Изобретение относится к области авиации и может быть использовано в работе пилотажно-навигационного оборудования летательных аппаратов.
Актуальной задачей летной эксплуатации воздушных судов (ВС) является повышение эффективности, регулярности полетов магистральных самолетов и на этой основе расширение области ожидаемых условий эксплуатации при сохранении или повышении уровня безопасности полетов. Повышение уровня безопасности полетов и эффективности эксплуатации при выполнении режима «Уход на второй круг» возможно за счет минимизации влияния «человеческого фактора» и использовании преимуществ адаптивного управления. Это может быть достигнуто путем решения задачи по формированию комплексных управляющих воздействий, направленных на адаптивную коррекцию траектории и скорости полета с учетом запаса полной энергии самолета.
Известен способ управления самолетом в режиме ухода на второй круг, включающий увеличение скорости самолета путем перемещения рычагов управления двигателями с максимальной скоростью в положение, соответствующее наибольшей тяге, одновременно увеличение угла тангажа самолета путем подачи управляющего сигнала на руль высоты, сравнение текущего значения угла тангажа самолета с заданным и стабилизацию заданного угла тангажа, начиная с момента равенства текущего значения угла тангажа заданному, а также сравнение текущей скорости полета с заданной. При этом, с целью повышения безопасности полета самолета повышенной тяговооруженности без изменения его посадочной конфигурации при уходе на второй круг, дополнительно при достижении текущим значением скорости заданного уменьшают ускорение самолета, для чего перемещают рычаги управления двигателями с помощью управляющего сигнала, пропорционального текущему значению продольного ускорения, анализируют значение текущего ускорения, начиная с момента равенства нулю которого осуществляют стабилизацию текущего значения скорости полета путем воздействия на тягу двигателей (авторское свидетельство СССР №1125918).
Недостатком известного решения является то, что значительное увеличение тяги двигателей приводит к их ускоренному износу, повышению расхода топлива, увеличению риска отказа двигателей. При этом управление самолетом при проведении способа осуществляется в ручном управлении, что ведет за собой повышение нагрузки на экипаж.
Задачей, на решение которой направлен заявляемый способ управления самолетом, является разработка способа управления самолетом при уходе на второй круг с пониженной тягой двигателей.
Заявляемый способ управления основан на реализации возможности изменения эффективности управляющего сигнала системы автоматического управления (САУ).
Поставленная задача решается путем использования способа управления самолетом в режиме САУ «Уход на второй круг», в котором заданная приборная скорость формируется с учетом максимально допустимой скорости полета (VFE) для текущего положения закрылков и предкрылков с линейной интерполяцией между узловыми точками с учетом запаса на понижение скорости, определяемое функцией защиты диапазона (ФЗД) скоростных параметров:
Vпр.зад.=VFE(δз/δпр)-15 км/ч,
где: 15 км/ч - запас для ФЗД,
при этом при включении режима САУ «Уход на второй круг» включают автомат тяги, в канале тяги сразу подключают режим стабилизации заданной на пульте управления САУ приборной скорости, соответствующей полету с убранной механизацией крыла, который в зависимости от условий полета управляет рычагами управления двигателями (РУД) так, чтобы совместно с траекторным управлением в продольном канале обеспечить желаемый набор высоты с нормированными градиентами набора высоты и разгоном до скоростей уборки механизации.
Указанный способ позволяет автоматизировать процесс управления в режиме «уход на второй круг», чем повысить безопасность отработки режима, исключив при его осуществлении человеческий фактор. Особенности реализуемой при осуществлении способа автоматического управления тягой двигателей позволяет снизить энергозатраты на осуществление режима, понизить износ двигателей самолета за счет понижения необходимой для осуществления режима тяги двигателей.
