Предлагаемое изобретение относится к способам управления уборкой механизации крыла (закрылков и предкрылков) при взлете, повышающим безопасность полета самолетов транспортной категории посредством защиты закрылков и предкрылков от чрезмерных аэродинамических нагрузок за счет автоматизации системы управления механизацией.
Известен способ управления механизацией крыла, при котором уборку закрылков и предкрылков при разгоне самолета осуществляют в зависимости от коэффициента подъемной силы горизонтального полета. При этом на этапе взлета самолета уборку механизации осуществляют так, чтобы при каждой текущей конфигурации самолета, то есть при каждой текущей паре значений углов отклонения закрылков δз и предкрылков δпр достигалось максимальное аэродинамическое качество (В.К. Святодух, Ю.Ф. Шелюхин. «Проблемы безопасности полета самолетов гражданской авиации», статья в сборнике работ «Современные проблемы динамики и управления летательных аппаратов», Труды ЦАГИ, выпуск 2649, г.Жуковский, 2001 г., стр.18-19).
При таком способе управления уборкой механизации реализуются энергетически более выгодные траектории разгона самолета, однако вопросы нагружения механизации при этом не рассматриваются.
Наиболее близким аналогом - прототипом является способ управления уборкой механизации крыла самолета транспортной категории, реализуемый в автоматизированной системе управления механизацией крыла (АСУМК), интегрированной в комплексную систему управления (КСУ) самолета, при котором в процессе разгона после взлета измеряют текущие значения δз тек и δпр тек, активируют хранящуюся в бортовом вычислителе зависимость максимально допустимой скорости полета от углов отклонения закрылков и предкрылков VFE(δз, δпр), определяют величину максимально допустимой скорости полета, соответствующую текущей комбинации углов отклонения закрылков и предкрылков VFE(δз тек, δпр тек) и соответствующую ей скорость начала автоматического кабрирования самолета Vкарб(δз, δпр)<VFE(δз, δпр), в каждый момент времени полета измеряют воздушную скорость самолета VEAS, проводят сравнение величины измеренной скорости VEAS с величиной скорости Vкарб(δз, δпр), при увеличении скорости VEAS до значения Vкабр(δз, δпр) формируют в системе управления рулем высоты сигнал на кабрирование самолета с целью снижения темпа разгона, в процессе кабрирования сравнивают величину измеренной скорости VEAS с величиной максимально допустимой скорости полета VFE(δз тек, δпр тек), при увеличении скорости VEAS до значения VFE(δз тек, δпр тек) осуществляют автоматическую уборку механизации (см. патент РФ №2364548, МПК B64C 13/16 «Система управления летательным аппаратом»).
Такой способ управления уборкой механизации крыла (закрылков и предкрылков) имеет два крупных недостатка. Во-первых, при снижении темпа набора скорости, которое обусловлено кабрированием самолета, увеличивается время достижения рекомендуемой в Руководстве по летной эксплуатации (РЛЭ) скорости полета по маршруту. Во-вторых, и это более существенно, скорость начала автоматической уборки механизации Vнау(δз, δпр) устанавливается равной максимально допустимой скорости полета с выпущенной механизацией VFE(δз, δпр). При таком выборе скорости Vнау(δз, δпр) не может быть гарантировано непревышение границы VFE(δз, δпр): начало уборки механизации при VEAS=VFE(δз, δпр) в случае интенсивного разгона самолета может оказаться запоздалым, так как из-за ограниченных угловых скоростей уборки закрылки и предкрылки не будут успевать за быстро увеличивающейся скоростью полета.
Техническим результатом предлагаемого изобретения является обеспечение надежной защиты границы максимально допустимых скоростей полета самолета с выпущенной механизацией VFE(δз, δпр). Гарантированное непревышение границы VFE(δз, δпр) позволит защитить механизацию крыла от чрезмерных аэродинамических нагрузок. Это особенно важно в тех случаях, когда в соответствии с п.25.335(e)(3) Авиационных правил, часть 25 (АП-25) в качестве расчетных скоростей полета с выпущенной механизацией приняты величины VF(δз, δпр), меньшие рекомендованных в п.25.335(e)(2), а величины VFE(δз, δпр) максимально приближены к расчетным значениям VFE(δз, δпр).
