Изобретение относится к области автоматического управления и может быть использовано при построении высоконадежных резервированных устройств и систем управления, содержащих измерители параметров движения с числоимпульсным выходом (датчики угловой скорости, акселерометры и т.д.), где требуется наряду с достижением высокой надежности достижение высокой точности.
Известно устройство для определения параметров пространственного положения объекта [1], содержащее сумматор, коммутатор, дешифратор и n каналов управления, каждый из которых включает в себя измеритель параметра движения с дискретным выходом.
Недостаток этого устройства состоит в большой избыточности и низкой точности.
Наиболее близким решением к предлагаемому является устройство для определения параметров пространственного положения объекта [2], содержащее измеритель параметра движения, блок выбора конфигурации, масштабирующий сумматор, первый счетчик и n измерительных каналов, каждый из которых содержит масштабирующий блок.
Недостаток этого устройства состоит в сложности реализации и низкой точности. Измеритель параметра движения имеет, как правило, дискретный выход, который характеризуется числом выходных импульсов измерителя за заданное время, при этом каждый импульс соответствует заданному приращению Δ измеряемого параметра. Низкая точность известного решения [2] обусловлена тем, что каждый измеритель параметра движения имеет свойственную ему цену выходного импульса Δi и свойственное ему смещение нулевого сигнала, что не учитывает известное устройство, а это приводит к значительному снижению точности.
Задача изобретения - повышение точности определения параметров пространственного положения объекта.
Эта задача достигается тем, что в устройство для определения параметров пространственного положения объекта, содержащее масштабирующий сумматор, первый счетчик и n масштабирующих блоков, дополнительно введены блок выбора среднего сигнала, первый и второй ключи, второй счетчик, первый и второй одновибраторы, первый и второй элементы задержки и генератор импульсов, выход которого соединен с входом первого счетчика, выход которого соединен с входом второго счетчика и входом первого одновибратора, соединенного своим выходом с входом первого элемента задержки и входом управления компенсацией всех блоков масштабирования, выход первого элемента задержки соединен с входом регистрации блока выбора среднего сигнала и входом управления первого ключа, вход которого соединен с выходом блока выбора среднего сигнала, вход первого, второго и n-го сигнала которого соединен соответственно с выходом первого, второго и n-го блока масштабирования, выход второго счетчика соединен с входом второго одновибратора, выход которого подключен к входу разрешения контроля всех блоков масштабирования и входу управления второго ключа, вход которого соединен с выходом масштабирующего сумматора, вход обнуления которого соединен с выходом второго элемента задержки и входом обнуления сумматора всех блоков масштабирования, выход первого ключа соединен с входом масштабирующего сумматора и входом сигнала управления всех блоков масштабирования, вход контрольного сигнала которых соединен с выходом второго ключа.
Блок масштабирования, содержащий первый, второй, третий и четвертый коммутаторы, дополнительно включает в себя регистр задания цены положительного приращения, регистр задания цены отрицательного приращения, регистр задания сигнала компенсации, сумматор, элемент ИЛИ, элемент выделения модуля, цифровой компаратор и триггер, при этом первый вход соединен с входом управления первого коммутатора, вход которого соединен с выходом с регистра задания цены положительного приращения, выход первого коммутатора соединен с первым входом сумматора, второй вход соединен с входом управления второго коммутатора, вход которого соединен с выходом регистра задания цены отрицательного приращения, выход второго