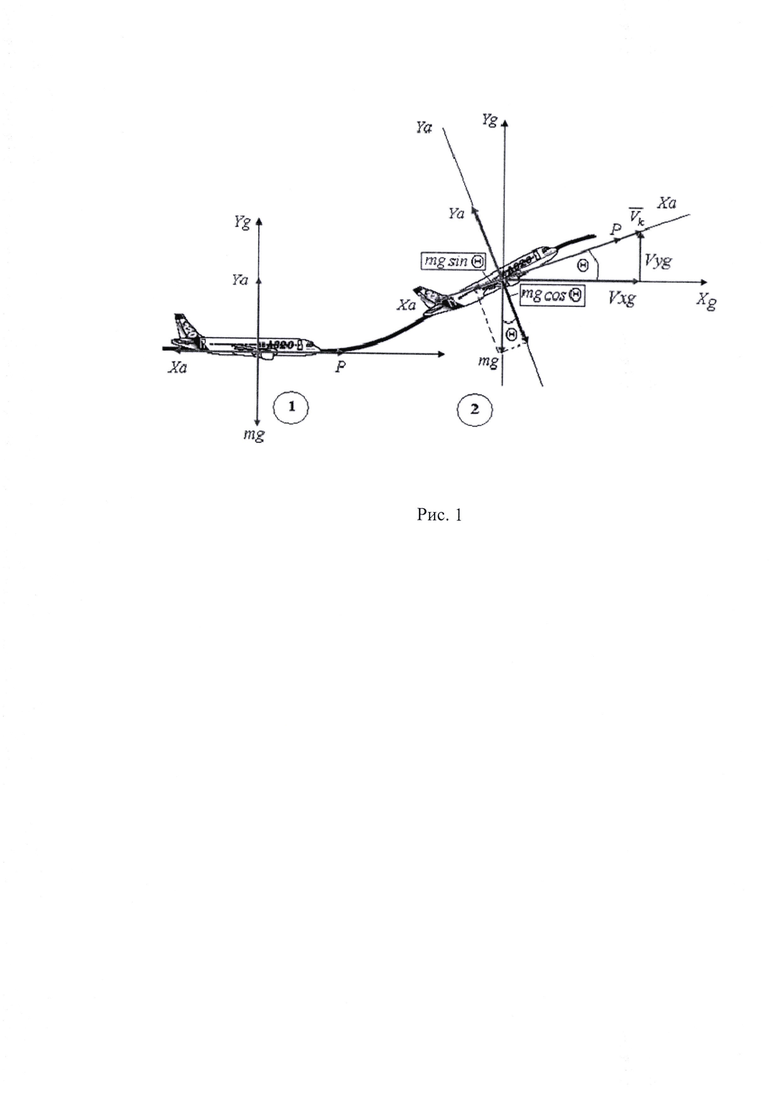
На рис. 1 представлена схема сил, действующих на самолет в режиме горизонтального полета и режиме неустановившегося по скорости набора высоты.
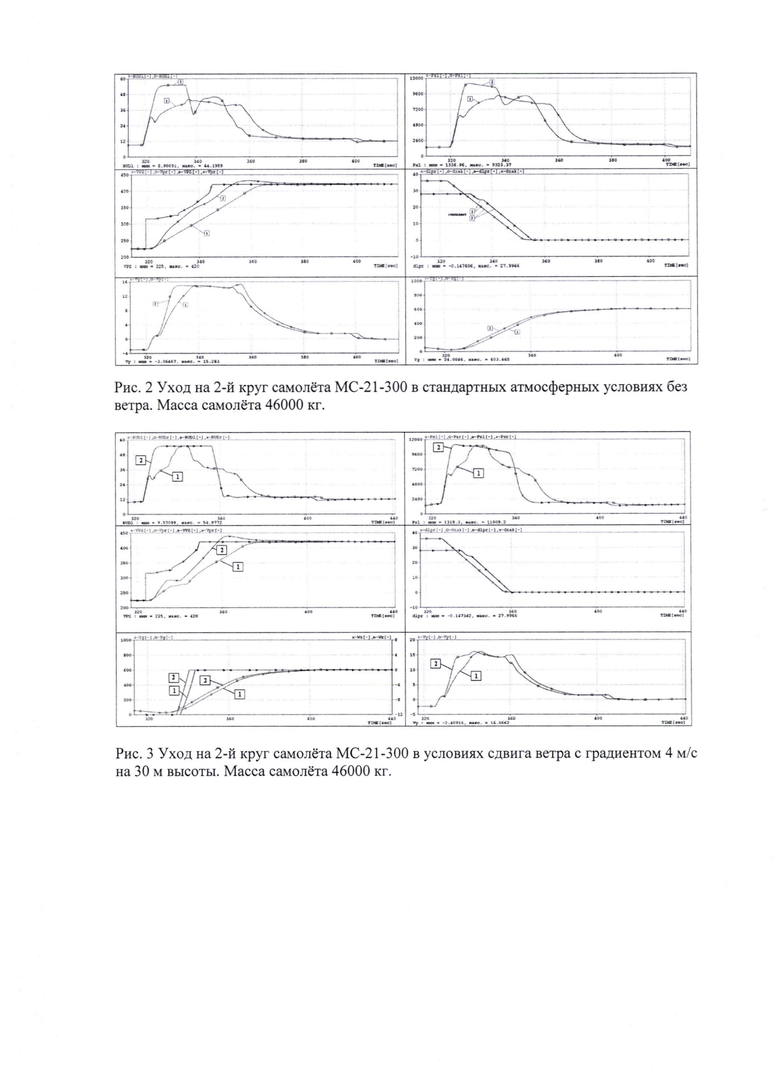
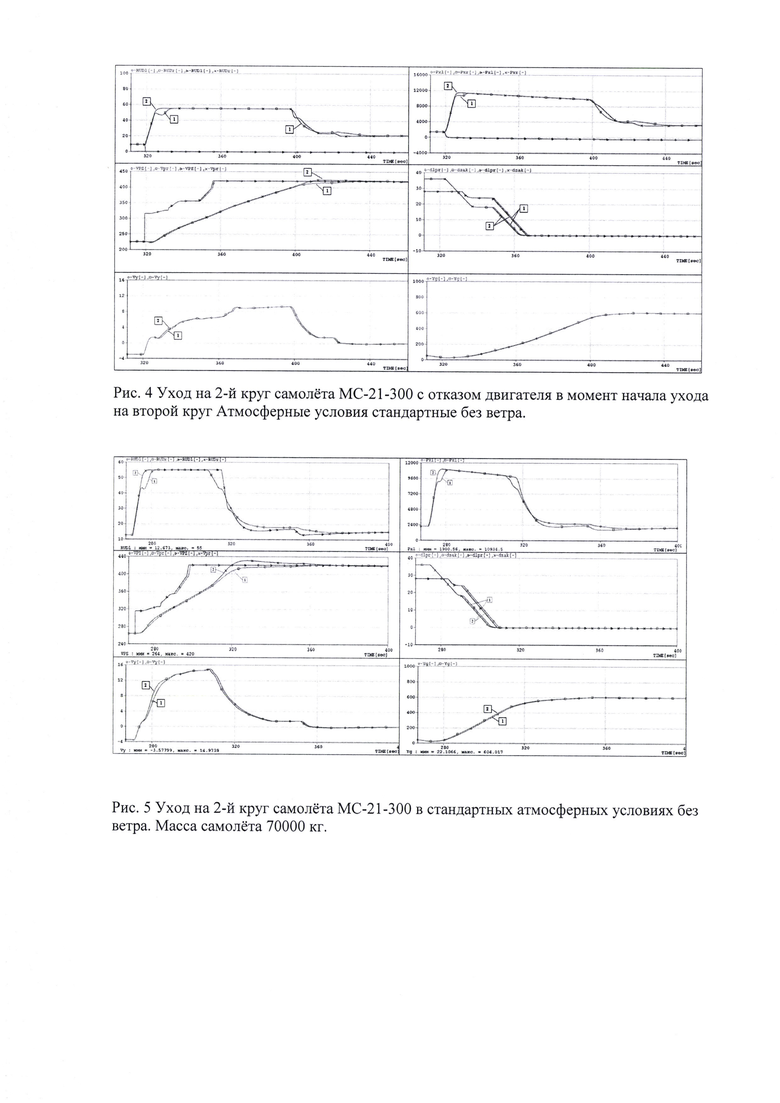
На рис. 2-4 приведены результаты математического моделирования ухода на второй круг для вариантов легкого самолета (вес самолета 46000 кг).
На рис. 5-7 приведены результаты математического моделирования для вариантов тяжелого самолета (веса самолета 70000 кг).
Все параметры движения на рисунках приведены в сравнении двух способов управления тягой двигателей. (1) по заявляемому изобретению и (2) по прототипу. Способ по прототипу моделировался так же при условии работы САУ с алгоритмами управления, раскрытыми в авторском свидетельстве СССР №1125918.