Поставленный технический результат достигается тем, что в способе управления уборкой механизации крыла самолета транспортной категории, заключающемся в том, что в процессе разгона самолета на высоте начала уборки механизации измеряют текущие значения углов отклонения закрылков δз тек и предкрылков δпр тек, активируют хранящуюся в бортовом вычислителе зависимость максимально допустимой скорости полета от углов отклонения закрылков и предкрылков VFE(δз, δпр), определяют скорость начала уборки механизации, равную величине скорости VFE(δз тек, δпр тек), в каждый момент времени полета измеряют воздушную скорость самолета VEAS, проводят сравнение текущего значения скорости полета VEAS с величиной скорости VFE(δз тек, δпр тек), при увеличении скорости VEAS до значения VFE(δз тек, δпр тек) осуществляют автоматическую уборку механизации, дополнительно устанавливают максимально допустимую скорость начала ручной уборки механизации Vнpy, максимально допустимую скорость начала автоматической уборки механизации Vнау как функции полетного веса самолета G и углов отклонения закрылков и предкрылков, меньшие скорости VFE(δз, δпр), то есть Vнру(G, δз, δпр)<Vнау(G, δз, δпр)<VFE(δз, δпр), а также расчетные зависимости максимально и минимально допустимых скоростей полета от полетного веса самолета и углов отклонения закрылков и предкрылков Vmax(G, δз, δпр) и Vmin(G, δз, δпр), реализуемые при последовательной уборке механизации из взлетного положения в крейсерское, которые определяют предварительно при математическом моделировании траекторий взлета и размещают в бортовом вычислителе, в полете измеряют текущее значение полетного веса самолета Gтек, активируют хранящиеся в бортовом вычислителе зависимости максимально и минимально допустимых скоростей начала уборки механизации Vmax(G, δз, δпр) и Vmin(G, δз, δпр), определяют величины этих скоростей, соответствующие текущим значениям параметров G, δз, δпр, то есть Vmax тек=Vmax(Gтек, δз тек, δпр тек) и Vmin тек=Vmin(Gтек, δз тек, δпр тек), задают летчику на шкале командно-пилотажного прибора диапазон скоростей безопасной уборки механизации посредством индикации на ней значений скоростей Vmax(Gтек, δз тек, δпр тек) и Vmin(Gтек, δз тек, δпр тек), индицируют на шкале командно-пилотажного прибора границу максимально допустимых скоростей полета с выпущенной механизацией VFE(δз тек, δпр тек), при нахождении скорости VEAS внутри диапазона скоростей безопасной уборки механизации посредством перемещения рычага управления механизацией в положение, соответствующее крейсерской конфигурации самолета, осуществляют уборку механизации, в процессе уборки механизации контролируют и обеспечивают нахождение текущего значения скорости VEAS внутри диапазона скоростей безопасной уборки механизации за счет управления вертикальной скоростью набора высоты Vy, увеличивая ее при приближении скорости VEAS к границе Vmax и уменьшая при приближении к границе Vmin, при невмешательстве летчика в управление механизацией активируют хранящуюся в бортовом вычислителе зависимость максимально допустимой скорости начала ручной уборки механизации Vнру от полетного веса самолета и углов отклонения закрылков и предкрылков, определяют текущее значение скорости Vнру тек=Vнру(Gтек, δз тек, δпр тек), проводят сравнение скорости VEAS с величиной скорости Vнру тек, при выполнении условия VEAS≥Vнру тек летчику формируют команду о необходимости начать уборку механизации, при продолжающемся невмешательстве летчика в управление механизацией определяют текущее значение скорости начала автоматической уборки Vнру тек=Vmax(Gтек, δз тек, δпр тек), проводят сравнение скорости VEAS со скоростью Vнау тек, при выполнении условия VEAS≥Vнау тек осуществляют автоматическую уборку механизации.
Поставленный технический результат достигается также тем, что в указанном выше способе управления уборкой механизации крыла самолета транспортной категории с целью расширения диапазона скоростей полета, рекомендуемых в РЛЭ для уборки механизации, максимально допустимые скорости начала ручной и начала автоматической уборки механизации устанавливают дополнительно и как функции ускорения центра масс самолета вдоль траектории полета 
 и
и  , дополнительно определяют и размещают в памяти бортового вычислителя величины скоростей полета
, дополнительно определяют и размещают в памяти бортового вычислителя величины скоростей полета  , наблюдавшиеся при математическом моделировании процессов уборки механизации при постановке закрылков в положение
, наблюдавшиеся при математическом моделировании процессов уборки механизации при постановке закрылков в положение 

 - на этапе разгона до начала уборки механизации;
- на этапе разгона до начала уборки механизации;
 - на этапе уборки закрылков при δпр=δпр взл; Vmax=min(Vmax 1, Vmax 2),
- на этапе уборки закрылков при δпр=δпр взл; Vmax=min(Vmax 1, Vmax 2),
где  ,
,  - на этапе совместной уборки закрылков и предкрылков; Vmax=Vmax 2 - на этапе уборки предкрылков при δз=0.
