы в полосу частот 15-65 МГц со сверткой сигнала псевдослучайной последовательности кодом конкретного навигационного космического аппарата;
- преобразуют сигналы получастот и получают вторую промежуточную частоту 420 КГц, сигнал которой содержит информацию об эфемеридах и информацию о доплеровском сдвиге частоты;
- измеряют величину доплеровского сдвига частоты на частоте 3,36 МГц;
- определяют значение истинной скорости;
- сравнивают значение истинной скорости со значением скорости, полученной по лагу.
Сравнение значений истинной скорости со значением скорости, полученной по лагу выполняют путем трансляции значений обеих скоростей на электронную картографическую навигационную систему для индикации этих значений на электронной навигационной карте. С помощью электронного маркера определяют разность между показаниями. По полученной разности формируют величину поправки и вводят ее в схему коррекции судового лага.
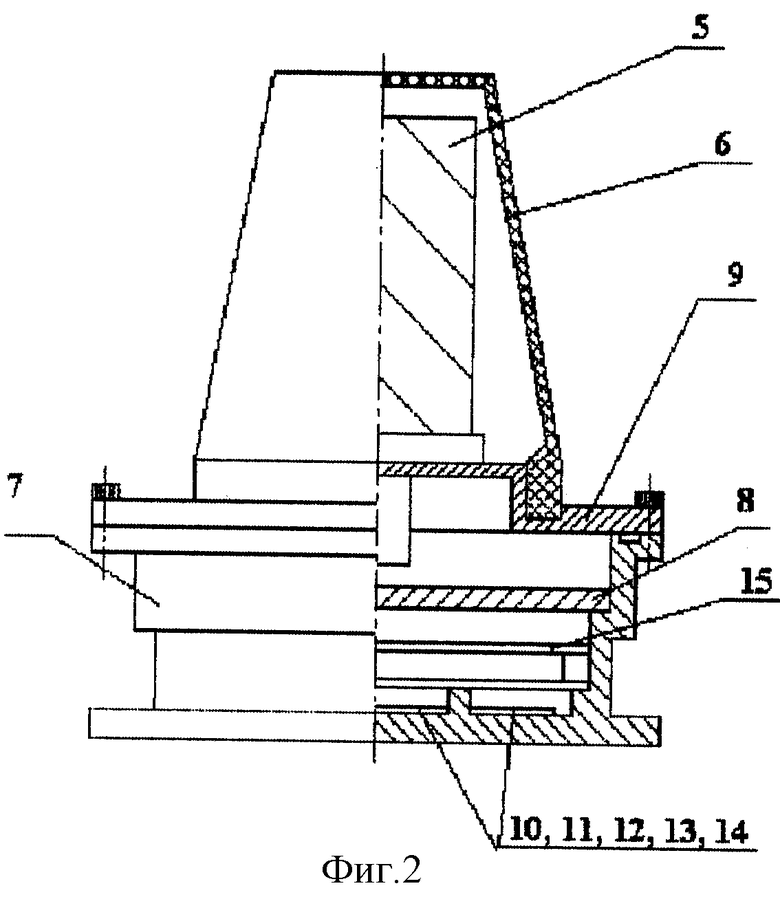
На чертеже (фиг.1) приведена блок-схема устройтва, посредством которого реализуется способ.
Устройство содержит антенный блок 1, соединенный с приемоиндикатором 2, который через блок сопряжения 3 соединен с судовым лагом и курсоуказателем, и электронную картографическую навигационную систему 4.
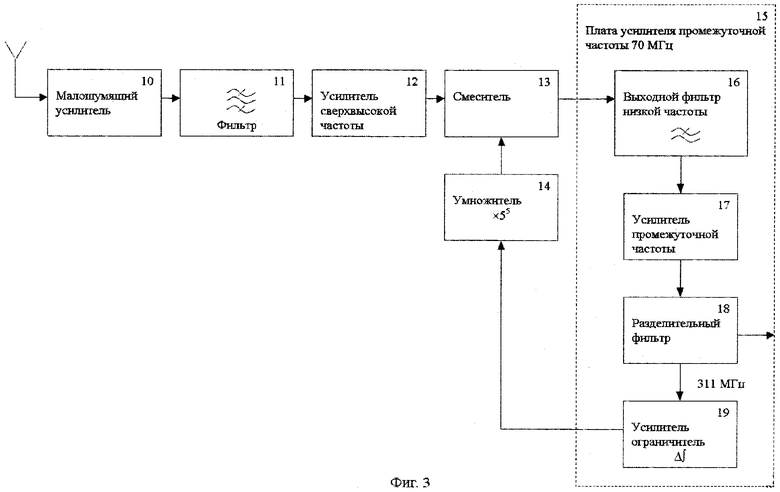
Антенный блок 1 (фиг.2) содержит квадрифилярную антенну 5, диэлектрический кожух 6, корпус блока сверхвысокой частоты 7, крышку блока, сверхвысокой частоты 8, крышку антенного блока 9.
