Изобретение относится к области обнаружения в пространстве и определения местоположения объектов в воздушной среде и воде при помощи визуально-оптического контроля лазерного сканирования, которое осуществляется с помощью активного телеметрического наблюдения за траекторией распространения лазерного луча. Объектами лазерной локации могут стать гражданские или военные объекты (танки, корабли, ракеты) и сооружения.
Существует достаточное количество способов и устройств обнаружения объектов с помощью лазерной локации, к которой относят наземные лазерные дальномеры, наземные локаторы, бортовые лазерные системы, лазерные системы разведки, или голографические индикаторы на лобовом стекле. Кроме этого на данный момент времени сложились основные направления, по которым идет внедрение лазерной техники в военное дело. Этими направлениями являются лазерная локация (наземная, бортовая, подводная), лазерная связь, лазерные навигационные системы, лазерное оружие, лазерные системы ПРО и ПКО.
Известны различные типы лазерной локации. Это первый лазерный дальномер ХМ-23 прошел испытание во Вьетнаме и был принят на вооружение в армии США, норвежский лазерный дальномер LP-4, дальномер США AN/WS-1 для танка М60А, американский локатор типа "ОПДАР" для слежения за ракетами на активном участке их полета. Локатор для слежения имеет три устройства по углам: точный и грубый датчики по углам и инфракрасную следящую систему.
В работах [1, 2] изложены общая теория лазерной локации и принципы построения лазерных локационных средств, предназначенных для решения широкого круга практических задач. Рассмотрены вопросы оптимального приема лазерных локационных сигналов, измерения параметров. Проанализированы методы обработки траекторных измерений, различные способы получения некоординатной информации, включая топографическую, интерферометрическую и адаптивную.
Известно устройство (аналог) - трехмерный лазерный сканер в 3D [3]. По характеру получаемой информации работа этого прибора схожа с работой тахеометра. Так же, как и последний, сканер с помощью лазерного дальномера измеряет расстояние до объекта, меряет горизонтальный и вертикальный угол, получая, таким образом, XYZ-координату. Разница в том, что лазерный сканер проводит тысячи, десятки и даже сотни тысяч измерений в секунду. Дневная съемка сканером - это десятки, сотни миллионов измерений. «Сырой» результат работы сканера - так называемое облако точек. Для каждой точки записываются три координаты и численная характеристика интенсивности отраженного сигнала, которая определяется характером поверхности, на которую попадает лазерный луч. Раскрашенное по интенсивности облако точек после сканирования напоминает цифровую трехмерную фотографию. Большинство современных лазерных сканеров также имеют встроенную видео/фотокамеру, поэтому облако точек также может быть раскрашено в реальные цвета.
Кроме этого известны работы, представленные в Интернете по неземному и воздушному сканированию объектов в атмосфере на сайте "Технологии ТЭК" [3, 4].
В самом общем виде схема работы с лазерным сканером выглядит следующим образом. Прибор устанавливается на штатив напротив снимаемого объекта. Оператор задает область сканирования и необходимое разрешение (плотность облака точек) и запускает процесс съемки. Для получения полной информации об объекте обычно приходится сканировать его с нескольких позиций (станций). Далее следует обработка «сырых» данных и оформление результатов измерений, полученных со сканера, в том виде, который требуется изначально. Трехмерные модели, плоские планы, профили и сечения, вычисления объемов и площадей поверхностей можно получить в качестве конечного результата.
Недостатками данного устройства является не достаточно точное определение объекта по причине воздушных турбулентных потоков, создаваемых двигателями самолетов или ракет.
Наиболее близким по техническому решению, принятому за прототип, является способ обнаружения объектов и определения их местоположения и устройство для его осуществления [5]. В способе обнаружения объектов и определения их местоположения пространство, в котором находится разыскиваемый объект, подсвечивается двумя пучками импульсного лазерного излучения, каждый из которых непрерывно частотно модулирован по одной из пространственных координат, при этом координаты, по которым производится модулирование, взаимно ортогональны и лежат в плоскости, перпендикулярной направлению распространения излучения, а пучки импульсного лазерного излучения совмещены в пространстве. Устройство, реализующее способ, включает в себя два источника фазомодулированного лазерного излучения, две дифракционные решетки, две рассеивающие цилиндрические линзы, оптическую приемную систему, спектроанализатор, вычислительное устройство.