На рис. 1 показана схема сил, действующих на самолет в режиме горизонтального полета (поз. 1) и режиме неустановившегося по скорости набора высоты (поз. 2).
В общем случае при неустановившемся по скорости криволинейном наборе высоты или снижении изменяется полная энергия самолета. Выражение для полной энергии самолета можно записать в следующем виде
 .
.
Из выражения (1) видно, что запас энергии самолета определяется балансом высоты и скорости полета. Из условия сохранения полной энергии при неизменной массе самолета, при наборе высоты создаются условия способствующие уменьшению скорости полета пропорционально увеличению положительного градиента набора высоты (кинетическая энергия преобразуется в потенциальную), а при снижении - увеличение отрицательного градиента снижения способствует разгону самолета и, как следствие, увеличению кинетической энергии и соответствующем уменьшении потенциальной энергии.
Продольное движение самолета определяется балансом сил:
- в вертикальной плоскости - это подъемная сила самолета Ya и сила тяжести mg;
- в горизонтальной плоскости - это суммарная сила тяги двигателей Р и сила лобового сопротивления самолета Ха.
Очевидно, что для горизонтального прямолинейного полета с постоянной скоростью (см. рис. 1, поз. 1) режим полета будет определяться следующими равенствами:

В этом случае суммарная энергия самолета не изменяется. Для искривления траектории (изменения потенциальной энергии) необходимо нарушить равенство подъемной силы и силы тяжести, а для разгона или торможения (изменения кинетической энергии) необходимо нарушить равенство силы тяги двигателей и силы лобового сопротивления самолета. В общем случае, уравнения криволинейного, неустановившегося по скорости движения самолета в вертикальной плоскости можно записать в следующем виде (для простоты представления будем полагать, что ветер отсутствует):
Из выражений (3) видно, что для изменения скорости полета (см. рис. 1, поз. 2) требуется изменение тяги двигателей Р и/или изменение угла наклона траектории Θ при неизменной массе m и силе лобового сопротивления самолета Ха. Дополнительную возможность управлять скоростью полета дает изменение силы лобового сопротивления самолета или управление этой силой. Очевидно, что скорость изменения полной энергии самолета будет определяться избытком мощности V⋅(P-Xa)
Избыток тяги P-Ха определяет величину угла наклона траектории и величину вертикальной скорости самолета. Из выражений (3) имеем

Учитывая, что  , из выражения (5) имеем
, из выражения (5) имеем

Из выражений (5) и (6) получим выражения для потенциального угла наклона траектории и потенциальной вертикальной скорости
Очевидно, что при наборе высоты существует ограничение по максимальной величине потенциального угла наклона траектории Θmax и потенциальной вертикальной скорости 
В выражениях (9) и (10) избыточная тяга Ризб.=Р-Ха, избыточная мощность Nизб.=V⋅Ризб.
Наиболее крутой набор высоты возможен при максимальном избытке тяги при полете без ускорения на практически минимальной скорости полета.
Набор высоты с максимальной вертикальной скоростью возможен на режиме максимальной избыточной мощности.
Энергетический подход в решении задачи ухода на второй круг можно реализовать путем векторного управления в канале руля высоты, направленного на стабилизацию заданной величины потенциальной вертикальной скорости с различными способами управления тягой двигателей.
На режиме САУ «Уход на второй круг» заданная приборная скорость формируется с учетом максимально допустимой скорости полета (VFE) для текущего положения закрылков и предкрылков (с линейной интерполяцией между узловыми точками) с учетом отступа (запаса на понижение скорости), определяемое функцией защиты диапазона (ФЗД) скоростных параметров:

где: 15 км/ч - запас для ФЗД.
В процессе набора высоты круга на руль высоты формируется сигнал для выдерживания заданного значения потенциальной вертикальной скорости, скорректированной реакцией на темп изменения приборной скорости  :
:

В формуле (12) коэффициент  определяет соотношение между заданной вертикальной скоростью и заданным темпом увеличения приборной скорости.
определяет соотношение между заданной вертикальной скоростью и заданным темпом увеличения приборной скорости.
При приближении к заданной на пульте управления САУ высоте круга в канале руля высоты выполняется переход к фазе «выполаживание» (плавный выход на заданную высоту) с последующей стабилизацией заданной высоты круга.
