Область техники
Изобретение относится к приспособлению для регулирования аэродинамического устройства моторного транспортного средства. Изобретение также относится к системе, содержащей аэродинамическое устройство и приспособление для его регулирования. В заключение, данная заявка относится к моторному транспортному средству (далее называемому для краткости автомобилем) с регулируемым таким образом аэродинамическим устройством.
Уровень техники
Аэродинамические устройства для автомобилей служат для улучшения устойчивости автомобиля на дороге и его аэродинамических свойств, в особенности, на больших скоростях. В связи с этим желательно приспособить положение аэродинамического устройства под определенные требования и условия.
Раскрытие изобретения
Таким образом, задачей данного изобретения является создание приспособления для лучшего регулирования аэродинамического устройства.
Эта задача решена при помощи признаков по пунктам формулы 1, 14 и 15. Суть данного изобретения заключается в комбинировании в регулировочном приспособлении устройств линейного регулирования для регулирования выдвижения аэродинамического устройства по высоте и устройства регулирования угла для регулирования угла атаки (т.е. наклона) аэродинамического устройства. Последнее регулировочное устройство для краткости далее называется также позиционирующим устройством, т.е. устройством, обеспечивающим позиционирование (в данном случае угол наклона) аэродинамического устройства.
Эти регулировочные устройства предпочтительно приводятся в действие независимо друг от друга. Таким образом, угол атаки аэродинамического устройства можно регулировать независимо от высоты его выдвижения.
Возможность бесступенчатой фиксации в различных промежуточных положениях улучшает гибкость регулировочного приспособления. Таким образом, расположение аэродинамического устройства можно оптимально приспосабливать к различным требованиям и условиям.
