Изобретение относится к области резервирования и повышения надежности функционирования сложных электронных устройств, а именно к способам и устройствам резервирования плат измерительного гироскопического канала в ракетной технике.
Известен способ функционального резервирования измерительного канала космического аппарата, заключающийся в измерении сигнала угловой скорости по 4-м осям КА и трехкратном резервировании измеренных сигналов [1].
Известно также устройство функционального резервирования измерительного канала космического аппарата, содержащее три монтажные платы, на каждой из которых установлено по четыре реверсивных счетчика, вход первого, второго, третьего и четвертого реверсивных счетчиков каждой платы соединены с выходом соответственно первого, второго, третьего и четвертого гироскопов [1].
К недостаткам известного способа и устройства функционального контроля и резервирования измерительного канала космического аппарата относится низкая надежность функционирования измерительного канала.
С целью повышения надежности способа функционального контроля и резервирования измерительного канала угловой скорости космического аппарата определяют сигналы приращений каждого из четырех резервированных сигналов за определенный временной интервал, формируют из них для каждого из трех резервированных измеренных сигналов угловой скорости сигнал «медианы», из сигнала каждой «медианы» вычитают один из соответствующих резервированных сигналов приращений и при превышении каждой из полученных разностей первого порогового сигнала формируют сигнал недостоверности этого сигнала, а при превышении сигналами «медианы» второго порогового сигнала формируют сигнал недостоверности сигнала «медианы».
Устройство функционального контроля и резервирования измерительного канала космического аппарата отличается тем, что оно содержит блоки ограничения сигнала медианы, формирователи сигнала недостоверности, выходы всех реверсивных счетчиков через соответствующие формирователи сигнала недостоверности подключены к соответствующим выходам устройства, вторые входы первого, второго, третьего и четвертого формирователей сигнала недостоверности соединены соответственно с первым, вторым, третьим и четвертым входами устройства и входами соответственно первого, второго, третьего и четвертого блока ограничения сигнала «медианы».
Формирователи сигнала недостоверности при этом выполнены идентичными в виде последовательно соединенных первого сумматора, второго сумматора и нелинейного блока, выход реверсивного счетчика соединен непосредственно через блок задержки соответственно с первым и вторым входами первого сумматора, первый и второй входы второго сумматора подключены соответственно ко второму выходу и второму входу формирователя сигнала недостоверности.