коммутатора соединен с вторым входом сумматора, вход управления компенсацией соединен с входом управления третьего коммутатора, вход которого соединен с выходом регистра задания сигнала смещения, выход третьего коммутатора соединен с третьим входом сумматора, выход которого соединен с выходом блока масштабирования и входом элемента выделения модуля, выход которого соединен с входом четвертого коммутатора, выход которого соединен с шиной B цифрового компаратора, вход управления четвертого коммутатора соединен с входом разрешения контроля, вход контрольного сигнала соединен с шиной A цифрового компаратора, выход В>А которого соединен с входом S триггера, выход которого соединен с выходом неисправности и первым входом элемента ИЛИ, второй вход которого соединен с входом обнуления сумматора, выход элемента ИЛИ соединен с входом R сумматора.
Блок выбора среднего сигнала содержит n(n-1)/2 цифровых компараторов, программируемое запоминающее устройство, мультиплексор, ключ и регистр, при этом входы первого, второго и n-го сигналов соединены с соответствующими шинами A и B упомянутых цифровых компараторов и соответствующими входными шинами мультиплексора, шина управления которого соединена с выходной шиной программируемого запоминающего устройства, шина адреса которого соединена с выходами всех цифровых компараторов, выход мультиплексора соединен с входной шиной ключа, выходная шина которого соединена с входной шиной регистра, выходная шина которого является выходом устройства, вход регистрации соединен с входом управления ключа.
На фиг. 1 приведена блок-схема устройства для определения параметров пространственного положения объекта, на фиг. 2 приведена блок-схема блока масштабирования, на фиг. 3 приведена блок-схема блока выбора среднего сигнала.
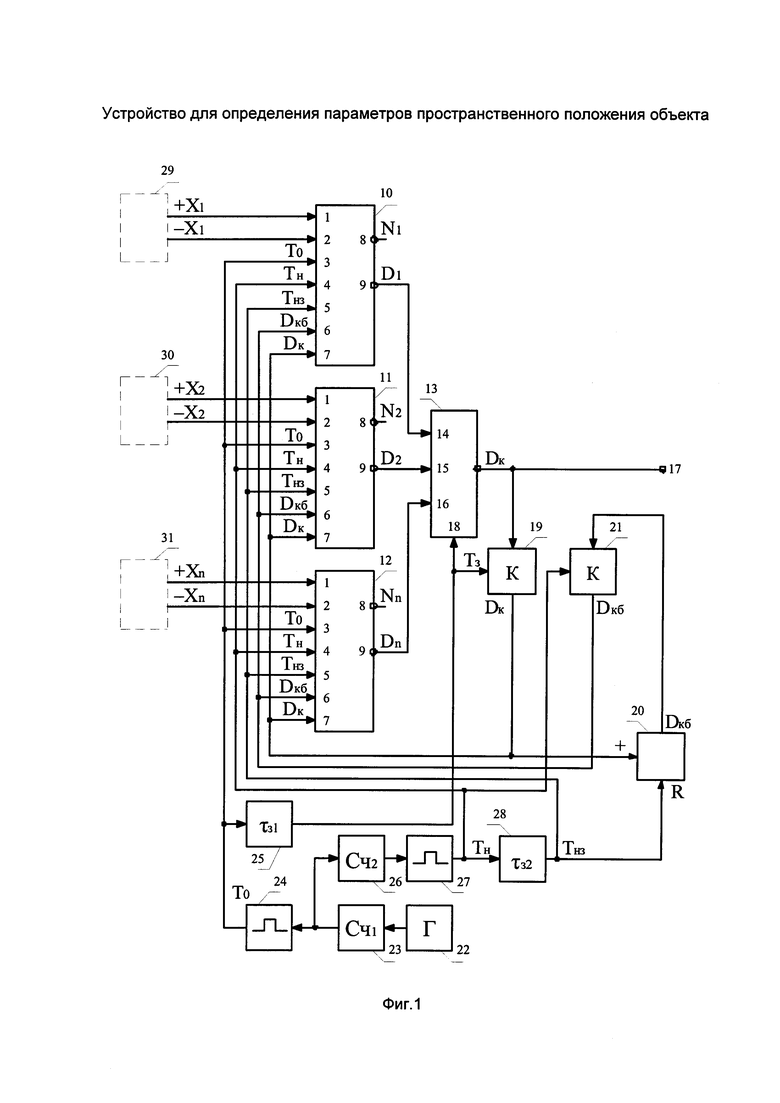
На схеме фиг. 1: 1 и 2 - соответственно первый и второй входы блока масштабирования, 3 - вход управления компенсацией, 4 - вход разрешения контроля, 5 - вход обнуления сумматора, 6 - вход контрольного сигнала, 7 - вход сигнала управления, 8 - выход неисправности измерителя, 9 - выход блока масштабирования, 10, 11 и 12 - соответственно первый, второй и n-й блоки масштабирования, 13 - блок выбора среднего сигнала, 14, 15 и 16 - соответственно вход первого, второго и n-го сигналов, 17 - выход устройства, 18 - вход регистрации, 19 - первый ключ, 20 - масштабирующий сумматор, 21 - второй ключ, 22 - генератор импульсов, 23 и 26 - соответственно первый и второй счетчики, 24 и 27 - соответственно первый и второй одновибраторы, 25 и 28 - соответственно первый и второй элементы задержки. Показаны условно: 29, 30 и 31 - первый, второй и n-й измерители.
На фиг. 1 выход генератора импульсов 22 соединен с входом первого счетчика 23, выход которого соединен с входом второго счетчика 26 и входом первого одновибратора 24, соединенного своим выходом с входом первого элемента задержки 25 и входом управления компенсацией 3 всех блоков масштабирования, выход первого элемента задержки 25 соединен с входом регистрации 18 блока выбора среднего сигнала 13 и входом управления первого ключа 19, вход которого соединен с выходом блока выбора среднего сигнала 13, являющимся выходом устройства 17, вход первого 14, второго 15 и n-го 16 сигнала которого соединен соответственно с выходом 9 первого 10, второго 11 и n-го 12 блоков масштабирования, выход второго счетчика 26 соединен с входом второго одновибратора 27, выход которого подключен к входу разрешения контроля 4 всех блоков масштабирования и входу управления второго ключа 21, вход которого соединен с выходом масштабирующего сумматора 20, вход обнуления которого соединен с выходом второго элемента задержки 28 и входом обнуления сумматора 5 всех блоков масштабирования, выход первого ключа 19 соединен с входом масштабирующего сумматора 20 и входом сигнала управления 7 всех блоков масштабирования, вход контрольного сигнала 6 которых соединен с выходом второго ключа 21.