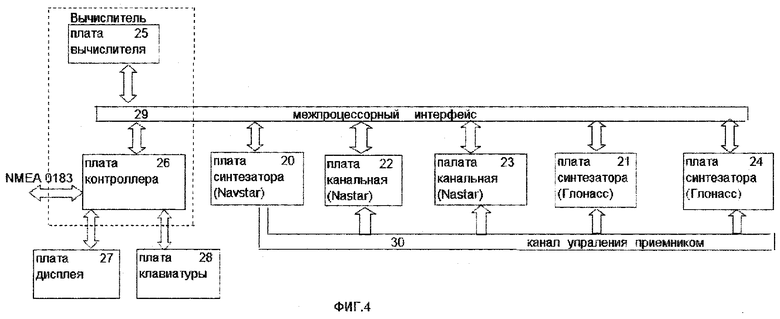
Антенна 5 установлена на верхней крышке антенного блока 9. Платы блока сверхвысокой частоты установлены внутри корпуса блока сверхвысокой частоты, который содержит (фиг.3) малошумящий усилитель 10, фильтр 11, усилитель сверхвысокой частоты 12, смеситель 13, умножитель 14 и плату усиления промежуточной частоты 15, состоящую из входного фильтра низкой частоты 16, усилителя промежуточной частоты 17, разделительного фильтра 18 и усилителя-ограничителя 19.
Малошумящий усилитель 10 выполнен двухкаскадным на транзисторах 2Т313А-2, каждый каскад которого обеспечивает усиление сигнала в диапазоне частот 1570-1620 МГц до 10 дб.
Фильтр 11 выполнен в микрополосковом исполнении и состоит из пяти резисторов. Для подстройки амплитудно-частотных характеристик предусмотрены две подстроечные пластины из поликора толщиной 1 мм, положение которых подбирается при регулировке фильтра.
Усилитель сверхвысокой частоты 12 выполнен по балансной схеме на четырех транзисторах 2Т313А1-2. Общее усиление УСВЧ составляет 20 дб в диапазоне 1570-1620 МГц.
Смеситель 13 выполнен на базе СВЧ микросборки М43209 и обеспечивает преобразование сигналов в диапазоне частот 1570-1620 МГц в сигналы промежуточной частоты в диапзоне 15-65 МГц при частоте гетеродина 1555 МГц, поступающей с платы умножителя 14, который выполнен на четырех транзисторах 2Т3132А-2. Первый и второй транзисторы обеспечивают усиление и ограничение сигнала 311 МГц. Третий транзистор работает в режиме генератора гармоник, обеспечивая получение гармоник частоты 311 МГц. Четвертый транзистор работает в режиме отсечки тока и усиливает все гармоники, полученные на третьем транзисторе. Выделение пятой гармоники с частотой 1555 МГц обеспечивает трехрезонаторный микрополосковый фильтр, расположенный на этой же плате, что и транзисторы.
Входной фильтр низкой частоты 16 выполнен на трех конденсаторах и двух катушках индуктивности и имеет частоту среза 70 МГц. Усилитель промежуточной частоты 17 выполнен трехкаскадным на шести транзисторах по двухконтактной схеме. Усилитель-ограничитель 18 выполнен на транзисторе, а разделительный фильтр 19 выполнен на катушке индуктивности, конденсаторе и резисторе.
Антенный блок 1 работает следующим образом. Сигнал навигационного космического аппарата в полосе частот 1570-1620 МГц, принятый антенной, через выходной разьем антенны поступает на вход блока сверхвысокой частоты на малошумящий усилитель 10, который обеспечивает усиление сигнала до 20 дб при коэффициенте шума не более 4 дб. Усиленный сигнал подается на вход фильтра 11, который имеет полосу пропускания 1570-1620 МГц при затухании в полосе пропускания не более 20 дб.