Суть изобретения поясняется фиг.1, фиг.2, фиг.3 и фиг.4.
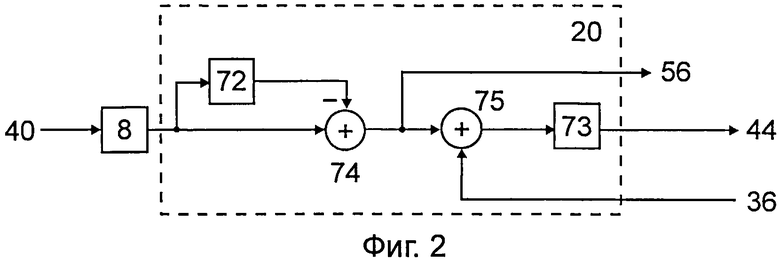
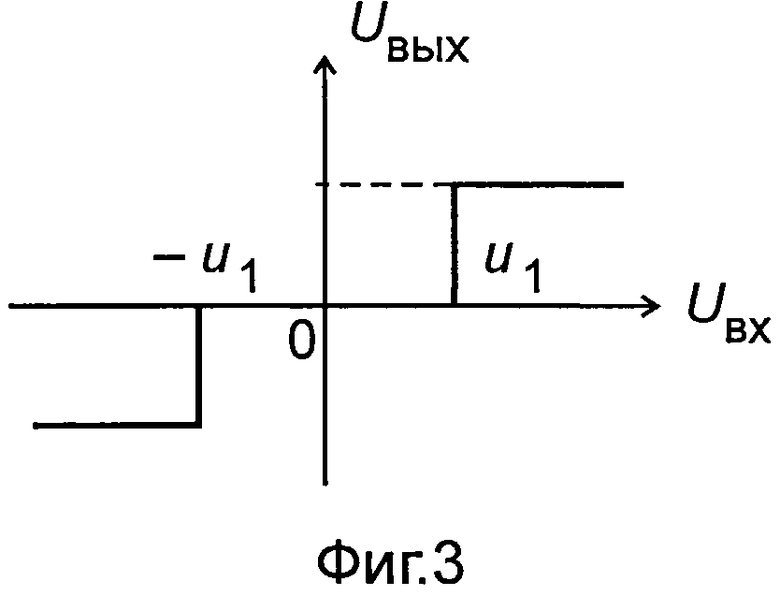
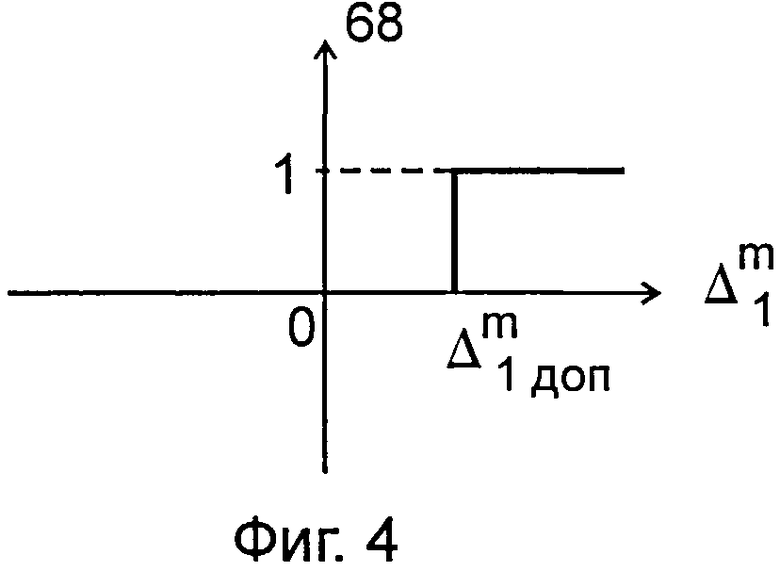
На фиг.1 изображена структурная схема устройства функционального резервирования измерительного канала космического аппарата, на фиг.2 - структура формирователя сигнала недостоверности, на фиг.3 - статическая характеристика нелинейного блока, а на фиг.4 - статическая характеристика блока ограничения сигнала «медианы», на которых были приняты следующие обозначения:
1, 2, 3, 4 - соответственно первый, второй, третий и четвертый гироскопы;
5, 6, 7 - соответственно первая, вторая и третья (монтажная) плата; 8, 9, 10, 11 - соответственно первый, второй, третий и четвертый реверсивные счетчики первой платы 5;
12, 13, 14, 15 - соответственно первый, второй, третий и четвертый реверсивные счетчики второй платы 6;
16, 17, 18, 19 - соответственно первый, второй, третий и четвертый реверсивные счетчики третьей платы 7;
20, 21, 22, 23 - соответственно первый, второй, третий, четвертый формирователи сигнала недостоверности первой платы 5;
24, 25, 26, 27 - соответственно первый, второй, третий, четвертый формирователи сигнала недостоверности второй платы 6;
28, 29, 30, 31 - соответственно первый, второй, третий, четвертый формирователи сигнала недостоверности третьей платы 7;
32, 33, 34, 35 - соответственно первый, второй, третий, четвертый блоки ограничения сигнала «медианы»;
36, 37, 38, 39 - соответственно первый, второй, третий и четвертый входы устройства - входы, на которые поступают сигналы «медианы»;
40, 41, 42, 43 - соответственно выходы первого, второго, третьего и четвертого гироскопов;
44, 45, 46, 47 - соответственно первый, второй, третий, четвертый выходы первой платы 5; 48, 49, 50, 51 - второй платы 6; 52, 53, 54, 55 - третьей платы 7, причем выходы 44-55 являются первыми выходами устройства, выходы 56-67 - вторыми;
56, 57, 58, 59 - соответственно первый, второй, третий, четвертый выходы первой платы 5; 60, 61, 62, 63 - второй платы 6 и 64, 65, 66, 67 - третьей платы 7, а выходы 68, 69, 70, 71 - первый, второй, третий, четвертый выходы блоков ограничения сигнала «медианы» соответственно 32, 33, 34, 35;
72 - блок чистого запаздывания;
73 - нелинейный блок;
74 - первый, 75 - второй сумматоры.
Функционирует устройство, реализующее способ функционального контроля и резервирования плат измерительного канала угловой скорости летательного аппарата, следующим образом (см. фиг.1).