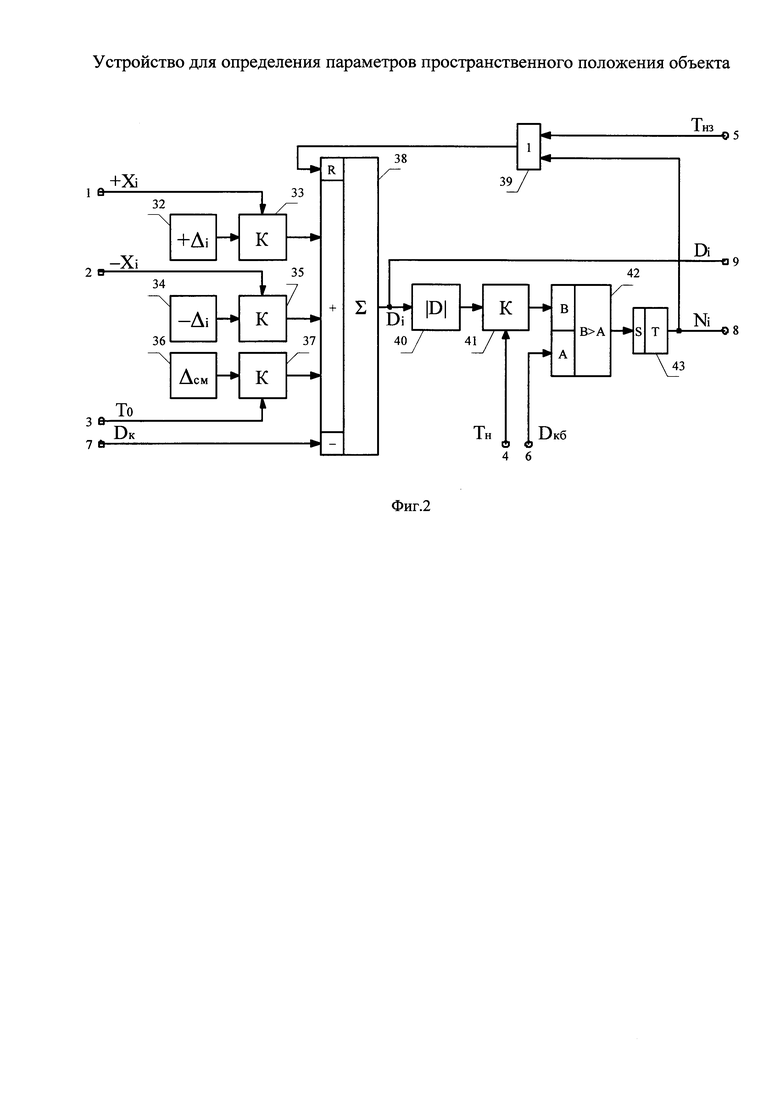
На схеме фиг. 2: 32 - регистр задания цены положительного приращения, 33, 35, 37 и 41 - соответственно первый, второй, третий и четвертый коммутаторы, 34 - регистр задания цены отрицательного приращения, 36 - регистр задания сигнала компенсации, 38 - сумматор, 39 - элемент ИЛИ, 40 - элемент выделения модуля, 42 - цифровой компаратор, 43 - триггер.
На схеме фиг. 2 первый вход 1 блока масштабирования соединен с входом управления первого коммутатора 33, вход которого соединен с выходом с регистра задания цены положительного приращения 32, выход первого коммутатора 33 соединен с первым входом сумматора 38, второй вход 2 блока масштабирования соединен с входом управления второго коммутатора 35, вход которого соединен с выходом с регистра задания цены отрицательного приращения 34, выход второго коммутатора 35 соединен с вторым входом сумматора 38, вход управления компенсацией 3 соединен с входом управления третьего коммутатора 37, вход которого соединен с выходом регистра задания сигнала компенсации 36, выход третьего коммутатора 37 соединен с третьим входом сумматора 38, выход которого соединен с выходом блока масштабирования 9 и входом элемента выделения модуля 40, выход которого соединен с входом четвертого коммутатора 41, выход которого соединен с шиной В цифрового компаратора 42, вход управления четвертого коммутатора 41 соединен с входом разрешения контроля 4, вход контрольного сигнала 6 соединен с шиной A цифрового компаратора 42, выход В>А которого соединен с входом S триггера 43, выход которого соединен с выходом неисправности измерителя 8 и первым входом элемента ИЛИ 39, второй вход которого соединен с входом обнуления сумматора 5, выход элемента ИЛИ 39 соединен с входом R сумматора 38.
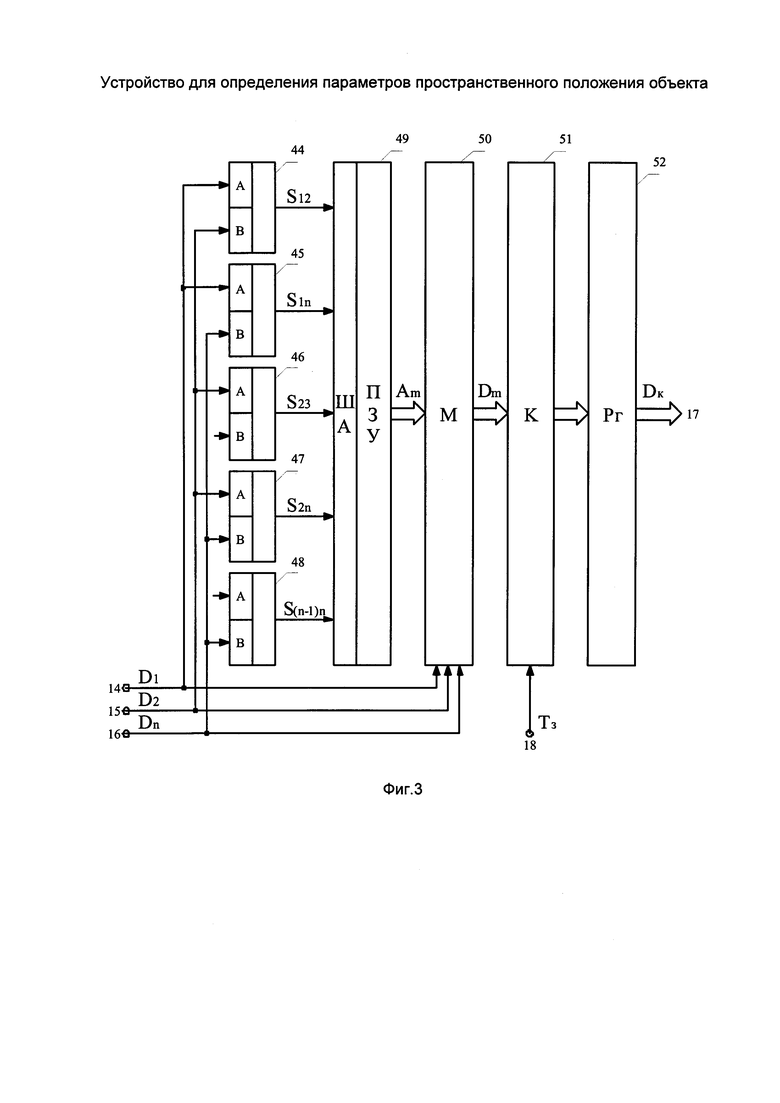
На схеме фиг. 3: 44, 45, 46, 47 и 48 - соответственно первый, второй, третий, четвертый и I-й цифровые компараторы, где I=n(n-1)/2, 49 - программируемое запоминающее устройство, 50 - мультиплексор, 51 - ключ, 52 - регистр.
На схеме фиг. 3 входы первого 14, второго 15 и n-го 16 сигналов соединены с соответствующими шинами A и B упомянутых цифровых компараторов 44, 45, 46, 47 и 48 и соответствующими входными шинами мультиплексора 50, шина управления которого соединена с выходной шиной программируемого запоминающего устройства 49, шина адреса которого соединена с выходами всех цифровых компараторов 44, 45, 46, 47 и 48, выход мультиплексора 50 соединен с входной шиной ключа 51, выходная шина которого соединена с входной шиной регистра 52, выходная шина которого является выходом устройства 17, вход регистрации 18 соединен с входом управления ключа 51.
Устройство для определения параметров пространственного положения объекта работает следующим образом. С выхода измерителей 29, 30 и 31 на первый 1 и второй 2 входы каждого блока масштабирования поступают соответственно импульсные сигналы +X1 и -X1 (первый блок масштабирования 10), +Х2 и -Х2 (второй блок масштабирования 11), +Xn и -Xn (n-й блок масштабирования 12). Измерители 29, 30 и 31 производят измерение параметров объекта управления (например, параметров угловой скорости космического аппарата). Знак «+» или «-» определяет направление вектора измеряемого параметра. Импульсные сигналы +X1 и -X1 с выхода измерителя 29 (также и с выходов других измерителей) никогда не совпадают по времени. Измерители 29, 30 и 31 характеризуются той особенностью, что их выходной сигнал имеет начальное смещение, т.е. при нулевом значении измеряемого параметра на выходе присутствует выходной импульсный сигнал +XCM или -XCM определенной частоты fCM. Кроме того, каждый выходной импульс измерителя, соответствующий приращению измеряемого параметра, может отличаться на стабильную величину от заданного значения.
Пусть входной сигнал Xi(i=1, 2, … n) определяется выражением (1)