Параметрами фильтра 11 определяются амплитудно-частотные характеристики высокочастотного тракта. С выхода фильтра 11 сигнал подается на вход усилителя сверхвысокой частоты 12, который обеспечивает усиление сигнала до 20 дб. С выхода блока 12 сигнал поступает на смеситель 13, где происходит его преобразование в полосу частот 15-65 МГц. На вход гетеродина смесителя 13 поступает частота 1553 МГц с выхода умножителя 14. В режиме преобразования смеситель 13 имеет коэффициент передачи минус 9 дб.
С выхода смесителя 13 сигнал поступает на плату усилителя прмежуточной частоты 15, где происходит фильтрация и усиление сигнала на 35 дб. Для развязки по питанию, опорной частоте и сигналу на плате 15 установлен разделительный фильтр 18, который обеспечивает выделение опорной частоты 311 МГц, которая затем передается на усилитель-ограничитель 19, который переходит в режим ограничения при входном уровне гетеродина на входе блока сверхвысокой частоты более 250 мВ и обеспечивает нормальную работу антенного блока 1 при коротком фидере между антенным блоком 1 и приемоиндикатором 2.
С выхода усилителя 19 платы усилителя промежуточной частоты 15, частота 311 МГц поступает на умножитель частоты 14, который производит усиление частоты 311 МГц до необходимого уровня, ограничивает его и выделяет пятую гармонику, равную 1555 МГц.
Приемоиндикатор 2 (фиг.4) состоит из двух плат синтезаторов 20, 21, трех плат канальных 22, 23 и 24, платы вычислителя 25, платы контроллера 26, платы дисплея 27, платы клавиатуры 28, межпроцессорного интерфейса 29, канала управления приемником 30.
Платы синтезаторов 20 и 21 предназначены для формирования опорных гетеродинных частот высокой стабильности, усиления сигнала промежуточной частоты, формирования отсчетов псевдодальностей, формирования шины управления платами канальными, слежение за сигналом, изменяющимся в пределах доплеровских сдвигов частот от 5,0 до минус 5,0 КГц, обработки информации сигнала навигационного космического аппарата на протяжении всего интервала слежения, формирования метки системного времени.
Платы канальные 22, 23-24 предназначены для свертки сигнала, поступающего с синтезатора, псевдослучайной последовательности конкретного навигационного космического аппарата, преобразования сигнала и получение второй промежуточной частоты 420 КГц, содержащей информацию о доплеровском сдвиге, усиления этой частоты, оцифровки значения доплеровского сдвига частоты, выделения эфемерической информации и выработки сигналов для получения псевдодальностей.
Плата вычислителя 25 предназначена для приема, хранения и преобразования информации, поступающей с плат синтезаторов 20, 21 и плат канальных 22, 23 и 24, а также решения задачи определения координат места, счисления и скорости.
Плата контроллера 26 предназначена для управления индикатором и работой клавиатуры, для обмена информацией этих устройств с процессором, для формирования последовательного канала по NMEA 0183, а также для ведения календаря.
Плата дисплея 27 предназначена для визуальной индикации буквенно-цифровой информации, поступающей с платы вычислителя 25 через плату контроллера 26.
Плата клавиатуры 28 предназначена для связи приемоиндикатора 2 с оператором.
Блок сопряжения 3 предназначен для приема и обработки информации, поступающей от судовых датчиков курса (курсоуказателя) и скорости (лага), выдачи этой информации по каналу NMEA 0183 на приемоиндикатор 2 и электронную картографическую навигационную систему 4, прием информации от электронной картографической навигационной системы и трансляции ее на датчики лага и курсоуказателя.
Электрическая связь с датчиками лага и курсоуказателя осуществляется через вращающиеся трансформаторы типа ВТ-5 и сельсины. Блок также содержит анолого-цифровой преобразователь и сетевой адаптер.
Электронная картографическая навигационная система 4 содержит порты ввода-вывода, представляющих собой два ассинхронных последовательных порта RS-323, электронную картографическую систему типа ECS-1000 с программным обеспечением d Kart-Navigator и мировой коллекцией морских электронных карт в формате СМ-93.
В целом устройство работает следующим образом.