- на этапе совместной уборки закрылков и предкрылков; Vmax=Vmax 2 - на этапе уборки предкрылков при δз=0.
Перечень фигур:
- фиг.1 - блок-схема, реализующая предлагаемый способ управления уборкой механизации;
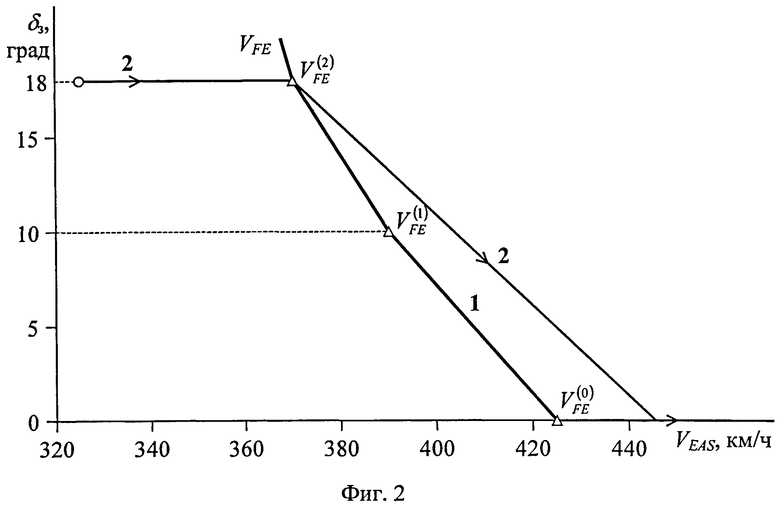
- фиг.2 - уборка закрылков при использовании способа-прототипа;
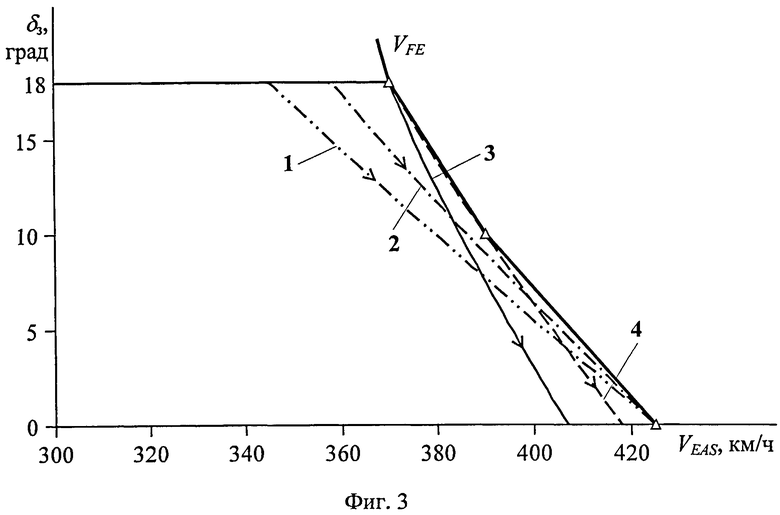
- фиг.3 - уборка закрылков по предлагаемому способу с упреждением.
На фиг.1 показана блок-схема, реализующая предложенный способ управления уборкой механизации крыла с упреждением. На блок-схеме обозначено:
1 - датчики углов отклонения закрылков и предкрылков;
2 - система воздушных сигналов (СВС), формирующая данные о воздушных параметрах движения самолета;
3 - система измерения массы и центровки (СИМЦ);
4 - бесплатформенная инерциальная навигационная система (БИНС);
5 - бортовой вычислитель;
6 - командно-пилотажный прибор (КПП), шкала скорости;
7 - летчик;
8 - рычаг управления механизацией;
9 - рычаг продольного управления самолетом;
10 - рулевой привод закрылков;
11 - рулевой привод предкрылков;
12 - вычислитель системы автоматического управления уборкой механизации;
13 - блок автоматического управления уборкой механизации;
14 - блок управления приводом закрылков;
I - кабина экипажа;
VEAS - скорость полета самолета;
δз, δпр - углы отклонения закрылков и предкрылков;
G - полетный вес самолета;
VFE(δз, δпр) - максимально допустимая скорость при выпущенной механизации;
Vнру - максимально допустимая скорость начала ручной уборки механизации;
Vнау - максимально допустимая скорость начала автоматической уборки механизации;
Vmin - минимально допустимая скорость начала уборки механизации, являющаяся заданной функцией G, δз, δпр.