где Y - измеряемый параметр, Mi - масштабный коэффициент, определяющий отличие фактического значения измеряемого параметра от значения выходного сигнала измерителя, YCMi - начальное смещение выходного сигнала. Считаем, что выходной сигнал измерителя представляет собой последовательность импульсов, частота следования которых fi пропорциональна алгебраической сумме измеряемого параметра Y и начального смещения YCM. При нулевом значении измеряемого параметра Y частота следования выходных импульсов fCMi пропорциональна начальному смещению измеряемого параметра YCMi.
Измеряемый параметр Y (например, угловая скорость или линейное ускорение) является векторной величиной, которая имеет знак «+» или «-». Будем предполагать, что сигнал измеряемого параметра Y знака «+» поступает на вход устройства по одной линии связи, сигнал измеряемого параметра Y знака «-» поступает на вход устройства по другой линии связи. Кроме того, будем считать, что каждый выходной импульс измерителя должен соответствовать заданному значению 9, определяемому из (2)

где Y - измеряемый параметр, YCM - начальное смещение, t - время, при котором интеграл величин (Y+YCM) (2) становится равным заданному значению Δ. В этом случае частота следования выходных импульсов fi измерителя, формируемых в моменты времени t, будет определяться выражением

Основная погрешность измеряемого параметра определяется точностью формирования величины Δ. Если Δi значение заданной величины, формируемой измерителем, то

Будем считать, что выходной сигнал Xi измерителя представляет собой последовательность импульсов с частотой следования fi (3) и ценой каждого импульса Δi (4).
В резервированных системах, содержащих n каналов, используются, как правило, и n измерителей. В таких системах информация об измеряемом параметре объекта управления должна поступать с исправно работающего измерителя. Наиболее распространенным и простым способом получения такой информации является способ мажоритарного выбора, т.е. получение сигнала с выхода мажоритарного устройства или иного устройства, реализующего указанный способ.
Пусть входные сигналы +Х1, +Х2, +Xn поступают на первые входы 1, входные сигналы -X1, -Х2, -Xn поступают на вторые входы 2 соответствующих блоков масштабирования устройства. Для наглядности примем n=3. Считаем, что в начальный момент времени все счетчики и сумматоры находятся в нулевом состоянии.
Каждый измеритель пространственного положения объекта характеризуется свойственным ему значением цены каждого импульса Δi и величиной начального смещения YCM. Эти величины носят обычно стабильный характер. Величина Δi может отличаться от заданного значения Δ на значительную величину (до 10%), начальное смещение YCM может достигать нескольких процентов от максимального значения измеряемого параметра Y Значения Δi и YCM являются известными величинами. Эти значения в виде соответствующего кода (фиг. 2) заносятся в регистр задания цены положительного приращения 32 (+Δi), регистр задания цены отрицательного приращения 34 (-Δi) и регистр задания сигнала компенсации 36 (ΔCM).
Импульсы +Xi, поступающие на первый вход 1 блока масштабирования, открывают первый коммутатор 33 (фиг. 2) и содержимое регистра задания цены положительного приращения 32 подается на вход сумматора 38, выходной сигнал которого Di изменяется на величину +Δi. При каждом поступлении импульса +Xi выходной сигнал Di сумматора 38 изменяется на величину +Δi. Импульсы -Xi, поступающие на второй вход 2 блока масштабирования, открывают второй коммутатор 35 и содержимое регистра задания цены отрицательного приращения 34 подается на вход сумматора 38, выходной сигнал которого Di изменяется на величину -Δi. При каждом поступлении импульса -Xi выходной сигнал Di сумматора 38 изменяется на величину -Δi. Сигнал Т0, поступающий с выхода первого одновибратора 24 (фиг. 1) на вход управления компенсацией 3 блока масштабирования, открывает третий коммутатор 37 (фиг. 2) и содержимое регистра задания сигнала компенсации 36 подается на вход сумматора 38, выходной сигнал которого Di изменяется на величину ΔCM.
При известных значениях величины и знака начального смещения YCM и цены импульса Δi можно определить величину ΔCM, записываемую в регистр задания сигнала компенсации 36. При заданных значениях YCM и Δi определяется частота fCM, соответствующая начальному смещению YCM при нулевом сигнале Y Если, например, начальное смещение YCM имеет положительный знак, то

Период Т0 определяется произведением коэффициента деления первого счетчика 23 и периода следования импульсов генератора 22.
При выполнении равенства (5) начальное смещение YCM измерителя будет компенсироваться сигналом с регистра задания сигнала компенсации 36, периодически подаваемым на вход сумматора 38 с периодом Т0.
Определим содержимое Di сумматора 38 в моменты времени Т0. Сигнал с выхода первого одновибратора 24 (фиг. 1) поступает на вход первого элемента задержки 25, а с его выхода на вход регистрации 18 блока выбора среднего сигнала 13 и вход управления первого ключа 19. Если в начальный момент времени сумматоры 38 всех блоков масштабирования находились в нулевом состоянии, то по истечении времени Т0 содержимое Di сумматора 38 будет определяться выражением