После запуска аппаратуры в приемоиндикатор вводят исходные данные (широта, долгота, высота антенны над уровнем моря, скорость от лага и курс от курсоуказателя) и выполняют программу поиска навигационного космического аппарата, при этом, если в оперативно-запоминающем устройстве приемоиндикатора 2 есть сохраненный альманах о навигационном космическом аппарате, то поиск и наведение производится только на навигационный космический аппарат, находящийся в зоне видимости. При отсутствии альманаха процессор приемоиндикатора 2 через платы синтезаторов записывает в каждый канал канальных плат номера навигационных космических аппаратов системы "NAVSTAR", а также цифровой код литерной частоты навигационных космических аппаратов системы "Глонасс" и разрешает поиск навигационного космического аппарата по дальности. Принятый антенной сигнал навигационного космического аппарата в диапазоне частот 1570-1620 МГц усиливается и преобразуется в сигнал промежуточной частоты в полосе 15-65 МГц. Сигнал промежуточной частоты с антенного блока 1 поступает на плату синтезатора системы "NAVSTAR" и подается на платы канальные и плату синтезатора системы "Глонасс". С платы синтезатора системы "NAVSTAR" в антенный усилитель подается сигнал первой гетеродинной частоты 311 МГц для получения промежуточной частоты. В канальных платах, в каждом канале, происходит свертка сигнала псевдослучайной последовательностью кодом конкретного навигационного космического аппарата, преобразование сигнала промежуточной частоты 420 КГц. Сигнал этой частоты содержит информацию об эфемеридах, а также информацию о доплеровском сдвиге частоты. Для повышения точности отсчетов измерение доплеровского сдвига частоты производится на частоте 3,36 МГц, а эфемиридная информация преобразуется в шестиразрядный код и по каналу межпроцессорного интерфейса передается на плату вычислителя вместе со значением доплеровской частоты. Кроме того, в процессор передаются признаки наличия навигационного космического аппарата на данном канале и признак его захвата, а также информация о рассогласовании шкал времени между бортовым временем навигационного космического аппарата и системным временем приемоиндикатора 2.
Вся информация с канальной платы системы "Глонасс" поступает в процессор с прерыванием, с частотой 20 Гц (500 мс), а с канальной платы системы "NAVSTAR" с частотой 10 Гц (100 мс), которые являются метками времени и используются для ведения счета времени. Частоты 10 и 20 Гц являются высокостабильными и вырабатываются на плате синтезатора частоты системы "Глонасс", путем деления опорной частоты 1 КГц.
Кроме того, с каждого канала на плату синтезатора системы "NAVSTAR" поступает тактовая частота псевдослучайной последовательности кода и сигнал начала кодовой последовательности - "эпоха" кода.
Находящийся на плата синтезатора системы "NAVSTAR" дальномер раз в секунду подключается к каждому каналу и по информации, по тактовой частоте кода и "эпохе" кода производит измерение псевдослучайной дальности до навигационного космического аппарата. Выдача информации в процессор производится по прерываниям с частотой 10 Гц.
Информация, поступающая с плат синтезаторов и канальных плат, накапливается в оперативно запоминающем устройстве, находящемся на плате вычислителя. Дальнейшая обработка информации осуществляется под управлением программ, производящих расчет навигационной задачи при получении информации о текущих координатах, скорости и путевом угле. Результаты решения навигационной задачи и значения скорости по лагу, по каналу межпроцессорного интерфейса, с процессора через плату контроллера поступают на последовательный порт электронной картографической навигационной системы 4, а которой она выводится на морскую навигационную электронную карту, соответствующую району плавания. Посредством электронного маркера определяют разность между показаниями судового лага и показаниями спутниковой навигационной системы и полученную поправку по скорости через блок 3 транслируют на корректирующее устройство лага.
В предлагаемом способе, прием сигналов судовой спутниковой навигационной станцией выполняют при движении судна по прямому назначению, с последующей их обработкой в определенном порядке, с использованием информации от космических навигационных аппаратов и штатных судовых средств навигации, посредством устройства, скомплексированного из штатных судовых средств, что позволяет сделать вывод о соответствии заявляемого предложения условию патентоспособности "промышленная применимость".