Недостатком прототипа является то, что при лазерном сканировании информация о перемещающихся объектах искажается по причине возникновения турбулентных потоков, создаваемых двигателями ракет или самолетов.
Задачей изобретения является уменьшение искажений в пространственном анализе атмосферы. При этом технический-результат изобретения заключается в повышении вероятности обнаружения объектов и повышении точности измерения пространственных координат.
Для реализации способа предложено устройство для визуально-оптического контроля лазерного сканирования атмосферы в трехмерном пространстве с помощью телеметрической системы наблюдения, позволяющее осуществлять одновременно сканирование объектов в воздухе и наблюдать за отклонениями лазерного луча в воздухе турбулентными потоками ракеты или самолета с целью их обнаружения.
Технический результат заключается в повышении вероятности обнаружения объектов, особенно малоразмерных, в подсвечиваемом секторе пространства, при сокращении времени их обнаружения и повышении точности измерения пространственных координат. Предлагаемое изобретение позволяет уменьшить искажения в пространственном анализе атмосферы
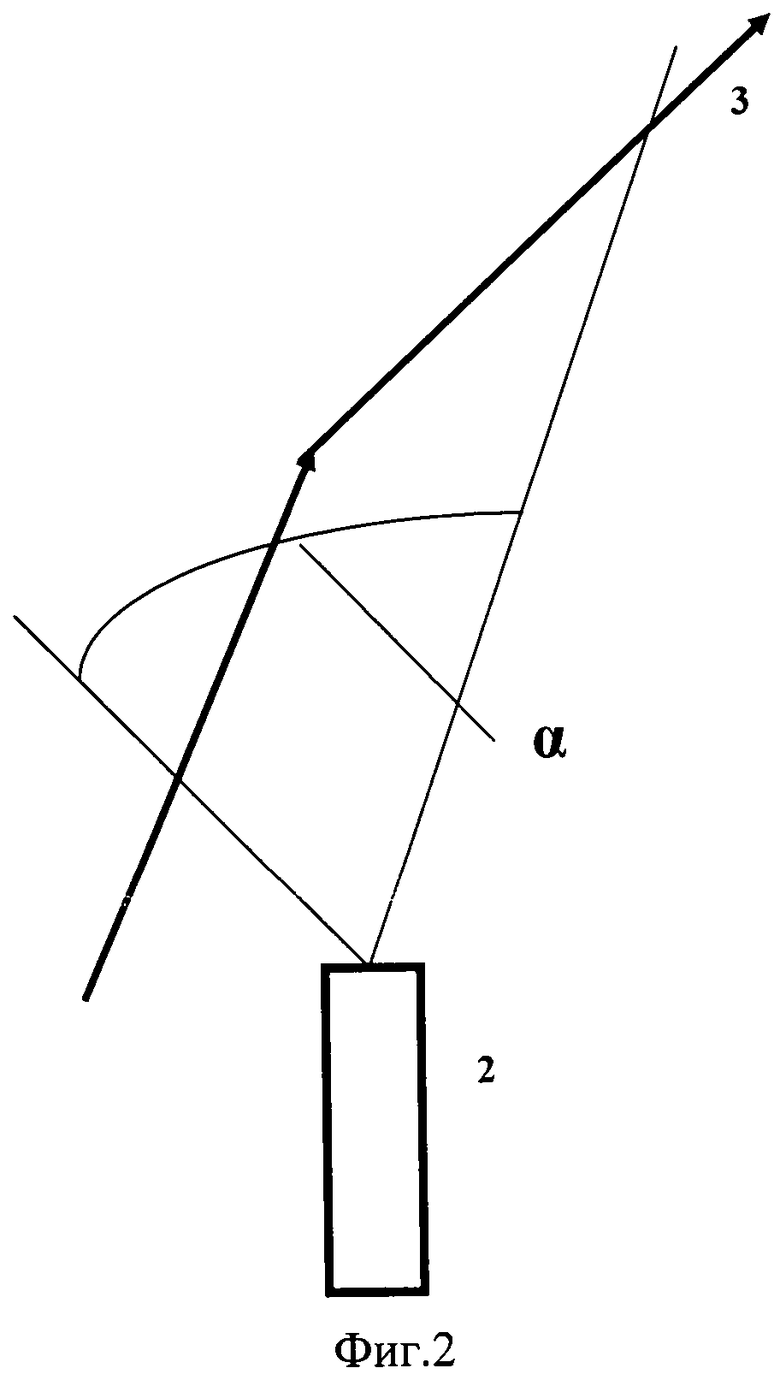
Для пояснения предполагаемого изобретения на фиг.1 (вид "сверху") и фиг.2 (вид "сбоку") изображен общий вид локационной системы.