где fi - частота следования выходных импульсов измерителя в данный момент времени. С учетом (4) можно считать, что с точностью до стабильности исправно работающего измерителя (а это не хуже 0,1%) содержимое сумматоров 38 всех блоков масштабирования равны, т.е. D1=D2=Dn. Если, например, при измерении некоторой величины Y при заданном значении Δ частота следования выходного сигнала равна f, то при заданном значении Δi=МΔ частота следования выходных импульсов fi·=f/M. Иначе говоря, Δi·fi=Δf.
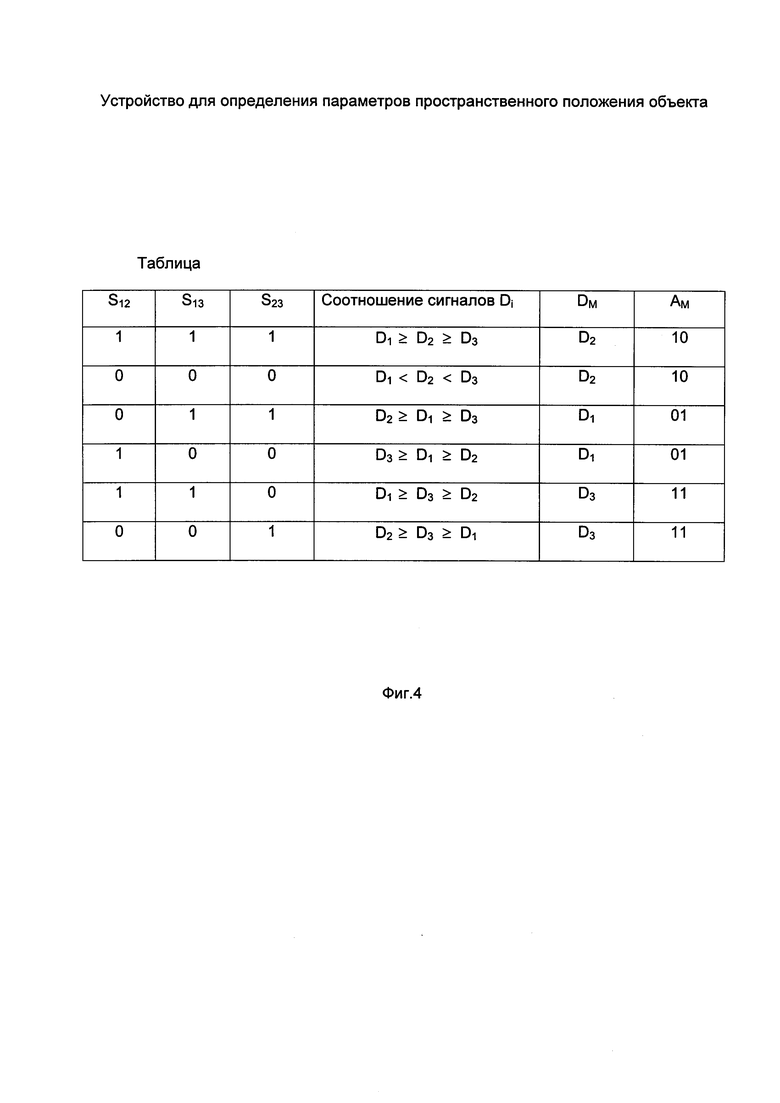
Сигналы D1, D2, Dn могут отличаться незначительно, а со временем в случае отказа какого-либо измерителя это отличие становится существенным. Рассмотрим работу устройства на примере использования трех измерителей и трех блоков масштабирования (n=3). Сигналы D1 с выхода первого блока масштабирования 10, D2 с выхода второго блока масштабирования 11 и D3 с выхода n-го блока масштабирования 12 поступают соответственно на входы 14, 15 и 16 блока выбора среднего сигнала 13 (фиг. 3). Этот блок содержит n(n-1)/2 цифровых компараторов, в рассматриваемом случае при n=3 блок содержит три цифровых компаратора. Эти компараторы сравнивают сигналы D1, D2, D3 каждый с каждым. Результат сравнения каждого цифрового компаратора обозначим S12, S13, S23. Символ S12 означает сравнение сигналов D1 и D2, причем первая цифра символа указывает также на то, что сигнал D с этой цифрой поступает на шину A соответствующего цифрового компаратора, а вторая цифра указывает на то, что сигнал D с этой цифрой поступает на шину B этого же цифрового компаратора. Аналогично и для символов S13, S23. Пусть

Сигналы S12, S13, S23 с выхода цифровых компараторов поступают на шину адреса программируемого запоминающего устройства 49, и их кодовая комбинация образует шину адреса этого запоминающего устройства. Рассмотрим формирование «среднего» сигнала DM из сигналов D1, D2, D3 на выходе мультиплексора 50. «Средним» сигналом DM будем считать, например, сигнал D2, если выполняется условие (8)