Первый, второй, третий и четвертый гироскопы измеряют угловую скорость космического аппарата. При этом на их выходах получаем соответственно сигналы 40, 41, 42 и 43. Каждый из сигналов угловой скорости с выхода гироскопа наступает на вход одного из четырех реверсивных счетчиков каждой из плат 5, 6, 7. На каждой плате четыре идентичных по структуре измерительных канала в виде последовательно соединенных реверсивного счетчика и формирователя сигнала недостоверности. Для первого канала измерения первой платы 5 измерительный канал состоит из первого реверсивного счетчика 8 и первого формирователя сигнала недостоверности 20. Если первый сигнал медианы 36 для первого измерительного канала 5 превышает ограничение, установленное в первом блоке ограничения сигнала медианы 32, то на выходе первого формирователя сигнала недостоверности 20 получаем сигнал 44 (не равный нулю), что свидетельствует о недостоверности сигнала измерения 40. О правильности измерения сигнала угловой скорости 40 свидетельствует нулевой сигнал 44 и нулевой сигнал медианы 68.
Идентичные каналы для второй платы 6 - соединение второго реверсивного счетчика 12 и второго формирователя сигнала неисправности 24, первый сигнал медианы 36 и первый блок ограничения сигнала медианы 32, для третьей платы 7 - соединение третьего реверсивного счетчика 16, третьего формирователя сигнала недостоверности 28, первого сигнала медианы 36 и первого блока ограничения сигнала медианы 32.
Аналогично построены и функционируют измерительные каналы с остальных трех гироскопов 2, 3 и 4.
Идентично построены и формирователи сигнала недостоверности. На фиг.2 приведен пример построения такого формирователя, состоящего из последовательного соединения блока чистого запаздывания 72, первого сумматора 74, второго сумматора 75 и нелинейного блока 73.
При этом первый пороговый сигнал u2 устанавливается во всех нелинейных блоках 73 (фиг.3) одинаковым, а второй пороговый сигнал 

На примере первого формирователя сигнала недостоверности 20 рассмотрим процесс его функционирования. Сигнал 40 с выхода первого гироскопа через реверсивный счетчик 8 поступает на первый вход первого сумматора 74, на второй его вход поступает задержанный в блоке чистого запаздывания 72 на такт (0,1 сек) сигнал, который вычитается из сигнала с выхода счетчика 8. В результате получается сигнал приращения 

- если два любых сигнала приращения совпадают, то сигнал медианы равен одному из этих приращений;
- если одно из приращений является средним из трех приращений, то оно выбирается в качестве сигнала медианы.
В том случае, если два приращения совпадают и равны нулю, за сигнал медианы принимается значение третьего ненулевого приращения.
Для первого канала третьей платы 7 

Задатчик сигнала медианы по вышеописанному алгоритму на фиг.1 не указан.
Далее после получения сигнала медианы 

Таким образом, устройство функционального контроля и резервирования имеют четыре канала проверки достоверности измерений каждого гироскопа на каждой плате. Всего получается двенадцать каналов измерения. Вышедшей из строя платой считается плата, на которой все четыре канала выдают недостоверную информацию об угловой скорости со космического аппарата, т.е. на всех выходах 44-47 первой платы 5, или 48-51 второй платы 6, или 52-55 третьей платы 7.
Таким образом, нулевые сигналы на выходах нелинейных блоков 73 для первого канала платы 5 сигнализируют об исправности плат, т.к. идентичных плат три, то в этом случае имеет место трехкратное резервирование функционально проверенных исправных трех плат 5, 6, 7.
Технический результат от использования заявленного технического решения (способа и устройства, его реализующего) заключается в повышении надежности функционирования плат с достоверной информацией об измеряемой угловой скорости со вращения космического аппарата.
Изобретательский уровень заявленных способа и устройства, его реализующего, подтверждается отличительной частью п.п.1, 2, 3 формулы изобретения.