Выполнение регулировочных устройств со шпиндельным приводом является в высшей степени надежным и, кроме того, обеспечивает точную и надежную регулировку аэродинамического устройства.
Встроенная конструкция улучшает аэродинамику и зрительное восприятие регулировочного приспособления.
Расположенный по центру блок привода обеспечивает синхронное регулирование расположенных по бокам устройств линейного регулирования.
Двойная опора шпинделя устройства регулирования улучшает его надежность и точность.
Кинематическая связь (называемая далее также кинематическим механизмом) позволяет осуществить простое преобразование линейного перемещения в поворотное перемещение. В связи с этим, многоузловой кинематический механизм и/или эксцентрик являются/является особенно предпочтительными.
Краткий перечень чертежей
Дальнейшие преимущества данного изобретения, а также его признаки и детали проявляются в описании нескольких примерных вариантов осуществления со ссылкой на графические материалы, в которых:
Фиг.1 показывает схематический частичный вид аэродинамического устройства с регулировочным приспособлением согласно первому примерному варианту осуществления,
Фиг.2 показывает вид в разрезе по линии II-II примерного варианта осуществления согласно фиг.1,
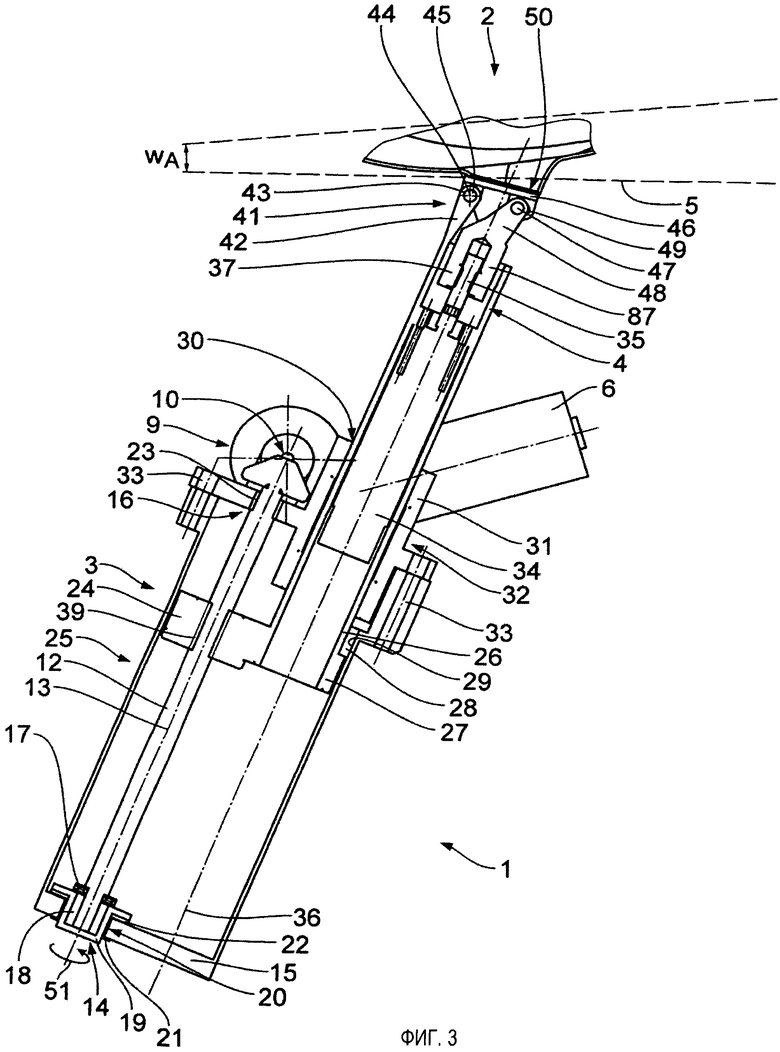
Фиг.3 показывает изображение согласно фиг.2 с выдвинутым аэродинамическим устройством,
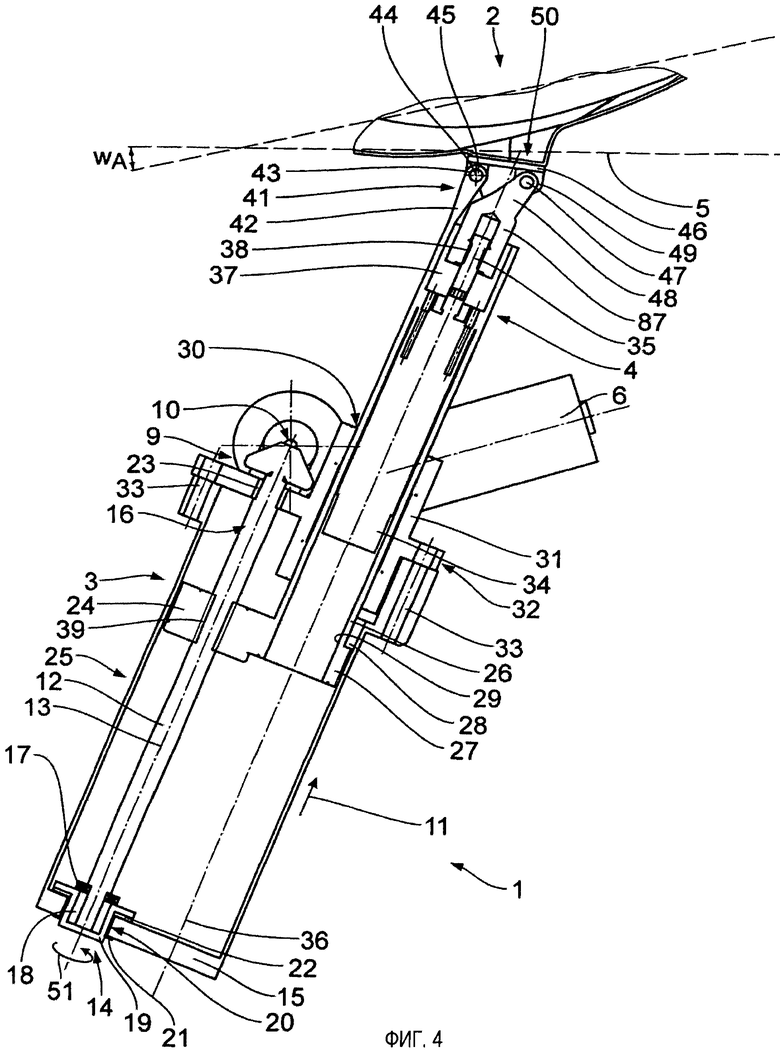
Фиг.4 показывает изображение согласно фиг.3 с повернутым аэродинамическим устройством,
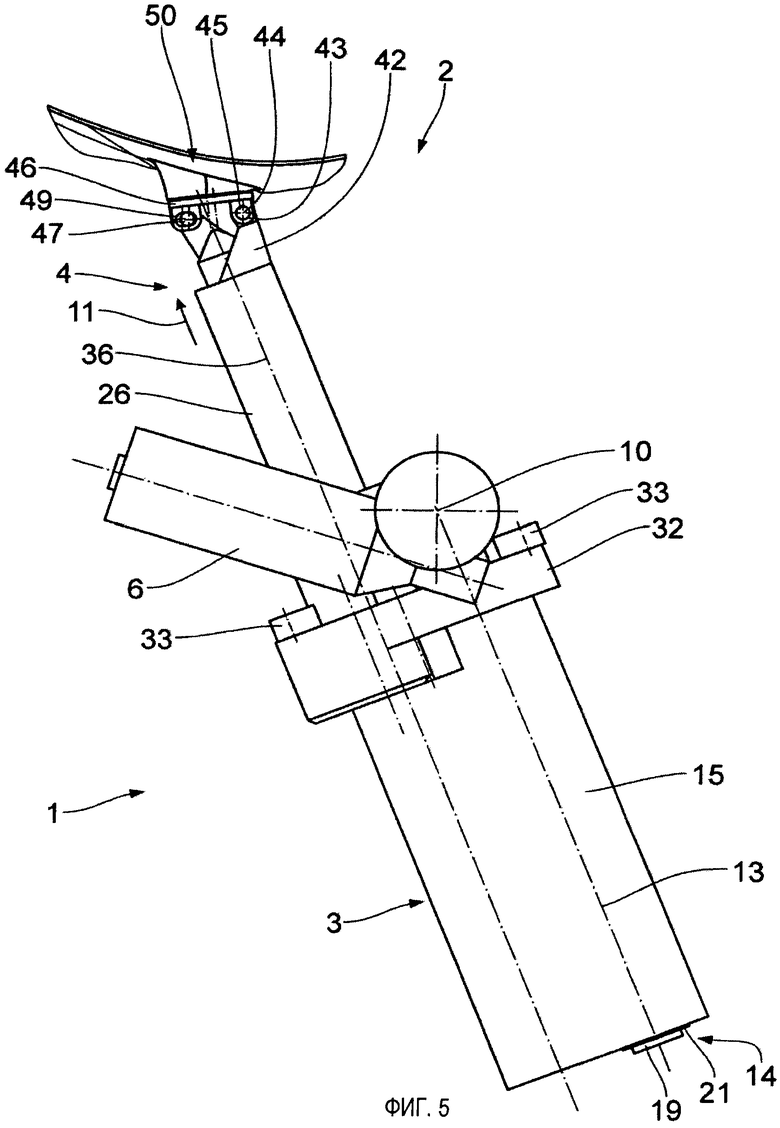
Фиг.5 показывает вид сбоку примерного варианта осуществления согласно фиг.1,
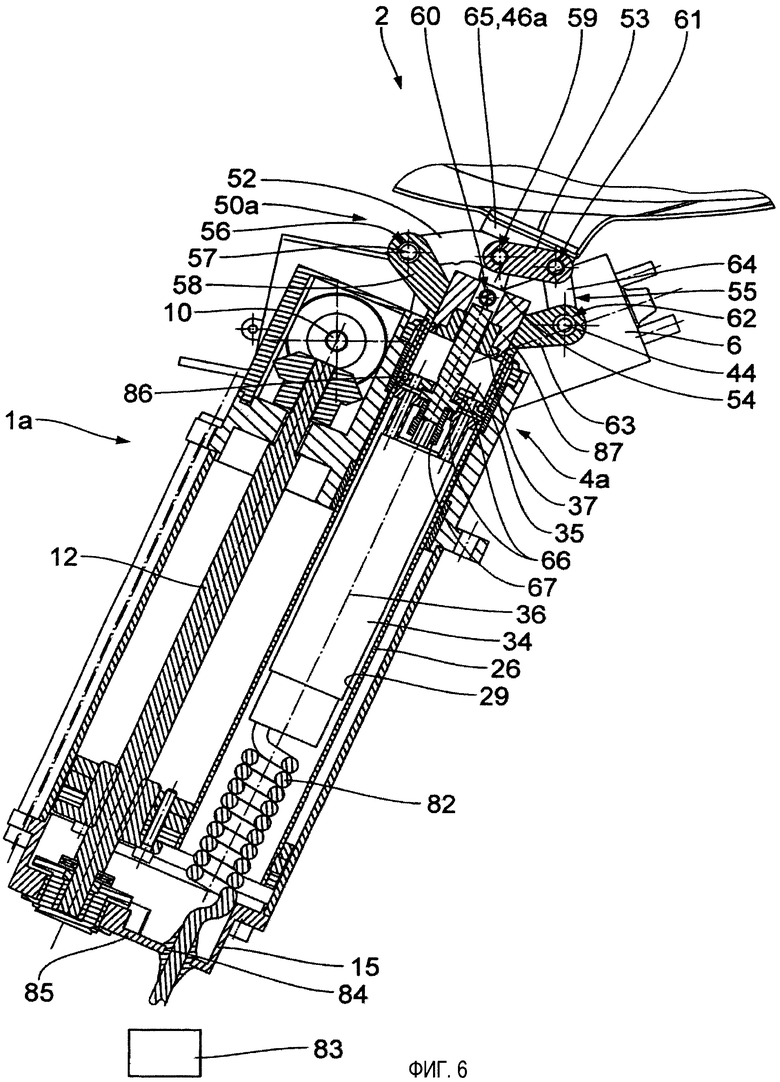