Надежную защиту границы максимально допустимых скоростей полета с выпущенной механизацией можно обеспечить, если осуществлять упреждающую уборку механизации, то есть начинать уборку механизации не после, а до достижения скоростью VEAS значения VFE(δз, δпр). Скорости полета VEAS, соответствующие началу упреждающей уборки механизации, могут быть определены заранее методами математического моделирования траекторий взлета и размещены в бортовом вычислителе самолета.
При математическом моделировании траекторий взлета используются следующие математические модели:
- модель динамики продольного движения самолета, учитывающая зависимость аэродинамических коэффициентов Cха, Cуа и mz от углов отклонения закрылков и предкрылков;
- модель продольного канала комплексной системы управления, обеспечивающая регулирование передаточных чисел автоматики на взлетно-посадочных режимах полета;
- модель АСУМК, учитывающая ограничения угловых скоростей уборки закрылков  и предкрылков
и предкрылков  , а также принятую последовательность уборки закрылков и предкрылков.
, а также принятую последовательность уборки закрылков и предкрылков.
Ниже принимается, что сначала осуществляется уборка закрылков, а когда их угол отклонения уменьшается до величины 
В отличие от прототипа, в котором скорость начала автоматической уборки механизации Vнау(δз, δпр)установлена равной скорости VFE(δз, δпр), в предлагаемом способе эту скорость устанавливают меньшей скорости VFE(δз, δпр). Поэтому задача математического моделирования заключается в том, чтобы определить такой запас от скорости Vнау(δз, δпр) до скорости VFE(δз, δпр)и такое управление самолетом в процессе уборки механизации, чтобы, с одной стороны, обеспечивалось непревышение границы максимальных скоростей VFE(δз, δпр), а с другой - обеспечивался максимальный разгон самолета, необходимый для скорейшего достижения скорости полета по маршруту. Очевидно, что этот запас должен зависеть от полетного веса самолета, тяги двигательной установки и угла наклона траектории, определяющих темп разгона самолета. При заданном полетном весе самолета G и заданной зависимости тяги от скорости полета P(V) скорость начала уборки механизации можно определить по следующей процедуре (для конкретности рассматривается уборка механизации из промежуточного взлетного положения, 

1. На основании расчетов траекторий разгона самолета в прямолинейном горизонтальном полете на высоте начала уборки механизации при ее уборке из промежуточного взлетного положения в крейсерское, соответствующих различным значениям скорости начала уборки механизации, определяют то максимальное значение 
2. На основании расчетов траекторий разгона самолета при уборке механизации из взлетного положения в промежуточное взлетное при различных значениях скорости начала уборки закрылков при δпр=δпр взл=const, определяют то значение Vнау з, при котором в момент уборки закрылков в положение 
3. Проводят аналогичные расчеты для других заданных значений G и P(V).
В зависимости от объема используемой информации о параметрах полета (кроме данных о δз, δпр и скоростях VEAS и VFE (δз, δпр)) скорость Vнау[δз, δпр) определяют следующим образом:
1. Используют информацию только о полетном весе самолета. Для каждого полетного веса принимают наименьшую величину скорости начала уборки механизации, соответствующая наибольшей для данного полетного веса тяге при максимальном продолжительном режиме работы двигательной установки. Для гарантированного начала уборки механизации на этой скорости она должна осуществляться автоматически, во избежание неблагоприятного влияния человеческого фактора. Для каждого полетного веса самолета устанавливают также скорость начала ручной уборки механизации Vнру(G). Скорости начала ручной уборки механизации Vнру при рассматриваемом способе выбора скоростей Vнау определяют при математическом моделировании траекторий взлета по формуле 

Для обеспечения гарантированного непревышения границы максимальных скоростей VFE(δз, δпр) в полете в процессе уборки механизации осуществляют контроль соответствия текущего и расчетного значений скорости полета. С этой целью для каждого фиксированного значения полетного веса самолета в бортовом вычислителе размещают ряд расчетных значений скорости полета, которые наблюдали в разные моменты времени при различных комбинациях углов δз и δпр при математическом моделировании процесса автоматической уборки механизации. Пример зависимости расчетной скорости полета от δз и δпр при максимальном взлетном весе самолета, обозначенной Vmax, приведен в таблице 3.