На фиг.1 представлена схема визуально-оптического контроля на виде "сверху". Устройство состоит из сканирующего управляемого лазера 1, позволяющего отслеживать положение и отклонения лазерного луча 3 при попадании на объект 4 или след летящего объекта 5.
На фиг.2 представлена схема визуально-оптического контроля на виде "сбоку". На данной схеме представлено телеметрическое устройство 2 с углом обзора а, позволяющее отслеживать положение и отклонение лазерного луча 3 при попадании на летящий объект 4 или след 5 летящего объекта.
Способ визуально-оптического контроля лазерного сканирования атмосферы осуществляется следующим образом. С помощью управляемого сканирующего лазера 1 осуществляется сканирование атмосферы в 3-мерном пространстве. След 5 летящего объекта (турбулентный поток), вызываемый летательным средством или объектом 4, отклоняет в пространстве луч 3 когерентного источника света на угол а при выбросе топлива в атмосферу. Отклонение лазерного источника света контролируется телеметрическим устройством 2.
Таким образом, предлагаемое изобретение позволяет осуществлять контроль объектов в 3-мерном пространстве, выделяя только ракеты или самолеты, создающие турбулентные потоки за счет сгорания топлива.
Таким образом, предлагаемое изобретение позволяет осуществлять контроль объектов в 3-мерном пространстве, выделяя только ракеты или самолеты, создающие турбулентные потоки за счет сгорания топлива.
ИСТОЧНИКИ ИНФОРМАЦИИ:
1. Лазерная локация, (под ред: Устинова Н.Д.),. - М Машиностроение, 1984 г. 272 с.
2. Медведев Е.М., Данилин И.М., Мельников С.Р. Лазерная локация Земли и леса: Учебное пособие. Второе издание, переработанное и дополненное. Красноярск: Институт леса им. В.Н. Сукачева СО РАН, 2006. 230 с.
3. http://www.oilcapital.ru/edition/technik/archives/technik/technik_04_20 07/113048/public/l 13072.shtml.
4. http://www.geokosmos.rn/about/technologies/laser/.
5. Патент на изобретение «Способ обнаружения объектов и определения их местоположения и устройство для его осуществления». RU №2224267, МПК G01S 17/06, G01S 17/88, G01S 17/00, 2003 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ УТЕЧЕК МЕТАНА В ПРОМЫШЛЕННЫХ ГАЗОПРОВОДАХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1995 |
|
RU2108597C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| Система импульсной лазерной локации | 2017 |
|
RU2660390C1 |
| Система импульсной лазерной локации | 2015 |