Фиг.6 показывает изображение согласно фиг.2 второго примерного варианта осуществления данного изобретения,
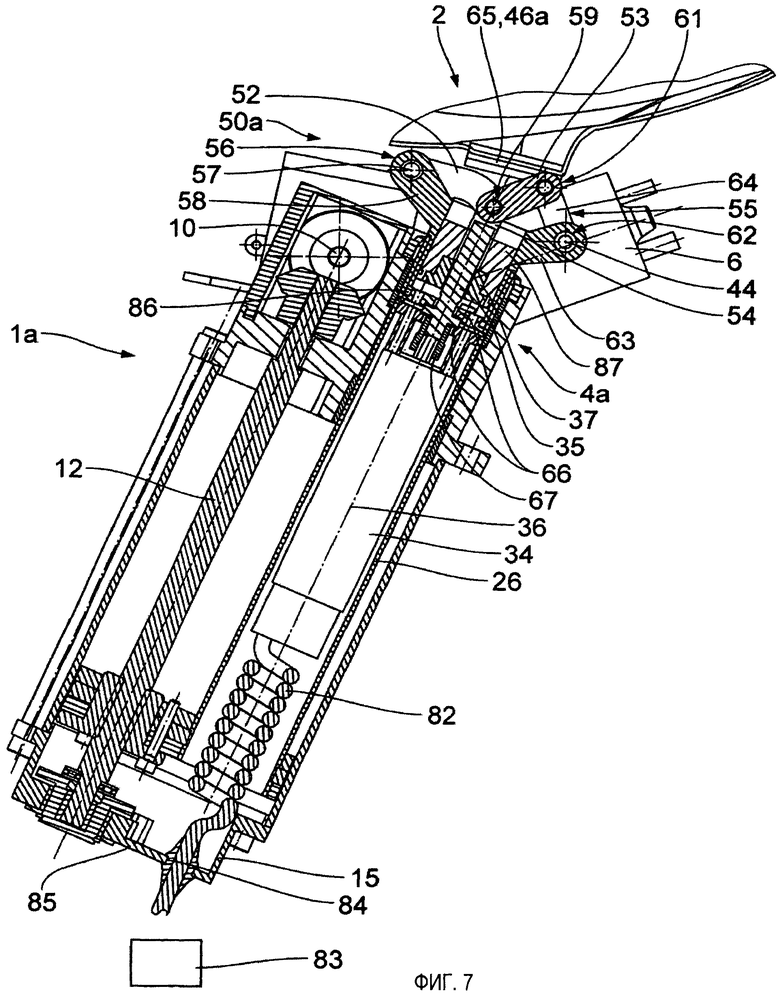
Фиг.7 показывает изображение примерного варианта осуществления согласно фиг.6 с позиционированным аэродинамическим устройством, т.е. аэродинамическим устройством в заданном угловом положении
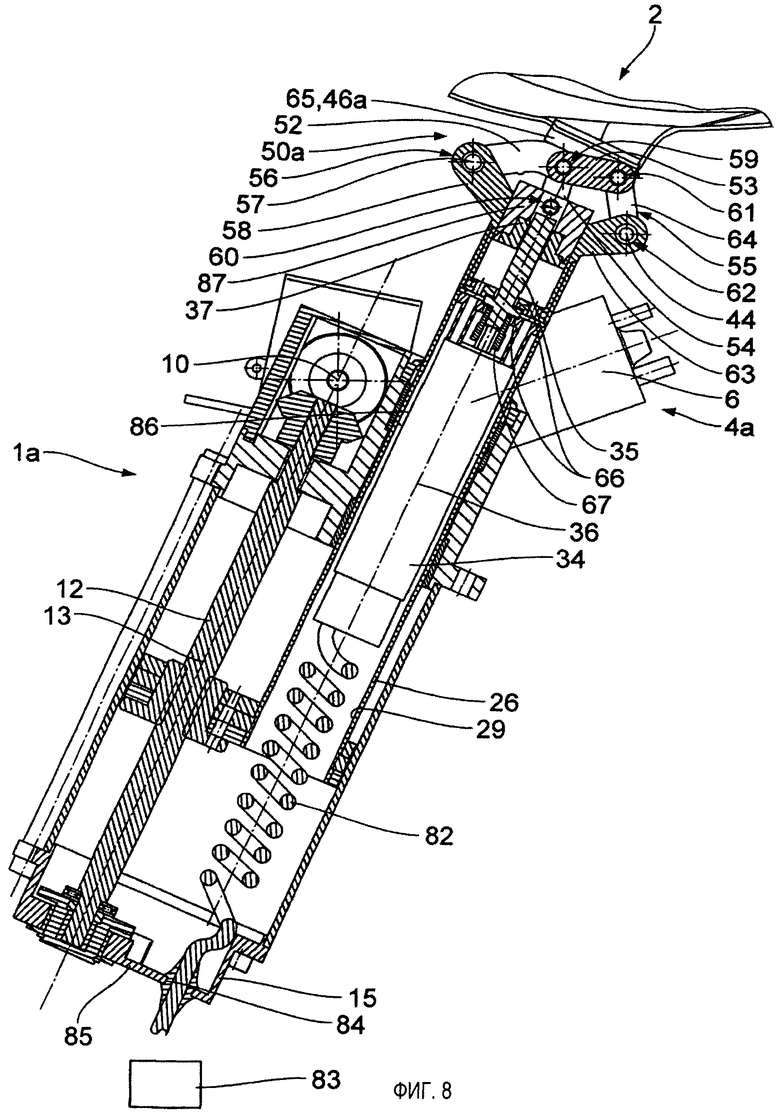
Фиг.8 показывает изображение примерного варианта осуществления согласно фиг.6 с выдвинутым аэродинамическим устройством,
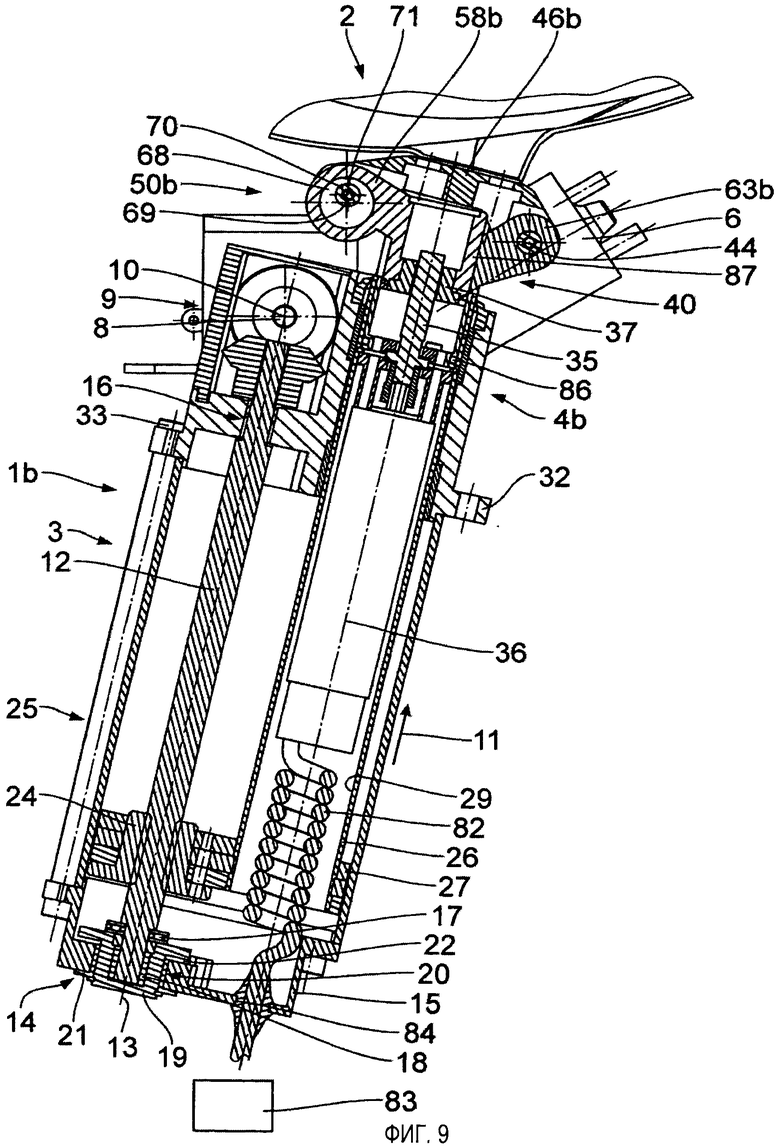
Фиг.9 показывает изображение согласно фиг.2 третьего примерного варианта осуществления данного изобретения,
Фиг.10 показывает изображение примерного варианта осуществления согласно фиг.9 с позиционированным и выдвинутым аэродинамическим устройством,
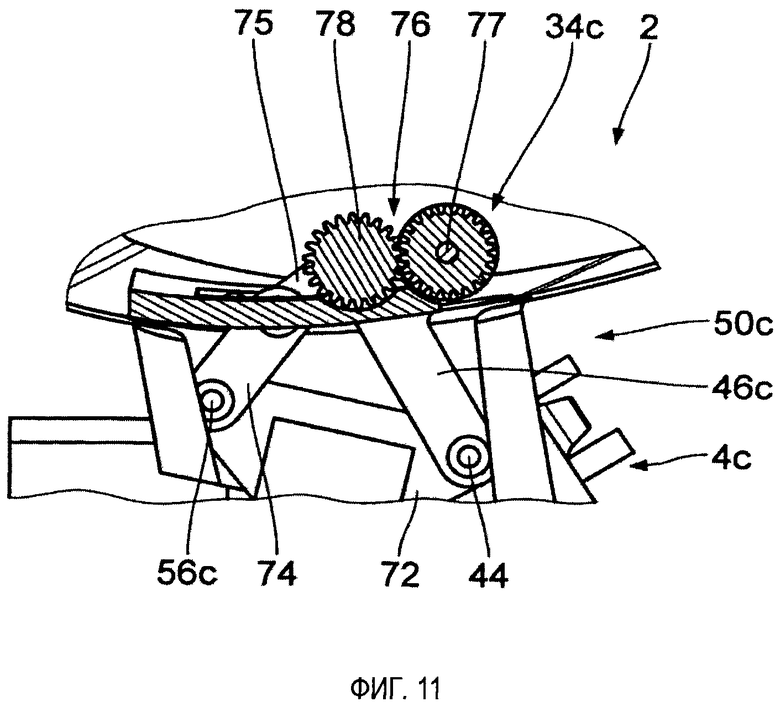
Фиг.11 показывает вид в разрезе изображения четвертого примерного варианта осуществления данного изобретения,
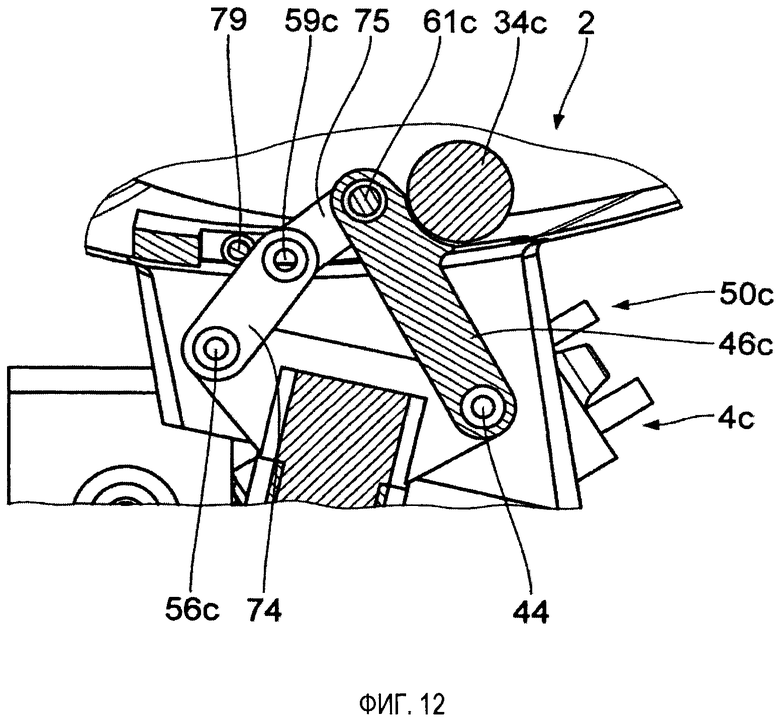
Фиг.12 показывает дополнительный вид в разрезе изображения четвертого примерного варианта осуществления данного изобретения,
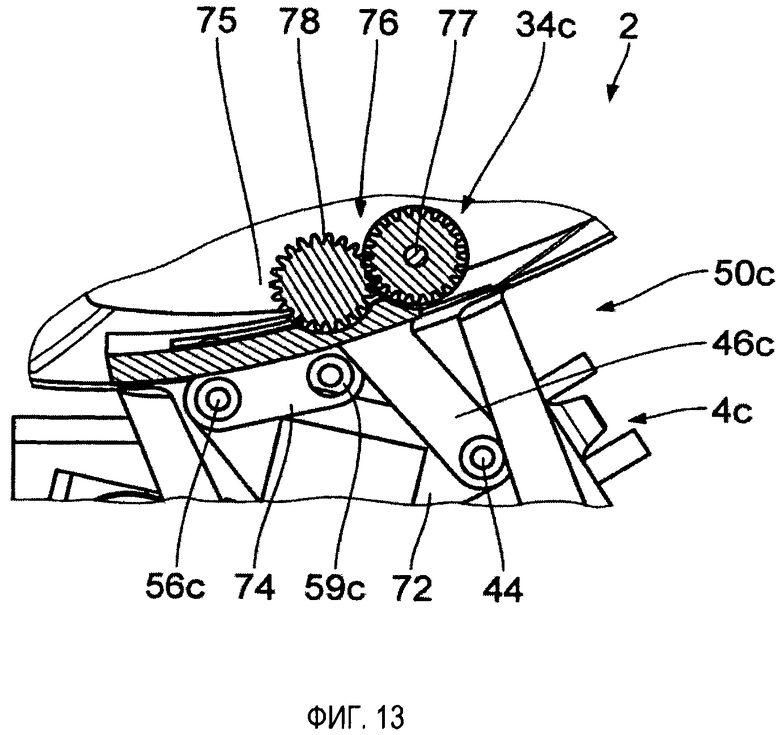
Фиг.13 показывает изображение согласно фиг.11 с позиционированным устройством, направляющим воздух,
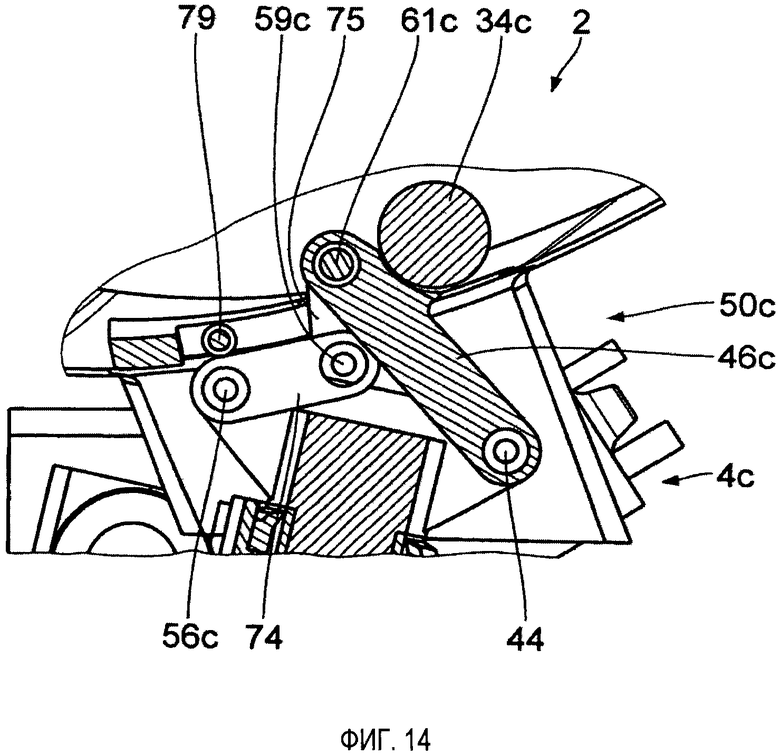
Фиг.14 показывает изображение согласно фиг.12 с позиционированным устройством, направляющим воздух,
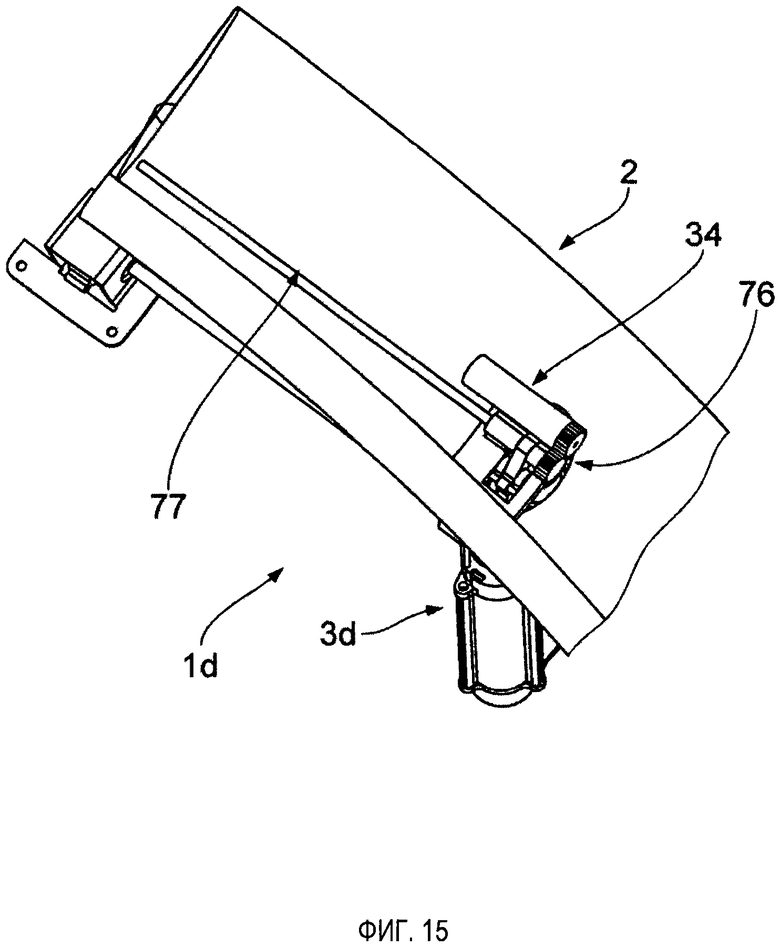
Фиг.15 показывает схематический вид четвертого примерного варианта осуществления указанного выше, и
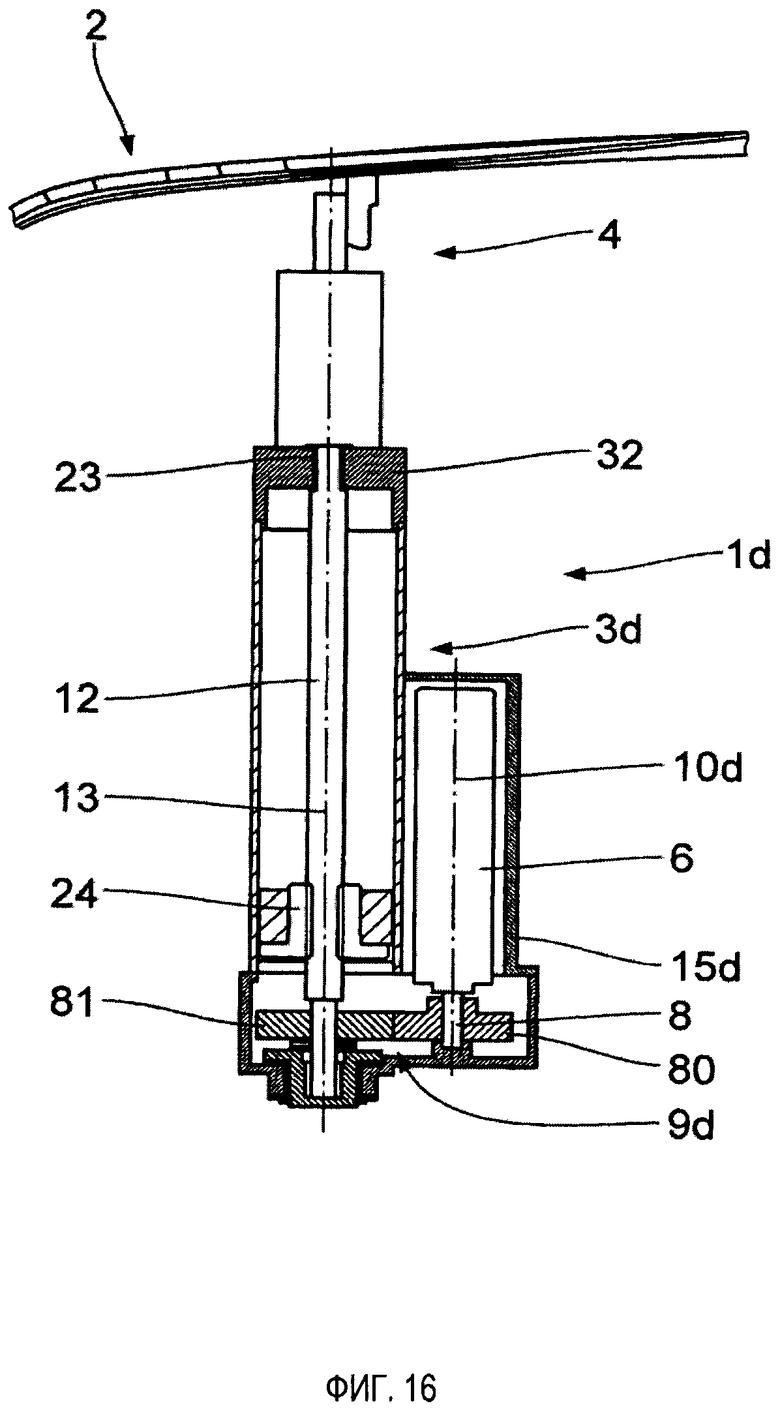
Фиг.16 показывает вид в разрезе изображения пятого примерного варианта осуществления данного изобретения.
Осуществление изобретения