Рассмотрим возможные кодовые комбинации сигналов S12, S13, S23, являющихся шиной адреса программируемого запоминающего устройства 49, и определим при этом «средний» сигнал DM. Результаты отразим в таблице фиг. 4.
Определим содержимое AM ячеек программируемого запоминающего устройства 49, которое является шиной адреса мультиплексора 50. Мультиплексор 50 должен подключать к своему выходу DM тот из сигналов D1, D2, D3, который является «средним». Будем считать, что при кодовой комбинации шины адреса AM «01» мультиплексор 50 подключает к выходу сигнал D1, при кодовой комбинации «10» мультиплексор 50 подключает к выходу сигнал D2, при кодовой комбинации «11» мультиплексор 50 подключает к выходу сигнал D3. Таким образом, согласно таблице на выходе мультиплексора 50 формируется «средний» сигнал DM из входных сигналов D1, D2, D3.
Сигнал DM с выхода мультиплексора 50 поступает на вход 18 ключа 51, управляемого сигналом Т3 с выхода первого элемента задержки 25 (фиг.1). Сигнал T3 открывает ключ 51 и сигнал DM подается на вход регистра 52 и в нем хранится. Выходная шина регистра 52 является выходом устройства 17. Содержимое регистра 52 DK=DM на момент поступления сигнала T3 с выхода первого элемента задержки 25 определяет изменение за время Т0 сигнала того измерителя, сигнал которого соответствует «среднему» значению в соответствии с (8). Одновременно сигнал Т3 открывает первый ключ 19 (фиг. 1) и сигнал DK подается на вычитающий вход 7 сумматора 38 всех блоков масштабирования. Если из трех сигналов D1, D2 и D3 «средним» является сигнал D2, то состояние сумматоров 38 в момент поступления сигнала Т3 определяется равенствами

где Dij - состояние сумматора 38 на момент времени tj (j=1, 2, 3…), tj=j T0.
Если в качестве измеряемого параметра рассматривается угловая скорость вращения космического аппарата, то в соответствии с (2) и (6) сигнал DK представляет собой изменение углового положения космического аппарата за время Т0, при этом сигнал DK является «средним» (и достоверным) сигналом из D1, D2 и D3. Этот сигнал используется для определения пространственного положения осей аппарата относительно выбранного базиса путем решения кинематических уравнений [3]. Сигнал DK остается достоверным и при отказе любого измерителя.
Если в устройстве используются более 3-х измерителей, то на шину А первых (n-1) цифровых компараторов подается первый сигнал D1, на шину В этих же цифровых компараторов подаются соответственно второй D2, третий D3 и n-й Dn сигналы, на шину A следующих (n-2) цифровых компараторов подается второй сигнал D2, на шину B этих же цифровых компараторов подаются соответственно третий D3, четвертый D4 и n-й Dn сигналы и т.д. На шину A последнего цифрового компаратора подается (n-1)-й сигнал D(n-1), на шину B этого цифрового компаратора подается n-й сигнал Dn. Выходные сигналы цифровых компараторов S12, S13, … S(n-1)n образуют шину адреса программируемого запоминающего устройства 49, выходной сигнал которого в соответствии с ранее приведенной таблицей формирует адрес для мультиплексора 50, что однозначно позволяет определить «средний» выходной сигнал DK.
Рассмотрим работу устройства в случае отказа одного из измерителей. При исправной работе всех измерителей выходные сигналы D1j, D2j и D3j будут отличаться друг от друга незначительно. Текущие значения этих сигналов определяются (9) и, если, например, при измерении параметра Y в течение длительного времени будет выполняться соотношение

то в соответствии с (9) содержимое сумматора 38 D1j первого блока масштабирования 10 будет постоянно возрастать, содержимое сумматора 38 D2j второго блока масштабирования 11 будет близко к нулю, содержимое сумматора 38 D3j третьего блока масштабирования 12 будет постоянно уменьшаться. За заданное время TH при исправной работе измерителей разность сигналов D1j, D2j и D3j не должна превышать некоторого заданного значения DKδ. Это значение можно определить в виде

где δ - коэффициент, ΔK и fK - соответственно «цена» импульса и частота импульсов измерителя «среднего» сигнала.
Допустимое значение коэффициента δ составляет (0,01-0,05) и заранее известно. Выходной сигнал устройства DK в каждые моменты времени Т0 подается на вход масштабирующего сумматора 20 с выхода первого ключа 19, открываемого выходным сигналом первого элемента задержки 25. Масштабирующий сумматор 20 производит суммирование сигналов DK с умножением на коэффициент δ. В результате суммирования в течение времени TH выходной сигнал DKδ масштабирующего сумматора 20 определяется выражением (11). В моменты времени TH (интервал времени формируется последовательно включенными первым 23 и вторым 26 счетчиками) сигнал с выхода второго одновибратора 27 открывает второй ключ 21 и сигнал DKδ с выхода масштабирующего усилителя 20 подается на вход контрольного сигала 6 всех блоков масштабирования. Этот сигнал поступает на шину A цифрового компаратора 42 (фиг. 3), на шину B которого в этот же момент времени подается сигнал с выхода элемента выделения модуля 40 через замкнутый четвертый коммутатор 41, управляемый выходным сигналом TH второго одновибратора 27.
Если, например, отказал первый измеритель 29, то за время TH содержимое сумматора 38 D1 первого блока масштабирования 10 превысит значение DKδ и цифровой компаратор 42 сформирует сигнал В>А, который поступит на вход S триггера 43 и установит его в единичное состояние. На выходе 8 первого блока масштабирования 10 формируется сигнал неисправности N1, который поступает на вход элемента ИЛИ 39 и далее на вход R сумматора 38, удерживая его в нулевом состоянии, блокируя тем самым поступление сигналов с отказавшего измерителя 29. По истечении времени задержки τ32 выходной сигнал второго элемента задержки 28 поступает на вход R масштабирующего сумматора 20 и вход обнуления сумматора 5 всех блоков масштабирования (на вход элемента ИЛИ 39 и с его выхода на вход R сумматора 38).
Таким образом, при исправной работе всех измерителей в моменты времени T0 производится компенсация начального смещения YCMi выходного сигала каждого измерителя, с задержкой τ31 первого элемента задержки 25 производится установка в регистр 52 выходного сигнала устройства DK, соответствующего изменению углового положения объекта за время Т0. В моменты времени TH производится контроль исправности каждого измерителя и при фиксации отказа формируется сигнал неисправности Ni и блокировка сигнала отказавшего измерителя. Сигнал DK соответствует выходному сигналу того измерителя, сигнал которого является «средним» в соответствии с (10). Использование этого сигнала позволяет достоверно определить пространственное положение объекта даже в случае отказа измерителя без потери информации.
Погрешность определения пространственного положения объекта зависит от точности измеренного сигнала DK. Известное устройство [2] предполагает использование n(n>3) не ортогонально расположенных измерителей. Масштабирующий блок известного устройства позволяет при использовании заданной конфигурации из четырех измерителей для каждого измерителя выбрать из своей памяти значения направляющих косинусов оси чувствительности относительно исходного базиса. При этом учет масштабного коэффициента и начального смещения выходного сигнала измерителя не предусматривается.
Оценим погрешность известного [2] и предлагаемого решений. Оценку погрешности будем производить по отношению фактического значения измеряемого параметра Y (D) к измеренной величине этого параметра Yi (DK). В соответствии с (2) заданное значение Δ представляет собой приращение угла поворота объекта. Предположим, что объект вращается с постоянной угловой скоростью Y0. За время Т0 объект повернется на угол D