Для каждого полетного веса самолета устанавливают также границу минимально допустимых скоростей полета при уборке механизации Vmin, которую определяют расчетом в зависимости от скорости сваливания: например, Vmin=k·Vs, 
В полете летчик может начать уборку механизации при любом значении скорости из диапазона Vmin(δз взл, δпр взл)≤VEAS<Vнау. Однако только при приближении скорости VEAS к значению Vнру ему формируют команду о необходимости начать уборку механизации. В процессе ручной уборки механизации задача летчика заключается в том, чтобы удерживать текущее значение скорости VEAS в диапазоне Vmin(δз тек, δпр тек)≤VEAS<Vmax(δз тек, δпр тек). С этой целью диапазон скоростей полета, соответствующих безопасной уборке механизации, индицируют на шкале КПП. В качестве верхней границы этого диапазона используют скорость Vmax, в качестве нижней границы - скорость Vmin. При этом пилотирование самолета при ручном управлении уборкой механизации заключается в удержании скорости VEAS в границах диапазона скоростей безопасной уборки механизации за счет управления вертикальной скоростью набора высоты: значение Vy при приближении к границе Vmax увеличивать, при приближении к границе Vmin - уменьшать.
2. Используют информацию о полетном весе самолета и об ускорении центра масс самолета вдоль траектории
 ,
,  , i=1…n. Величины
, i=1…n. Величины
 . Максимально допустимую скорость начала ручной уборки
. Максимально допустимую скорость начала ручной уборки  определяют после определения скорости
определяют после определения скорости  по методике, описанной выше в п.1. При математическом моделировании автоматической уборки механизации определяют также величину скорости
по методике, описанной выше в п.1. При математическом моделировании автоматической уборки механизации определяют также величину скорости 




Скорости  и
и
При использовании информации о
 . Исходя из требования, что скорость
. Исходя из требования, что скорость 
 , определяют максимально допустимую скорость полета на этапе уборки закрылков в положение
, определяют максимально допустимую скорость полета на этапе уборки закрылков в положение 
 . При совместной уборке закрылков и предкрылков, то есть при
. При совместной уборке закрылков и предкрылков, то есть при 
 , и пролонгированное значение скорости Vз.прол 2(δз=0), которое она имела бы при полной уборке закрылков из положения
, и пролонгированное значение скорости Vз.прол 2(δз=0), которое она имела бы при полной уборке закрылков из положения 
 .
.
Исходя из требований, что скорость Vз.прол 2(δз=0) не должна быть больше скорости VFE(δз=0), а скорость Vпр.прол не должна быть больше скорости VFE(δпр=0), определяют два значения максимально допустимой скорости  и
и  , и для этапа совместной уборки закрылков и предкрылков в качестве максимально допустимой скорости выбирают величину Vmax=min(Vmax 1, Vmax 2). Для этапа уборки предкрылков при δз=0 в качестве максимально допустимой скорости принимают величину Vmax=Vmax 2.
, и для этапа совместной уборки закрылков и предкрылков в качестве максимально допустимой скорости выбирают величину Vmax=min(Vmax 1, Vmax 2). Для этапа уборки предкрылков при δз=0 в качестве максимально допустимой скорости принимают величину Vmax=Vmax 2.
Так же, как и при отсутствии информации об ускорении
В случае, когда информация об ускорении центра масс самолета вдоль траектории
- Измеряют текущие значения углов отклонения закрылков δз тек и предкрылков δпр тек (выходы блока 1).
- Активируют хранящуюся в бортовом вычислителе зависимость максимально допустимой скорости полета от углов отклонения закрылков и предкрылков VFE(δз, δпр), определяют текущее значение максимально допустимой скорости полета с выпущенной механизацией VFE тек=VFE(δз тек, δпр тек), (блок 5, таблица 1).
- На шкале скорости КПП (блок 6) индицируют максимально допустимую скорость полета с выпущенной механизацией, равную VFE тек.
- Измеряют текущее значение полетного веса самолета Gтек (выход блока 3).
- Активируют хранящуюся в блоке 5 зависимость максимально допустимой скорости начала уборки механизации Vmax от полетного веса самолета и углов отклонения закрылков и предкрылков (таблица 3).
- Определяют и индицируют на шкале скорости КПП (блок 6) величину скорости Vmax как верхнюю границу диапазона скоростей безопасной уборки механизации.
- Активируют хранящуюся в блоке 5 зависимость минимально допустимой скорости начала уборки механизации Vmin от параметров G, δз, δпр (таблица 4).
- Определяют и индицируют на шкале скорости КПП (блок 6) величину скорости Vmin как нижнюю границу диапазона скоростей безопасной уборки механизации.
- Измеряют текущее значение скорости полета VEAS (выход блока 2).
- По шкале скорости КПП (блок 6) контролируют нахождение скорости в диапазоне скоростей безопасной уборки. Уборка механизации может быть начата при любой скорости из диапазона Vmin≤VEAS≤Vmax.