Первый примерный вариант осуществления данного изобретения описан ниже со ссылкой на фиг.1-5. Приспособление 1 для регулирования аэродинамического устройства 2 на моторном транспортном средстве (автомобиле) содержит два, расположенных симметрично по отношению к центральной продольной плоскости 7 автомобиля, выдвигающие устройства 3 и позиционирующие устройства 4, Выдвигающие регулировочные устройства 3 образуют устройство линейного регулирования и служат для регулирования линейного выдвижения аэродинамического устройства 2 вдоль направления 11 выдвижения. Позиционирующие регулировочные устройства 4 формируют устройство регулирования угла и служат для регулирования угла наклона wA аэродинамического устройства 2. Угол наклона wA относится к углу аэродинамического устройства 2 относительно горизонтальной плоскости 5. Точное цифровое значение угла наклона wA далее не является важным. Таким образом, не важно где или как измеряется указанное значение в аэродинамическом устройстве 2 согласно данному изобретению.
Приспособление 1 содержит блок привода, который расположен по центру между выдвигающими устройствами 3, формирующими устройство линейного регулирования и выполнен в виде электродвигателя 6. Электродвигатель 6 соединен с выдвигающими устройствами 3 посредством приводного вала 8. Приводной вал 8 установлен с возможностью вращения вокруг оси 10 приводного вала, которая расположена перпендикулярно к центральной продольной плоскости 7. Приводной вал 8 предпочтительно выполнен жестким. Таким образом, передача силы от электродвигателя 6 к выдвигающим устройствам 3 улучшена. С целью экономии веса, приводной вал 8 может быть выполнен в виде полого вала. Однако, также возможна цельная конструкция. Приводной вал 8 соединен с выдвигающими устройствами 3 посредством зубчатой передачи 9. Зубчатая передача 9 предпочтительно выполнена в виде червячной передачи или конической передачи.