При этом при включении режима САУ «Уход на второй круг» включают автомат тяги, в канале тяги сразу подключают режим стабилизации заданной на пульте управления САУ приборной скорости, соответствующей полету с убранной механизацией крыла, при этом автомат тяги в зависимости от условий полета управляет рычагами управления двигателями (РУД) так, чтобы совместно с траекторным управлением в продольном канале обеспечить желаемый набор высоты с нормированными градиентами набора высоты и разгоном до скоростей уборки механизации. При этом РУД-ы не обязательно переводятся во взлетное положение и формируются более комфортные условия по управлению механизацией крыла.
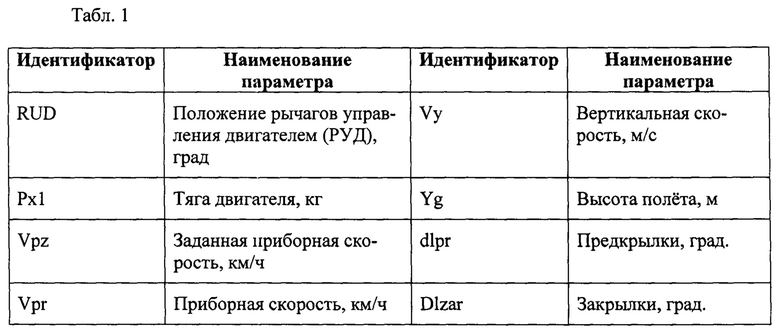
Результаты математического моделирования приведены на рис. 2-7. В табл. 1 приведены обозначения, приведенные на рис. 3-7.
Из приведенных результатов сравнения видно, что способ по изобретению (1) имеет преимущества при выполнении ухода на второй круг при увеличении располагаемого запаса энергии самолета (запас энергии увеличивается при уменьшении массы самолета и увеличении располагаемой тяги двигателей).
Из рис. 3 видно, что для ухода на второй круг не требуется увеличения режима работы двигателей до взлетного. По мере набора высоты круга РУД-ы перемещаются в положение близкое к номинальному режиму работы двигателей с равномерным увеличением приборной скорости. Градиент увеличения приборной скорости определяется заложенной в алгоритмах автомата тяги величины реакции на изменение приборной скорости  и качеством стабилизации Vy зад. рулем высоты. По сравнению со способом по прототипу (2), менее энергичное увеличение приборной скорости в способе (1) предоставляет экипажу более комфортные условия для своевременной уборки закрылков и принятия решений. Вертикальная скорость при реализации способа (2) увеличивается менее интенсивно, чем в способе (1), что обусловлено реализацией адаптивного управления тягой двигателей с оптимальным расходом запаса полной энергии самолета в процессе набора высоты круга.
и качеством стабилизации Vy зад. рулем высоты. По сравнению со способом по прототипу (2), менее энергичное увеличение приборной скорости в способе (1) предоставляет экипажу более комфортные условия для своевременной уборки закрылков и принятия решений. Вертикальная скорость при реализации способа (2) увеличивается менее интенсивно, чем в способе (1), что обусловлено реализацией адаптивного управления тягой двигателей с оптимальным расходом запаса полной энергии самолета в процессе набора высоты круга.