- Посредством перемещения рычага управления механизацией (блок 8) в положение, соответствующее крейсерскому положению закрылков и предкрылков, осуществляют уборку механизации.
- В процессе уборки механизации удерживают значение скорости VEAS в диапазоне скоростей безопасной уборки: вертикальную скорость набора высоты Vy при приближении к границе Vmax увеличивают, а при приближении к границе Vmin - уменьшают.
- При невмешательстве летчика в управление механизацией активируют хранящуюся в блоке 5 зависимость максимально допустимой скорости начала ручной уборки механизации Vнру от полетного веса самолета и углов отклонения закрылков и предкрылков Vнру(G, δз, δпр) (таблица 2) и определяют текущее значение скорости Vнру.
- Проводят сравнение скорости VEAS со скоростью Vнру.
- При выполнении условия VEAS≥Vнру формируют летчику команду о необходимости начать уборку механизации (блок 7).
- При продолжающемся невмешательстве летчика в управление механизацией определяют текущее значение скорости начала автоматической уборки Vнау тек как значение скорости Vmax(G, δз взл, δпр взл) (таблица 3), проводят сравнение скорости VEAS со скоростью Vнау тек (блок 12).
- При выполнении условия VEAS≥Vнау тек осуществляют автоматическую уборку механизации (блок 13).
При использовании информации об ускорении центра масс самолета вдоль траектории полета
 и
и  и, кроме того, возникает необходимость в знании максимально допустимой скорости начала уборки механизации из промежуточного взлетного положения в крейсерское
и, кроме того, возникает необходимость в знании максимально допустимой скорости начала уборки механизации из промежуточного взлетного положения в крейсерское  (таблица 5) и в дополнительном определении скорости Vmax, являющейся верхней границей индицируемого на КПП диапазона скоростей безопасной уборки механизации. При этом в полете измеряют текущее значение ускорения
(таблица 5) и в дополнительном определении скорости Vmax, являющейся верхней границей индицируемого на КПП диапазона скоростей безопасной уборки механизации. При этом в полете измеряют текущее значение ускорения  (выход блока 4), а величину Vmax определяют в блоке 5 по следующим зависимостям:
(выход блока 4), а величину Vmax определяют в блоке 5 по следующим зависимостям:  - на этапе разгона до начала уборки механизации;
- на этапе разгона до начала уборки механизации;  - на этапе уборки закрылков при δпр=δпр взл; Vmax=min(Vmax 1, Vmax 2), где
,
, на этапе совместной уборки закрылков и предкрылков; Vmax=Vmax 2 - на этапе уборки предкрылков при δз=0.
- на этапе уборки закрылков при δпр=δпр взл; Vmax=min(Vmax 1, Vmax 2), где
,
, на этапе совместной уборки закрылков и предкрылков; Vmax=Vmax 2 - на этапе уборки предкрылков при δз=0.
На фиг.2 на плоскости (VEAS, δз) приведены граница максимально допустимых скоростей полета самолета с выпущенными закрылками VFE(δз) (линия 1) и диаграмма изменения угла отклонения закрылков в функции скорости полета δз(VEAS) при их уборке из взлетного положения в крейсерское по методу прототипа (линия 2); при этом G=56000 кг. Зависимость δз(VEAS) получена методами математического моделирования динамики взлета самолета, оборудованного автоматизированной системой управления механизацией крыла (АСУМК). Математическая модель АСУМК учитывала ограничение угловой скорости отклонения закрылков при их уборке  . На фиг.2 видно, что в случае, когда уборка механизации начинается по достижении границы VFE (способ управления уборкой по прототипу), из-за ограниченной угловой скорости уборки закрылков максимально допустимая скорость полета с выпущенными закрылками VFE(δз) была значительно превышена, что недопустимо по условиям безопасности полета.
. На фиг.2 видно, что в случае, когда уборка механизации начинается по достижении границы VFE (способ управления уборкой по прототипу), из-за ограниченной угловой скорости уборки закрылков максимально допустимая скорость полета с выпущенными закрылками VFE(δз) была значительно превышена, что недопустимо по условиям безопасности полета.