Преимуществом заявляемого способа и устройства для его осуществления, в сравнении с известными объектами, является повышение точности, за счет исключения субъективных ошибок, снижение трудоемкости выполнения тарировочных работ при натурных испытаниях лагов, так как тарировочные работы выполняются только с использованием штатных судовых средств, без использования информации от береговых навигационных средств, что исключает необходимость выполнения сложного маневрирования судном и позволяет реализовать способ при плавании судна по прямому назначению. Предлагаемый способ может быть также использован при проведении испытаний по определению маневренных элементов судов и других подвижных объектов.
Источники информации
1. Авербах Н.В., Баранов Ю.К. Определение маневренных элементов морского судна и поправки лага. М., Транспорт, 1970.
2. Попеко Г.П., Соломатин Е.Н. Навигация, - в кн. Курс кораблевождения, т.1. Л., УГС ВМФ, 1961.
3. Фатьянов А.И. Практическое руководство по выверке и определению поправок штурманских приборов на судах. М., Транспорт, 1976.
4. Судовые измерители скорости (Справочник) / Хребтов А.А., Кошкарев В.Н., Осюхин Б.А., Виноградов К.А., Чернявец В.В. // Л., Судостроение, 1978, с.206-222.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ ОПЕРАТИВНОГО ИССЛЕДОВАНИЯ АТМОСФЕРЫ, ЗЕМНОЙ ПОВЕРХНОСТИ И ОКЕАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2254600C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2489721C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПО ИЗМЕРЕНИЯМ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2550299C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2334996C2 |
Изобретение относится к области измерений, а более конкретно к определению эталонных параметров для получения истинной скорости судна в период натурных испытаний. Способ определения истинной скорости судна включает прием сигналов от внешних средств коррекции судовой станцией, измерение доплеровского сдвига частоты, определение истинной скорости по измеренному доплеровскому сдвигу частоты, сравнение полученных значений истинной скорости со значениями, полученными по показаниям судового лага, определение поправки лага. Прием сигналов судовой станцией осуществляют при движении судна по прямому назначению, в диапазоне рабочих частот 1570-1620 МГц, при частоте опорного сигнала 311 МГц, с преобразованием принятых сигналов в полосу частот 15-65 МГц, со сверткой сигнала псевдослучайной последовательности кодом конкретного навигационного космического аппарата, после которой получают вторую промежуточную частоту 420 КГц, сигнал которой содержит информацию об эфемеридах и информацию о доплеровском сдвиге частоты, измерение которого производится на частоте 3,36 МГц. Определение поправки лага выполняют посредством электронной картографической навигационной системы, а устройство определения истинной скорости содержит антенный блок, соединенный с приемоиндикатором, блок сопряжения с лагом и курсоуказателем и электронную картографическую систему, при этом блок сопряжения с лагом и курсоуказателем своими входами-выходами соединен с входами-выходами приемоиндикатора, лага, курсоуказателя и электронной картографической системы соответственно. Техническим результатом является повышение точности определения истинной скорости судна при проведении натурных испытаний. 2 н.п. ф-лы, 4 ил.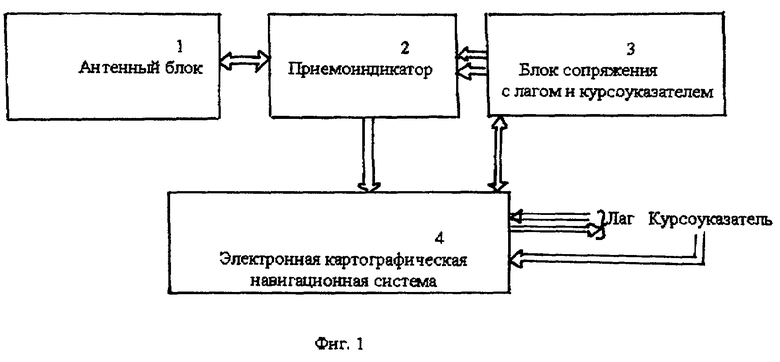
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| ВОЛОСОВ П.С | |||
| и др | |||
| Судовые комплексы спутниковой навигации, Л., Судостроение, 1983, с.249-255 | |||
| ХРЕБТОВ А.А | |||
| и др | |||
| Судовые измерители скорости (Справочник), Л., Судостроение, 1978, с.206-222 | |||
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 1994 |
|
RU2080620C1 |
| Штамп для горячего деформирования | 1973 |
|
SU462648A1 |