Литература
1. М. Косткин, П. Поздняков, А. Попович. Концепция информационно-управляющей системы космического аппарата. Электроника: Наука, Технология Бизнес. - №4. 2008. Стр. 85-88 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТЕЙ ГИРОСКОПИЧЕСКОГО ИЗМЕРИТЕЛЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2495379C2 |
| СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2012891C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2015 |
|
RU2597463C2 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| Оптоэлектронное реле питания резервированных систем | 2020 |
|
RU2746556C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| СПОСОБ ПАРИРОВАНИЯ ПЕРЕГРУЗОК ПО ТОКУ В ЭЛЕКТРОННОМ БЛОКЕ КОСМИЧЕСКОГО АППАРАТА, ОБУСЛОВЛЕННЫХ ВНЕШНИМИ ВОЗДЕЙСТВУЮЩИМИ ФАКТОРАМИ, ВКЛЮЧАЯ ТИРИСТОРНЫЙ ЭФФЕКТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599089C1 |
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ | 1991 |
|
RU2042113C1 |
Изобретение относится к области систем функционального резервирования электронных плат, а именно к резервированию плат измерительного канала космического аппарата. Отличием способа функционального резервирования измерительного канала является то, что определяют сигналы приращений каждого из четырех резервированных сигналов за определенный временной интервал, формируют из них для каждого из трех резервированных измеренных сигналов угловой скорости сигнал «медианы», из сигнала каждой «медианы» вычитают один из соответствующих резервированных сигналов приращений и при превышении каждой из полученных разностей первого порогового сигнала формируют сигнал недостоверности этого сигнала, а при превышении сигналами «медианы» второго порогового сигнала формируют сигнал недостоверности сигнала «медианы». Устройство, реализующее способ резервирования, отличается тем, что оно содержит блоки ограничения сигнала медианы, формирователи сигнала недостоверности, выходы всех реверсивных счетчиков через соответствующие формирователи сигнала недостоверности подключены к соответствующим выходам устройства, вторые входы первого, второго, третьего и четвертого формирователей сигнала недостоверности соединены соответственно с первым, вторым, третьим и четвертым входами устройства и входами соответственно первого, второго, третьего и четвертого блока ограничения сигнала «медианы». При этом формирователи сигнала недостоверности выполнены идентичными в виде последовательно соединенных первого сумматора, второго сумматора и нелинейного блока, выход реверсивного счетчика соединен непосредственно через блок задержки соответственно с первым и вторым входами первого сумматора, первый и второй входы второго сумматора подключены соответственно ко второму выходу и второму входу формирователя сигнала недостоверности. Технический результат от использования предложенного технического решения (способа и устройства) заключается в повышении надежности функционирования измерительного канала угловой скорости космического аппарата. 2 н. и 1 з.п. ф-лы, 4 ил.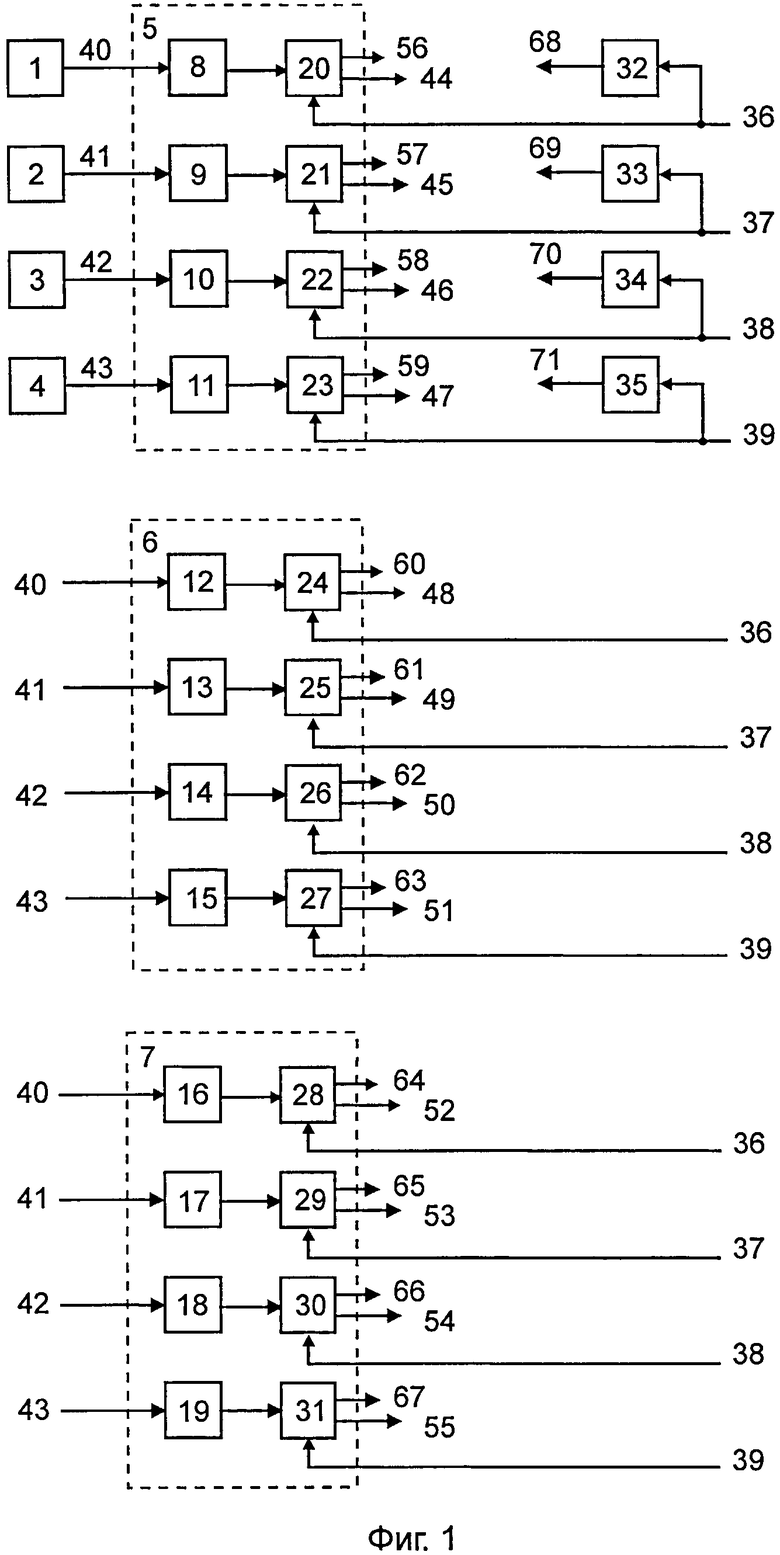