Выдвигающие устройства 3 расположены таким образом, что аэродинамическое устройство 2 регулируется с их помощью вдоль направления 11 выдвижения. Направление 11 выдвижения перпендикулярно оси 10 приводного вала.
Крутящий момент, вырабатываемый электродвигателем 6, может передаваться через приводной вал 8 ходовому винту 12, называемому далее шпинделем 12, выдвигающих устройств 3 посредством зубчатой передачи 9. Шпиндель 12 проходит вдоль оси 13, параллельной направлению 11 выдвижения.
Зубчатая передача предпочтительно имеет самотормозящуюся конструкцию. Она выполнена, в частности, как понижающая передача с передаточным отношением в диапазоне от 1 к 10 до 1 к 200, предпочтительно в диапазоне от 1 к 50 до 1 к 100.
Шпиндель 12 установлен на конце, противоположном зубчатой передаче 9, в корпусе 15 выдвигающего устройства 3 при помощи первой опоры 14. Шпиндель 12 также устанавливается в области на конце, противоположном первой опоре 14 в корпусе 15 при помощи второй опоры 16. Благодаря такой двойной опоре шпиндель 12 расположен в корпусе 15 особенно устойчиво.
Первая опора 14 содержит упорный подшипник 17, муфту 18 свободного хода, привод 19, который расположен во втулке 20 подшипника с фланцем 21, а также тормозной диск 22.
Вторая опора 16 содержит, в частности, радиальный подшипник.
Шпиндельная муфта 24 расположена на шпинделе 12. Шпиндельная муфта 24 имеет внутреннюю резьбу 39, соответствующую шпинделю 12. Шпиндельная муфта закреплена в корпусе 15 без возможности вращения. Шпиндельная муфта 24, таким образом, установлена так, чтобы быть подвижной в корпусе 15 под воздействием вращения шпинделя 12 в направлении оси 13 шпинделя. Шпиндель 12 и шпиндельная муфта 24 формируют первый шпиндельный привод -выдвигающий шпиндельный привод 25.
Выдвигающий шпиндельный привод 25 выполнен с возможностью бесступенчатой фиксации в различных промежуточных положениях. Фиксация выдвигающего шпиндельного привода 25 может выполняться при помощи тормозного диска 22 в первой опоре 14 шпинделя 12. Поэтому выдвигающее устройство 3 надежно защищено от непреднамеренного регулирования. Оно может регулироваться бесступенчато, т.е. позволяет бесступенчатое регулирование высоты выдвижения аэродинамического устройства 2.
Шпиндельная муфта 24 жестко соединена с погружной трубой 26. Погружная труба 26, к примеру, прикреплен при помощи адгезива или приварен к шпиндельной муфте 24. Погружная труба 26 может также быть выполнен как одно целое со шпиндельной муфтой 24. Погружная труба 26 установлен в корпусе 15 таким образом, чтобы быть защищенным от проворота. С этой целью, указанная погружная труба имеет радиально выступающие выступы 27, которые входят в направляющие пазы 28, которые проходят в направлении параллельном шпиндельной оси 13 во внутренней стенке 29 корпуса 15. Однако погружная труба 26 может также быть установлена с возможностью вращения в корпусе 15. Это имеет преимущества, в частности, при монтаже аэродинамического устройства 2 на регулирующем приспособлении 1. Погружная труба 26 имеет стабильную форму и предпочтительно выполнена из металла.
При помощи перемещения шпиндельной муфты 24 вдоль шпиндельной оси 13, погружная труба 26 перемещается вместе с указанной шпиндельной муфтой параллельно направлению 11 выдвижения. Он может выдвигаться из корпуса 15. Для этой цели, корпус 15 имеет отверстие 30. В области отверстия 30 погружная труба 26 установлен в корпус 15 при помощи опоры 31 погружной трубы.
Опора 31 погружной трубы, как и вторая опора 16 шпинделя 12, предпочтительно размещается в крышке 32 корпуса 15, причем крышка снимается с указанного корпуса. Крышка 32 является частью корпуса 15. Она жестко соединяется с ним, в частности, прикручивается при помощи винтов 33. Таким образом, крышка 32 снимается с корпуса 15. Это обеспечивает легкость сборки и, в частности, простоту осмотра и обслуживания регулировочного приспособления 1.
Позиционирующие устройства 4 более подробно описаны ниже. Каждое позиционирующее устройство 4 содержит позиционирующий двигатель 34, который образует устройство привода для позиционирующего устройства 4. В качестве позиционирующего двигателя 34 предпочтительно предусмотрен электродвигатель. Позиционирующий двигатель 34 расположен без возможности вращения в погружной трубе 26 выдвигающего устройства 3. Кроме того, позиционирующий двигатель 34 жестко соединен с погружной трубой 26 в направлении, параллельном оси 13 шпинделя. Таким образом, позиционирующий двигатель 34 встроен в выдвигающее устройство 3.
Позиционирующий двигатель 34 соединен через спиральный кабель 82 с управляющим устройством 83 (изображено только схематически) с блоком электропитания. С этой целью, спиральный кабель 82 проведен через проходное отверстие 84 в основании 85 корпуса 15. По существу, управляющее устройство 83 и/или устройство электропитания может также располагаться в корпусе 15. Спиральный кабель 82 также служит для соединения, с возможностью передачи данных и/или энергии, кодирующего устройства для управления позиционирующим двигателем 34 с управляющим устройством 83. Кодирующее устройство выполнено в виде кругового датчика положения вала или в виде датчика линейных перемещений. Предпочтительно оно содержит датчик Холла.
Кроме того, позиционирующее устройство 4 содержит позиционирующий ходовой винт, далее называемый позиционирующим шпинделем 35. Позиционирующий шпиндель 35 установлен с возможностью вращения, в частности, с возможностью приведения в движение вращательно вокруг оси 36 позиционирующего шпинделя. С этой целью указанный позиционирующий шпиндель соединен с позиционирующим двигателем 34 с возможностью передачи крутящего момента. Ось 36 позиционирующего шпинделя проходит параллельно к оси 13 шпинделя.
Позиционирующая шпиндельная муфта 37 расположена на позиционирующем шпинделе 35. Позиционирующая шпиндельная муфта 37 имеет внутреннюю резьбу 38, совпадающую с позиционирующим шпинделем 35. Позиционирующая шпиндельная муфта 37, следовательно, выполнена с возможностью смещения под воздействием вращения позиционирующего шпинделя 35 в направлении, параллельном оси 36 позиционирующего шпинделя.
Позиционирующая шпиндельная муфта 37 жестко соединена с соединительным элементом 87. Она также может формироваться как одно целое с соединительным элементом 87. Позиционирующая шпиндельная муфта 37 и соединительный элемент 87 ниже упоминаются вместе как позиционирующая шпиндельная муфта 37.
Позиционирующий шпиндель 35 вместе с позиционирующей шпиндельной муфтой 37 формируют второй шпиндельный привод, т.е. позиционирующий шпиндельный привод 40. Позиционирующий шпиндельный привод 40 перемещается вместе с погружной трубой 26 при помощи выдвигающего шпиндельного привода 25 в направлении, параллельном к оси 36 позиционирующего шпинделя, т.е. параллельном к направлению 11 выдвижения. Позиционирующий шпиндельный привод 40 фиксируется бесступенчато в различных промежуточных положениях. Угол наклона wa аэродинамического устройства 2, следовательно, можно устанавливать бесступенчато.
Позиционирующее устройство 4 и выдвигающее устройство 3 приводятся в движение независимо друг от друга.
Для соединения аэродинамического устройства 2 с регулировочным приспособлением 1 на погружной трубе 26 предусмотрен первый крепежный элемент 41. Первый крепежный элемент 41 выполнен как удлинение 42 погружной трубы 26. Отверстие 43, которое проходит перпендикулярно к оси 36 позиционирующего шпинделя, выполнено на удлинении 42. Отверстие 43 определяет позиционирующую ось 44 вращения, вокруг которой аэродинамическое устройство 2 может вращаться при помощи позиционирующего устройства 4. Для этой цели, поворотный штифт 45 устанавливается с возможностью вращения вокруг позиционирующей оси 44 вращения в отверстии 43. Позиционирующая ось 44 вращения формирует неподвижную опору. Поворотный штифт 45 жестко соединен с крепежным элементом 46 аэродинамического устройства 2. Указанный поворотный штифт предпочтительно может быть выполнен как одно целое с крепежным элементом 46. Крепежный элемент 46 своей частью жестко соединен, в частности, привинчен или приварен, к аэродинамическому устройству 2. Он также может быть выполнен как одно целое с аэродинамическим устройством 2.
Конечно, одинаково возможно разместить поворотный штифт 45 жестко на удлинении 42 погружной трубы 26 и снабдить крепежный элемент 46 отверстием 43 для помещения поворотного штифта 45. Соответствующее соединение предпочтительно предоставляется для второго крепления аэродинамического устройства 2 с устройством 4 позиционирования. Для этой цели, установочный штифт 47 жестко соединен с удлинением 48 позиционирующей шпиндельной муфты 37. Установочный штифт 47 направляют через отверстие крепления, которое выполнено в виде продолговатого отверстия 49 в крепежном элементе 46. Продолговатое отверстие 49, имеет точные размеры, таким образом, что установочный штифт 47 направляется с возможностью перемещения в продолговатом отверстии 49 перпендикулярно к продольному направлению без какого-либо люфта. Это позволяет избежать нежелательных дребезжащих звуков вследствие вибраций устройства 2 направляющего воздух. Продолговатое отверстие 49 формирует подвижную опору.