|
RU2612874C1 |
| СПОСОБ И ЛИДАРНАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТЕЙ АТМОСФЕРЫ, ОСУЩЕСТВЛЯЕМОГО НА БОРТУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, А ТАКЖЕ В АЭРОПОРТАХ И НА ВЕТРОВЫХ ЭЛЕКТРОСТАНЦИЯХ | 2006 |
|
RU2405172C2 |
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖУЩИХСЯ ОБЪЕКТОВ МЕТОДОМ ПАССИВНОЙ ЛОКАЦИИ | 2014 |
|
RU2575471C2 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕЙ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ ПО ПРИЗНАКАМ "СЛЕДА В АТМОСФЕРЕ" ЛЕТЯЩЕГО В СТРАТОСФЕРЕ С ГИПЕРЗВУКОВОЙ СКОРОСТЬЮ "РАДИОНЕЗАМЕТНОГО" ОБЪЕКТА | 2017 |
|
RU2689783C2 |
Способ включает подсветку атмосферы лазерным излучением, прием отраженного излучения и использование вычислительной системы. Сканирование атмосферы в 3-мерном пространстве осуществляют с помощью управляемого сканирующего лазера. Летательные объекты или турбулентные потоки, вызываемые летательными объектами, отклоняют в пространстве луч когерентного источника света при тепловых турбулентных потоках с выбросом топлива в атмосферу. Отклонение луча лазерного источника света контролируют телеметрическим устройством. Технический результат - повышение вероятности обнаружения объектов и повышение точности измерения пространственных координат. 2 ил.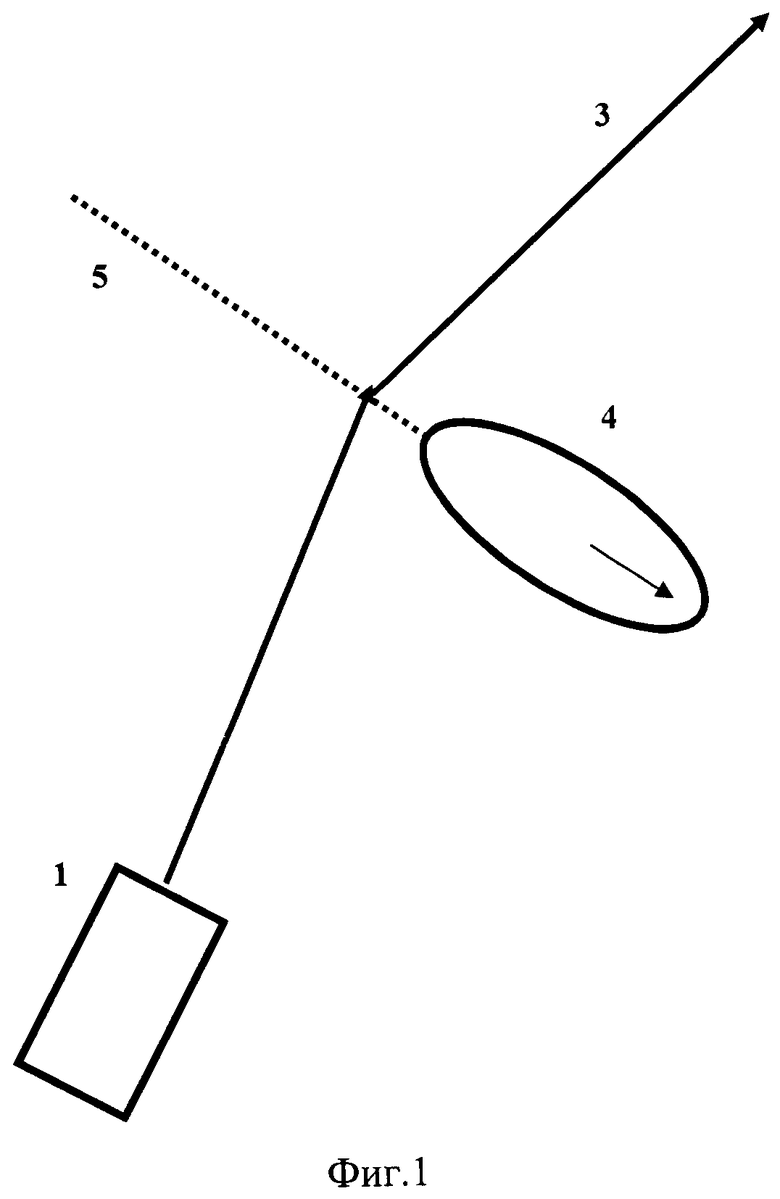
Способ визуально-оптического контроля лазерного сканирования атмосферы, включающий подсветку атмосферы лазерным излучением, прием отраженного излучения, использование вычислительной системы, отличающийся тем, что сканирование атмосферы в 3-мерном пространстве осуществляют с помощью управляемого сканирующего лазера, при этом летательные объекты или турбулентные потоки, вызываемые летательными объектами, отклоняют в пространстве луч когерентного источника света при тепловых турбулентных потоках с выбросом топлива в атмосферу, а отклонение луча лазерного источника света контролируют телеметрическим устройством.
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2224267C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ТУРБУЛЕНТНОСТИ ВОЗДУХА ВОКРУГ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2365523C2 |
| СИСТЕМА НА ОСНОВЕ ЛИДАРА С КОМПЬЮТЕРНЫМ УПРАВЛЕНИЕМ ДЛЯ ИДЕНТИФИКАЦИИ ДЫМА, В ЧАСТНОСТИ ДЛЯ ВЫЯВЛЕНИЯ ЛЕСНОГО ПОЖАРА НА РАННЕЙ СТАДИИ | 2002 |
|
RU2293998C2 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1980 |
|
SU944437A1 |