На фиг.3 показаны четыре различных диаграммы изменения угла отклонения закрылков в функции скорости полета при их упреждающей уборке из взлетного положения в крейсерское, полученные методами математического моделирования траекторий взлета самолета с использованием математической модели АСУМК, учитывающей такое же ограничение величины  , как в случае диаграммы δз(VEAS) на фиг.2. Рассматривались два значения полетного веса самолета и для каждого полетного веса два значения стартовой тяги, обеспечивающие разные значения ускорения центра масс самолета вдоль траектории
, как в случае диаграммы δз(VEAS) на фиг.2. Рассматривались два значения полетного веса самолета и для каждого полетного веса два значения стартовой тяги, обеспечивающие разные значения ускорения центра масс самолета вдоль траектории
- линия 1: G=56000 кг; Vнау=345 км/ч; Vу=0; 
- линия 2: G=56000 кг; Vнау=357 км/ч; Vу=2 м/с; 
- линия 3: G=77300 кг; Vнау=370 км/ч; Vу=2 м/с; 
- линия 4: G=77300 кг; Vнау=370 км/ч; Vу=0; 
Рассматривался наиболее интенсивный разгон самолета в горизонтальной плоскости. Все четыре диаграммы являются предельными в том смысле, что в каждой из них используется максимально допустимое (предельное) значение скорости начала уборки механизации, при котором еще обеспечивается непревышение назначенных скоростей VFE(δз, δпр). На фиг.3 видно, что предельные значения скоростей упреждающей уборки можно представить в виде функций ускорения центра масс вдоль траектории
Технический результат заключается в том, что при гарантированном непревышении назначенных величин VFE[δз, δпр) расчетные скорости полета самолета с выпущенной механизацией VF[δз, δпр) в соответствии с п.25.335(e)(3) АП-25 могут быть понижены по сравнению со значениями VF[δз, δпр), определяемыми в п.25.335(e)(2) АП-25. При этом снижаются расчетные аэродинамические нагрузки на механизацию (закрылки и предкрылки), что позволяет снизить вес конструкции крыла. Например, уменьшение расчетных скоростей полета с выпущенной механизацией VF[δз, δпр) на 7÷10% снижает аэродинамические нагрузки на механизацию на 15÷20%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления самолётом в режиме системы автоматического управления "Уход на второй круг" | 2022 |
|
RU2792904C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| Способ управления рулём высоты самолёта | 2017 |
|
RU2681509C1 |
| КРЫЛО САМОЛЕТА | 1998 |
|
RU2148526C1 |
| Баллистический маятник с переменным весом | 2019 |
|
RU2699756C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| Самолет местных воздушных линий | 2023 |
|
RU2812162C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА ТОПЛИВА САМОЛЕТА | 2008 |
|
RU2377507C1 |
Изобретение относится к авиации, в частности к способам управления механизацией крыла при взлете, повышающим безопасность полета самолетов транспортной категории посредством защиты закрылков и предкрылков от чрезмерных аэродинамических нагрузок. Для управления уборкой механизации крыла самолета транспортной категории сначала измеряют текущие значения скорости полета, полетного веса самолета, углы отклонения закрылков и предкрылков, а при необходимости также и ускорение центра масс самолета вдоль траектории, определяют скорости начала ручной и автоматической уборки с упреждением относительно максимально допустимой скорости полета самолета с выпущенной механизацией. Проводят индикацию текущего значения скорости начала ручной уборки механизации на пилотажном приборе, формируют сообщения для летчика о необходимости начать уборку механизации и обеспечивают ее автоматическую уборку при невмешательстве летчика в управление. Достигается снижение расчетной скорости полета с выпущенной механизацией, в результате чего уменьшаются расчетные аэродинамические нагрузки на механизацию (закрылки и предкрылки), а следовательно, и вес конструкции крыла, в результате чего повышается надежность и безопасность полетов. 1 з.п. ф-лы, 3 ил., 5 табл.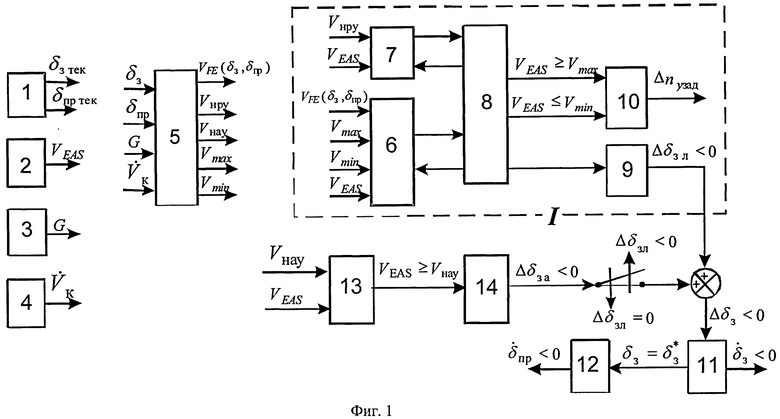