Позиционирующий шпиндельный привод 40 предпочтительно имеет самотормозящуюся конструкцию. Для очень точного взаимодействия позиционирующего устройства 4 и крепежного элемента 46, позиционирующая шпиндельная муфта 37 с удлинением 48 и установочным штифтом 47 и/или крепежным элементом 46 с продолговатым отверстием 49 могут быть выполнены в виде компонентов, фрезерованных на станке с ЧПУ.
При помощи продолговатого отверстия 49 изменение расстояния между позиционирующей осью 44 вращения и установочным штифтом 47 может быть скомпенсировано посредством позиционирующего шпинделя 35 при перемещении позиционирующей шпиндельной муфты 37 в направлении оси 36 позиционирующего шпинделя. Указанное продолговатое отверстие, соответственно, формирует компенсирующее устройство.
Крепление аэродинамического устройства 2 с устройством 4 позиционирования при помощи поворотного штифта 45, установленного в отверстие 43 и установочного штифта 47, установленного в продолговатое отверстие 49, формирует позиционирующий кинематический механизм 50, с помощью которого линейное движение, которое осуществляется посредством позиционирующего шпиндельного привода 40, позиционирующей шпиндельной муфты 37 в направлении, параллельном к оси 36 позиционирующего шпинделя, может быть преобразовано в поворотное движение аэродинамического устройства 2 вокруг позиционирующей оси 44 вращения.
Установка угла атаки wA и/или высоты выдвижения аэродинамического устройства 2 контролируется посредством управляющего устройства 83. Управляющее устройство может определять оптимальные настройки аэродинамического устройства 2, предпочтительно на основании входных сигналов, например, посредством датчиков, в зависимости от состояния окружающей среды и, в особенности, в зависимости от скорости автомобиля, при этом указанные настройки могут задаваться посредством включения двигателей 6, 34. Естественно, допускаются индивидуальные настройки пользователем.
Функционирование регулировочного приспособления 1 описано ниже. Для регулирования высоты выдвижения, шпиндель 12 выдвигающего шпиндельного привода 25 приводится в действие, т.е. вращается вокруг оси 13 шпинделя посредством электродвигателя 6 через приводной вал 8 и зубчатую передачу 9. В данном случае скорость вращения приводного вала 8 понижается посредством зубчатой передачи 9. Результирующая скорость вращения шпинделя 12 предпочтительно менее 1000/мин. Это обеспечивает, в частности, точную и бесшумную регулировку высоты выдвижения аэродинамического устройства 2. Самотормозящаяся конструкция зубчатой передачи 9 обеспечивает плавную регулировку высоты выдвижения аэродинамического устройства 2 посредством выдвигающего устройства 3. Посредством вращения шпинделя 12 шпиндельная муфта 24 перемещается на шпинделе 12 в направлении, параллельном оси 13 шпинделя. Поскольку вращение шпинделя в первом направлении вращения 51 приводит к перемещению шпиндельной муфты 24 в направлении 11 выдвижения, вращения шпинделя 12 в противоположном направлении приводит к перемещению шпиндельной муфты 24 в направлении, противоположном направлению 11 выдвижения. Таким образом, аэродинамическое устройство 2 может выдвигаться и убираться посредством выдвигающих устройств 3.
Посредством перемещения шпиндельной муфты 24 погружная труба 26, соединенная с ней и, таким образом, аэродинамическое устройство 2, соединенное с указанной погружной трубой посредством крепежного элемента 46, также перемещаются в направлении, параллельном направлению 11 выдвижения. Такое регулирование аэродинамического устройства 2 параллельно направлению 11 выдвижения посредством выдвигающего устройства 3, является независимым от регулирования угла атаки wA посредством позиционирующего устройства 4.
Для регулирования угла атаки wA аэродинамического устройства 2 приводится в действие позиционирующий двигатель 34 для привода позиционирующего шпиндельного привода 40. Посредством этого позиционирующий шпиндель 35 вращается вокруг оси 36 позиционирующего шпинделя, таким образом, приводя к перемещению позиционирующей шпиндельной муфты 37 в направлении, параллельном оси 36 позиционирующего шпинделя. Перемещение позиционирующей шпиндельной муфты 37 в направлении, параллельном оси 36, приводит к вращению аэродинамического устройства 2 вокруг позиционирующей оси 44 вращения, которая зафиксирована в положении относительно погружной трубы 26 и, таким образом, относительно позиционирующего шпинделя 35, который расположен в погружной трубе 26 позиционирующего устройства 4. В зависимости от направления вращения позиционирующего шпинделя 35, угол атаки wA, таким образом, увеличивается или уменьшается.
При регулировании угла атаки wA аэродинамического устройства 2 посредством позиционирующего устройства 4 при помощи перемещения шпиндельной муфты 37 на позиционирующем шпинделе 35, результирующее изменение расстояния между установочным штифтом 47, жестко соединенным с позиционирующей шпиндельной муфтой 37, и позиционирующей осью 44 вращения компенсируется посредством перемещения установочного штифта 47 в продолговатом отверстии 49 крепежного элемента 46.
Второй примерный вариант осуществления изобретения описан ниже со ссылками на фиг.6-8. Одинаковые детали обозначены одинаковыми ссылочными номерами, как и в первом примерном варианте осуществления, на описание которого сделана данная ссылка. Функционально идентичные, но конструктивно различные детали обозначены одинаковыми ссылочными номерами, за которыми следует индекс "а". Отличие от первого примерного варианта осуществления заключается в конструкции расположения кинематического механизма 50а, посредством которого аэродинамическое устройство 2 соединяется с позиционирующими устройствами 4а. Позиционирующий кинематический механизм 50а выполнен в виде многорычажного кинематического механизма, в частности, в виде четырехрычажного кинематического механизма. Конструкция позиционирующего кинематического механизма 50а также называется многошарнирным кинематическим механизмом, в частности, пятишарнирным кинематическим механизмом.
Позиционирующий кинематический механизм 50а содержит первый и второй кинематические рычаги 52, 53, приводящий рычаг 54 и стопорный рычаг 55. Первый кинематический рычаг 52 посредством первого шарнира 56 соединен с выступом 58 таким образом, что он может вращаться вокруг первой оси 57 вращения, проходящей перпендикулярно к оси 36 позиционирующего шпинделя. Выступ 58 жестко соединен с погружной трубой 26. Предпочтительно он выполнен как одно целое с погружной трубой 26. Однако он может также быть привинчен, приклеен посредством адгезива или приварен к погружной трубе 26. Первый кинематический рычаг 52 выполнен углообразным или изогнутым. На своем конце, противоположном первому шарниру 56, первый кинематический рычаг 52 соединен посредством второго шарнира 59 со вторым кинематическим рычагом 53 и приводящим рычагом 54. Кроме того, приводящий рычаг 54 соединен посредством третьего шарнира 60 с позиционирующей шпиндельной муфтой 37. На своем конце, противоположном второму шарниру 59, второй кинематический рычаг 53 соединен посредством четвертого шарнира 61 со стопорным рычагом 55. Указанный стопорный рычаг, в конечном итоге, соединен с дополнительным выступом 63 посредством пятого шарнира 62. Выступ 63 предпочтительно выполнен как одно целое с выступом 58. Каждый из шарниров 56, 59, 60, 61 и 62 образует поворотный подшипник, который обеспечивает вращение соответствующего рычага вокруг оси, параллельной первой оси 57 вращения. Четыре рычага 52, 53, 54 и 55 соединены друг с другом с возможностью вращения вокруг осей вращения, проходящих параллельно друг другу, в частности, посредством пяти шарниров 56, 59, 60, 61, 62. В этом случае первый и пятый шарниры 56, 62 формируют жесткую опору, жестко соединенную с погружной трубой 26.
Второй, третий и четвертый шарниры 59, 60 и 61 формируют подвижную опору.
Посредством многорычажных соединений между позиционирующей шпиндельной муфтой 37 и двумя жесткими опорами 56, 62, позиционирующий кинематический механизм 50а формирует компенсирующее устройство для компенсирования изменения расстояния между позиционирующей шпиндельной муфтой 37 и двумя жесткими опорами 56, 62, при этом указанное изменение расстояния неизбежно происходит при перемещении позиционирующей шпиндельной муфты 37 на позиционирующем шпинделе 35.
Стопорный рычаг 55 имеет углообразную конструкцию. Он также может иметь изогнутую конструкцию. Он выполнен с возможностью вращения вокруг пятого шарнира 62, который формирует позиционирующую ось 44 вращения. Стопорный рычаг 55 содержит первое плечо 64 и второе плечо 65. Плечи 64, 65 соединены как одно целое друг с другом. Первое плечо 64 соединяется с пятым шарниром 62 и четвертым шарниром 61. Второе плечо 65 формирует крепежный элемент 46а и служит для крепления к аэродинамическому устройству 2. Оно жестко соединяется, предпочтительно привинчивается к аэродинамическому устройству 2.
В особо предпочтительном варианте осуществления, позиционирующий кинематический механизм 50а выполнен в виде сменного модуля. Он выполнен с возможностью соединения простым способом с погружной трубой 26 с целью установки. Для этой цели он вставляется в тот конец погружной трубы 26, который направлен к аэродинамическому устройству 2 и присоединен, например, приклеен посредством адгезива или приварен, предпочтительно привинчен к указанной погружной трубе. Он уплотнен в этом месте от внутренней стенки 29 погружной трубы 26 посредством кольцевого уплотнения 86.