где f0 - частота следования выходных импульсов измерителя при угловой скорости Y0. Измеренная известным устройством эта величина DK1 будет равна

где М - масштабный коэффициент измерителя, fCM - частота следования выходных импульсов измерителя из-за начального смещения нулевого сигнала.
Относительную погрешность определения пространственного положения объекта δ11 известного устройства можно определить в виде

Погрешность определения пространственного положения объекта зависит также от погрешности фактического расположения оси чувствительности измерителя относительно исходного базиса. Если угловое положение оси чувствительности измерителя относительно исходного базиса известно с точностью Δα, то относительная дополнительная погрешность определения пространственного положения объекта δ12 будет равна 
Суммарная относительная погрешность δ1 известного устройства будет равна

Оценим относительную погрешность предлагаемого устройства. Измеренная предлагаемым устройством величина DK2 будет равна
где ΔK - цена импульса измерителя со «средней» частотой выходного сигнала, fK -частота выходного сигнала. Относительная погрешность δ21 предлагаемого устройства будет равна

В предлагаемом устройстве оси чувствительности измерителей совпадают с осями исходного базиса. Относительная дополнительная погрешность определения пространственного положения объекта δ22 вследствие погрешности расположения оси чувствительности измерителя относительно исходного базиса будет равна

Суммарная относительная погрешность δ2 предлагаемого устройства будет равна

Пусть Δ=3 угл. с, Y=1 0/с, f0=1200 Гц, М=1,1, YCM=0,05 0/с, fCM=80 Гц, α=600, Δα=0,50, ΔK=3,3 угл. с, fK=1090 Гц. В этом случае δ11=0,167, δ12=0,008, δ21=0,001, δ22=0,00004, δ1=0,175 или 17,5%, δ2=0,00104 или 0,104%.
Как следует из приведенного анализа, относительная погрешность δ2 предлагаемого устройства для определения параметров пространственного положения объекта значительно меньше погрешности δ1 известного устройства [2].
Предлагаемая совокупность признаков в рассмотренных авторами решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям "новизна" и "изобретательский уровень". В качестве элементов для реализации устройства можно использовать стандартные сумматоры, цифровые компараторы, элементы задержки, логические микросхемы, коммутаторы, регистры, одновибраторы, генераторы, ключи, счетчики импульсов, элементы выделения модуля.
Литература
1. Авторское свидетельство СССР №613291, кл. G05B 15/02, G05D 1/02. Устройство для управления пространственным положением объекта, от 30.06.1975.
2. Патент РФ №2179736, кл. G05D 1/08, G05B 15/02, от 20.02.2002. Устройство для определения параметров пространственного положения объекта.
3. В.Н. Бранец, И.П. Шмыглевский. Введение в теорию бесплатформенных инерциальных навигационных систем. М., «Наука», 1992, с. 107-127.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации информации | 1985 |
|
SU1304170A1 |
| Устройство для моделирования воспроизводства продукта в экономических системах | 1987 |
|
SU1430974A1 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1979 |
|
SU1840138A1 |
| Устройство для автоматического контроля параметров интегральных схем | 1988 |
|
SU1649474A1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ЛОКАЛЬНЫХ ПОРЯДКОВЫХ СТАТИСТИК | 1990 |
|
RU2024934C1 |
| Цифровой феррозондовый измеритель азимута | 1987 |
|
SU1498913A1 |
| АДАПТИВНОЕ ЦИФРОВОЕ СГЛАЖИВАЮЩЕЕ И ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2622852C1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
| Устройство компенсации влияния эксцентриситета прокатных валков | 1980 |
|
SU908455A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ НАПРЯЖЕНИЯ ПЕРЕМЕННОГО ТОКА В КОД | 2001 |
|
RU2195767C1 |
Изобретение относится к области автоматического управления и может быть использовано при построении высоконадежных резервированных устройств и систем, содержащих измерители с числоимпульсным выходом (датчики угловой скорости, акселерометры и т.д.), где наряду с достижением высокой надежности требуется достижение высокой точности. Технический результат заключается в повышении точности измеряемого параметра, в качестве которого используется «средний» сигнал измерителя из группы n измерителей с числоимпульсным выходом. Для достижения этого результата заявляемое устройство содержит блок выбора среднего сигнала и n блоков масштабирования, каждый из которых содержит регистры задания цены положительного и отрицательного приращения, регистр задания сигнала компенсации, сумматор, цифровой компаратор и триггер, которые производят компенсацию различного значения цены выходного импульса каждого датчика и его начального смещения, что обеспечивает повышение точности. При выходе из строя измерителя устройство фиксирует отказ и продолжает работу без потери информации. 2 з.п. ф-лы, 4 ил.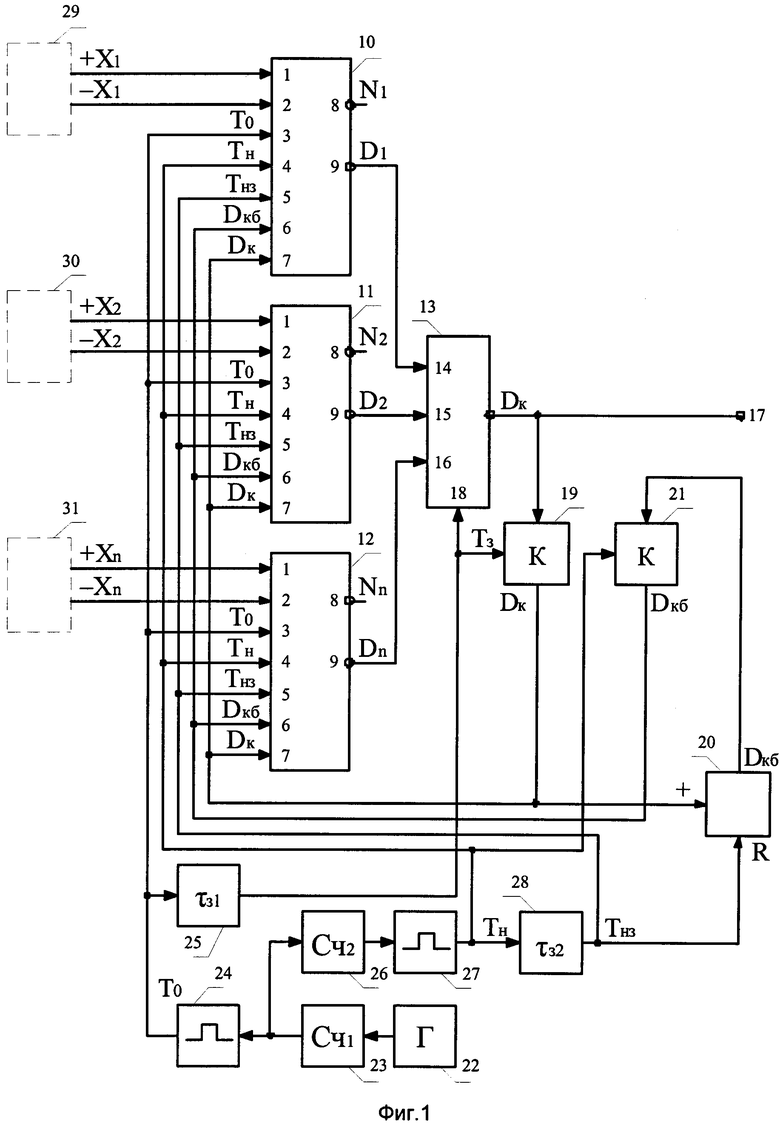