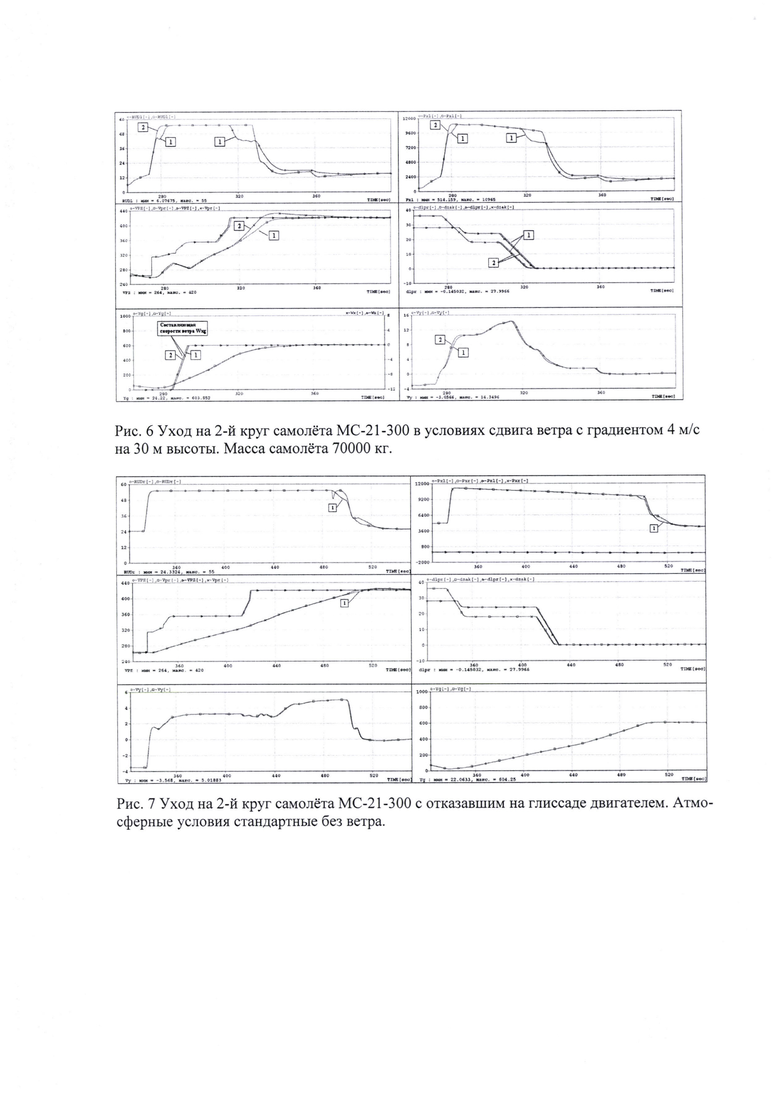
На рис. 4 приведены результаты ухода на второй круг в условиях сдвига ветра. Результаты показывают преимущества способа по изобретению (1) по сравнению со способом по прототипу (2) с позиций оптимизации использования полной энергии самолета в условиях изменения ветрового режима в канале тяги и руля высоты. При использовании способа (2) практически на протяжении всего участка набора высоты круга РУД-ы находились в положении взлетного режима работы двигателей. При использовании способа (1) РУД-ы «подстраивались» под условия изменения ветрового режима.
При усложнении условий полета условием «отказ двигателя» разница между способом управления (1) и способом управления (2) сводится к минимуму, что видно на примере (см. рис. 5). При этом оба способа управления дают в основном одинаковые результаты.
На рис. 5-7 приведены результаты ухода на второй круг при условии увеличения массы самолета до 70000 кг. Снижение запаса полной энергии самолета привело к уменьшению разницы между двумя рассматриваемыми способами управления. Следует отметить, что даже в тяжелых условиях пониженной энергетики способ по изобретению (1) находит возможность сократить протяженность работы двигателей на взлетном режиме.
Список использованных источников
1. Гуськов Ю.П., Загайнов Г.И. Управление полетом самолетов: Учебное пособие для студентов высших технических учебных заведений. - 2-е изд., пере-раб. и доп. - М: Машиностроение, 1991. 272 стр.