Позиционирующий шпиндель 35 установлен в опоре 66 позиционирующего шпинделя. Опора 66 позиционирующего шпинделя выполнена, в частности, в виде аксиальной опоры. Однако радиальная опора также возможна. Соединительная муфта 67 предусмотрена для соединения позиционирующего шпинделя 35 с позиционирующим двигателем 34. Соединительная муфта 67 выполнена втулкообразной конструкции. Предпочтительно она выполнена с возможностью блокировки и, таким образом, обеспечивает возможностью бесступенчатой фиксации позиционирующего устройства 4а.
Для регулирования угла атаки wA предусмотрен приводящий рычаг 54. Один конец приводящего рычага 54 соединен посредством второго шарнира 59 с кинематическими рычагами 52 и 53, а другой конец посредством третьего шарнира 60 соединен с позиционирующей шпиндельной муфтой 37. Также в данном примерном варианте осуществления угол атаки wA аэродинамического устройства 2 регулируется посредством вращения позиционирующего шпинделя 35 вокруг оси 36 позиционирующего шпинделя, в результате чего позиционирующая шпиндельная муфта 37, соединенная с приводящим рычагом 54, перемещается на позиционирующем шпинделе 35. Таким образом, приводящий рычаг 54 может перемещаться посредством приведения в действие позиционирующего двигателя 34 позиционирующего устройства 4а. При этом второй шарнир 59 может переводиться через мертвое положение на соединяющей линии между первым шарниром 56 и четвертым шарниром 61. Таким образом, аэродинамическое устройство 2 располагается в динамически устойчивых положениях в двух взаимно противоположных положениях концов позиционирующей шпиндельной муфты 37 на позиционирующем шпинделе 35 позиционирующего устройства 4а. Это значит, в особенности, что сила, прикладываемая аэродинамическим устройством 2 к кинематическому механизму 50а во время нормального функционирования, прямо противодействует отклонению аэродинамического устройства 2 от его конечного положения. Таким образом, автоматически и надежным образом удается избежать непредусмотренного и нежелательного выхода аэродинамического устройства 2 из этих конечных положений.
Мертвое положение второго шарнира 59 находится вблизи положения, соответствующего максимально выдвинутому положению позиционирующей шпиндельной муфты 37. Оно может быть достигнуто, в частности, посредством менее двух поворотов позиционирующего шпинделя 35, начиная от выдвинутого конечного положения позиционирующей шпиндельной муфты 37.
Соединение аэродинамического устройства 2 с позиционирующим устройством 4а посредством трех шарниров 56, 60, 62, расположенных на расстоянии друг от друга, является особо устойчивым и образует надежное крепление аэродинамического устройства 2 к моторному транспортному средству. Устойчивость приспособления 1а дополнительно улучшается посредством конструкции кинематического механизма 50а в виде многошарнирного кинематического механизма с мертвыми точками.
Третий примерный вариант осуществления изобретения описан ниже со ссылками на фиг.9-10. Одинаковые детали обозначены одинаковыми ссылочными номерами, как и в предыдущем примерном варианте осуществления, на описание которого сделана данная ссылка. Функционально идентичные, но конструктивно различные детали обозначены одинаковыми ссылочными номерами, за которыми следует индекс "b".
В третьем примерном варианте осуществления позиционирующий кинематический механизм 50b содержит эксцентрик 68 в качестве компенсирующего устройства для компенсирования изменения расстояния между подвижной опорой и позиционирующей осью 44 вращения при регулировании угла атаки wA. Эксцентрик 68 выполнен в виде кольцевого цилиндрического элемента с осью 69 цилиндра. Ось 69 цилиндра направлена параллельно с позиционирующей осью 44 вращения. Кроме того, эксцентрик 68 содержит эксцентриковую вставку 70, установленную с возможностью вращения в указанном эксцентрике. Эксцентриковая вставка 70 предпочтительно также выполнена кольцевой цилиндрической конструкции. Она установлена в эксцентрике 68 с возможностью вращения вокруг оси 71 вставки. Ось 71 вставки расположена параллельно оси 69 цилиндра. Ось 71 эксцентриковой вставки расположена на расстоянии от оси 69 цилиндра. Таким образом, расстояние между осью 71 вставки и позиционирующей осью 44 вращения может изменяться посредством вращения эксцентрика 68 вокруг оси 69 цилиндра. Таким образом, может компенсироваться изменение расстояния между осью 69 цилиндра и позиционирующей осью 44 вращения при перемещении позиционирующей шпиндельной муфты 37 на позиционирующем шпинделе 35 при регулировании угла атаки wA. При перемещении позиционирующей шпиндельной муфты 37 вдоль оси 36 позиционирующего шпинделя и результирующем перемещении второго выступа 63b параллельно оси 36 позиционирующего шпинделя, эксцентрик 68 вращается вокруг оси 69 цилиндра именно таким образом, что расстояние между осью 71 эксцентричной вставки и позиционирующей осью 44 вращения остается постоянным.
Поскольку второй выступ 63b жестко соединен с погружной трубой 26 как во втором примерном варианте осуществления, в третьем примерном варианте осуществления первый выступ 58b жестко соединен с позиционирующей шпиндельной муфтой 37. Таким образом, первый выступ 58b может перемещаться вместе с позиционирующей шпиндельной муфтой 37 параллельно оси 36 позиционирующего шпинделя посредством вращения позиционирующего шпинделя 35 вокруг последней.
Эксцентриковая вставка 70 служит для соединения позиционирующего шпиндельного привода 40 с аэродинамическим устройством 2. Указанная эксцентриковая вставка жестко соединена с крепежным элементом 46b. Эксцентриковая вставка 70 предпочтительно выполнена как одно целое с крепежным элементом 46b.
В особо предпочтительном варианте осуществления, позиционирующий кинематический механизм 50b выполнен в виде сменного модуля. Он может соединяться простым способом с погружной трубой 26 с целью установки. Для этой цели он вставляется в тот конец погружной трубы 26, который направлен к аэродинамическому устройству 2 и присоединен, например, приклеен посредством адгезива или приварен, предпочтительно привинчен к указанной погружной трубе. Он уплотнен в данном случае от внутренней стенки 29 погружной трубы 26 посредством кольцевого уплотнения 86.
Четвертый примерный вариант осуществления изобретения описан ниже со ссылками на фиг.11-15. Одинаковые детали обозначены одинаковыми ссылочными номерами, как и в предыдущем примерном варианте осуществления, на описание которого сделана данная ссылка. Конструктивно различные, но функционально идентичные детали обозначены одинаковыми ссылочными номерами, за которыми следует индекс "с". В четвертом примерном варианте осуществления позиционирующее устройство 4с встроено в аэродинамическое устройство 2. Конец погружной трубы 26, направленный к аэродинамическому устройству 2, закрыт посредством соединительного элемента 72. Соединительный элемент 72 выполнен в виде конструкции, похожей на наковальню. Первое крепление 56 с и жесткая опора, которые образуют позиционирующую ось 44 вращения, для соединения аэродинамического устройства 2 с погружной трубой 26 расположены в соединительном элементе 72. Аэродинамическое устройство 2 установлено с возможностью вращения вокруг позиционирующей оси 44 вращения посредством крепежного элемента 46с, выполненного в виде рычага. Крепежный элемент 46с формирует основной корпус, к которому жестко прикреплено устройство 2 направляющее воздух. Устройство 2 может также быть выполнено как одно целое с крепежным элементом 46c.
Первый кулисный рычаг 74 установлен в первом креплении 56c. Первый кулисный рычаг 74 соединен с возможностью вращения посредством второго шарнира 59с со вторым кулисным рычагом 75. Второй кулисный рычаг 75, в свою очередь, соединен с возможностью вращения посредством второго шарнира 61с с крепежным элементом 46 с.Позиционирующий кинематический механизм 50с, таким образом, имеет четыре оси вращения, расположенные параллельно друг другу. Он формирует компенсирующее устройство для компенсирования изменения расстояния между четвертым шарниром 61с и первым шарниром 56с при регулировании угла атаки wA аэродинамического устройства 2.
Зубчатое колесо 78 соединено со вторым кулисным рычагом 75. Зубчатое колесо 78 расположено концентрично относительно четвертого шарнира 61c. С помощью зубчатого колеса 78, второй куличный рычаг 75 может вращаться посредством позиционирующего двигателя 34 вокруг оси вращения, образованной четвертым шарниром 61с. Второй кулисный рычаг 75, таким образом, соединен с возможностью вращательного привода с позиционирующим двигателем 34c. Зубчатое колесо 78 является частью зубчатой передачи 76. Зубчатая передача 76 предпочтительно выполнена в виде понижающей передачи. Вращение приводного вала 77, таким образом, приводит к менее, чем одному полному повороту зубчатого колеса 78.
Однако второй кулисный рычаг 75 может также напрямую соединяться с приводным валом 77, который выполнен с возможностью вращательного привода посредством позиционирующего двигателя 34с. Приводной вал 77 предпочтительно выполнен в виде соединительного вала между двумя позиционирующими устройствами 4с, расположенными симметрично относительно центральной продольной плоскости 7. Это обеспечивает синхронное включения левого и правого позиционирующих устройств 4C.
Второй шарнир 59c может переводиться через мертвое положение при повороте второго кулисного рычага 75 вокруг четвертого шарнира 61c. Мертвое положение возникает именно в тот момент, когда второй шарнир 59c располагается на соединяющей линии между первым шарниром 56c и четвертым шарниром 61c.