1. Способ управления уборкой механизации крыла самолета транспортной категории, заключающийся в том, что в процессе разгона самолета на высоте начала уборки механизации измеряют текущие значения углов отклонения закрылков δз.тек и предкрылков δпр.тек, активируют хранящуюся в бортовом вычислителе зависимость максимально допустимой скорости полета от углов отклонения закрылков и предкрылков VFE(δз, δпр), определяют скорость начала уборки механизации, равную величине скорости VFE(δз.тек, δпр.тек), в каждый момент времени полета измеряют воздушную скорость самолета VEAS, проводят сравнение текущего значения скорости полета VEAS с величиной скорости VFE(δз.тек, δпр.тек), при увеличении скорости VEAS до значения VFE(δз.тек, δпр.тек) осуществляют автоматическую уборку механизации, отличающийся тем, что дополнительно устанавливают максимально допустимую скорость начала ручной уборки механизации Vнру, максимально допустимую скорость начала автоматической уборки механизации Vнау как функции полетного веса самолета G и углов отклонения закрылков и предкрылков, меньшие скорости VFE(δз, δпр), то есть Vнpy(G, δз, δпр)<Vнау(G, δз, δпр)<VFE(δз, δпр), а также расчетные зависимости максимально и минимально допустимых скоростей полета от полетного веса самолета и углов отклонения закрылков и предкрылков Vmax(G, δз, δпр) и Vmin(G, δз, δпр), реализуемые при последовательной уборке механизации из взлетного положения в крейсерское, которые определяют предварительно при математическом моделировании траекторий взлета и размещают в бортовом вычислителе, в полете измеряют текущее значение полетного веса самолета Gтек, активируют хранящиеся в бортовом вычислителе зависимости максимально и минимально допустимых скоростей начала уборки механизации Vmax(G, δз, δпр) и Vmin(G, δз, δпр), определяют величины этих скоростей, соответствующие текущим значениям параметров G, δз, δпр, то есть Vmax тек=Vmax(Gтек, δз.тек, δпр.тек) и Vmin тек=Vmin(Gтек, δз.тек, δпр.тек), задают летчику на шкале командно-пилотажного прибора диапазон скоростей безопасной уборки механизации посредством индикации на ней значений скоростей Vmax(Gтек, δз.тек, δпр.тек) и Vmin(Gтек, δз.тек, δпр.тек), индицируют на шкале командно-пилотажного прибора границу максимально допустимых скоростей полета с выпущенной механизацией VFE(δз.тек, δпр.тек), при нахождении скорости VEAS внутри диапазона скоростей безопасной уборки механизации посредством перемещения рычага управления механизацией в положение, соответствующее крейсерской конфигурации самолета, осуществляют уборку механизации, в процессе уборки механизации контролируют и обеспечивают нахождение текущего значения скорости VEAS внутри диапазона скоростей безопасной уборки механизации за счет управления вертикальной скоростью набора высоты Vy, увеличивая ее при приближении скорости VEAS к границе Vmax и уменьшая при приближении к границе Vmin, при невмешательстве летчика в управление механизацией активируют хранящуюся в бортовом вычислителе зависимость максимально допустимой скорости начала ручной уборки механизации Vнру от полетного веса самолета и углов отклонения закрылков и предкрылков, определяют текущее значение скорости Vнру.тек=Vнру(Gтек, δз.тек, δпр. тек), проводят сравнение скорости VEAS с величиной скорости Vнру.тек, при выполнении условия VEAS≥Vнау.тек летчику формируют команду о необходимости начать уборку механизации, при продолжающемся невмешательстве летчика в управление механизацией определяют текущее значение скорости начала автоматической уборки Vнау. тек=Vmax(Gтек, δз. тек, δпр.тек), проводят сравнение скорости VEAS со скоростью Vнау. тек, при выполнении условия VEAS≥Vнау.тек осуществляют автоматическую уборку механизации.
2. Способ управления уборкой механизации крыла самолета транспортной категории по п.1, отличающийся тем, что, с целью расширения диапазона скоростей полета, рекомендуемых в Руководстве по летной эксплуатации для уборки механизации, максимально допустимые скорости начала ручной и начала автоматической уборки механизации устанавливают дополнительно и как функции ускорения центра масс самолета вдоль траектории полета 









| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| Система управления уборкой механизации крыла летательного аппарата | 1991 |
|
SU1797585A3 |
| RU 1820595 C, 20.01.1996 | |||
| Способ получения 1,3,6-нафталинтрисульфокислоты | 1936 |
|
SU50689A1 |
| US 7455264 B2, 25.11.2008. | |||