1. Устройство для определения параметров пространственного положения объекта, содержащее масштабирующий сумматор, первый счетчик и n масштабирующих блоков, отличающееся тем, что в него дополнительно введены блок выбора среднего сигнала, первый и второй ключи, второй счетчик, первый и второй одновибраторы, первый и второй элементы задержки и генератор импульсов, выход которого соединен с входом первого счетчика, выход которого соединен с входом второго счетчика и входом первого одновибратора, соединенного своим выходом с входом первого элемента задержки и входом управления компенсацией всех блоков масштабирования, выход первого элемента задержки соединен с входом регистрации блока выбора среднего сигнала и входом управления первого ключа, вход которого соединен с выходом блока выбора среднего сигнала, вход первого, второго и n-го сигнала которого соединен соответственно с выходом первого, второго и n-го блока масштабирования, выход второго счетчика соединен с входом второго одновибратора, выход которого подключен к входу разрешения контроля всех блоков масштабирования и входу управления второго ключа, вход которого соединен с выходом масштабирующего сумматора, вход обнуления которого соединен с выходом второго элемента задержки и входом обнуления сумматора всех блоков масштабирования, выход первого ключа соединен с входом масштабирующего сумматора и входом сигнала управления всех блоков масштабирования, вход контрольного сигнала которых соединен с выходом второго ключа.
2. Устройство для определения параметров пространственного положения объекта по п. 1, отличающееся тем, что блок масштабирования, содержащий первый, второй, третий и четвертый коммутаторы, дополнительно включает в себя регистр задания цены положительного приращения, регистр задания цены отрицательного приращения, регистр задания сигнала компенсации, сумматор, элемент ИЛИ, элемент выделения модуля, цифровой компаратор и триггер, при этом первый вход соединен с входом управления первого коммутатора, вход которого соединен с выходом регистра задания цены положительного приращения, выход первого коммутатора соединен с первым входом сумматора, второй вход соединен с входом управления второго коммутатора, вход которого соединен с выходом регистра задания цены отрицательного приращения, выход второго коммутатора соединен с вторым входом сумматора, вход управления компенсацией соединен с входом управления третьего коммутатора, вход которого соединен с выходом регистра задания сигнала смещения, выход третьего коммутатора соединен с третьим входом сумматора, выход которого соединен с выходом блока масштабирования и входом элемента выделения модуля, выход которого соединен с входом четвертого коммутатора, выход которого соединен с шиной В цифрового компаратора, вход управления четвертого коммутатора соединен с входом разрешения контроля, вход контрольного сигнала соединен с шиной А цифрового компаратора, выход В>А которого соединен с входом S триггера, выход которого соединен с выходом неисправности и первым входом элемента ИЛИ, второй вход которого соединен с входом обнуления сумматора, выход элемента ИЛИ соединен с входом R сумматора.
3. Устройство для определения параметров пространственного положения объекта по п. 1, отличающееся тем, что блок выбора среднего сигнала содержит n(n-1)/2 цифровых компараторов, программируемое запоминающее устройство, мультиплексор, ключ и регистр, при этом входы первого, второго и n-го сигналов соединены с соответствующими шинами А и В упомянутых цифровых компараторов и соответствующими входными шинами мультиплексора, шина управления которого соединена с выходной шиной программируемого запоминающего устройства, шина адреса которого соединена с выходами всех цифровых компараторов, выход мультиплексора соединен с входной шиной ключа, выходная шина которого соединена с входной шиной регистра, выходная шина которого является выходом устройства, вход регистрации соединен с входом управления ключа.
| Устройство для измерения параметров импульсных сигналов | 1987 |
|
SU1499278A1 |
| Устройство для программного управления положением объекта | 1984 |
|
SU1193642A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2000 |
|
RU2179736C2 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