1. Способ функционального контроля и резервирования плат измерительного канала угловой скорости космического аппарата, заключающийся в одновременном измерении сигналов проекций вектора угловой скорости космического аппарата на неортогональные оси чувствительности четырех одноосевых гироскопических измерителей угловой скорости и в трехкратном резервировании измеренных сигналов, отличающийся тем, что определяют сигналы приращений каждого из четырех резервированных сигналов за определенный временной интервал, формируют из них для каждого из трех резервированных измеренных сигналов угловой скорости сигнал «медианы», из сигнала каждой «медианы» вычитают один из соответствующих резервированных сигналов приращений и при превышении каждой из полученных разностей первого порогового сигнала формируют сигнал недостоверности этого сигнала, а при превышении сигналами «медианы» второго порогового сигнала формируют сигнал недостоверности сигнала «медианы».
2. Устройство для реализации способа по п.1, содержащее три монтажные платы, на каждой из которых установлено по четыре реверсивных счетчика, вход первого, второго, третьего и четвертого реверсивных счетчиков каждой платы соединены с выходом соответственно первого, второго, третьего и четвертого гироскопов, отличающееся тем, что оно содержит блоки ограничения сигнала медианы, формирователи сигнала недостоверности, выходы всех реверсивных счетчиков через соответствующие формирователи сигнала недостоверности подключены к соответствующим выходам устройства, вторые входы первого, второго, третьего и четвертого формирователей сигнала недостоверности соединены соответственно с первым, вторым, третьим и четвертым входами устройства и входами соответственно первого, второго, третьего и четвертого блоков ограничения сигнала «медианы».
3. Устройство по п.2, отличающееся тем, что формирователи сигнала недостоверности выполнены идентичными в виде последовательно соединенных первого сумматора, второго сумматора и нелинейного блока, выход реверсивного счетчика соединен непосредственно через блок задержки соответственно с первым и вторым входами первого сумматора, первый и второй входы второго сумматора подключены соответственно ко второму выходу и второму входу формирователя сигнала недостоверности.
| КОСТКИН М | |||
| и др | |||
| Концепция информационно-управляющей системы космического аппарата | |||
| - Электроника: Наука, Технология, Бизнес 2008, №4, с.85-88 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Устройство для статистическогоМОдЕлиРОВАНия пРОцЕССОВ эКСплу-АТАции СиСТЕМ упРАВлЕНия | 1978 |
|
SU805328A1 |
| US 7937588 B2, 03.05.2011 | |||
| US 6615366 B1, 02.09.2003. | |||