2. Шевченко A.M., Борисов В.Г., Начинкина Г.Н. Технология проектирования высокоэффективных систем управления полетом. Научное издание. - М.: ИПУ РАН, 2010. - 83 стр.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЁТА САМОЛЁТА С УЧЕТОМ СТАБИЛИЗАЦИИ СКОРОСТИ | 2018 |
|
RU2689054C1 |
| СПОСОБ УПРАВЛЕНИЯ УБОРКОЙ МЕХАНИЗАЦИИ КРЫЛА САМОЛЕТА ТРАНСПОРТНОЙ КАТЕГОРИИ | 2012 |
|
RU2494922C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА НА ПОСАДКЕ | 2015 |
|
RU2588173C1 |
| Способ управления самолётом в режиме системы автоматического управления "Посадка" | 2024 |
|
RU2830919C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ БЕЗДВИГАТЕЛЬНОЙ ПОСАДКЕ | 2005 |
|
RU2321524C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СИСТЕМОЙ ОБЕСПЕЧЕНИЯ БОЛЬШОЙ ПОДЪЕМНОЙ СИЛЫ САМОЛЕТА | 2008 |
|
RU2478520C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДНОГО ИНДЕКСА ДЛЯ УПРАВЛЕНИЯ ТЯГОЙ ДВИГАТЕЛЯ САМОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509037C1 |
| СПОСОБ И УСТРОЙСТВО, СПОСОБСТВУЮЩИЕ УПРАВЛЕНИЮ ПОЛЕТОМ САМОЛЕТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2006 |
|
RU2351898C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
Изобретение относится к способу управления самолетом в режиме САУ «Уход на второй круг». Для управления самолетом приборную скорость формируют с учетом максимально допустимой скорости полета (VFE) для текущего положения закрылков и предкрылков с линейной интерполяцией между узловыми точками с учетом запаса на понижение скорости, определяемое функцией защиты диапазона (ФЗД) скоростных параметров определенным образом. При включении режима САУ «Уход на второй круг» включают автомат тяги, в канале тяги сразу подключают режим стабилизации заданной на пульте управления САУ приборной скорости, соответствующей полету с убранной механизацией крыла, при этом автомат тяги в зависимости от условий полета управляет рычагами управления двигателями (РУД) так, чтобы совместно с траекторным управлением в продольном канале обеспечить желаемый набор высоты с нормированными градиентами набора высоты и разгоном до скоростей уборки механизации. Обеспечивается автоматизация процесса управления в режиме «уход на второй круг» и повышение безопасности полета. 7 ил., 1 табл.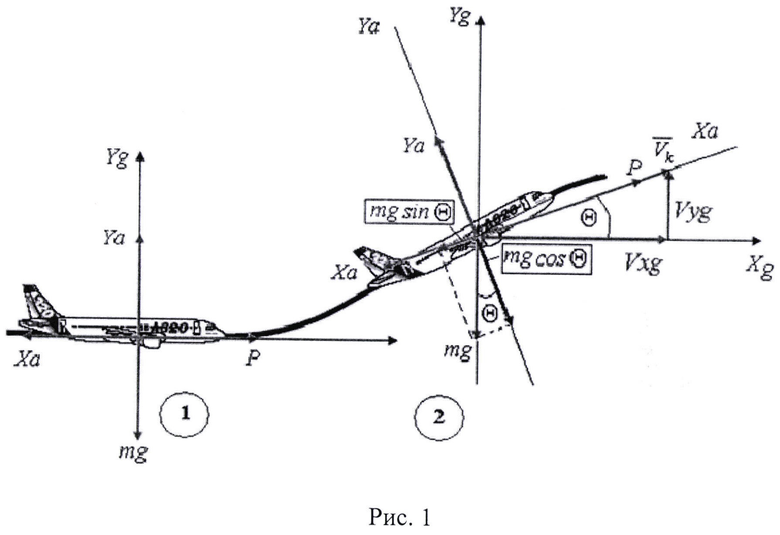
Способ управления самолетом в режиме САУ «Уход на второй круг», в котором заданная приборная скорость формируется с учетом максимально допустимой скорости полета (VFE) для текущего положения закрылков и предкрылков с линейной интерполяцией между узловыми точками с учетом запаса на понижение скорости, определяемое функцией защиты диапазона (ФЗД) скоростных параметров:
Vпр.зад.=VFЕ(δз/δпр)-15 км/ч,
где: 15 км/ч - запас для ФЗД,
при этом при включении режима САУ «Уход на второй круг» включают автомат тяги, в канале тяги сразу подключают режим стабилизации заданной на пульте управления САУ приборной скорости, соответствующей полету с убранной механизацией крыла, при этом автомат тяги в зависимости от условий полета управляет рычагами управления двигателями (РУД) так, чтобы совместно с траекторным управлением в продольном канале обеспечить желаемый набор высоты с нормированными градиентами набора высоты и разгоном до скоростей уборки механизации.
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2003 |
|
RU2249540C2 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ПОЛЁТА САМОЛЁТА С УЧЕТОМ СТАБИЛИЗАЦИИ СКОРОСТИ | 2018 |
|
RU2689054C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЛАВНЫМ УВЕЛИЧЕНИЕМ ТЯГИ ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, КОМПЬЮТЕРОЧИТАЕМЫЙ НОСИТЕЛЬ ДАННЫХ | 2017 |
|
RU2735650C2 |
| US 20220254258 A1, 11.08.2022 | |||
| US 10755587 B2, 25.08.2020. | |||