Для ограничения поворота аэродинамического устройства 2 предусмотрен передвижной ограничительный элемент 79. Ограничительный элемент 79 определяет конечное положение, в котором первый кулисный рычаг 74 начинает упираться в ограничительный элемент 79. Кроме того, второй соответствующий ограничительный элемент предпочтительно предусмотрен для определения второго конечного положения.
Угол атаки wA аэродинамического устройства 2 может регулироваться посредством вращения второго кулисного рычага 75 вокруг четвертого шарнира 61с.
Пятый примерный вариант осуществления изобретения описан ниже со ссылками на фиг.16. Одинаковые детали обозначены одинаковыми ссылочными номерами, как и в предыдущем примерном варианте осуществления, на описание которого сделана данная ссылка. Конструктивно различные, но функционально идентичные детали обозначены одинаковыми ссылочными номерами, за которыми следует индекс "а". В пятом примерном варианте осуществления электродвигатель 6 выдвигающих устройств 3d встроен в корпус 15d. В данном примерном варианте осуществления ось 10d приводного вала расположена параллельно с осью 13 шпинделя. Приводной вал 8, приводимый электродвигателем 6, установлен на его конце, противоположно электродвигателю 6 в корпусе 15d. Приводное зубчатое колесо 80 предусмотрено на приводном валу 8. Указанное приводное зубчатое колесо находится в зацеплении с приводимым зубчатым колесом 81. Приводное зубчатое колесо 80 и приводимое зубчатое колесо 81 формируют зубчатую передачу 9d. Приводимое зубчатое колесо 81 соединено со шпинделем 12 для совместного вращения. В данном примерном варианте осуществления регулировка угла осуществляется согласно одному из ранее описанных вариантов осуществления.


Группа изобретений относится к области автомобилестроения. Приспособление для регулирования аэродинамического устройства на автомобиле содержит устройство линейного регулирования и устройство регулирования угла. Устройство линейного регулирования выполнено с возможностью регулирования линейного выдвижения аэродинамического устройства. Устройство регулирования угла выполнено с возможностью регулирования угла атаки аэродинамического устройства. Регулировочные устройства соединены с аэродинамическим устройством с возможностью передачи усилия для его регулирования. Каждое из устройств линейного регулирования и устройств регулирования угла имеет шпиндельный привод. Система содержит аэродинамическое устройство для автомобиля и приспособление, соединенное с аэродинамическим устройством с возможностью передачи усилия для его регулирования. Автомобиль с аэродинамическим устройством, снабженным приспособлением для регулирования аэродинамического устройства. 3 н. и 11 з.п. ф-лы, 16 ил.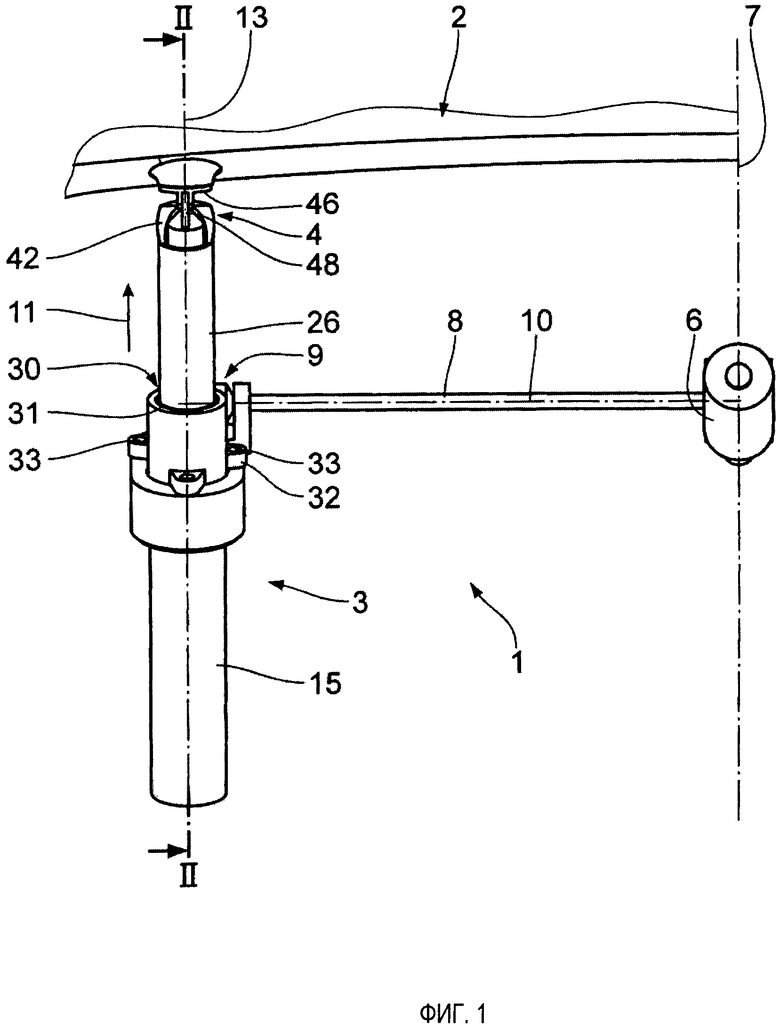
1. Приспособление (1; 1a; 1b; 1c; 1d) для регулирования аэродинамического устройства (2) на автомобиле, содержащее
- по меньшей мере, одно устройство (3; 3d) линейного регулирования для регулирования линейного выдвижения аэродинамического устройства (2), и
- по меньшей мере, одно устройство (4; 4a; 4b; 4c) регулирования угла для регулирования угла атаки (wA) аэродинамического устройства (2),
- причем регулировочные устройства (3, 4; 4a; 4b; 4c; 3d) соединены с аэродинамическим устройством (2) с возможностью передачи усилия для его регулирования,
- причем, по меньшей мере, одно из устройств (3, 4; 4a; 4b; 4c; 3d) регулирования имеет, по меньшей мере, один шпиндельный привод (25, 40),
- причем, каждое из, по меньшей мере, одного устройства (3; 3d) линейного регулирования и, по меньшей мере, одного устройства (4; 4a; 4b; 4c) регулирования угла имеет, по меньшей мере, один шпиндельный привод (25, 40).
2. Приспособление по п.1, отличающееся тем, что регулировочные устройства (3, 4; 4a; 4b; 4c; 3d) выполнены с возможностью привода в действие независимо друг от друга.
3. Приспособление по п.1, отличающееся тем, что, по меньшей мере, одно из регулировочных устройств (3, 4; 4a; 4b; 4c; 3d) выполнено с возможностью бесступенчатой фиксации в промежуточных положениях.
4. Приспособление по п.1, отличающееся тем, что и по меньшей мере, одно устройство (3; 3d) линейного регулирования и, по меньшей мере, одно устройство (4; 4a; 4b; 4c) регулирования угла атаки выполнены с возможностью бесступенчатой фиксации в промежуточных положениях.
5. Приспособление по любому из пп.1-4, отличающееся тем, что, по меньшей мере, одно устройство (4; 4a; 4b) регулирования угла интегрировано в, по меньшей мере, одно устройство (3; 3d) линейного регулирования.
6. Приспособление по одному из пп.1-4, отличающееся тем, что, по меньшей мере, одно устройство (4c) регулирования угла интегрировано в аэродинамическое устройство (2).
7. Приспособление по любому из пп.1-4, отличающееся тем, что, по меньшей мере, одно регулировочное устройство (3, 4; 4a; 4b; 4c; 3d) содержит двухопорный шпиндель (12).
8. Приспособление по любому из пп.1-4, отличающееся тем, что, по меньшей мере, одно устройство (4; 4a; 4b; 4c) регулирования угла имеет, по меньшей мере, один кинематический механизм (50) для преобразования линейного движения во вращательное движение.
9. Приспособление по любому из пп.1-4, отличающееся тем, что, по меньшей мере, одно регулировочное устройство (3, 4; 4a; 4b; 4c; 3d) соединено с аэродинамическим устройством (2) посредством, по меньшей мере, двух мест соединения, находящихся на расстоянии друг от друга.
10. Приспособление по п.10, отличающееся тем, что места соединения устройства (4; 4a; 4b; 4c) регулирования угла с аэродинамическим устройством (2) находятся на изменяемом расстоянии друг от друга.
11. Приспособление по п.11, отличающееся тем, что предусмотрено компенсирующее устройство (49; 50a; 50b; 50c) для компенсирования изменения расстояния между указанными местами соединения.
12. Приспособление по п.12, отличающееся тем, что компенсирующее устройство выполнено в виде продолговатого отверстия (49), многорычажного соединения (50a; 50c) или эксцентрика (68).
13. Система, содержащая:
- аэродинамическое устройство (2) для автомобиля,
- и приспособление (1) по одному из предыдущих пунктов, соединенное с указанным аэродинамическим устройством с возможностью передачи усилия для его регулирования.
14. Автомобиль с аэродинамическим устройством, снабженным приспособлением, заявленным в любом из пп.1-12.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| JP 2005212719 A, 11.08.2005 | |||
| JP 5112265 A, 07.05.1993 | |||
| Устройство для формования изделий из бетонных смесей в форме | 1982 |
|
SU1118529A1 |
| Подшипник качения | 1988 |
|
SU1693285A1 |
| СИСТЕМА РЕГУЛИРУЕМЫХ АЭРОДИНАМИЧЕСКИХ СТАБИЛИЗАТОРОВ ДЛЯ АВТОМОБИЛЯ | 1999 |
|
RU2169679C1 |
| АЭРО(ГИДРО)ДИНАМИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2163207C1 |

